Цифровой двойник перекрёстка для адаптивного управления светофорными фазами

Автор: Папуловская Н.В., Прытков Д.И.
Статья в выпуске: 3 (68) т.21, 2025 года.
Бесплатный доступ
В работе представлена разработка адаптивной системы управления дорожным движением (СУДД) для одиночного перекрёстка, направленной на повышение его пропускной способности. Предложенное решение представляет собой цифровой прототип интеллектуальной СУДД, реализованной на языке Python и включающий графический интерфейс пользователя (GUI) для мониторинга и настройки. Для сбора данных о транспортных средствах (ТС) и пешеходов был интегрирован модуль машинного зрения на основе нейронной сети YOLOv4‑Tiny. Система реализует алгоритм управления, подстраивающий временные параметры светофорных фаз в реальном времени согласно 3 разработанным сценариям: ночной, часы пик и средняя нагрузка. Для проведения сравнительного анализа эффективности была создана имитационная модель цифрового двойника (ЦД) в среде AnyLogic. Моделирование включало оценку пропускной способности при различных сценариях. Результаты показали, что внедрение адаптивных алгоритмов управления снижает среднее время проезда перекрёстка на 14-32 % по сравнению с традиционными статическими алгоритмами.
Цифровой двойник, система управления дорожным движением, светофор, адаптивное управление, перекресток, имитационное управление, машинное зрение
Короткий адрес: https://sciup.org/14133907
IDR: 14133907 | УДК: 004.896; 004.451.25
Digital twin of an intersection for adaptive traffic light phase control
The paper presents the development of an adaptive traffic control system (ATCS) for a single intersection, aimed at increasing its throughput. The proposed solution is a digital prototype of an intelligent ATCS implemented in Python and equipped with a graphical user interface (GUI) for monitoring and adjustment. A computer vision module based on the YOLOv4-Tiny neural network was integrated for collecting data on vehicles and pedestrians. The system implements a control algorithm that adjusts traffic light phase timings in real time according to three designed scenarios: night mode, peak hours, and medium load. For comparative efficiency analysis, a digital twin (DT) simulation model was developed in AnyLogic. The simulation included throughput assessment under different scenarios. The results showed that the introduction of adaptive control algorithms reduces the average intersection travel time by 14–32% compared to traditional static algorithms.
Текст научной статьи Цифровой двойник перекрёстка для адаптивного управления светофорными фазами
В современных городах наблюдается ежегодный рост количества транспортных средств
(ТС), что увеличивает нагрузку на перекрёстки, которые являются ключевыми элементами улично-дорожной сети, и делает их основными точками концентрации заторов и дорожнотранспортных происшествий (ДТП) [1, 2].
Существует проблема неравномерного распределения транспортного потока в различное время суток. Например, утренние и вечерние часы в будние дни требуют особого внимания на определенных участках дорог, чтобы обеспечить более плавное дорожное движение. Для решения этих проблем требуется не только расширение дорожной инфраструктуры, в виде увеличения числа полос, строительства новых и перестройки имеющихся дорог, но и необходимы технологические решения, такие как, например, разработка «умных» систем управления трафиком, основанных на искусственном интеллекте, которые представляют инструменты для более эффективного регулирования автомобильных потоков и способны адаптироваться к изменяющимся внешним условиям дорожного движения.
Традиционные статические системы управления дорожным движением (СУДД) используют фиксированные временные интервалы для регулирования трафика. Такие системы не обладают гибкостью и не способны оперативно реагировать на колебания интенсивности транспортных потоков, особенно в часы пик, что ведёт к неэффективному использованию ресурсов и простоям [3, 4]. Внедрение современных адаптивных СУДД показало эффективность [5, 6], но их приобретение и эксплуатация требует значительных финансовых затрат. В связи с этим, актуальной задачей становится разработка локальной интеллектуальной СУДД, способной адаптироваться к изменению дорожной обстановки без дорогостоящей централизации.
Авторы в работе [7] с помощью электродинамического моделирования установили, что адаптивный светофор способствовал улучшению транспортной ситуации на перекрестках в городе Ростов-на-Дону. Адаптивные системы активно используются на перекрестках с переменной интенсивностью, например такая система внедрена в городе Москва, что сократило среднее время прохождения общественного транспорта на 35% [8].
Цель нашей работы: разработать прототип адаптивной СУДД с использованием модуля машинного зрения для одиночного узла перекрёстка без дорогостоящих датчиков и серверов на примере перекрестка Шефская-Краснофлотцев, города Екатеринбург. Протестировать эффективность прототипа и сравнить с существующим решением.
Методика проведения исследования
В СУДД существуют различные технологии для сбора и анализа данных о движении ТС, что позволяет адаптировать режимы работы светофора в реальном времени в зависимости от текущей ситуации на дорогах. К таким технологиям относят датчики транспортного потока, камеры, а также связь между ТС и светофорами.
Датчики транспортного потока представляют собой устройства, в виде индукционных петлей или радаров, которые устанавливаются на дорогах, собирают данные о скорости, количестве и типе проходящих ТС. Далее полученные данные используется для оценки текущей интенсивности движения и передается в СУ светофорами для корректировки режимов работы, что приводит к увеличению скорости ТС, а также снижению аварийности на дорогах [8]. К недостаткам таких датчиков можно отнести то, что они могут быть чувствительны к погодным условиям, а также требуют регулярное обслуживание.
Технологии в виде видеокамер наблюдают за дорожным движением и передают изображения в центр управления, где алгоритмы компьютерного зрения и обработка изображений предоставляет количество объектов на перекрестках, таких как автомобилей, пешеходов, а также различных велосипедистов. С помощью этих данных определяется уровень загруженности на дорогах, что в дальнейшем помогает корректировать режимы работы светофоров. В работе [9] был проведен анализ дорожного и пешеходного трафиков на перекрестке с применением нейросетей, где данные поступали с камер уличного наблюдения. В данной работе за основу «умного» светофора использовался принцип создания минимальных воздействий на пешеходный трафик и обеспечения максимальной пропускной способности ТС при повороте направо, что увеличило пропускную способность прямо на 810%, а направо до 50%. Данные технологии для эффективного анализа движения требуют высокой пропускной способности для обработки видео, а также хорошую видимость.
Инфраструктура связи между ТС и светофорами по технологии Vehicle-to-Infrastructure (V2I) позволяет автотранспорту обмениваться данными с контроллером перекрестков, что позволяет СУ предсказывать и реагировать на трафик, оптимизируя работу светофоров. Данная технология помогает собирать детальное описание транспортных потоков, таких как маршрут ТС, скорость и их положение [10], что позволит в дальнейшем использовать эти данные для оптимизации потоков. Для данной технологии необходимо обеспечить безопасность передаваемых данных, а также стабильную связь.
Каждая из технологий значительно улучшает эффективность СУ, они позволяют адаптировать светофоры к реальной интенсивности дорожного движения и уменьшают задержки для водителей. Однако каждая из технологий имеет свои недостатки, и необходимо учитывать их перед внедрением в систему.
Для данного исследования был выбран подход с использованием сбора данных с помощью камер. Это решение обусловлено необходимостью работы с разнородными объектами. Камеры предоставляют гибкость, которая важна для адаптивных алгоритмов управления, учитывающих как транспортные, так и пешеходные потоки. Камеры также позволяют значительно расширить функциональность системы в будущем. Например, можно добавлять новые алгоритмы машинного зрения для анализа разных необычных ситуаций.
Адаптивная СУДД с использованием интерфейса была разработана с помощью языка Python и ее встроенных библиотек и модулей ( Tkinter, Threading, Datetime, Time). Одним из важных преимуществ использования языка Python стало то, что он позволяет интегрировать различным модули системы для обработки видеопотока с камер, а также понятную документацию.
Для реализации модуля машинного зрения, а именно для подсчета количество ТС, в составе СУДД была выбрана модель сверточной нейронной сети YOLOv4-Tiny, которая позволяет обрабатывать видеопоток с камер с высокой скоростью и достаточной точностью [11]. YOLO разделяет изображение на сетку и в каждой ячейке предсказывает вероятность наличия объекта и его класс, что делает его подходящим инструментов для задачи светофорного управления [12].
Порядок чередования сигналов, их вид и значение, принятые в России, соответствуют международной Конвенции о дорожных знаках и сигналах. Светофоры переключаются в следующей последовательности: красный - красный с желтым - зеленый - желтый - красный. Этот порядок обеспечивает предсказуемость и безопасность для всех участников дорожного движения, что особенно важно в условиях интенсивного трафика.
Длительность сигнала «красный с желтым» рекомендуется устанавливать не более 2 секунд. Этот промежуточный сигнал служит для подготовки водителей к началу движения, сигнализируя о предстоящем включении зеленого света. Длительность желтого сигнала, который предупреждает о скором включении красного света, необходимо устанавливать на время 3 секунды. Это время должно быть достаточно для безопасной остановки транспортных средств перед перекрестком.
Рекомендуется, чтобы все светофоры, установленные на одном светофорном объекте, работали во взаимосогласованных режимах. Согласование режимов работы светофоров обеспечивает плавность и координацию движения транспортных средств и пешеходов, снижая вероятность заторов и повышая общую пропускную способность перекрестков. Это особенно
том 21 № 3 (68), 2025, ст. 2
актуально в условиях плотного городского трафика, где оптимальная работа светофоров напрямую влияет на эффективность транспортной системы.
Важным аспектом является учет различных временных интервалов в течение суток. Например, в часы пик, когда нагрузка на дорожную сеть максимальна, светофоры могут работать с укороченными циклами, чтобы ускорить пропускную способность. В ночное время, когда трафик снижен, интервалы могут быть увеличены для экономии энергии и снижения износа оборудования.
Кроме того, современные системы светофорного управления могут включать адаптивные алгоритмы, которые изменяют продолжительность сигналов в зависимости от текущих дорожных условий. Эти системы используют данные с дорожных датчиков и камер для оптимизации работы светофоров в режиме реального времени. Например, при обнаружении скопления транспорта на одном из направлений, система может увеличить продолжительность зеленого сигнала для этого направления, чтобы быстрее разгрузить перекресток.
Таким образом, продуманное чередование сигналов, использование цифровых табло, согласование режимов работы и адаптивные алгоритмы управления светофорами играют ключевую роль в обеспечении безопасности и эффективности дорожного движения.
Для создания цифрового двойника был выл выбран перекресток Шефская-Краснофлотцев (гор. Екатеринбург) с двумя полосами движения на каждом подходе и выделенной пешеходной фазой (рисунок 1).

Рис. 1. Снимок перекрестка Шефская-Краснофлотцев
Для построения модели цифрового двойника перекрестка и проведения эффективности пропускной способности использовалась платформа имитационного моделирования AnyLogic, обеспечивающая моделирование системы на базе графического интерфейса, событий логики и агентов [13]. Цифровой двойник перекрёстка реализован как гибридная платформа «Python - AnyLogic», которая включает три логических уровня:
-
1) уровень сбора данных:
-
- камера наблюдения с физической локации передаёт видеопоток в модуль машинного зрения (OpenCV + YOLO v4);
-
- алгоритмы детекции формируют покадровый счётчик объектов;
-
2) уровень обработки и принятий решения:
-
- Python ядро;
-
- сценарий (ночь, день, «час-пик»);
-
3) уровень визуализации и тестирования:
-
- ПО AnyLogic;
-
- Модель перекрёстка (геометрия дорожной сети, светофорные объекты, симуляция ТС и пешеходов).
Основу модели составляют две основные библиотеки: Road Traffic Library и Pedestrian Library.
У крупных производителей: Sitraffic Fusion (Siemens) [14], Авангард (НПО РБС) [15], Hybrid Twins for Urban Transportation (FHWA) [16] есть промышленные платформы цифровых двойников для небольших перекрёстков, однако их внедрение не экономично, а также не проведена оценка эффективности с помощью моделей на конкретных перекрестках.
Результаты и обсуждение
Адаптивные сценарии
Алгоритм СУДД с выбирает сценарий управления в зависимости от времени суток представлен в таблице 1.
Таблица 1. Адаптивные сценарии
Сценарий Условия Логика фаз Ночной 00:00-05:00 Статические: Tпеш=14с, T₁₂= T₃₄ =34с Часы пик Часы пик будней Tпеш=16с, оставшееся время делится пропорционально загрузке дорог 1-2 и 3-4 Средняя нагрузка Прочее время Тпеш рассчитывается по количеству пешеходов (14-24 с), затем - перераспределение T12, T34 как в сценарии 2
том 21 № 3 (68), 2025, ст. 2
Визуальное отображение работы системы распознавания на рисунке 2.
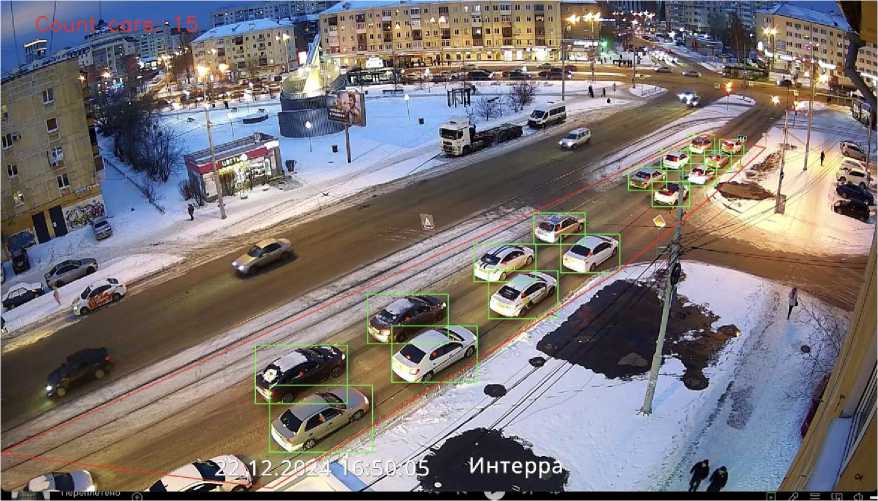
Рис. 2. Визуальное отображение работы системы распознавания ТС
Цифровой двойник
Перекрёсток смоделирован как четырёхполосный узел с выделенной пешеходной фазой. В модель введены параметры появления и поведения ТС и пешеходов, стоп‑линии, светофоры и счетчики интенсивности. Временные параметры фаз поступают из внешнего файла, что позволяет тестировать разные алгоритмы без перекомпиляции (рисунок 3).
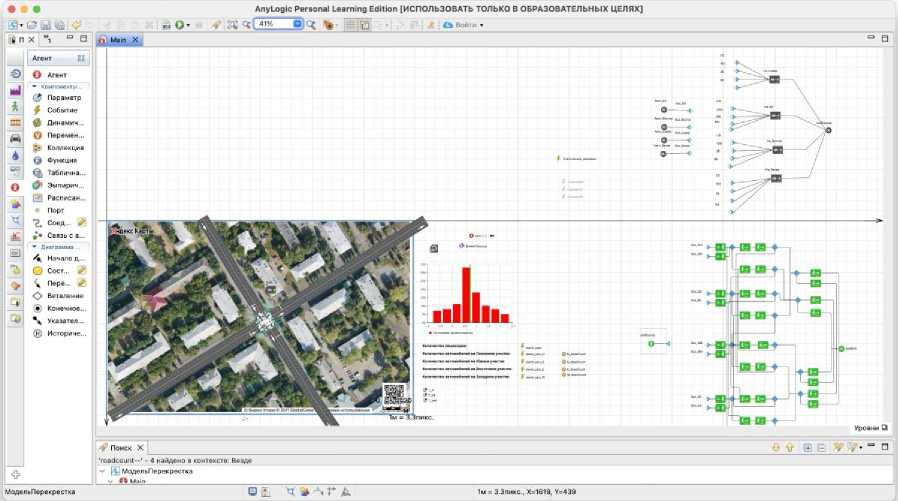
Рис. 3. Модель перекрестка Шефская-Краснофлотцев
Для каждого алгоритма (методика, параметры действующего светофора, Сценарии 1-3)
проведены трёхкратные симуляции длительностью 5 ч. метрика - среднее время проезда перекрёстка для одного ТС (таблица 2), где алгоритм 1 – временные параметры, рассчитанные с помощью методического документа [17], а алгоритм 2 – реально существующие временные параметры.
Таблица 2. Сравнение сценариев управления с другими алгоритмами
|
Условия |
Алгоритм 1 |
Алгоритм 2 |
Сценарии 1-3 |
|
Ночь |
52,09 с |
51,19 с |
52,16 с |
|
Часы пик |
195,39 с |
150,82 с |
132,64 |
|
Средняя нагрузка |
94,95 с |
76,6 с |
71,42 |
Сценарий 1 (ночь) не ухудшает показатель ночью, оставаясь простым и надёжным.
Сценарий 2 («час пик») уменьшил задержку на 32 % относительно расчётной методики и на 17% относительно статической схемы.
Сценарий 3 (день) показал наименьшее время (-25 % к методике) и продемонстрировал универсальность при равномерной нагрузке.
Результаты и обсуждение
В представленной работе были получены следующие результаты:
-
1. Разработана адаптивная СУДД, интегрирующая YOLOv4‑Tiny и цифровой двойник перекрёстка.
-
2. Предложенные 3 сценария охватывают полный суточный цикл и обеспечивают адаптивность без дорогих датчиков.
-
3. Моделирование в AnyLogic доказало уменьшение среднего времени проезда до 32% в самые загруженные периоды.
-
4. Система реализована на открытом ПО (Python, OpenCV, AnyLogic PE), что упрощает внедрение на перекрёстках малых городов.
Дальнейшее развитие модели должно сопровождаться комплексной оптимизацией как на уровне логики алгоритмов, так и на уровне технической реализации. Это необходимо для повышения надёжности и реалистичности модели, а также подготовки к масштабированию и внедрению более сложных подходов в следующих этапах работы.
Заключение
Разработанное решение представляет собой экономичную интеллектуальную СУДД для одиночного перекрестка. Прототип реализован на языке Python с GUI. Система интегрирует модуль машинного зрения YOLOv4-Tiny для оперативного подсчёта ТС и пешеходов, что позволяет системе в режиме реального времени подстраивать временные параметры светофорных фаз.
Для анализа эффективности разработанных алгоритмов была создана имитационная модель реально существующего перекрестка в среде AnyLogic.
Предложенные сценарии управления обеспечивают гибкость и адаптивность системы по сравнению со статическими алгоритмами. Сравнительный анализ показал, что внедрение адаптивной системы позволяет увеличить пропускную способность перекрестка до 32%.
Теоретическая и практическая значимость исследования заключается в том, что разработанная система может быть использована для повышения эффективности управления на одиночных узлах перекрестка с использованием современных технологий. Работа может быть продолжена в направлении практического внедрения и адаптации системы к более сложным условиям, опираясь на успешное применение ЦД и алгоритмов машинного зрения. Таким образом интеграция цифрового двойника и машинного зрения обеспечивает гибкость и адаптивность СУДД, подтверждая эффективность разработанной системы.
