Цифровой метод реализации задержки отраженного сигнала в комплексе полунатурного моделирования работы импульсных СБРЛ

Автор: Андрюшин Олег Федорович, Болдырев Геннадий Михайлович, Рыжов Игорь Альбертович, Фабричный Михаил Григорьевич, Шульгач Олег Владимирович
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 2-3, 2010 года.
Бесплатный доступ
Рассмотрена схема построения цифровой линии задержки для моделирования отраженного сигнала в комплексах полунатурного моделирования работы импульсных систем ближней радиолокации. Схема цифровой линии задержки с вводом информации через USB-порт реализована на основе ПЛИС фирмы XILINX. Приведены примеры экспериментально снятых осциллограмм.
Полунатурное моделирование, математическая модель, управляемая линия задержки, массив данных, плис
Короткий адрес: https://sciup.org/14967010
IDR: 14967010
Текст научной статьи Цифровой метод реализации задержки отраженного сигнала в комплексе полунатурного моделирования работы импульсных СБРЛ
П ри проектировании автоматизированных комплексов полу-натурного моделирования (АКПНМ) работы систем ближней радиолокации (СБРЛ) в имитаторах отраженного сигнала, моделирующих задержку зондирующего сигнала на трассе его прохождения до объекта локации и обратно, широко используются линии задержки, реализуемые с помощью отрезков кабелей и волноводов [1].
При всей простоте и очевидности аппаратурного решения такие линии задержки обладают определенными недостатками. Они имеют ощутимые габариты и массу, кроме того, используемые в них СВЧ-переключатели, компенсирующие потери усилителей, значительно увеличивают стоимость подобных линий задержки.
Вместе с тем существуют реальные возможности разработки устройств управляемой линии задержки с использованием методов цифровой обработки информации, свободных от отмеченных недостатков.
Наиболее просто задача построения управляемой цифровой линии задержки (ЦЛЗ) решается применительно к аппаратуре моделирования и испытаний импульсных СБРЛ.
В этом случае моделирование необходимой задержки отраженного сигнала и изменение длительности входного импульса в имитаторе работы импульсных СБРЛ осуществляется с помощью СВЧ-генератора и программноаппаратного модуля, формирующего модулирующую функцию импульсного сигнала [2].
Структурная схема программно-аппаратного модуля, реализующего цифровую линию задержки, приведена на рис. 1 .
Массив данных, сформированный в математической модели, передается в память устройства через USB-порт.
-
1 – ФГУП «НПП «Дельта», г. Москва, заместитель директора по науке; 2 – ФГУП «НПП «Дельта», г. Москва, начальник отдела
-
3 - ФГУП «НПП «Дельта», ведущий инженер; 4 – ФГУП «НПП «Дельта», старший научный сотрудник;
-
5 – ГП НИИ «Орион», г. Киев, начальник лаборатории.
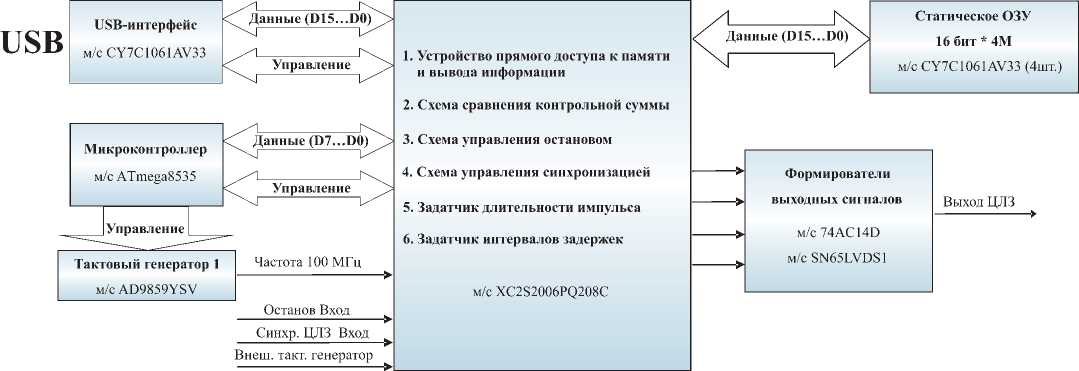
Рис. 1. Структурная схема программно-аппаратного модуля, реализующего управляемую задержку
Тактирование выдаваемых данных производится либо внутренним, либо внешним тактовым генератором, при этом тактовый генератор может работать как независимо, так и с синхронизацией от внешнего генератора импульсов.
Для моделирования отраженного импульса введено устройство независимой программной установки длительностей и задержки формируемых импульсов относительно момента прихода синхронизирующего импульса (зондирующего импульса СБРЛ).
Основные функции устройства реализованы на основе ПЛИС XC2S200-PQ208C фирмы XLINX и микроконтроллера ATmega8535.
Пришедшие через USB-порт от ПЭВМ данные записываются в память устройства (статическое ОЗУ на микросхемах CY71061AV33 объемом 8 Мб). Для тактирования формирователя импульсов используется тактовый генератор с частотой 100 МГц.
Основной подмодуль устройства, реализованный на микросхеме ПЛИС XC2S200 6PQ208C, обеспечивает:
-
♦ прямой доступ к памяти и вывод информации;
-
♦ управление остановом;
-
♦ управление синхронизацией;
-
♦ задание параметров импульсного сигнала.
Для обеспечения согласования с 50-омными кабельными входами внешних приборов, управляемых от PG-2008, в схему включены буферные устройства, собранные на микросхемах 74АС14D и SN65LVDS1. Выходные регистры построены на 16 м/с 74АСТ573.
Для расширения возможностей модуля предусмотрен дополнительный Pattern-генератор (виртуальный генератор) произвольного импульсного сигнала, который может использоваться в структуре АКПНМ для формирования импульсных помех, воздействующих на СБРЛ. При этом для формирования импульсных псевдослучайных последовательностей максимальной длины используется весь объем внешней памяти (8 Мб). Тактирование Pattern-генератора производится программируемым тактовым генератором с частотой 1…60 МГц (м/с AD9859YSV). Функции Pattern-генератора реализованы на ПЛИС XC2S200-6PQ208C.
В модуле дополнительно предусмотрен также вход для подключения внешнего генератора коротких импульсов (менее 10 нс) и управляемая 64-разрядная схема цифрового ввода-вывода для включения и выключения релейных устройств имитатора.
На фото 1 приведено разработанное устройство формирователя модулирующих функций импульсных сигналов. Формирование задержанного импульса требуемой длительности с помощью разработанного устройства производится следующим образом. Весь объем памяти устройства разбивается на подмассивы. Последовательность подмассивов соответствует последовательности тактов синхронизирующих (зондирующих) импульсов. Соответственно временное расположение импульса в пределах такта (или задержка импульса) определяется расположением «1» в переделах двоичного числа, определяющего числовое значение массива. Например, 10000000, 01000000 , 00100000 - три последовательных массива, определяющих три последовательных такта «движущегося» по оси времени импульса. Число последовательных «1» в пределах подмассива пропорционально длительности формируемого задержанного импульса. Абсолютное значение длительности определяется частотой внутреннего тактового генератора, который считывает сформированные массивы.
В реальном масштабе времени устройство работает следующим образом. В момент прихода синхронизирующего импульса (зондируюший импульс СБРЛ) внутренний тактовый генератор считывает значение массива и синхронизирующим импульсом запускается программируемый счетчик тактов внутреннего тактового генератора. Следующим синхронизирующим импульсом счетчик увеличивается на длину подмассива, и тем самым внутренним тактовым генератором считывается следующий


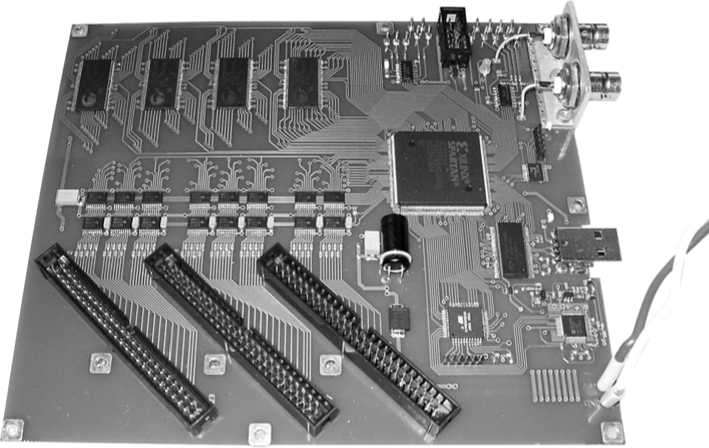
Фото 1. Формирователь модулирующих функций импульсных сигналов
са (зондируюшего импульса) может быть выставлена программным путем с шагом 10 нс.
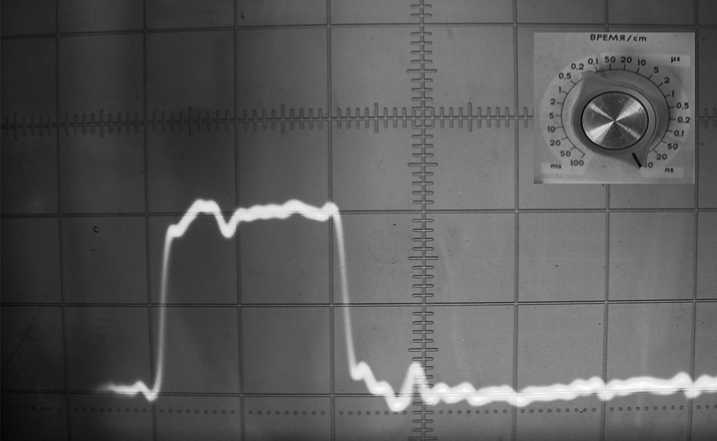
Минимальная задержка выдаваемого импульса относительно пришедшего зондирующего определяется техническими характеристиками используемой ПЛИС, внутренней программной организацией ПЛИС, расположением и характеристиками обрамляющих микросхем на печатной плате. В реализованном устройстве эта задержка составляет 25...30 нс. Фронт формируемого импульса в данном устройстве, как это следует из фото 2 , равен 2...5 нс.
На фото 3 в качестве примера приведены осциллограммы, полученные с помощью устройства модулирующих функций импульсного отраженного сигнала. Показаны три последовательных временных положения импульса при моделировании приближения СБРЛ к объекту локации.
Оценку требуемого объема памяти для реализации устройства цифровой управляемой задержки, моделирующего импульсный отраженный сигнал, можно произвести следующим образом.
При максимальной моделируемой дальности Dmax и погрешности моделирования дальности ΔD в каждом подмассиве необходимо иметь N1 = Dmax /ΔD бит. Число повторяющихся периодов n (то есть периодов Tповт с одинаковой задержкой отраженного импульса) также определяется погрешностью оценки дальности и может быть вычислено исходя из равенства:
n T повт V отн = ΔD , (1)
Фото 2. Вид фронтов отраженного импульса при установке развертки осциллографа 10 нс/клетка
где Vотн – скорость движения СБРЛ относительно объекта локации.
При этом число подмассивов оценивается по формуле:
подмассив. Разбиение на подмассивы и установки счетчика производятся программным путем до начала проведения эксперимента.
В целях повышения помехозащищенности в импульсных СБРЛ используют вобуляцию периода следования зондирующих импульсов. Для формирования отраженных импульсов в этом случае предусмотрено следующее: разделены функции перебора массивов и их выдачи при приходе синхронизирующих (зондирующих) импульсов. Таким об- разом, последовательный перебор массивов производится дополнительным тактовым генератором с жестко постоянным периодом. При приходе очередного синхроимпульса (зондирующего импульса) выдается тот подмассив, который в этот момент сформирован.
При тактовой частоте внутреннего тактового генератора 100 МГц минимальная длительность выдаваемого импульса равна 10 нс, т.е. задержка моделируемого отраженного импульса относительно синхроимпуль-
N2=t max /(n
) = (D max /V отн )/(nT повт ) , (2)
Tповт
где: tmax –время движения СБРЛ до дальности Dmax .
Из выражений (1) и (2) получаем количество подмассивов N2 = Dmax /ΔD .
Общий объем памяти определяется произведением N1 и N2 и равен (D max /ΔD)2 бит.
Например, при моделировании работы импульсных СБРЛ на дальностях 100…1 м с погрешностью 0,2 м общий
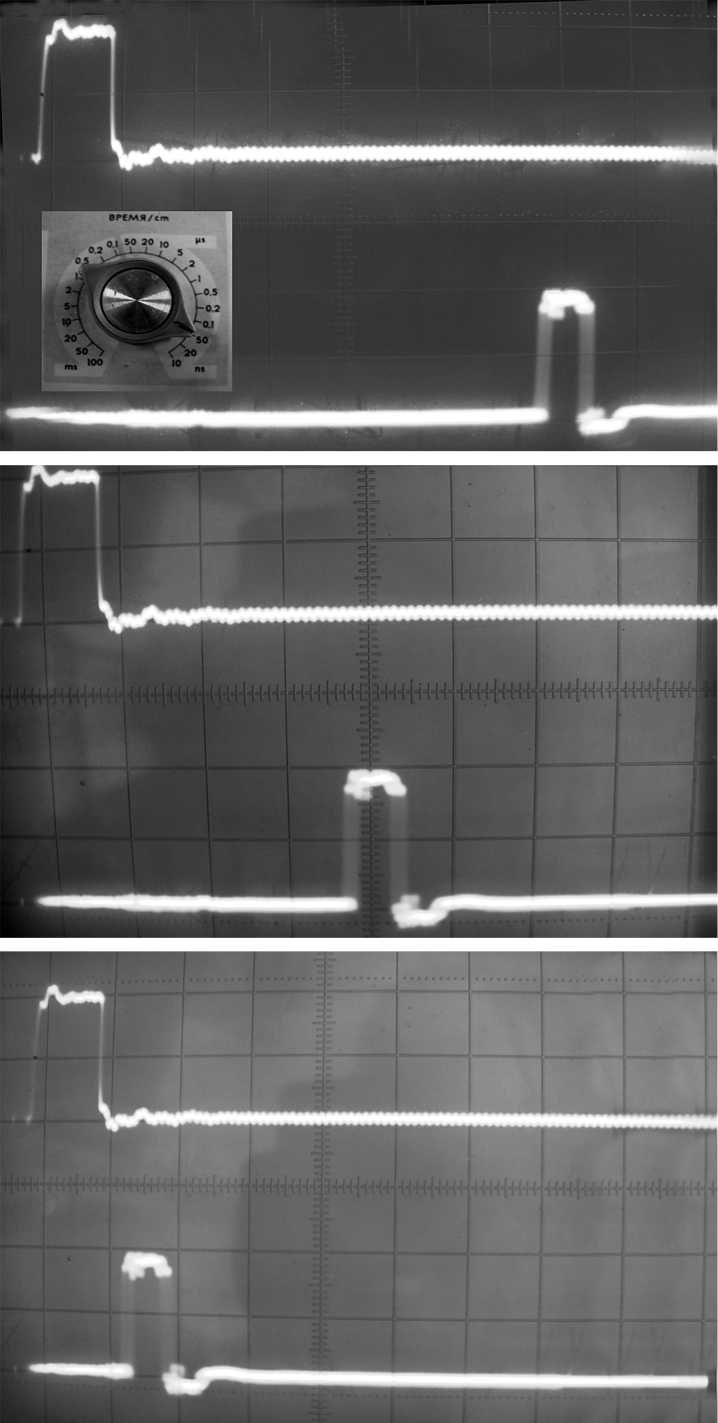
Фото 3. Три фазы перемещения импульса, имитирующего отраженный сигнал
объем памяти может быть не более 250 кбит.
Для уменьшения начальной задержки и соответственно уменьшения моделируемой дальности до значений долей и единиц метров необходимо использовать более быстродействующие ПЛИС. Эти ПЛИС к тому же имеют внутреннюю память большего объема, что при реализации модуля задержек позволит отказаться от внешней памяти и также улучшить характеристики быстродействия. Например, ПЛИС XC3S400-5PQ20-8C, имеющая ОЗУ 256 кбит, может работать от тактового генератора частотой 200...250 МГц, что обеспечит шаг задержки 4 - 5 нс и начальную задержку менее 10 - 15 нс.
Результаты исследований, изложенные в настоящей статье, получены в процессе выполнения НИР «Изучение радиофизических процессов формирования селективных признаков отражающих объектов в системах ближней радиолокации», поддержанной Российским фондом фундаментальных исследований в 2007 г. при проведении конкурса инициативных проектов (Соглашение № 07-1021/22).
Список литературы Цифровой метод реализации задержки отраженного сигнала в комплексе полунатурного моделирования работы импульсных СБРЛ
- Андрюшин О.Ф., Болдырев Г.М., Фабричный М.Г. Имитационное моделирование электродинамического взаимодействия систем ближней радиолокации с объектами, формирующими суммарный входной сигнал./Специальная техника, 2006. -№ 6.
- Андрюшин О.Ф., Болдырев Г.М, Павлов Г.Л., Сучков В.Б., Фабричный М.Г. Имитация отраженного эхо-сигнала в комплексах полунатурного моделирования работы систем ближней радиолокации./Оборонная техника, 2009. -Вып. 4/5.
