Comparative Study of Four Different Types of MTI Filters for Radar Clutter Rejection

Author: Priyabrata Karmakar, Sourav Dhar, Mithun Chakraborty, Tirthankar Paul
Journal: International Journal of Image, Graphics and Signal Processing(IJIGSP) @ijigsp
Article in issue: 5 vol.5, 2013.
Free access
In this paper MTI filter based clutter rejection technique is presented. How clutter rejection ability increases with the increase in Delay line canceleres in the MTI filter structure is shown here. Feedback path increases the response of a MTI filter and using feedback path four different types of MTI recursive filters are designed and tested for Radar clutter rejection. Matlab (7.9) is used as the simulation platform.
Radar, Clutter, Signal to Clutter ratio (SCR), MTI, Delay line canceler
Short address: https://sciup.org/15012707
IDR: 15012707
Text of the scientific article Comparative Study of Four Different Types of MTI Filters for Radar Clutter Rejection
-
I. INTRODUCTION
Radars are being primarily used for military purpose; this technology has been investigated for use on automobiles since the 1970s and has been employed for various functions on automobiles since the early 1980s. Initial usage of microwave RADAR was for collision warning applications on commercial vehicles such as ambulances, buses and trucks. RADAR has different types of sensors such as optical or infrared sensors, so they can perform equally well during the day, the night and in most weather conditions. Vehicle and highway automation is believed to reduce the risk of accidents, improve safety, increase capacity, reduce fuel consumption and enhance overall comfort and performance for drivers Radar returns are produced from nearly all surfaces when illuminated by radar. Therefore, in competition with the return from a target, there are many sources of unwanted signals. Unwanted signals in search radar are generally described as noise and clutter. Clutter is the term used and includes ground returns, sea returns, weather, buildings, birds and insects. The definition of clutter depends on the function of the radar. Since vehicles usually move much faster than weather or surface slow moving targets, velocity sensitive radar can eliminate unwanted clutter from the radar indicator. Radar systems that detect and process only moving targets are called Moving-Target Indicators ( MTI ). For airborne radar by considering polarization, space and Doppler frequency information of the radar echo an optimum polarization-space-time joint domain processing (PST-JDP) technique is proposed for clutter suppression, the covariance matrix eigen decomposition,
the spectral analysis and the resolution grid method), are utilized for deriving the performance of the optimum PST-JDP [1]. Target information is extracted in a clutter prone environment by introducing random clutters having returns comparable to target in channel model, cross-correlation preceded by signal processing is introduced to suppress clutter return and to extract target information [2]. Explicit expressions are derived for the probabilities of false alarm and detection of the normalized adaptive matched filter in Gaussian clutter [3]. Using STAP problem of detecting hazardous collision can be solved, (STAP) algorithms optimally filter the target signal from interference and noise exploiting the specific relationship between Direction Of Arrival (DOA) and Doppler for the ground clutter, to distinguish targets and ground clutter having different signatures in the radial ortho- radial velocity plane an optimal detector is proposed based on the oblique projection onto the signal subspace orthogonal to the clutter subspace [4].Clutter rejection for ground based moving vehicles can be done using the concepts of Artificial Neural Network, where a supervised network is created trained with known data after that network is being simulated for some unknown data for which cluttered signal received at the receiver after that by comparing cluttered signal with simulated data ,clutter can be rejected to get clutter free signal [5]. After applying several clutter removal techniques to radar receiver to reject ground clutter, some clutter still persist in the radar data, for that a statistical approach is taken to create a clutter map from radar data [6].For joint non homogeneous clutter background estimation and multi target tracking a recursive maximum likelihood (ML) method and an approximated Bayesian method were proposed to estimate the non homogeneous clutter spatial intensity. Both clutter estimation methods were integrated into the probability hypothesis density (PHD) filter. The mean and the covariance of each Gaussian function were estimated and used to calculate the clutter density in the updated equation of the PHD filter [7]. Target can be detected against spherically invariant random vector (SIRV) clutter in the presence of steering vector mismatches. Assuming that the mismatch of the steering vector satisfies the conic constraint [8]. For airborne random pulse repetition interval radar an adaptive clutter suppression method is proposed using prior knowledge of clutter boundary in Doppler spectrum by exploiting the intrinsic sparsity, compressed sensing based on iterative grid optimization (CS-IGO) is applied to directly recover the clutter spectrum with only the test range cell instead of non-homogeneous training data from adjacent range cells [9]. A novel approach is proposed to reject the direct-path wave and multipath echoes in digital radio mondiale (DRM)-based high frequency (HF) passive bistatic radar where target echoes need to be detected against the direct-path wave and multipath echoes, the signal is projected into a subspace orthogonal to the clutter subspace carrier by carrier, exploiting the fact that the direct-path wave and multipath echoes at the same carrier in orthogonal frequency division multiplexing (OFDM) waveform are totally correlated [10].Rest of the paper is organized as section II unveils how MTI filters rejects clutter using delay line cancelers, section III demonstrated how MTI filters can be implemented, section IV deals with different factors to define performance of MTI system, section V demonstrates about MTI recursive filters, section VI is for results and simulation and section VII finally concludes the paper.
-
II. CLUTTER REJECTION
The clutter spectrum is normally concentrated around DC (f=0) and multiple integers of the radar PRF, as illustrated in Fig 1.a. In CW radars, clutter is avoided or suppressed by ignoring the receiver output around DC, since most of the clutter power is concentrated about the zero frequency band. Pulsed radar systems may utilize special filters that can distinguish between slowly moving or stationary targets and fast moving ones. This class of filter is known as the Moving Target Indicator (MTI). MTI is a necessity in high-quality airsurveillance radars that operate in the presence of clutter. In simple words, the purpose of an MTI filter is to suppress target-like returns produced by clutter, and allow returns from moving targets to pass through with little or no degradation. In order to effectively suppress clutter returns, an MTI filter needs to have a deep stopband at DC and at integer multiples of the PRF. Fig 1.b shows a typical sketch of an MTI filter response, while Fig 1.c shows its output when the PSD shown in Fig 1.a. is the input as in [11]
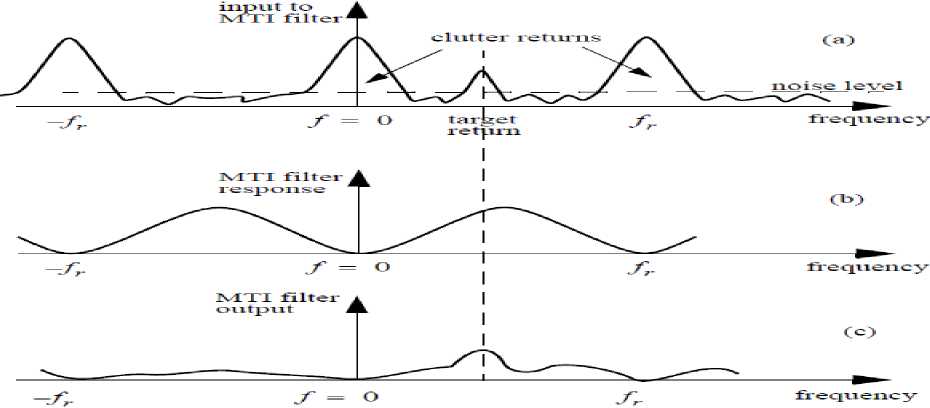
Figure 1. (a) Typical radar return Power Spectral Density when clutter and target are present. (b) MTI filter frequency response. (c) Output from an MTI filter.
From Fig 1.b it can be seen that MTI filter response has a deep stop band at DC and at integer multiples of PRF, so clutter’s target like returns concentrated around DC and integer multiples of PRF can be nullified as illustrated in Fig 1.c.More the deep will be stop band, clutter can be rejected more.
-
III. IMPLEMENTATION OF MTI FILTERS
MTI filters can be implemented using delay line cancelers. The frequency response of this class of MTI filter is periodic, with nulls at integer multiples of the PRF. Thus, targets with Doppler frequency equal to the integer multiples of PRF are attenuated, MTI filters can be implemented using delay line cancelers as in [1] and how performance of MTI filters is related with the numbers of delay line cancelers involved in implementing MTI filters is shown in section IV. Delay line cancelers with feedback loops are known as Recursive filters. The advantage of a Recursive filter is that through a feedback loop we will be able to shape the frequency response of the filter, in this paper we have concentrated on different configurations of MTI filters which is discussed in section V, an example of a Recursive filter using a single delay line canceler can be given in Fig 2.
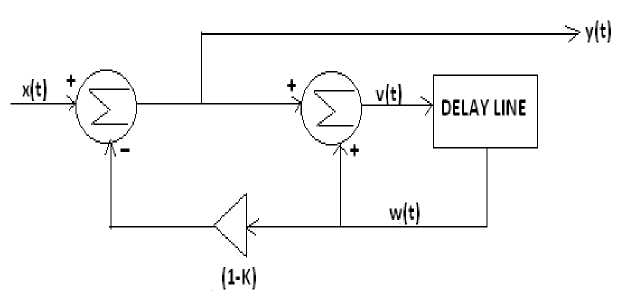
Figure 2.Single Canceler MTI Recursive Filter
A general expression for the Improvement factor for the n-pulse MTI is given by (5)
IF = 1 (fr)2(n-1)
Q (2(n-1)-1)!! 2σt
Gain of the filter is,
jwt 2
H(e )
(1 - e
jwt
Where Q2 is defined by
Q2 =
∑ n A 2
i = 1 i
(1 - Ke
jwt
It is clear that, by changing the gain factor ‘ K’ one can control the filter response. In order to avoid oscillation due to the positive feedback, the value of should be less than unity. The value (1-K)-1 is normally equal to the number of pulses received from the target.
IV. FACTORS TO DEFINE PERFORMANCE OF MTI SYSTEMS
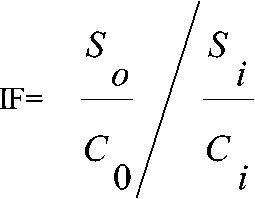
Two quantities that are normally used to define the performance of MTI systems are introduced. They are “Clutter Attenuation (CA)” and the MTI “Improvement Factor (IF)”.
CA is defined as the ratio between the MTI filter input clutter power C i to the output clutter power C O .
A → Binomial coefficients of MTI filter; i f → Pulse repetition frequency;
r
σ → Variance.
t
V. DIFFERENT CONFIGURATIONS OF RECURSIVE FILTER
A. TYPE 1 RECURSIVE FILTER
C
i
CA =
C o
The Improvement factor is defined as the ratio of the Signal to Clutter (SCR) at the output to the SCR at the input
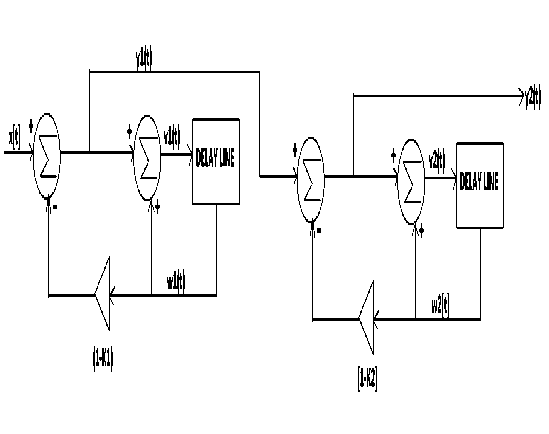
Figure 3.Type 1 Recursive filter
Gain of type 1 recursive filter can be given by (6)
This can be re written as
S
o
IF = CA
S
i
jwt 2
H(e ) =
(1-K e 1
(1 - e
- jwt 2 )
- jwt
) (1-K e
- jwt
B. TYPE 2 RECURSIVE FILTER
Gain of type 4 recursive filter can be given by (9)
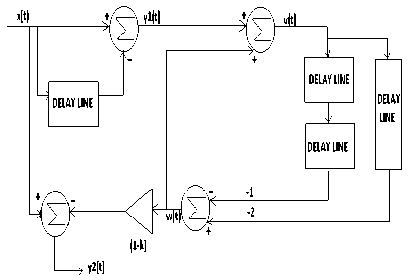
Figure 4.Type 2 recursive Filter
H(ejwt)
- jwt
1 - (1 - K)(2 - 3e J + e
2jwt
VI. RESULTS AND SIMULATION
Gain of type 2 recursive filter can be given by (7)
jwt
H(e )
1 - (1 - K )(1 - 2 e
jwt - 2 jwt + e )
C. TYPE 3 RECURSIVE FILTER
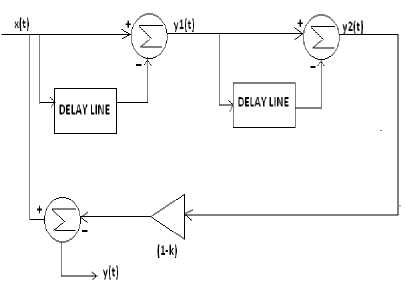
Figure 5.Type 3 recursive Filter
Gain of type 3 recursive filter can be given by (8)
H(ejwt)
- jwt
1 - (1 - K)(1 - 2e j + e
2jwt
D. TYPE 4 RECURSIVE FILTER
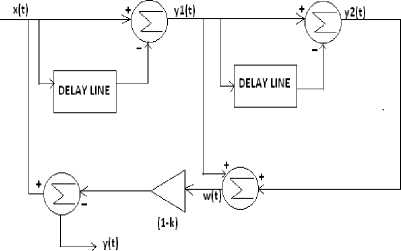
Figure 6.Type 4 recursive Filter
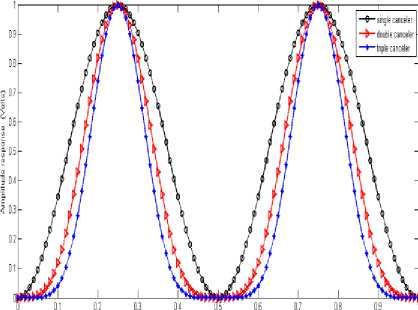
MATLAB (version 7.9) is used as the simulation platform. From simulation of single delay line canceler it is observed that frequency response of its has a deep stop band where as for double delay line canceler the stop band is more deep and in case of triple delay line canceler stop band is deeper than in cases of first two. So clutter rejection will be more in triple delay line canceler than the other two. Comparison of frequency responses of the three delay line cancelers shown in Fig 7
Normaiized ftequency
Figure 7.Comparison of frequency responses between triple with other two delay line cancelers
From Fig 7 it is clear that triple delay line canceler has deeper stop band than other two. So it can be concluded that triple delay line canceler MTI filter is more efficient to reject clutter than other two.
Clutter Attenuation (CA) and Improvement Factor (IF) as mentioned in section 4 for up to 10 Delay line cancelers are given in table 1.
Simulation parameters are given below,
f —— 800 Hz; G —— 6.4 Hz.
r
t
|
Number of Delay Line cancelers |
Clutter Attenuation(CA) in dB |
Improvement Factor(IF) in dB |
|
1 |
29.38 |
32.39 |
|
2 |
58.77 |
67.0 |
|
3 |
88.16 |
90.85 |
|
4 |
117.55 |
121.35 |
|
5 |
146.93 |
146.84 |
|
6 |
176.32 |
171.51 |
|
7 |
205.71 |
195.50 |
|
8 |
235.10 |
218.9 |
|
9 |
264.48 |
241.78 |
|
10 |
293.87 |
263.85 |
Figure 8.Variation of Clutter attenuation with Delay Lines
Figure 9. Variation of Improvement Factor with Delay Lines
Figure 10. Response of a Recursive filter for different valuesof ‘K’
Different responses of recursive filter for different values of gain factor ‘K’ is shown in fig 10,as the value of ‘K’ is decreased, notch of the filter becomes wider, and for wider notch, clutter rejection capability is more.
Figure 11. Comparison of responses among four different types of recursive filter
Comparison given in Fig 11, is the comparison of the responses of four different type of recursive filters which is observed and it is clear that type 3 recursive filter has the deepest stop band (wider notch) than other filters, so type 3 filter has the highest capability for clutter rejection than others as the frequencies corresponding to the clutter spectrum are made stop to pass from type 3 filter is more than others if the same received signal is fed to the four different type of filters, this conclusion can be more strongly established by looking at fig 12 where Signal to Clutter ratio(SCR) for type 3 filter is the highest comparing to the other three types of filters.
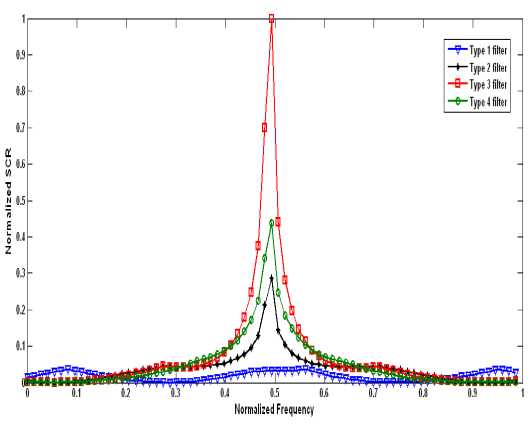
Figure 12. Comparison of Signal to Clutter ratio (SCR) among four different types of MTI recursive filter
-
VII. CONCLUSION
Finally it can be concluded that with the increase in delay line cancelers in implementing MTI filters, clutter rejection of MTI filters are getting increased, feedback path increases the efficiency of MTI filters to reject and among four different types of MTI recursive filter which were designed, type 3 filter has the maximum capability of clutter rejection which can be further verified by mean and variance of normalized SCR given in table 2,where mean and variance of normalized SCR are maximum for type 3 filter comparing to the other three.
Table 2. Mean and Variance of Normalized SCR for four different types of MTI recursive filter
|
Filter |
Mean |
Variance |
|
Type 1 filter |
0.01604 |
0.00148 |
|
Type 2 filter |
0.03912 |
0.00221 |
|
Type 3 filter |
0.07374 |
0.02454 |
|
Type 4 filter |
0.05163 |
0.00631 |
MTI filters are used to detect targets in the presence of static clutter, various parts of this paper deals with how efficiency of MTI filters can be increased for clutter rejection and if type 3 recursive filter can be implemented at the radar receiver then detecting of moving targets in the presence of static clutter can be possible with greater efficiency and thus collisions can be avoided among the moving targets (vehicles)
References Comparative Study of Four Different Types of MTI Filters for Radar Clutter Rejection
- D. Wu, Z. Xu, L. Zhang, Z. Xiong, and S. Xiao," PERFORMANCE ANALYSIS OF POLARIZATION-SPACE-TIME THREE-DOMAIN JOINT PROCESSING FOR CLUTTER SUPPRESSION IN AIRBORNE RADAR", Progress In Electromagnetics Research, Vol. 129, 579-601, 2012
- D.Kandar et al, "CLUTTER REJECTION IN OUTDOOR RADAR OPERATION BY CORRELATION METHOD FOR KNOWN TARGET", Journal of Information Systems and Communication, ISSN: 0976-8742 & E-ISSN: 0976-8750, Volume 3, Issue 1, 2012, pp.-332-334
- Jun Liu, Zi-Jing Zhang, Yun Yang, and Min Wang," Probabilities of False Alarm and Detection for the NAMF Operating in Gaussian Clutter", IEEE SIGNAL PROCESSING LETTERS, VOL. 19, NO. 10, August 2012
- P.Goy, F.Vincent, J.Tourneret, "Clutter rejection for MTI radar using a single antenna and a long integration time", 4th IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), 13-16 Dec. 2011
- P.Karmakar, S.Dhar, M.Chakraborty, T.Paul, "Application of Artificial Neural Network for Clutter Rejection", MECS publisher, International Journal of Computer network and Information Security, vol.4, no.10, pp.55-62, 2012, ISSN: 2074-9104.
- Valliappa Lakshmanan, Jian Zhang, Kurt Hondl, and Carrie Langston," A Statistical Approach to Mitigating Persistent Clutter in Radar Reflectivity Data", IEEE JOURNAL OF SELECTED TOPICS IN APPLIED EARTH OBSERVATIONS AND REMOTE SENSING, VOL. 5, NO. 2, APRIL 2012
- X. CHEN, R.THARMARASA, M. PELLETIER, T. KIRUBARAJAN, "Integrated Clutter Estimation and Target Tracking using Poisson Point Processes", IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 48, NO. 2 APRIL 2012
- X. Dai, G. Cui, and L. Kong," ROBUST ADAPTIVE DETECTION AGAINST SIRV CLUTTER IN THE PRESENCE OF STEERING VECTOR MISMATCHES", Progress In Electromagnetics Research C, Vol. 26, 245-257, 2012
- Z. Liu, X. Z. Wei, and X. Li," ADAPTIVE CLUTTER SUPPRESSION FOR AIRBORNE RANDOM PULSE REPETITION INTERVAL RADAR BASED ON COMPRESSED SENSING", Progress In Electromagnetics Research, Vol. 128, 291-311, 2012
- Z.Zhao et al, "Multipath clutter rejection for digital radio mondiale-based HF passive bistatic radar with OFDM waveform", IET Radar, Sonar & Navigation, Volume 6, issue9, December 2012, p. 867 – 872.
- Bassem R. Mahafza (2000), "Radar Systems Analysis and Design Using MATLAB", CHAPMAN & HALL/CRC
