Датчики на постоянных магнитах с использованием вращательного перемагничивания материала

Автор: Захаров Владимир Анатольевич, Молин С.М., Леньков С.В., Колясев В.А., Копытов А.Г., Гусев М.А.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Работы с конференции
Статья в выпуске: 1 т.29, 2019 года.
Бесплатный доступ
Исследованы функциональные возможности магнитных датчиков с двухполюсным намагничивающим устройством на постоянных магнитах и преобразователем магнитного поля с нормальной ориентацией оси чувствительности по отношению к направлению намагничивающего поля. Показана возможность работы приборов в режиме поворота датчика применительно к контролю механических свойств и напряженно-деформированного состояния изделий из ферромагнитных материалов.
Магнитный датчик, напряженность магнитного поля, ферромагнитные материалы, коэрцитивная сила, относительная деформация
Короткий адрес: https://sciup.org/142218194
IDR: 142218194 | УДК: 620.179.14 | DOI: 10.18358/np-29-1-i7175
Sensors based on permanent magnets using rotational magnetization of the material
The functional capabilities of magnetic sensors with a two-pole magnetizing device on permanent magnets and a magnetic field transducer with a normal orientation of the sensitivity axis in relation to the direction of the magnetizing field are investigated. The possibility of operation of devices in the mode of rotation of the sensor in relation to the control of mechanical properties and stress-strain state of products made of ferromagnetic materials.
Текст научной статьи Датчики на постоянных магнитах с использованием вращательного перемагничивания материала
Для определения структуры, механических свойств и напряженно-деформированного состояния (НДС) изделий из ферромагнитных материалов широко применяются приборы с накладными (приставными) датчиками [1]. Общий недостаток этих устройств — необходимость перемагничивания контролируемого изделия по предельной петле гистерезиса, большое энергопотребление при использовании электромагнитов, сложность конструкции приставных датчиков, неудобство их крепления на объекте в случае длительного мониторинга его состояния.
ДАТЧИКИ С ПОСТОЯННЫМИ МАГНИТАМИ
Приборы с накладными датчиками, выполненными на основе постоянных магнитов, выгодно отличаются от устройств с электромагнитами, поскольку имеют более простую конструкцию, меньшую энергоемкость, возможность работы в режиме непрерывного съема полезного сигнала датчика [2]. Одна из разновидностей датчиков указанного типа представлена на рис. 1 [3].
Намагничивающее устройство (НУ) датчика состоит из двух постоянных магнитов в форме прямоугольного параллелепипеда с антипарал-лельным направлением намагниченности. Там же установлен преобразователь магнитного поля (ПМП), расположенный в нейтральной плоскости НУ, причем ось чувствительности ПМП перпендикулярна направлению намагничивающего поля (вектора Не поля магнитов). При установке датчи- ка на поверхность изделия из ферромагнитного материала в последнем образуется намагниченность М, совпадающая по направлению с вектором Не. В отсутствие поворота датчика относительно оси Z показания ПМП равны нулю.
При повороте (вращении) датчика вокруг оси Z (например, против часовой стрелки, как показано стрелкой на рис. 2) происходит вращательное перемагничивание материала.
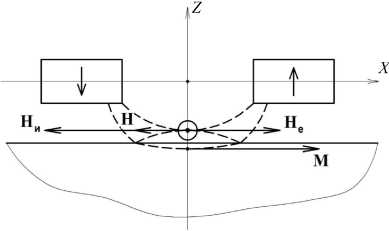
Рис. 1. Конструкция датчика на постоянных магнитах
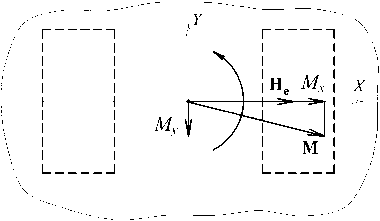
Рис. 2. Формирование намагниченности в образце при повороте НУ датчика
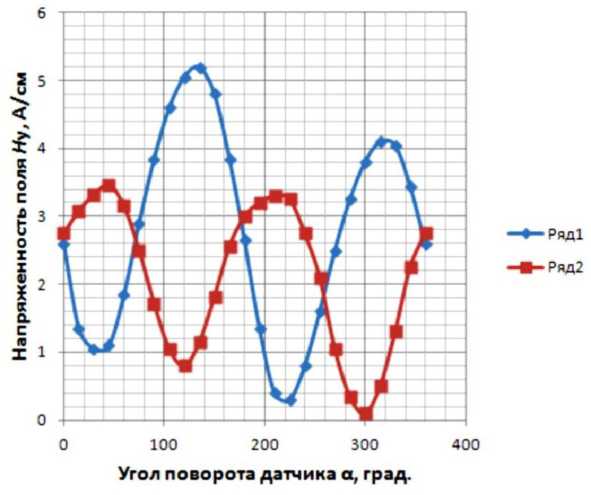
Рис. 3. Зависимость параметра Н у от угла поворота α датчика структуроскопа при 2 предельных значениях деформации.
Ряд1 — e 0. Ряд2 — e М
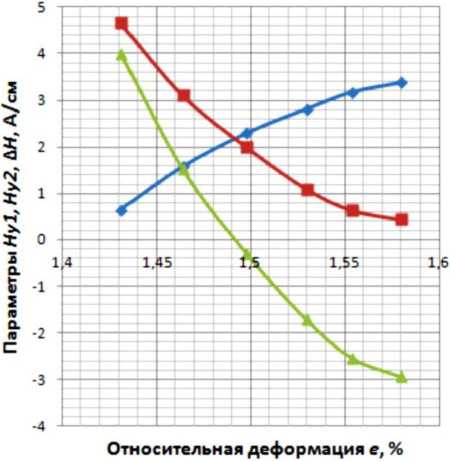
-♦-Ряд! ( Ну 1)
-»-Ряд2 ( Ну 2)
-*-РядЗ (Δ Н )
Рис. 4. Зависимость параметров Н у 1 , Н у 2 и Δ Н от относительной деформации
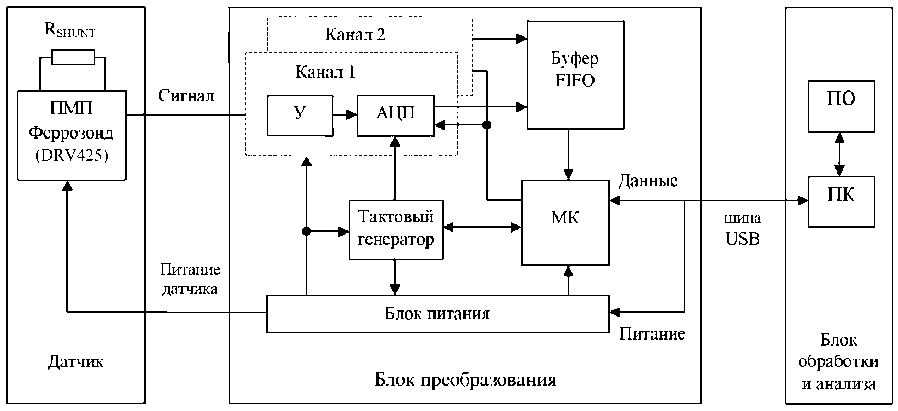
Рис. 5. Структурная схема измерительной системы
Благодаря наличию вращательного гистерезиса ферромагнитного материала происходит отставание вектора его намагниченности М от напряженности внешнего магнитного поля Не. В результате появляются две составляющие вектора М: продольная (Мх) и поперечная (Му), а ПМП фиксирует напряженность поля Ну, прямо пропорциональную величине Му. В [3] нами показано, что при установке оси чувствительности ПМП перпендикулярно магнитному полю магнитов в соответствии с рис. 2 устройство позволяет определять не только структуру материала, но и НДС ферромагнитных изделий, включая определение приложенных механических напряжений (деформаций). При этом сохраняются отмеченные ранее преимущества датчиков на постоянных магнитах, такие как простота конструкции и удобство закрепления датчика на объекте. Кроме того, установка ПМП с осью чувствительности, перпендикулярной направлению магнитного поля НУ, дает возможность существенно снизить уровень измеряемой напряженности магнитного поля и исключить промежуточные преобразования полезного сигнала ПМП. Это в свою очередь повышает достоверность контроля и упрощает измерительную аппаратуру.
В качестве примера на рис. 3 представлены зависимости параметра Н у от угла поворота α датчика структуроскопа, полученные на плоском разрывном образце стали Ст3 в состоянии поставки, подвергнутом различным уровням деформации. Предварительно образец был нагружен в условиях одноосного растяжения до пластической деформации е = 1.58 % и после снятия нагрузки подвергался многократному нагружению—разгрузке в пределах упругого цикла (от остаточной относительной деформации е о = 1.43 % до максимальной относительной деформации е м = 1.58 %). При нагружении производился отсчет параметров Н у , соответствующих различным углам α поворота датчика, на нескольких уровнях нагрузки. На рис. 3 представлены зависимости (магнитограммы)
Н у ( α ), соответствующие двум предельным значениям деформации — е 0 (ряд 1) и е м (ряд 2), причем за начало отсчета углов α принималось направление вдоль растяжения образца. Благодаря четко выраженной текстуре исследуемого образца магнитограммы представлены гладкими кривыми с несколькими экстремумами, что позволяет вычислять несколько параметров, характеризующих НДС материала изделия, например полусумму показаний 1-го и 3-го (параметр Н у 1 ), а также 2-го и 4-го (параметр Н у 2 ) экстремумов на кривых Н у ( α ). Результаты измерений показывают, что наиболее чувствительной к изменению относительной деформации е образца является разность указанных параметров Δ Н = Н у 2 – Н у 1 . Для сравнения на рис. 4 представлены зависимости указанных величин от относительной деформации: Н у 1 ( е ) — ряд 1; Н у 2 ( е ) — ряд 2; Δ Н ( е ) — ряд 3.
ОПИСАНИЕ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЫ
Приборное обеспечение описанных принципов работы датчиков на постоянных магнитах состоит из собственно датчика, блока цифрового преобразования и блока обработки, отображения и анализа (рис. 5). Датчик разрабатывается под конкретную задачу диагностики или мониторинга состояния материала изделия и реализует принципы функционирования, показанные на рис. 1 и 2. В соответствии с конкретной задачей конструктивные размеры датчика и соответствующих блоков могут меняться в достаточно широких пределах.
На рис. 6 показан вариант исполнения датчика для контроля состояния металла при исследованиях образцов стали на разрывной испытательной машине (рис. 6, а, — датчик на образце с захватами; рис. 6, б, — вид снизу на феррозонд без прокладки). Его конструкция содержит два магнита размером 35 × 12 × 6 мм. В центре между магнитами расположен ПМП, выполненный на микросхеме DRV425 ( Texas Instruments ® ), представляющий собой полностью интегральный феррозонд с максимальным регистрируемым магнитным полем ± 15 А/см. Указанный ПМП обладает стабильными и строго нормированными параметрами в широком диапазоне температур и питающих напряжений и, что особенно важно, низким и нормированным гистерезисом (некоторые варианты ПМП на основе преобразователей Холла имели выводы, покрытые магнитным материалом, что приводило к неприемлемым для описываемых применений уровням гистерезиса, зависящего к тому же от длины и формовки выводов).
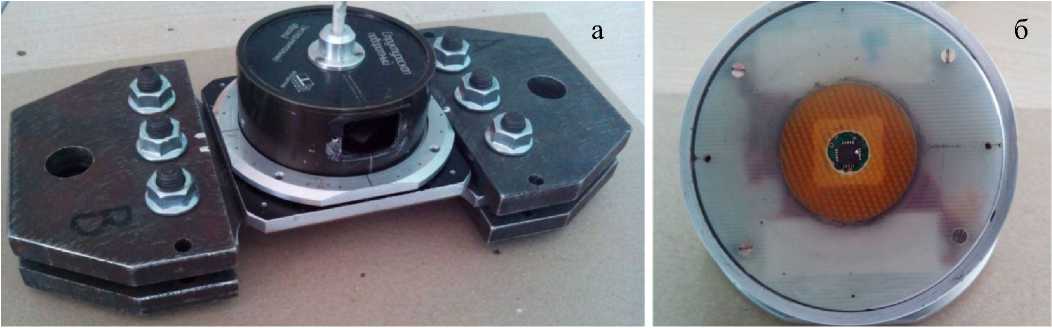
Рис. 6. Блок магнитного датчика.
а — датчик на образце с захватами; б — вид снизу на феррозонд без прокладки
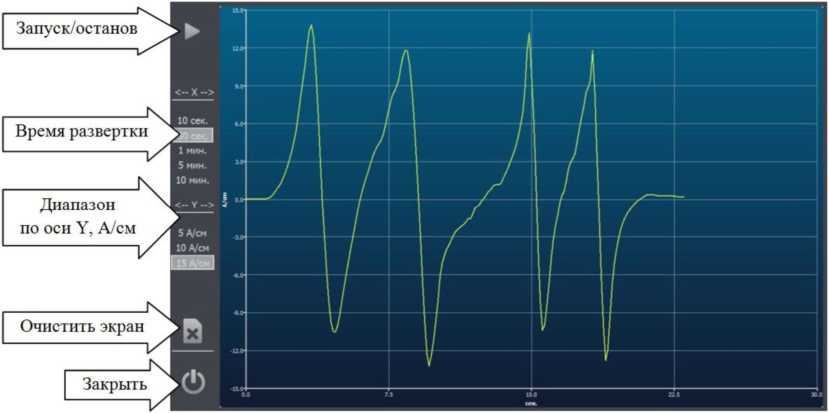
Рис. 7. Интерфейс пользователя
С выхода датчика через соединительный кабель сигнал поступает в блок преобразования. Через тот же кабель по соответствующим линиям из блока преобразования поступает питание на датчик. В блоке преобразования сигнал подвергается фильтрации и масштабированию, необходимыми для качественной оцифровки, проходит процедуру оцифровки и через буфер типа FIFO и микроконтроллер в цифровой форме по шине USB поступает в блок обработки и анализа.
В качестве основы блока преобразования для экспериментального приборного обеспечения использована плата аналого-цифрового преобразователя, позволяющая оцифровывать сигналы 24битным сигма-дельта АЦП в диапазоне частот от постоянного тока до 50 кГц. Такие широкие частотный и динамический диапазоны блока преобразования на начальном этапе экспериментальных исследований позволили оценить наличие мощных импульсных магнитных помех и магнитных полей переменного тока в условиях функционирования магнитного датчика, оценить его реакцию и возможности использования в реальных условиях эксплуатации. Однако это приводит к росту потребляемого тока питания от шины USB датчиком и блоком обработки и анализа до 150 мА, что снижает ресурс автономной работы аппаратуры в случае применения в составе приборного обеспечения планшетного компьютера. При изготовлении рабочего образца плата АЦП будет доработана. С целью снижения энергопотребления оптимальным будет переход на оцифровку сигнала с частотой 20 выборок в секунду, что в свою очередь позволит использовать старт-стоповый режим работы феррозонда DRV425 и приведет к снижению потребляемого всем устройством от шины USB тока до 25 мА.
В качестве блока обработки и анализа может быть использован любой современный компьютер, оснащенный шиной USB и установленным специализированным ПО. Для мобильных вариантов может быть использован планшетный компьютер или ноутбук. Программа получает данные из блока преобразования и отображает их в реальном времени на экране компьютера. Параллельно происходит запись данных на диск для дальнейшего детального анализа с применением другого ПО, например "WinПОС" (НПП "МЕРА"). Интерфейс пользователя в общем виде представлен на рис. 7.
При нажатии на кнопку "Запуск/останов" программа запускает или останавливает процесс получения данных. При использовании планшетного компьютера с сенсорным экраном запуск/останов процесса получения данных можно осуществить нажатием на экранную область отображения сигнала. При нажатии на кнопку "Очистить экран" происходит очистка буфера, а процесс получения информации и ее отображения продолжается с нуля. Пользователь имеет возможность выбрать время развертки (10, 30 с, 1, 5, 10 мин) и диапазон параметра по оси Y (5, 10, 15 А/см). При выборе времени развертки и диапазона данные, имеющиеся на экране, автоматически масштабируются.
Описанная приборная реализация предлагаемой аппаратуры позволяет провести исследования по влиянию на показания прибора режимов поворота / вращения датчика на поверхности образцов различных материалов, исследовать угловые диаграммы на образцах, подвергнутых деформации, а также выявить возможность получения информации о структуре материала при линейном сканировании датчика на образцах крупнокристаллических материалов (например, вдоль листового проката электротехнической стали).
ЗАКЛЮЧЕНИЕ
Разработан и изготовлен прибор с датчиком на постоянных магнитах, позволяющий измерять магнитные параметры над поверхностью контролируемых объектов по различным направлениям с использованием вращательного перемагничивания ферромагнитного материала. Аппаратура дает возможность определять структуру, механические свойства и НДС изделий при наличии корреляционных связей между показаниями прибора и контролируемыми параметрами. Датчик на постоянных магнитах позволяет расширить функциональные возможности прибора, упростить конструктивные и схемные решения аппаратуры, повысить достоверность контроля и диагностики объектов из ферромагнитных материалов.
Список литературы Датчики на постоянных магнитах с использованием вращательного перемагничивания материала
- Горкунов Э.С., Захаров В.А. Коэрцитиметры с приставными магнитными устройствами (обзор)//Дефектоскопия. 1995. № 8. С. 69-88.
- Захаров В.А., Молин С.М., Леньков С.В., Колясев В.А. Структуроскопы на постоянных магнитах//Инженерная физика. 2016. № 12. С. 68-73.
- Захаров В.А., Молин С.М., Леньков С.В., Колясев В.А. Магнитный структуроскоп. Патент РФ на полезную модель № 173646, 04.09.2017.
