Действие подвижной нагрузки на ребристую цилиндрическую оболочку с упругим заполнителем

Автор: Н. К. Эсанов, Ж. М. Саипназаров
Журнал: Современные инновации, системы и технологии.
Рубрика: Машиностроение, металлургия и материаловедение
Статья в выпуске: 4 (4), 2024 года.
Бесплатный доступ
В работе рассматривается действие подвижной нагрузки на ребристую цилиндрическую оболочку с упругим заполнителем. Найдено решение задачи о действии подвижных нагрузок на бесконечно длинную цилиндрическую оболочку, подкрепленную по наружной поверхности продольными ребрами жесткости и содержащую внутри упругий инерционный заполнитель. Учитывается дискретность расположения ребер путем записи для них уравнений движения балок с последующим удовлетворением условий сопряжения. Показано влияние числа и жесткости ребер на характер распределения перемещений оболочки и контактного давления на границе заполнителя.
Подвижной нагрузки, оболочка, упругий заполнитель, ребро, интегральный преобразования.
Короткий адрес: https://sciup.org/14131317
IDR: 14131317 | DOI: 10.47813/2782-2818-2024-4-4-0301-0309
Текст статьи Действие подвижной нагрузки на ребристую цилиндрическую оболочку с упругим заполнителем
DOI:
Собственные колебания и распространение свободных волн в цилиндрических оболочках, взаимодействующих с жидкостью, исследовались многими авторами, в частности в работах [1, 2, 3]. При этом рассматривались осесимметричные и не осесимметричные задачи, применялись различные модели для жидкости и оболочки. Вопрос о действии подвижной волны давления на цилиндрическую оболочку, заполненную или окруженную жидкостью, менее изучен, причем было рассмотрено только осесимметричное нагружение [4, 5].
В данном работе с помощью интегрального преобразования по осевой координате и рядов Фурье по углу получено решение задачи о движении вдоль бесконечно длинной цилиндрической оболочки, взаимодействующей с идеальной сжимаемой жидкостью нормального давления, произвольного по длине и окружности, но неизменного во времени профиля [6, 7]. Скорость движения нагрузки постоянна, и в статье она рассматривается для случая, когда она меньше скорости звука в жидкости [8,9].
Жидкость заполняет полость между оболочкой радиуса а и соосной с ней жесткой цилиндрической стенкой радиуса b . В статье с использованием полученных результатов в работе [10], найдено решение задачи о действии подвижных нагрузок на бесконечно длинную цилиндрическую оболочку, подкрепленную по наружной поверхности продольными ребрами жесткости и содержащую внутри упругий инерционный заполнитель.
МАТЕРИАЛЫ И МЕТОДЫ
Предполагается, что движущаяся нагрузка передается на оболочку только через ребра, вне ребер нагружение отсутствует. Учитывается дискретность расположения ребер путем записи для них уравнений движения балок с последующим удовлетворением условий сопряжения. Показано влияние числа и жесткости ребер на характер распределения перемещений оболочки и контактного давления на границе заполнителя.
Движение оболочки описывается классическими уравнениями, основанными на гипотезе Кирхгофа-Лява, для заполнителя используются динамические уравнения теории упругости [11]. Движение ребер жесткости подчиняется уравнениям теории балок d4Vi.3
E8kIk~^4 + РЗк?к~^Т = pSk(x,t) - q0k(x,t),(1)
УЛUL где qok давление со стороны оболочки на погонную единицу длины к -го ребра; р§к -интенсивность нормальной нагрузки на k-ю балку; l – число ребер жесткости.
Граничные условия для заполнителя при скользящем контакте с оболочкой имеют вид г = аагх = агв = 0; arr = —qc; иг = ш. (2)
Внутренняя поверхности заполнителя принимается свободной от напряжений, тогда г = аагх = огв = arr = 0 . (3)
Принимая, что контакт между ребрами и оболочкой происходит по прямым линиям (осям балок), запишем следующие условия сопряжения.
-
а) Внешняя нагрузка на оболочку равна сумме давлений, передаваемых через каждое ребро:
Р (х, 0, t) = 2 ^=1 q0 k (x,t)8(0 — 0 k ) ; (4)
-
б) В местах контакта (0 — 0 k ) перемещения оболочки равны прогибам балок, причем, поскольку положительными считаются перемещения, направленные в сторону выпуклости оболочки, то эти условия имеют вид
ш(х, 0 k , t) = —y k (x, ^)(k = 1,...,l). (5)
Для постоянной скорости движения нагрузок и установившегося процесса решение задачи ищется в подвижной системе координат. Применяя преобразование Фурье по q и раскладывая все заданные искомые величины в ряды Фурье по 0 вводим по формулам потенциальные функции, удовлетворяющие уравнениям [12]. Тогда при скоростях движения нагрузок, меньших скоростей распространения волн сдвига в заполнителе, коэффициенты Фурье для перемещений запишутся в виде
-
и °п (г,%) = i ^ Kn(m i r)An + i ^ In(m i r)Bn + m 2i Kn(ms i r)Cn + m 2i In(ms i r)Dn
и ° вп(г,^) = i^^ n (m i r)A n + i^I n (m i r)B n + m 2 K n (m si r)C n + m 2i I n (m si r)D n —
— [ n K n (m si r) — m si K n + i (m si r)\E n — [ n I n (m si r) — m si I n+i (m si r)]S n ;
u 0 n (r,O) = [rKn(m i r) - m i Kn +i (m i r)]An + [^I n (m i r) - m i In +i (m i r)]sn -
-^^ n^si1'' ) — m si K n+i (m si r)] Cn
- 1 a [r I n (m si r') - m si I n+i (m si r)] Dn + + ^K n (ms i r)En + ^ In(m si r)Sn;
ml m f c2. 1 c\ 1
m i = ~m si = —m = (1- ^) 2 ; m s = (1- 2 )2>-
РЕЗУЛЬТАТЫ И ОБСУЖДЕНИЕ
Аналогичным образом с помощью формул (1)-(5) находится гармоника трансформант напряжений в заполнителе. Удовлетворяя преобразованным граничным условиям (2) и (3), выразим функции An(O).. .Sn(O) через коэффициенты Фурье радиального перемещения оболочки:
ы° ‘.■ „‘,
{A n . ..S n ) = detn \\ aij \\ {A n . .. Sn)
При этом функции An'(a). ..Sn'(O) вычисляются по формулам detn\a[j У и находятся по формулам элементов asj этих формул, положив t3 = 0. А элементы a6j вычисляются по формулам a6i = ns3 - mO; a62 = n + mOs6; a63 = ns9 - msO; a64 = -n- msOsi2; a65 = n; a66 = n.
Подставляем найденные функции в формулу (6) для ОуГП, а затем полученное выражение рассматриваем при условии ^Гг.п = -qC.n (r = а~) . Тогда находим связь между реакцией заполнителя и рациональными перемещениями оболочки в виде fi(n,O,c)
g(n,f,c) _ detnWatjW;
a i (n,O, c) = {[(1 +m2 s )2 + 2n(n - 1)]s3 + 2mO)A6 i +
+{[(1 + m 2^2 + 2n(n - 1)]s6 + 2mO)A62 +
+2mSO2{[1 + n^]s9+A7}A63-m^O2
-
-2m^\1 + n^\s12+A-]Au-s m2O2m
-
-2n[(n - 1)s9 - msO]A6S + 2n[(n - 1)si2 - msO]A66 .(7)
Здесь A6j алгебраические дополнения элементов определителей detn\a[j\. В случае сплошного заполнителя функция fi(n, О, с) вычисляется по формуле (7). Подставляя (6) в преобразованные уравнения движения оболочки, получаем систему алгебраических уравнений относительно u°i,v0,M0 , из которой искомые величины выражаются через коэффициент Фурье трансформант внешнего давления на оболочку. В частности, для трансформанты радиального перемещения получаем
“°W=^^ = 0^cos(ne-), (8)
2ku г ($,П,С)
где функция F(%,n,c^ вычисляется по формулам (7). В (8) коэффициенты Фурье трансформант внешнего давления на оболочку являются неизвестными и должны быть определены с помощью условий сопряжения ребер с оболочкой. Для этого, применяя в подвижной системе координат преобразование Фурье к (4), (6), разложим правую часть (5) в ряды Фурье по в , тогда в пространстве изображений будем иметь
P°(S,e) = ~^'=°(^k=1qok(S)aпk)cos(nв).(9)
Здесь апк коэффициенты Фурье функции 8(в — вк). С учетом (8) формула (7) принимает вид
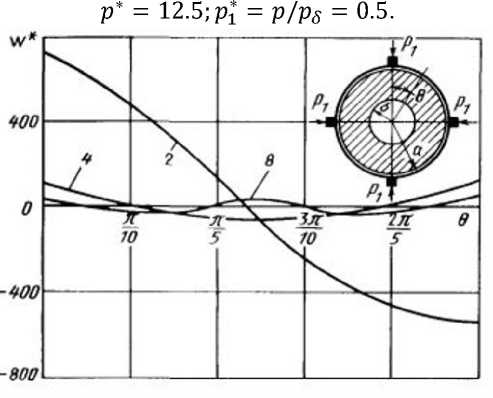
° 1-Е у' fyi °С2?№
^ (Se) 5kGLn=°\.Lkn=i Подставляя (10) в преобразованные условия (6), получаем для нахождения q^ систему алгебраических уравнений эки г (^ ,П,С) Разрешая эту систему относительно q°k, выражаем трансформанты. Для реакции стороны оболочки через прогибы ребер получаем зависимости вида q°k = fk(yl.....у?)(к = 1.....Г) .(12) Конкретный вид этой зависимости определяется числом ребер и здесь не описывается. Подставляя (12) в преобразованные уравнения движения (5), получаем систему уравнений для определения трансформант прогибов балок S2 [Г-з^-;^ [РЫЖ.....у;)](к = 1......О,( где ук = ук°/h; cik = 3c2Psk/2/GSk . Из системы (13) находим трансформанты прогибов балок через нагрузки на каждую из них и жесткостные параметры ребер, оболочки и заполнителя. Формально указанные зависимости можно записать в виде y'k = ^k(Psi,...,Psi)(k = 1,...,l) (14) Подставляя (14) в (12), находим трансформанты давления каждой из балок на оболочку, после чего из (8) определяются прогибы оболочки. Затем с использованием (7) определяются компонент напряженно-деформированного состояния заполнителя. Алгоритм получения окончательного решения существенно упрощается, если принять, что материал и геометрические характеристики ребер одинаковы (Е§к = Eg; р$к = Рз; Ik = 1';^к = F), сами ребра расположены на одинакоюм расстоянии друг от друга, а нагрузки, движущиеся вдоль ребер, имеют одинаковую интенсивность и один и тот же закон распределения по длине. Аналогичные формулы можно записать для определения напряженно-деформированного состояния во внутренних точках заполнителя. Расчеты проведены для следующих значений безразмерных параметров: к = 0.02; v = v3 = vc = 0.3; у1 = 0.1; Рисунок 1. Изменение прогибов оболочки по окружности для различного числа ребер жесткости. Figure 1. Change in shell deflection around the circumference for different numbers of stiffening ribs. На рисунке 1 показано распределение прогибов оболочки по окружности в сечении ^ = 0 для у = 250; а4// = 106; a2F/I = 700 в случае двух, четырех и восьми ребер. Суммарная нагрузка и ребра при любом их числе остается постоянной, как и жесткость ребер. Число ребер I, их геометрические характеристики, а также относительная упругость заполнителя варьировались. ЗАКЛЮЧЕНИЕ В работе разработана методика расчета и алгоритм для определения перемещения и напряжений оболочки с упругим заполнителем и ребром. Эти процессы позволяют изучить работу оболочки под воздействием различных нагрузок, что имеет важное значение для обеспечения её прочности и долговечности. Всесторонний анализ условий влияния на жёсткость и устойчивость оболочки создаёт возможность значительно улучшить результаты расчётов. Эти результаты могут быть использованы для дальнейших исследований и разработок в области строительной механики и материаловедения.