Design of (FPID) controller for Automatic Voltage Regulator using Differential Evolution Algorithm
 controller for Automatic Voltage Regulator using Differential Evolution Algorithm")
Author: Nasir Ahmad Alawad, Nora Ghani Rahman
Journal: International Journal of Modern Education and Computer Science @ijmecs
Article in issue: 12 vol.11, 2019.
Free access
This article presents Differential Evolution (DE) to determine optimum fractional proportional-integral-derivative (FPID) controller parameters for model decrease of an automatic voltage controller (AVR) system. The suggested strategy is a straightforward yet efficient algorithm with balanced capacities for exploration and exploitation to efficiently search for space alternatives to find the best outcome. The algorithm's simplicity offers quick and high-quality tuning of optimum parameters for the FPID controller. A time domain performance index is used to validate the suggested DE-FPID controller. The proposed technique was discovered productive and hearty in improving the transient response of AVR framework contrasted with the PID controllers based - Ziegler-Nichols (ZN), FPID based - Invasive Weed Optimization (IWO),FPID based-Sine-Cosine algorithmn (SCA) tuning strategies.
Automatic voltage regulator, DE , IWO, SCA, BB algorithms, MATLAB.
Short address: https://sciup.org/15017150
IDR: 15017150 | DOI: 10.5815/ijmecs.2019.12.03
Text of the scientific article Design of (FPID) controller for Automatic Voltage Regulator using Differential Evolution Algorithm
Published Online December 2019 in MECS DOI: 10.5815/ijmecs.2019.12.03
-
I. Introduction
Fractional calculus in the last two centuries has been quite common research area in engineering study, although it has been recognized for about 300 years. The non-integer calculus begins with the 1965 [1].
Many methods were pro-positioned in the literature to design FOPID controller. You can classify these approaches into two groups: analytical methods and heuristic techniques. The parameters of the FOPID controller are tuned in the analytical framework by minimizing a nonlinear objective function based on the specific possibilities imposed by the developers.
To the extent numerous scholars have examined the heuristic procedures, rule-based strategies and transformative calculation based systems, Evolutionary calculations, for example, Genetic Algorithm (GA), Particle Swarm Optimization (PSO) and Electromagnetism, for example, algorithm (EM) are likewise used to plan FOPID controllers[2,3],in the literature provided the first research on the fractional order proportional-integral-derivative (FOPID) controller.
Unlike the classical PID[2] is proposing two extra parameters called π, μ for the fractional PID. Researchers have indicated that in terms of certain characteristics such as flexibility and stability, these two parameters reinforce the hand of customers.
Works on fractional controllers have been increasing day by day[4,5]. [6] proposed a solid FOPID controller for wind turbine generators. [7] suggested the design of the fractional order controller based on the technique of particle swarm optimization (PSO). Genetic algorithms have been used to design FOPID controllers by recasting the issue to a issue of optimization[8]. Different tuning techniques, such as altered method Ziegler-Nichols, have also been used by researchers to design a FOPID controller[9]. On the other side, there is a comprehensive debate about the efficiency of FOPID controllers intended by ABC Algorithm for tuning the PID controllers of the fractional order[10]. An important entity for the operation of the power system[11] is the automatic voltage regulator (AVR). Therefore, studying its modeling is essential to observe the conduct and efficiency of AVR. Because AVR is a complex system with a greater feature of order transfer, studying it is tedious. This article addressed and enforced the Biogeography-based Optimization (BBO) Model Reduction Scheme for this system. Differential Evolution(DE) has become increasingly common recently as a simple and impressive plot for global optimization over continuous spaces. In the current job, the FOPID controller system was screened using the DE algorithm and compared with others optimization methods,like(IWO,SCA).
-
II. AVR Modeling
The standards of AVR is to keep up the generator terminal voltage extents at the predetermined level. AVR framework comprises of four fundamental parts there are amplifer, exciter, generator and sensors. The numerical model can be considered linear and taking into account the time constant and neglecting the saturation or other nonlinearities. Fig.1 shows AVR model .
The AVR loop ensures that the terminal voltage in the power system is constant and stable. A voltage level sensor continually senses a terminal voltage. To compare with a DC reference signal in the comparator, it is rectified and smoothed. The error voltage from the comparator output is then amplified in an amplifier. Lastly, this signal is used to control the exciter winding of the generator field.
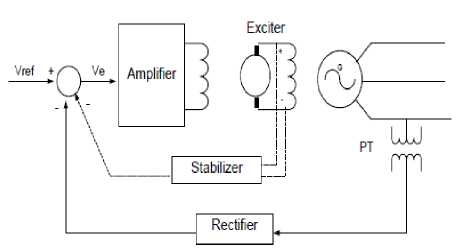
Fig.1. shows AVR model [12]
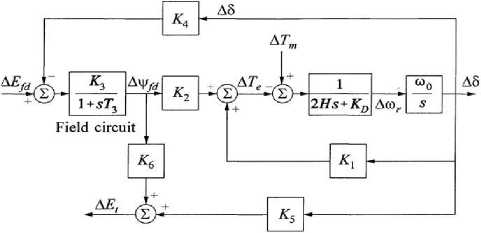
Fig.2. The Generator model[14]
D. Sensor model
The voltage is perceived through a possible electrical device and, in one kind, it's corrected through a bridge
rectifier. The device is modeled by a straightforward first
The AVR model consists of many elements, which are:-
order transfer function, constant can be[12,13] :-
Hs(s)
given by a gain and a time
K s
1 + T s s
A. Amplifier model
The excitation system is electronic equipment could also be a magnetic , rotating, or modern electronic . This equipment is described by a gain Ka and a time constant Ta therefore the transfer function is[12,13];-
G a ( s ) =
1 + TaS
Where Ka = [10, 400], T = [0.02, 0.1] sec
B. Exciter model
There is a spread of various excitation varieties. However, modern excitation systems use ac power supply through solid-state rectifiers like SCR. within the simplest type, the transfer function of a contemporary exciter is also described by time constant Te and a gain Ke. [12,13]:-
G e ( S ) =
K e
1 + T e s
Where Ke = [0.8, 1], T = [0.5, 1.0] sec.
C. Generator model
For AVR, we've thought of a simplified linearized model as shown in Fig.2 The transfer function of generator model will be expressed as[12,14]
Go, ( s ) =
2 HK з K 6 S 2 + K з K 6 K d S + K 3 ® o ( K 1 K 6 - K 2 K 5)
2 HK 3 S 1 + (2 Н + K d T , ) S 2 + ( K d + ® о Т з ) S + ® o ( K , - K 2 K 3 K 4 )
Where Ks = [0.1 1] and T = [0.01 0.7].
The open-loop transfer function of AVR, can be represented as [12,13]:-
G avr = G a * G e * G ol (5)
Or can be written as:- a3S^ + aS + a0AVR = b5S5 + b4S4 + b3S3 + b^S2 + bS + b0 (6)
Where a0 = KaK®(K1K6 -K2K5)
a1 = KOKK6 KD
b5 = 2 Ht^t,b4 = 2 HT3t6 + 2 HT3t„ + 2 HTeTa + KDT3TeTa b 3 = 2 HT3 + 2 Нте + KDT3Te + 2 HTa + KDT3Ta + KDTeTa b2 = 2 Н + KDT3 + KDTe + ®oT3Te + KDTa + ®oT3Ta + ®oTeK 1Ta — ®oTeK2K 3K4Ta b1 = KD + ®oT3 + ®oK1Te — ®oTeK 2 K3 K4 + ®oTeK1 + ®oTaK 2 K3 K4 bo = ®o (K1 - K 2 K3 K4)
Refer to ref. [ 14 ], Where
^ 1 =1.591, K 2 =1.5, K 3 =0.333, K4=1.8, K 5 =0.12, K6 =0.3, 7 3 =1.91, Н =3, KD=0, to0=377.
The open-loop transfers function of AVR as:
____________________ 5.994 S 2 + 825.2 ___________________
AVR = 0.573 S 5 + 7.176 S 4 + 51.06 S 3 + 451.1 S 2 + 876.6 S + 260.8
Equation(7) shows the open-loop transfer function of AVR, it's necessary to managing closed loop to measure the dynamic transient response parameters (max overshot, settling and rise times, etc), so it should be insert the feedback activity sensor.
Fig.3 demonstrates how the AVR system sections are arranged as a closed loop. The sensor continually detects terminal voltage Vt(s) of the generator and compares it with the necessary reference voltage Vref(s). The amplifier amplifies the difference between the reference and the sensed terminal voltages (e.g. error voltage) and is used by the exciter to excite the generator.
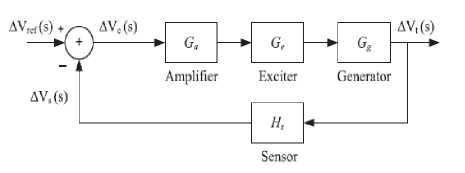
Fig.3. simplified AVR block diagram
Finally, the closed-loop transfer function (after connecting the sensor feedback element) is:-
V t ( s ) G AVR
V ref ( ^ ) 1 + G AVR H s (8)
V ( s ) _________________ 0.0599 s 3 + 5.994 s 2 + 8.252 s + 825.2 _________________
V„ ( ss ) = 0.00573 s 6 + 0.644 s 5 + 7.686 s 4 + 55.571 s 3 + 465.86 s 2 + 879.208 s + 1086 (9)
-
III. AVR model Reduction
Model order reduction (MOR) primarily retains the foremost necessary properties throughout modelling whereas rejecting unwanted or slighter parameters. The dimension massive of huge of enormous} scale system is thus large that standard techniques of modelling, simulation, control, analysis and computation fail to supply possible solutions with affordable machine efforts. Thus, the reduction of dimension of higher-order system is a straightforward tool in order that the higher than mentioned needs will be met with lesser complexness and value as a result of complexness of a system will increase with system order. In literature, mathematical approaches/algorithms to cut back the order of a higher-order system diagrammatic mathematically however applications area unit least [15,16]. The transfer function of AVR as apper in equation(9) is sixth order , so we've tried to approximate it to second order. Ref[17],shows several ways to scale back the order of AVR, classical(Truncation, Routh alpha beta approximation, Time moment matching, Pade approximation) and a computer power-assisted ways, like(PSO), big bang big Crunch(BBC),Genetic Algorithm(GA).
BBO algorithm for reducing order of AVR
It presents a biogeography-based optimization (BBO) rule to cut back model of AVR. Biogeography is that the science of the geographical distribution of biological species. The models of biological science make a case for however a organisms arises, immigrate from an surroundings to a different and gets eliminated. The planned rule has some common options with alternative population-based algorithms. Like GA & PSO, BBO additionally shares information amongst the solutions; however BBO doesn't involve in reproduction like GA. The BBO rule is principally supported two steps: migration and mutation. The BBO has some smart options in aiming to the worldwide minimum compared to alternative biological process algorithms [18].
There is necessary reason to think about BBO as a separate optimization rule, which is as a result of the biological science roots of BBO open up several avenues for extensions and modifications that might rather be unobtainable to the scientist. The BBO rule may be a easy, strong and novel international optimization methodology. BBO has sensible optimization performance because of its migration and mutation operators [19]. The BBO rule is especially supported two steps: migration and mutation.
Migration
In BBO formula, a population is chosen as an answer. This answer will represent as a vector of real number that every real number could be a SIV(suitability index variable) in BBO formula . The fitness of every answer will be calculated with its objective operate. This fitness is that the same HIS(habitat quality index) in BBO formula. In BBO answers with high HSI represents a decent answer and answer with low HSI represents a foul solution.
Mutation
Sudden changes in climate of one environs or alternative incidents can cause the fast changes in HSI of that environs . In BBO algorithmic program, this case are often model within the sort of fast changes in price of SIV. For a lot of details, see Ref[20 ]. The method of the BBO algorithmic program for reducing model order of AVR was enforced in MATLAB software package. For this case study, generation count limit=200, population size=50, proplem dimension=5, mutation probability=0.06, number of elites=2, after exploitation improvement program, the reduced transfer perform of AVR is:-
_ 0.0003217 s + 2.401
Gr = -------5----------------- r 1.277 s2 + 2.386 s + 3.171
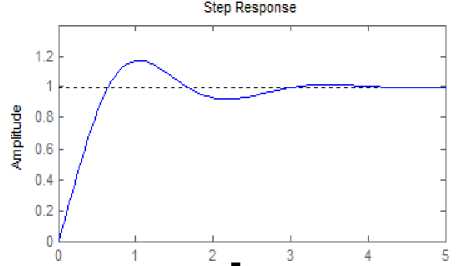
There are no large differences between original and reduced order systems, where both have the same overshot(Mp%),settling time(Ts) , rise time(Tr),peak time(Tp) and steady-state error(Ess),Fig.4 shows transient response of original and reduced order systems. For simplicity in design and analysis, equation(10) can be used instead of equation(9).
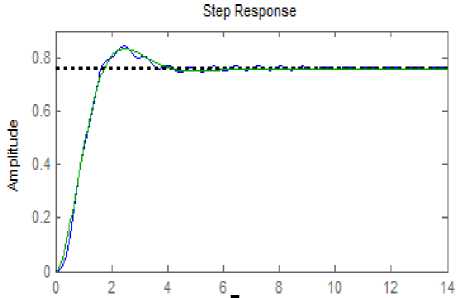
Fig.4. shows step response of original and reduced order system
As seen from Fig. 4 the transient specifications are almost identical, where the blue is original system and the green reduced system. The transient data parameters are calculated by using Matlab package. Table 1. Shows comparison parameters between original and reduced system.
Table 1. Transient response parameters comparison
|
System |
Mp% |
Ts(sec) |
Tp(sec) |
Tr(sec) |
Ess |
|
Original |
10.9 |
4.5 |
2.42 |
1.03 |
0 |
|
Reduced |
9.9 |
3.76 |
2.46 |
1.17 |
0.757 |
-
IV. FPID Controller
The FOPID controller comprises of two extra parameters called n and ц which define integration and differentiation orders unlike the conventional PID. These two parameters provide the controller with flexibility and durability. Four distinct objective features are used to examine the controller's efficiency: ISE, ITSE, IAE and ITAE.Thus, in equations.(11)-(14) the objective features used in this research phase are provided:
to
ISE = J e 2( t) d (t)(11)
0 to
ITSE = J t .e 2( t) d (t)
0 to
IAE = Je (t)dt.(13)
ITAE = j t . e ( t ) dt .
The continuous transfer function of FOPID is also obtained through Laplace transform as:
C ( 5 ) = Kp + Ki + Kds ц s л
Where Kp is proportional constant ,Ki is integral constant, and Kd is derivative constant while fractional powers (X and ц) of the integral and derivative parts respectively add to the better flexibility of Fractional PID controller.
Firstly, the tuning is done to obtain the parameters of PID controller Kp, Ki and Kd by Ziegler-Nichols(Z-N) ,by using closed-loop control system with Kp only and change it until reach sustained oscillation, after that read the critical gain(Kcr) and ultimate frequency(Pcr),return to (Z-N) table and calculate, Kp=4.22,Ki=5.31, and Kd=0.84.
Fig.5 shows the transient response of Gr with Z-N PID controller,,Mp=17.1%,Ts=2.84sec,Tr=0.493sec,Tp=1.03s ec and Ess=0. Different tuning methods have been used to tune fractional order PID controller, but in this paper, it is used Differential Evolution (DE) algorithm.
Fg.5. shows step response of reduced order system with PID controller
DE-based tuning FPID controller
DE algorithm is a stochastic method of optimization that minimizes an objective function that, while incorporating constraints, can model the objectives of the problem. DE is a fairly fresh method for optimization. It is very simple to implement, needs little or no parameter tuning and has been implemented effectively in many issues domain The algorithm primarily has three benefits; discovering the real global minimum irrespective of original parameter values, quick convergence, and using a few control parameters[21]; Being simple, quick, easy to use, easy to adapt for integer and discrete optimization, quite efficient in the optimization of nonlinear constraints including penalty functions and useful for optimizing multi-modal search spaces are the other important features of DE [22,23].
The DE algorithm is a population-based algorithm that uses comparable operators like genetic algorithms; crossover, mutation, and choice. In building better alternatives, the primary distinction is that genetic algorithms depend on crossover while DE focuses on mutation operation. This primary procedure is based on variations in population between randomly sampled pairs of alternatives. The rule uses mutation operation as a groundwork mechanism and choice operation to direct the search toward the possible regions within the search space. The DE rule additionally uses a non-uniform crossover that may take DE vector parameters from one parent a lot of typically than it will from others. By using the elements of the present population members to construct trial vectors, the recombination (crossover) operator expeditiously shuffles data regarding successful combinations, enabling the look for a much better answer area. the most steps of the de rule ar, initialization, Evaluation, Repeat, Mutation, Recombination, Evaluation ,Selection, till (termination criteria are met).The block-diagram of DE is shown in Fig.6
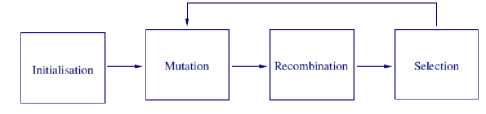
Fig.6. shows the block-diagram of DE procedures
It should be observed that the unified parameter settings are as follows, except for unique instructions. Population size pop size (NP)= 10, reduced bound scaling factor F1=0.2, upper bound F2=0.8, crossover likelihood Cr=0.2. The technique of mutation utilizes "DE / Rand/1" and 150 iterations maximum. If the ideal theoretical solution is discovered, the program will end. Equ(11-14) was used as the four performance index. The lower bound of decision variables[ 00000]and the upper bound of decision variables[ 10 10 1.5 10 1.5].Matlab package can be used to execute DE procedures of fig.6.untill reach the maximum iterations. Table 2. indicates the FPID controller values depending on the performance index.
Table 2. Parameters values of FPID controller with different performance index(P.I) using DE algorithm
There are several strategies obtainable in literature to approximate the fractional order. a number of the wide used frequency domain approaches area unit Carlson's methodology, Matsuda's methodology, Oustaloup's methodology and Chareff 's methodology, during this paper the crone approximation methodology given in [24] is employed. The designed FOPID controller is approximated by oustaloup filter. The fractional derivative and integrals of FOPID controller have been approximated by N=5 and filter frequency [Wl,Wh] =[0.001,1000].The Mat lab program is:- clear clc;
nn=[0.0003217 2.401];
dd=[1.277 2.386 3.171];
g=tf(nn,dd);
C=fracpid(Kp,Ki, λ ,Kd, µ ); f=series(g,C);
sysc=feedback(f,1);
syscint=oustapp(sysc,0.001,1000,5);
t=0:0.01:5;
step(syscint,g,t) s=stepinfo(syscint)
Table 3. shows transient parameters with different ( P.I), after executing the matlab program.
Table 3.Transient parameters values of FPID controller with different performance index using DE algorithm
|
P.I |
Ts(sec) |
Tr(sec) |
Mp% |
Ess |
|
ISE |
22.9325 |
3.9697e-04 |
0.9898 |
0 |
|
ITSE |
1.0527 |
0.2594 |
0.0495 |
0 |
|
IAE |
0.9345 |
0.3010 |
0.0187 |
0 |
|
ITAE |
0.4976 |
0.2884 |
0.0922 |
0 |
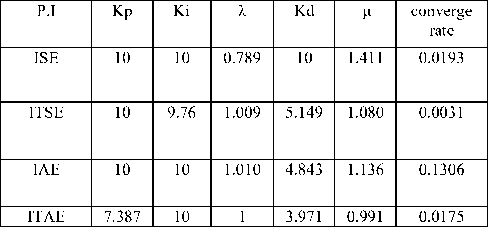
For comparison DE algorithm with other optimization techniques (IWO),(SCA), and because the paper size limitation, all these techniques are not considered in detail, so that ,for (IWO) refer to Ref[25],and let the parameters of algorithm are:-
Varmin=[0 0 0 0 0],Varmax=[ 10 10 1.5 10 1.5], maximum number of iterations=150, initial population size=2,maximum population size=10,minimum number of seeds=0,maximum number of seeds=5, variance reduction exponent=2,initial value of standard deviation=0.5 and final value of standard deviation=0.001.Table 4. indicates the FPID controller values depending on the performance index.
Table 4. Parameters values of FPID controller with different performance index using IWO algorithm
|
P.I |
Kp |
Ki |
λ |
Kd |
µ |
converge rate |
|
ISE |
10 |
10 |
0.789 |
10 |
1.412 |
0.0193 |
|
ITSE |
10 |
10 |
1.001 |
6.477 |
1.020 |
0.0032 |
|
IAE |
9.623 |
10 |
1.014 |
4.480 |
1.126 |
0.1308 |
|
ITAE |
5.136 |
8.66 |
1 |
3.336 |
0.875 |
0.0427 |
Table 5. shows transient parameters with different performance index, after executing the matlab program
Table 5. Transient parameters values of FPID controller with different performance index using IWO algorithm
|
Performance index |
Ts(sec) |
Tr(sec) |
Mp% |
Ess |
|
ISE |
6.7437 |
2.0701e-07 |
1.0031 |
0 |
|
ITSE |
1.5706 |
0.2058 |
0 |
0 |
|
IAE |
0.8068 |
0.3043 |
0.0026 |
0 |
|
ITAE |
0.8176 |
0.3259 |
2.1734 |
0 |
Again ,when compared with(SCA) algorithm, refer to Ref[26], and let the parameters of algorithm are:-
Table 6. Parameters values of FPID controller with different performance index using SCA algorithm
|
P.I |
Kp |
Ki |
λ |
Kd |
µ |
converge rate |
|
ISE |
10 |
10 |
0.845 |
10 |
1.421 |
0.019606 |
|
ITSE |
9.620 |
10 |
1.045 |
7.776 |
0.827 |
0.004288 |
|
IAE |
7.698 |
9.88 |
1 |
4.535 |
0.960 |
0.13915 |
|
ITAE |
9.402 |
9.78 |
1.003 |
4.358 |
0.882 |
0.089436 |
Table 7. shows transient parameters with different performance index, after executing the matlab program
Table 7. Transient parameters values of FPID controller with different performance index using SCA algorithm
|
Performance index |
Ts(sec) |
Tr(sec) |
Mp% |
Ess |
|
ISE |
17.5373 |
2.5549e-04 |
1.9174 |
0 |
|
ITSE |
1.8569 |
0.1835 |
1.8087 |
0 |
|
IAE |
0.4577 |
0.2582 |
0.1638 |
0 |
|
ITAE |
1.5877 |
0.2761 |
1.9187 |
0 |
-
V. Results Comparison And Discussion
As seen from Tables 2.,4.,6.,the least values of convergence rate appears with (ITSE) performance index, DE algorithm gives optimum minimization with rate(0.0031) .Fig.7 shows the transient response of all optimization algorithms (DE,IWO,SCA) and Z-N method.
When compared transient parameters (Ts, Tr, Mp%) values of FPID controllers, The DE method appears very speed response because it gives minimum(Ts),While the Mp% approaches to zero. The ZN-PID appears bad response, when compared with DE,IWO and SCA,because gives sluggish response with maximum Mp% and needs more tuning. Table 8. Shows the comparison between all optimization methods for designing PID controller.
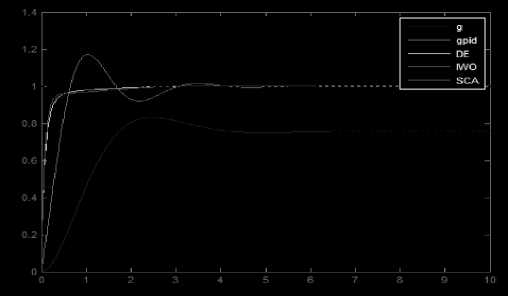
Fig.7. shows transient response of all optimizations methods
Table 8. Comparison between all optimizations methods for PID controller
|
Optimization method |
Ts(sec) |
Tr(sec) |
Mp% |
Ess |
|
ZN-PID |
2.84 |
0.493 |
17.1 |
0 |
|
IWO-PID |
1.5706 |
0.2058 |
0 |
0 |
|
SCA-PID |
1.8569 |
0.1835 |
1.8087 |
0 |
|
DE-PID |
1.0527 |
0.2594 |
0.0495 |
0 |
-
VI. Conclusions
In this article an AVR scheme with automatic PID controller was optimally tuned using Differential Evolution (DE) algorithm and contrasted with (IWO, SCA) algorithms for proportional, integral and derivative gains. Different time domain requirements are regarded for this issue, such as maximum peak overshoot, settling time, rise time, and so on. In an attempt to study the impact of the performance index on the requirements of the time domain, the fitness function is provided distinct performances. Software simulation of the system with different fitness function revealed that the time domain specification of the DE algorithm gives the best values, especially the response speed and this situation is very important for AVR ,also there is no vibration or chattering at the steady state part ,generally (ITSE) performance index shows better compared with others indexes(ISE,IAE,,ITAE).In addition, the proposed study depicts that, the performance of DE is better than classical tuning of PID structure, using the famous Z-N procedures. This work can be expended to take nonlinear AVR model in future work, also using some comparison with intelligent (fuzzy,Neural Network) controllers.
Acknowledgment
The authors would like to thank Mustansiriyah University ( Baghdad – Iraq for its support in the present work.
References Design of (FPID) controller for Automatic Voltage Regulator using Differential Evolution Algorithm
- J. T. Machado, A. M. Galhano, J. J. Trujillo, “On development offractional calculus during the last fifty years”, Scientometrics, vol. 98,no. 1, pp. 577–582, 2014. DOI: 10.1007/ s11192-013-1032-6.
- I. Podlubny, L. Dorcak, I. Kostial, “On fractional derivatives,fractional-order dynamic systems and PI D controllers”, in Proc.36th Conf. Decision & Control, pp. 4985–4990, 1997.
- I. Podlubny, “Fractional-order systems and PI D controllers”, IEEE Trans. Automatic Control, vol. 44, no. 1, pp. 208–214, 1999. DOI:10.1109/9.739144.
- B. Boudjehem, D. Boudjehem, “Fractional order controller design for desired response”, in Proc. Inst Mech Eng, Part 1: J Syst Control Eng, vol. 227, no. 2, pp. 243–251, 2013. DOI:10.1177/0959651812456647
- P. Shah, S. Agashe, “Design and optimization of fractional PID controller for higher order control system”, Int. Conf. IEEE ICART,pp. 588–592, 2013.
- S. Ghasemi, A. Tabesh, J. Askari-Marnani, “Application of fractionalcalculus theory to robust controller design for wind turbine generators”, IEEE Trans. Energy Convers, vol. 29, pp. 780–787,2014. DOI: 10.1109/TEC.2014.2321792.
- J. Y. Cao, B. G. Cao, “Design of fractional order controller based onparticle swarm optimization”, International Journal of Control,Automation and Systems, vol. 4, pp. 775–781, 2006.
- D.Xue,L.Meng,”Design of optimal fractional-order PID controller using multi-objective GA optimization,”Control and Decision Conference(CCDC);2009 June17-19;Guilin,IEEE;p.3849-3853.
- F. Padula, A. Visioli, “Tuning rules for optimal PID and fractional order PID controllers”, Journal of Proc. Cont., vol. 21, no. 1, pp. 69–81, 2011. DOI: 10.1016/j.jprocont. 2010.10.006.
- H. Senberber, A. Bagis, “Fractional PID controller design for fractional order systems using ABC algorithm”, in IEEE Proc. of 21stInternational Conference Electronics, Palanga, Lithuania, 2017, pp.1–7. DOI: 10.1109/Electronics.2017.7995218.
- H. Eirene , E. Lobo , M. Sau,” Modeling control of automatic voltage regulator with proportional integral derivative “,International Journal of Research in Engineering and Technology, Vol4, Issue9,2015.
- K.Eswaramma , G.Surya Kalyan,’ An Automatic Voltage Regulator(AVR) System Control using a P-I-DD Controller’ International Journal of Advance Engineering and Research Development, Volume 4, Issue 6, June -2017.
- M. Zamani, M. K. Ghartemani, N. Sadati, and M. Parniani, "Design of a fractional order PID controller for an AVR using particle swarm optimization,” Journal of IFAC, the International Federation of Automatic Control, Control Engineering Practice 17,pp.1380-1387, August 2009.
- P. Kundur,” Power system stability and control”, NewYork:McGraw-Hill.1994.
- G. Obinata, B. D. O Anderson, Model order reduction for control system design, Springer-Verlag, London, 2001.
- A.C. Antoulas, D.C. Sorensen, and S. Gugercin, "A survey of model order reduction method for large scale systems,” Contemporary mathematics, vol. 280, pp. 193-219, 2001.
- S. Biradar, S. Saxena, Y. Hote,” Simplified Model Identification of Automatic Voltage Regulator Using Model-Order Reduction”, International Conference on Power and Advanced Control Engineering (ICPACE),2015.
- H.Ma,D.Simon,” Evolutionary Computation with Biogeography-based Optimization”,Willey company publisher,jan2017.
- A. Nazar , A. Hadidi,” Biogeography Based Optimization Algorithm for Economic Load Dispatch of Power System”, American Journal of Advanced Scientific Research,vol.1,issue.3,p.99-103,2012.
- K. T. Chaturvedi, M. Pandit, and L. Srivastava, “Selforganizing hierarchical particle swarm Optimization for nonconvex economic dispatch,” IEEE Trans. Power Syst., vol. 23, no. 3, p. 1079, Aug. 2008.
- R. Storn, “Differential Evolution, A Simple and Efficient Heuristic Strategy for Global Optimization over Continuous Spaces”, Journal of Global Optimization, Vol. 11, Dordrecht, pp. 341-359, 1997
- M. Strens and A. Moore, “Policy Search using Paired Comparisons”, Journal of Machine Learning Research, Vol. 3, pp. 921-950, 2002.
- H.A. Abbass, Ruhul Sarker, and Charles Newton. “PDE: A pareto-frontier differential evolution approach for multi-objective optimization problems”. Proceedings, 2001.
- P. Melchior, P. Lanusse, O. Cois, F. Dancla, and A. Oustaloup,“Crone toolbox for matlab: Fractional systems toolbox,” in Tutorial Workshop on” Fractional Calculus Applications in Automatic Control and Robotics”, 41st IEEE CDC’02, 2002, pp. 9–13.
- T.Thotakura , P. Krishna Kanth Varma, P.V. Rama Raju,” Invasive Weed Optimization (IWO) Algorithm for Control of Nulls and Sidelobes in a Concentric Circular Antenna Array (CCAA)”, International Journal of Computer Applications,vol.126,no.3,pp.44-49,2015.
- B. Hekimoglu,” Sine-cosine algorithm-based optimization for automatic voltage regulator system”, Transactions of the Institute of Measurement and Control,pp.1–11,2018.
