Детекция аномалий для комплексирования данных лидарной и спутниковой локализации транспортного средства

Автор: Ладанова С.В., Юдин Д.А.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Информатика и управление
Статья в выпуске: 3 (59) т.15, 2023 года.
Бесплатный доступ
Иногда при локализации транспортного средства возникают случаи, когда один из источников дает недостоверные данные из-за возникающих непредвиденных условий. Например, при заезде в гараж система глобальной спутниковой навигации может перестать формировать достоверные данные, при выезде за пределы имеющейся трехмерной карты местности прекращается получение достоверной лидарной локализации, в ночные промежутки времени затрудняется локализация с помощью данных бортовых камер. Во всех этих случаях может помочь комплексирование нескольких источников данных локализации с детекцией аномалий. Под локализацией понимается определение положения транспортного средства и углов его ориентации в трехмерном пространстве. В данной статье представлен разработанный метод комплексирования данных лидарной и спутниковой навигации AnKF, основанный на расширенном фильтре Калмана и алгоритмах детекции аномалий. Особое внимание в статье уделено исследованию классических и нейросетевых подходов обнаружения аномалий в многомерных временных рядах бортовых систем локализации беспилотного автомобиля. Для количественной оценки результатов создан размеченный набор данных на основе симулятора беспилотного транспорта CARLA. В работе показано, что выявление аномалий в данных навигационных систем позволяет значительно повысить качество локализации беспилотного автомобиля.
Детекция аномалий, локализация, комплексирование, лидарные данные, данные систем спутниковой навигации, транспортное средство
Короткий адрес: https://sciup.org/142239993
IDR: 142239993 | УДК: 629.3.052.9
Anomaly detection for integrating lidar and satellite vehicle localization data
Sometimes, when localizing a vehicle, there are cases where one of the sources gives unreliable data due to unforeseen conditions that arise. For example, when driving into a garage, the global satellite navigation system may cease to generate reliable data; when leaving the existing 3-dimensional map of the area, reliable lidar localization ceases to be received; and at night, localization using on-board camera data is difficult. In all these cases, combining multiple localization data sources with anomaly detection can help. Localization defines the position of the vehicle and the angles of its orientation in three-dimensional space. This article presents the developed AnKF lidar and satellite navigation data integration method based on the extended Kalman filter and anomaly detection algorithms. Particular attention is paid to the study of classical and neural network approaches to detecting anomalies in multidimensional time series, which consist of detecting and processing deviations in data streams obtained during the localization of an unmanned vehicle. To quantify the results, a labeled data set was created based on the CARLA unmanned vehicle simulator. The paper shows that the detection of anomalies in the behavior of the system can significantly improve the quality of localization of an unmanned vehicle.
Текст научной статьи Детекция аномалий для комплексирования данных лидарной и спутниковой локализации транспортного средства
При работе важна точная локализация в робототехнике и беспилотном транспорте в задачах планирования движения, объезда препятствий [1], [2].
При локализации возникают сложности в условиях среды, когда один источник периодически выдает недостоверные данные в некоторых условиях. Например, при локализации с помощвю лидара и GPS при заезде в гараж или проезд под туннелем. В данном случае возможно пропадание актуальных данных с GPS, что представляет собой аномалию, которую необходимо обнаруживать как можно раньше. Это позволит не использовать неактуальные данные для локализации. В нашей работе мы хотим для локализации выполнить следующие подзадачи:
• определить положение с помощью данных с лидара и GPS по отдельности;
• определить корректность локализации от обоих источников и детектировать аномалии;
• осуществить комплексирование данных локализации с учетом аномалий. Часто эту операцию выполняют с помощью фильтра Калмана различных разновидностей [3], [4], [5], [6], [7], [8].
2. Анализ предметной области
2.1. Методы комплексирования данных бортовых систем локализации транспортных средств
2.2. Общие алгоритмы детекции аномалий
В статье представлен разработанный метод комплексирования данных лидарной и спутниковой навигации AnKF, отличающийся алгоритмом детекции аномалий, и размеченный набор данных на основе симулятора беспилотного транспорта CARLA, на котором произведен детальный анализ качества как алгоритмов детекции аномалий.
При возникновении задачи комплексирования данных чаще всего используют фильтры Калмана (KF - Kalman filter) [3]. Он имеет несколько вариантов, включая extended Kalman filter (EKF) [4], unscented Kalman filter (UKF) [5] и cubature Kalman filter (CKF) [9]. Эти фильтры используются во многих приложениях, включая системы управления, робототехнику, компьютерное зрение и навигацию. Благодаря этим методам мы можем оценить матожидание следующего состояния локализации.
Очень часто когда необходимо комплексировать данные с GPS и IMU, используют ST-EKF [6], ESKF [7] и invariant Kalman filter(IKF) [8], так как данный метод работает с Lie-алгеброй и предсказывает 6DOF.
Кроме аналитических подходов к комплексированию данных существуют нейросетевые, так, например, исследователи, разработавшие MM-Loc [10], проанализировали использование RNN [11], LSTM [12] для объединения данных локализации с помощью wifi, IMU. CNN-empowered Kalman filter (CNN-KF) [13] использует фильтр Калмана для объединения нескольких источников информации, при этом использует сверточную нейронную сеть (CNN) для детекции аномалий. SL-SRCKF [14] предложенный подход позволяет предсказывать локализацию в случае отключения GPS и предсказывает внутренние коэффициенты SRCKF с помощью LSTM. UKF(PNC+MNC CNN) [15] предложен подход оптимизировать внутренние параметры UKF [16], таких как Process Noise Covariance и Measurement Noise Covariance, с помощью нейронных сетей.
В данном разделе сравним алгоритмы детекции аномалий по типу аномалии, по типу задачи. Результат сравнения представлен в табл. 1.
Алгоритмы детекции аномалий делятся на следующие типы:
Таблица 1
Классификация алгоритмов детекции аномалии
|
Название алгоритма |
Тип алгоритма |
Тип аномалии |
Тип задачи |
|
Angle-based Outlier Detector (ABOD) [17] |
классический |
точечные |
кластеризация |
|
К-Nearest Neighbors (KNN) [18] |
классический |
точечные |
алгоритм ближайшего соседа |
|
Local Outlier Factor (LOF) [19] |
классический |
точечные |
кластеризация |
|
Histogram-based Outlier Detection (HBOS) [20] |
классический |
точечные |
классификация |
|
Isolation Forest [21] |
классический |
точечные |
классификация |
|
Minimum Covariance Determinant (MCD) [22] |
классический |
точечные |
статистический анализ |
|
One-class SVM (OCSVM) [23] |
классический |
точечные |
классификация |
|
PCA (Principal Component Analysis) [24] |
классический |
точечные |
классификация |
|
Variational Autoencoder (VAE) [25] |
нейросетевой |
точечные, коллективные |
статистический анализ |
|
Временная сверточная сеть (TCN) [26] |
нейросетевой |
точечные, коллективные |
статистический анализ |
-
• классические алгоритмы машинного обучения [17], [18], [19], [27], [20], [21], [22], [23], [24],
-
• нейросетевые алгоритмы (в данных алгоритмах используются нейронные сети) [25], [26].
Классификация по типу аномалии:
-
• Точечные аномалии - это аномалии, которые наблюдаются, если отдельный экземпляр данных сильно отличается по отношению к остальным данным [17], [18], [19], [27], [20], [21], [22], [23], [24], [25].
-
• Коллективные аномалии - это аномалии, которые наблюдаются, если последовательность связанных экземпляров данных (например, участок временного ряда) является аномальной по отношению к целому набору данных. Отдельный экземпляр данных в такой последовательности может не являться отклонением, однако совместное появление таких экземпляров является коллективной аномалией [25], [26].
Классификация по типу задачи для решения задачи аномалии:
-
• Классификация. Реализация данного метода основана на предположении о том, что при нормальных данных система может предсказывать один или несколько классов. Таким образом, экземпляр, не принадлежащий ни к одному из классов, является аномалией. Поиск аномалий проходит в два этапа: обучение и распознавание [20], [21], [23], [24].
-
• Кластеризация. Данная методика предполагает группировку похожих экземпляров в кластеры и не требует знаний о свойствах возможных отклонений. Выявление аномалий может строиться на следующем предположении: нормальные данные ближе к центру кластера, а аномальные - значительно дальше.
В случае, когда аномальные экземпляры не являются единичными, они также могут образовывать кластеры. Таким образом, их выявление строится на следующем предположении:
Нормальные данные образуют большие плотные кластеры, а аномальные - маленькие и разрозненные [17], [19].
• Алгоритм ближайшего соседа. Для использования данной методики необходимо определить понятие расстояния между объектами [18].
• Статистический анализ. При использовании этого подхода исследуется модель нормального поведения, которая затем сравнивается с реальным поведением. Если разница в реальном и предполагаем поведении системы, определяемая заданной функцией аномальности, выше установленного порога, делается вывод о наличии отклонений. Применяется предположение том, что нормальное поведение системы будет находиться в зоне высокой вероятности, в то время как выбросы - в зоне низкой [27], [22], [25], [26].
3. Разработка метода3.1. Постановка задачи
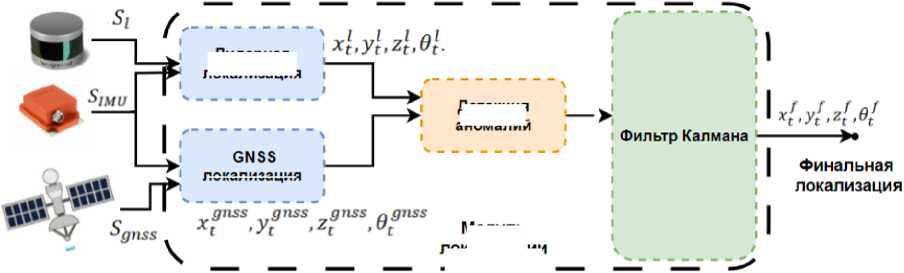
В этой задаче используются данные с лидара, которые представляют собой облако точек Si, а также да иные с GPS Sgnss и I MU S i mu - данные в виде линейных и угловых скоростей и абсолютных значений положения и ориентации. Для локализации с помощью лидара требуется также заранее построенная лидарная карта и начальная точка расположения на данной карте. На основании этих данных строится лидарная локализация с помощью алгоритма NDT х., ylt, zlt, 9lt и локализация с помощью GPS xgnss, удп88, zgnss, Qgnss; как показано на рис. 1, выделено голубым фоном. Такие алгоритмы предсказывают абсолютные значения положения и углов поворота и их скорости.
Затем значения абсолютной локализации подаются буфер. После того как в буфере набирается необходимое число сообщений, начинает работать алгоритм детекции аномалий. Это выделено на схеме оранжевым цветом. В данной работе рассмотрено несколько алгоритмов детекции аномалий, включающие как классические, так и нейросетевые.
Отфильтрованные значения (предсказанные как аномалия) не поступают в алгоритм фильтра Калмана.
локализация
Модуль локализации
Рис. 1. Схема предложенного подхода AnKF
Лидарная локализация
Детекция аномалий
3.2. Предложенный подход
Лидарная локализация В данном алгоритме представлена лидарная локализация на основе NDT [28], [29].
Лидарная карта M представляет с обой вектор из М то чек Xi = (x i , y i , z^ , г Е [1... М ], а х^ представляет собой k-й воксель ND с М^ точками, k-e среднее значение вокселя ND р ^ и ковариациоиная матрица S& определяются по формулам:
1 м к
» = м У ■ г=1
1 м к
^ к =
Д~Г 52 ( а кг - Р к )(Ж кі - Р к)Т .
к г =1
Далее выполняется преобразование 3.О-координат исходного облака X с N точками Хі,г Е [1 ... N ] в систему координат карты M по формуле aj = R^ + t', г де R - матрица поворота, a t‘ - вектор трансляции.
Оценка соответствия (fitness) между преобразованным входным облаком точек X и эталонной лидарной картой M, представленной в виде вокселей ND, выполняется по следующей формуле:
Е ( X , R ,t‘) = £exp "^ - ) ' - Р.>.
г
Высокие значения Е (X, R, t‘) означают, что входящее облако точек и лидарная карта хорошо ввіра.вненві. И задача оптимизации сводится к следующему виду:
arg max E( X , R , t‘).
Поэтому минимизируется функция f( R ,t‘) = -E( X , R ,t‘)
Rnew = R - H-1g, t’new = t‘ — H-1g, где g ii H частные производные и вторвю пропзводіівіе (руіікщш f.
Для выполнения данного алгоритма была заранее построена лидарная карта, которая показана на рис. 2.
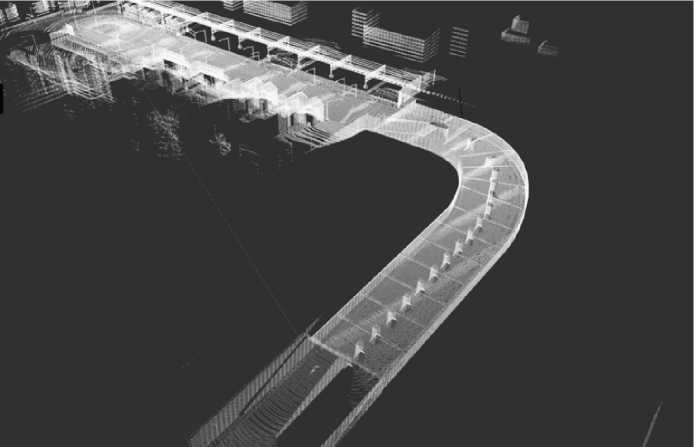
Рис. 2. Карта, построенная на. основании данных с лидара.
Алгоритмы детекции аномалий В данной работе предложено использовать пороговую детекцию аномалий с преобразованием абсолютных значений положения в скорости, а также исследовать возможности различных современных обучаемых методов. Предполагается, что транспортное средство двигается по ровной поверхности. И именно поэтому учитывается только угол поворота вокруг оси z. Подробности его функционирования представлены в алгоритме 1. В результате алгоритм предсказывает, относятся ли пришедшие навигационные данные к аномалии (выход «1») или нет (выход «0»).
Алгоритм 1 Пороговая детекция аномалий qnss / qnss 1 qnss / qnss
Input
x
t
,x
t vxL
t+i,xyt+i
Output 0 или 1 - не аномалия или аномалия.
Require: е > 0 ,
vxt ^
Д+1
-
x t
Vyt
←
sin(6 t )Mt , y t +i - y t cos(^ t )M t ,
qnss
V xt
←
qnss x t +1
-
qnss x t
sin( e qnss)M ,
qnss
←
qnss « t +1
-
У ?
if |VXt
-
cos(9 qnss )At , qnss qnss\
V xt I < E И \V yt - V yt I
< е then return 0
else if |v X t — v qnss | — ей |vL — у УП^ І — е then return 1 end if
4. Разработка набора данных4.1. Сбор данных с симулятора CARLA
CARLA [30] - это симулятор, который разработан для поддержки разработки, обучения и проверки систем автономного вождения. Этот симулятор предоставляет планы городов, здания, транспортные средства. Также поддерживает настройку наборов датчиков, условий окружающей среды, полный контроль над всеми динамическими объектами.
В исследуемой среде в симуляторе автомобиль оснащен RGB камерой, лидаром 32-лучевым, IMU и GPS.
Для наших дальнейших экспериментов по локализации в симуляторе CARLA выбрана карта Town03, так как на ней находится туннель, который отмечен на рис. 3 голубым прямоугольником.
В этой области образуются «аномалии» в данных глобальной спутниковой навигации GPS. Как и в реальных условиях, во время заезда в гараж или туннель данные GPS перестают менять свое значение до момента выезда из него. Именно эти данные считаются «аномалиями».
На рис. 4 справа представлено RGB изображение с камеры на автомобиле, а слева визуализировано 3D облако точек, полученное с лидара. Цветом показана дистанция до объектов. Чем ближе объекты к лидару, тем цвет ближе к фиолетовому. А чем дальше объекты, тем цвет ближе к красному.
Таблица 2
Статистика разработанных наборов данных
|
Параметры набора данных |
Track-1 |
Track-2 |
Track-3 |
|
Размер (количество фреймов данных) |
930 |
1210 |
1273 |
|
Вероятность аномалии |
0.31 |
0.21 |
0.24 |
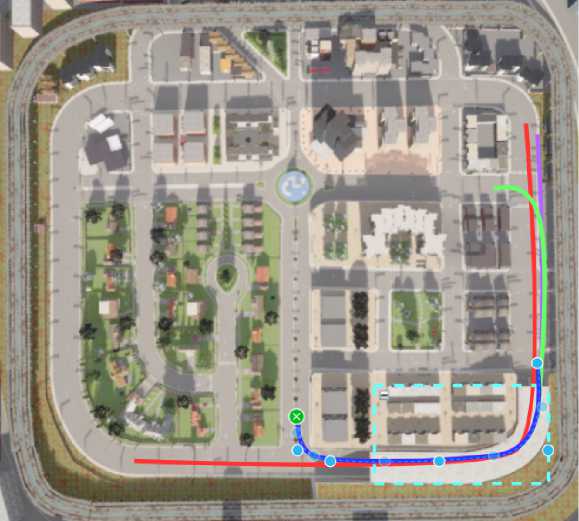
Рис. 3. Карта. Town03: Красным выделена, траектория, по которой строилась лидарная карта, зеленая траектория движения автомобиля в Track-1, сииияя - Track-2, фиолетовый - Track-3. Голубым прямоугольником выделена, область пропадания сигнала. GPS (в туннеле)
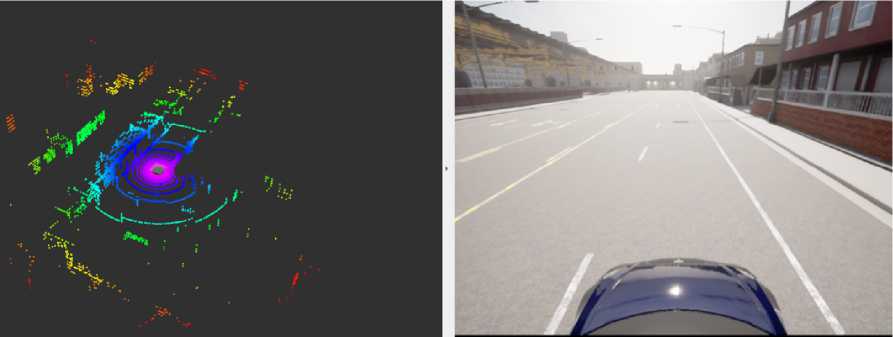
Рис. 4. Визуализация с помощью операционной системы роботов ROS: слева. - лидарпое облако точек с 32 лучевого лидара, справа. - данные с RGB камеры
Данные группировались скользящим окном отдельно по временным рядам для лидар-ной локализациии и отдельно по данным GPS локализации. Временной ряд считался аномальным, если в нем встретилась хотя бы одна, аномалия. Таким образом, был сформирован набор данных для детекции аномалий. Статистика, по его содержимому представлена, в табл. 2.
Под вероятностью аномалии понимается отношение количества подпоследовательностей данных с аномалиями на количество всех подпоследовательностей. Чем дольше автомобиль передвигался под мостом, тем больше вероятность аномалии.
5. Результаты5.1. Оценка качества детекции аномалий
Метриками качества, для детекции аномалий в настоящей работе являются оценки полноты (Recall) и точности (Precision), которые имеют дипазон значений от 0 до 1.
Таблица 3
Результаты оценки полноты (Recall) детекции аномалий
|
Алгоритм детекции аномалий |
Track-1 |
Track-2 |
Track-3 |
Average Recall |
|
Пороговый метод |
0.4283 |
0.4415 |
0.4336 |
0.4345 |
|
FB [27] |
0.4509 |
0.451 |
0.4511 |
0.4510 |
|
HBOS [20] |
0.4508 |
0.4607 |
0.4611 |
0.4575 |
|
IForest [21] |
0.3707 |
0.3695 |
0.3690 |
0.3697 |
|
KNN [18] |
0.3280 |
0.3379 |
0.3374 |
0.3344 |
|
LOF [19] |
0.4603 |
0.4596 |
0.4601 |
0.4600 |
|
РСА [24] |
0.4809 |
0.4710 |
0.4706 |
0.4742 |
|
VAE [25] |
0.6184 |
0.6284 |
0.6265 |
0.6244 |
|
RNN [11] |
0.6292 |
0.6312 |
0.6327 |
0.6310 |
|
TCN [26] |
0.6938 |
0.6857 |
0.6851 |
0.6882 |
В табл. 3 и 4 представлены результаты детекции аномалий алгоритмами K-Nearest neighbors (KNN) [18], local outlier factor (LOF) [19], histogram-based outlier detection (HBOS) [20], isolation forest (IForest) [21], principal component analysis(PCA) [24], variational autoencoder (VAE), временной сверточной сети (TON).
Как видно, нейросетевые методы (recurrent neural network (RNN), variational autoencoder (VAE), временная сверточная сеть (TON)) показывают значительно лучшие результаты на всех треках набора данных, чем классические обучаемые подходы (К-Nearest neighbors (KNN) [18], local outlier factor (LOF) [19], histogram-based outlier detection (HBOS) [20], isolation forest (IForest) [21], principal component analysis(PCA) [24]). Однако по точности VAE не намного уступает PGA. Таким образом, некоторые классические алгоритмы показывают сравнимые по точности результаты при достаточно хорошей настойке параметров.
Наиболее качественным методом является подход TCN, основанный на глубокой сверточной нейронной сети, которая позволяет автоматически сформировать признаки для дальнейшей классификации аномалий. Он более чем на 31.1% и 30% по метрикам полноты и точности превосходит наилучший классический обучаемый метод РСА. Также он на 8.5% и 18.9% по полноте и точности лучше, чем другой наиболее качественный нейросетевой алгоритм.
Предложенный аналитический пороговый подход превосходит ряд классических обучаемых методов (IForest, KNN), но существенно уступает нейросетевым обучаемым методам детекции аномалий.
Таблица 4
Результаты оценки точности (Precision) детекции аномалий
|
Алгоритм детекции аномалий |
Track-1 |
Track-2 |
Track-3 |
Average Precision |
|
Пороговый метод |
0.2673 |
0.3027 |
0.2967 |
0.2889 |
|
FB [27] |
0.3421 |
0.3911 |
0.3913 |
0.3748 |
|
HBOS [20] |
0.3421 |
0.3760 |
0.3783 |
0.3655 |
|
IForest [21] |
0.2368 |
0.2368 |
0.2358 |
0.2365 |
|
KNN [18] |
0.2105 |
0.2515 |
0.2504 |
0.2375 |
|
LOF [19] |
0.3421 |
0.3537 |
0.3544 |
0.3501 |
|
РСА [24] |
0.3947 |
0.4027 |
0.4033 |
0.4002 |
|
VAE [25] |
0.3684 |
0.3774 |
0.3798 |
0.3752 |
|
RNN [11] |
0.4601 |
0.4653 |
0.4651 |
0.4635 |
|
TCN [26] |
0.5635 |
0.5758 |
0.5764 |
0.5719 |
Таблица 5
Результаты оценки ошибки локализации после детекции аномалий, метрика качества АРЕ, м
|
Алгоритм детекции аномалий |
Track-01 |
Track-02 |
Track-03 |
Average APE |
|
ЕКЕ [4] |
0.8155 |
0.8710 |
0.7805 |
0.8223 |
|
АпКЕ (Пороговый метод) |
0.4015 |
0.3815 |
0.4065 |
0.3965 |
|
АпКЕ (ЕВ) |
0.8010 |
0.7801 |
0.7135 |
0.7648 |
|
АпКЕ (HBOS) |
0.8145 |
0.8645 |
0.8321 |
0.8370 |
|
АпКЕ (IF) |
0.8885 |
0.8160 |
0.7934 |
0.8326 |
|
АпКЕ (KNN) |
0.4125 |
0.3810 |
0.4037 |
0.3991 |
|
АпКЕ (LOF) |
0.3755 |
0.3465 |
0.3921 |
0.3713 |
|
АпКЕ (РСА) |
0.4825 |
0.4846 |
0.4709 |
0.4793 |
|
АпКЕ (VAE) |
0.3190 |
0.2945 |
0.3267 |
0.3134 |
|
АпКЕ (RNN) |
0.3107 |
0.3109 |
0.3241 |
0.3152 |
|
АпКЕ (TCN) |
0.3065 |
0.3115 |
0.3096 |
0.3092 |
5.2. Оценка качества комплексирования лидарной и спутниковой локализации
Для оценки метрики качества локализации использована стандартная метрика качества для оценки ошибки локализации АРЕ [31]. На основании данных из табл. 5 можно сделать вывод, что алгоритм комплексирования АпКЕ даже с простой пороговой детекцией аномалий улучшает локализацию. При этом применение пороговой детекции позволяет превзойти большинство классических обучаемых алгоритмов обнаружения аномалий. Это связано с тем, что довольно продолжительное время (во время проезда под туннелем) данные GPS дают неверную локализацию, для обработки именно таких ситуаций разрабатывался предложенный пороговый метод.
Алгоритмы, которые показывали наилучшие результаты по полноте и точности детекции аномалий (VAE, RNN, TCN), также демонстрируют лучшие результаты по локализации при применении в составе комплексного подхода АпКЕ.
Наиболее качественного результата на всех треках разработанного набора данных достигает подход АпКЕ, использующий метод детекции аномалий TCN. Ошибка локализации составляет в среднем менее 31 см, что более чем в 2 раза лучше ошибки базового расширенного фильтра Калмана ЕКЕ, комплексирующего входные данные GPS и лидарной локализации.
Результаты локализации АпКЕ (пороговый метод), АпКЕ (LOF) отличаются незначительно как показано на рис. 5. При этом АпКЕ (TCN) показывает более точную и шумную локализацию, чем АпКЕ (пороговый метод) и АпКЕ (LOF).
6. Заключение
В настоящей статье детально исследован предложенный подход АпКЕ к локализации транспортного средства, обеспечивающий работу с различными современными алгоритмами детекции аномалий. В частности, рассматривались условия проезда автомобиля под туннелем, когда источник данных на основе GPS выдает недостоверную информацию. В АпКЕ по многомерным временным рядам от систем лидарной и GPS локализации происходит детекция аномалий и затем данные, предсказанные как достоверные, подаются в расширенный фильтр Калмана.
Созданный на основе симулятора CARLA набор данных позволил провести количественные эксперименты с предложенным подходом в разных дорожных ситуациях (при старте автомобиля внутри туннеля, при старте вне туннеля, но с полным проездом под туннелем и др.).
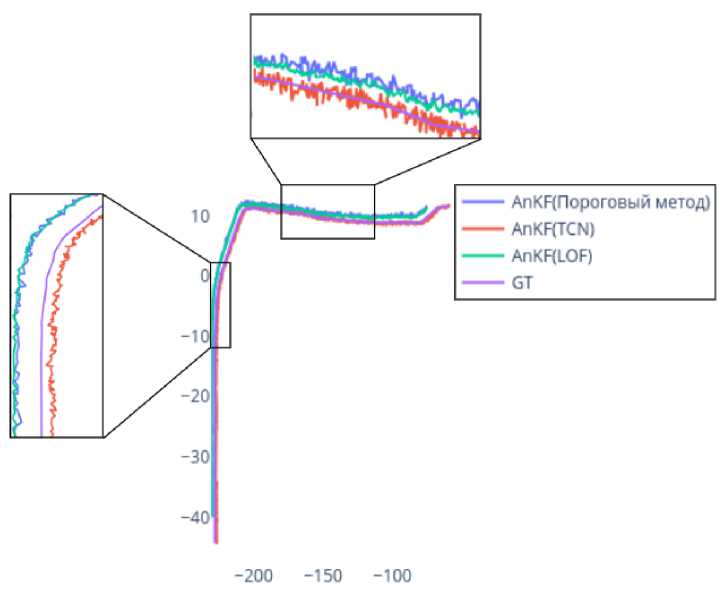
Рис. 5. Пример локализации транспортного средства, с помощью подходов AnKF (пороговый метод), AnKF (LOF), AnKF (TCN)
Было выявлено, что нейросетевые алгоритмы (TCN, RNN) более качественно обнаруживают аномалии, чем классические обучаемые подходы. Это подтверждается как значениями метрик полноты и точности классификации, так и оценкой качества, локализации после детекции аномалий.
Было показано, что применение предложенного необучаемого порогового алгоритма, детекции аномалий в составе подхода, комплексирования AnKF позволило по метрике качества. локализации превзойти большинство классических обучаемых моделей детекции аномалий (FB, HBOS, IForest, KNN, РСА). Это свидетельствует о потенциале разработки специализированных аналитических алгоритмов для задач комплексирования навигационных данных.
В дальнейшем предложенный подход можно расширить и на. другие источники навигационных данных, например, на. использование результатов локализации транспортного средства по данным бортовых камер или радаров.
В настоящей работе использовалась заранее построенная статическая карта, для локализации по лидарным облакам точек, то есть она. не обновлялась при изменении окружающей среды. Перспективным является исследование возможности обновления карты, что позволит актуализировать информацию о местности (дорожные работы, строительство новых сооружений) и может улучшить как лидарную локализацию, так и итоговое качество локализации предложенного подхода.
Работа, выполнена, при поддержке Аналитического центра, при Правительстве Российской Федерации в соответствии с договором о субсидии (идентификатор договора. 000000D730321P5Q0002; грант № 70-2021-00138).
Список литературы Детекция аномалий для комплексирования данных лидарной и спутниковой локализации транспортного средства
- Wen J., Tang J., Liu H., Qian C., Fan X. Real-Time Scan-to-Map Matching Localization System Based on Lightweight Pre-Built Occupancy High-Definition Map // Remote Sensing. 2023. V. 15, N 3. P. 595.
- Kim Y., Jeong J., Kim A. Stereo camera localization in 3D lidar maps // 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2018. P. 1–9.
- Kim Y., Bang H. Introduction to Kalman filter and its applications // Introduction and Implementations of the Kalman Filter. 2018. V. 1. P. 1–16.
- Hao Y., Xu A., Sui X., Wang Y. A modified extended Kalman filter for a two-antenna GPS/INS vehicular navigation system // Sensors. 2018. V. 18(11). P. 3809.
- Wan E.A., Van Der Merwe R. The unscented Kalman filter // Kalman filtering and neural networks. Wiley Online Library, 2001. P. 221–280.
- Wang M., Wu W., Zhou P., He X. State transformation extended Kalman filter for GPS/SINS tightly coupled integration // Gps Solutions. 2018. V. 22. P. 1–12.
- Li Z., Zhang Y. Constrained ESKF for UAV positioning in indoor corridor environment based on IMU and WiFi // Sensors. 2022. V. 22, N 1. P. 391.
- Weck M., Ye G. Sharp corner tracking using the IKF control strategy // CIRP Annals. 1990. V. 39, N 1. P. 437–441.
- Haykin S., Arasaratnam I. Cubature kalman filters // IEEE Trans. Autom. Control. 2009. V. 54, N 6. P. 1254–1269.
- Wei X., Wei Zh., Radu V. Sensor-fusion for smartphone location tracking using hybrid multimodal deep neural networks // Sensors. 2021. V. 21, N 22. P. 7488. DOI: 10.3390/s21227488.
- Nanduri A., Sherry L. Anomaly detection in aircraft data using Recurrent Neural Networks (RNN) // Integrated Communications Navigation and Surveillance (ICNS). 2016. P. 5C2–1.
- Smagulova K., James A.P. A survey on LSTM memristive neural network architectures and applications // The European Physical Journal Special Topics. 2019. V. 228, N 10. P. 2313–2324.
- Van Wyk F., Wang Y., Khojandi A., Masoud N. Real-time sensor anomaly detection and identification in automated vehicles // IEEE Transactions on Intelligent Transportation Systems. 2019. V. 21, N 3. P. 1264–1276.
- Shen C., Zhang Y., Guo X., Chen X., Cao H., Tang J., Li J., Liu J. Seamless GPS/inertial navigation system based on self-learning square-root cubature Kalman filter // IEEE Transactions on Industrial Electronics. 2020. V. 68, N 1. P. 499–508.
- Abdrazakov L., Yudin D. Neural Network Adaptation of the Kalman Filter for Odometry Fusion // Proceedings of the Fifth International Scientific Conference «Intelligent Information Technologies for Industry» (IITI’21). 2022. P. 44–54.
- Shavin M.J. Numerical Nonlinear Filtering Methods for Estimating the State of a Quadcopter with Rotary Rotors // Proceedings of the Moscow Institute of Physics and Technology. 2019. V. 11, N 3(43). P. 86–95.
- Kriegel H.P., Schubert M., Zimek A. Angle-based outlier detection in high-dimensional data // Proceedings of the 14th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining. 2008. P. 444–452.
- Rauch J., Olatunji I.E., Khosla M. Achieving differential privacy for k-nearest neighbors based outlier detection by data partitioning // arXiv preprint arXiv:2104.07938. 2021.
- Alghushairy O., Alsini R., Soule T., Ma X. A review of local outlier factor algorithms for outlier detection in big data streams // Big Data and Cognitive Computing. 2020. V. 5, N 1. P. 1.
- Paulauskas N., Baskys A. Application of histogram-based outlier scores to detect computer network anomalies // Electronics. 2019. V. 8, N 11. P. 1251.
- Liu F.T., Ting K.M., Zhou Z.H. Isolation forest // 2008 eighth IEEE international conference on data mining. 2008. P. 413–422.
- Mohammadi M., Sarmad M. Outlier detection for support vector machine using minimum covariance determinant estimator // Journal of AI and Data Mining, 2019. V. 7, N 2. P. 299–309. Shahrood University of Technology.
- Sch¨olkopf B., Platt J.C., Shawe-Taylor J., Smola A.J., Williamson R.C. Estimating the support of a high-dimensional distribution // Neural Computation. 2001. V. 13, N 7. P. 1443–1471.
- Shyu M.L., Chen S.C., Sarinnapakorn K., Chang L. A novel anomaly detection scheme based on principal component classifier. Tech. Report, Miami Univ Coral Gables Fl Dept of Electrical and Computer Engineering, 2003.
- Li Y., Wang Y., Ma X. Variational autoencoder-based outlier detection for high-dimensional data // Intelligent Data Analysis. 2019. V. 23, N 5. P. 991–1002.
- Herzen J., Lassig F., Piazzetta S.G., Neuer T., Tafti L., Raille G., Van Pottelbergh T., Pasieka M., Skrodzki A., Huguenin N., Dumonal M., Koscisz J., Bader D., Gusset F., Benheddi M., Williamson C., Kosinski M., Petrik M. Darts: User-Friendly Modern Machine Learning for Time Series // Journal of Machine Learning Research. 2022. V. 23, N 124. P. 1–6. [Online]. Available: http://jmlr.org/papers/v23/21-1177.html
- Lazarevic A., Kumar V. Feature bagging for outlier detection // Proceedings of the eleventh ACM SIGKDD international conference on Knowledge discovery in data mining. 2005. P. 157–166.
- Biber P., Straber W. The normal distributions transform: A new approach to laser scan matching // Proceedings 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003). 2003. V. 3. P. 2743–2748.
- Kato S., Tokunaga S., Maruyama Y., Maeda S., Hirabayashi M., Kitsukawa Y., Monrroy A., Ando T., Fujii Y., Azumi T. Autoware on board: Enabling autonomous vehicles with embedded systems // 2018 ACM/IEEE 9th International Conference on Cyber-Physical Systems (ICCPS). 2018. P. 287–296.
- Dosovitskiy A., Ros G., Codevilla F., Lopez A., Koltun V. CARLA: An Open Urban Driving Simulator // Proceedings of the 1st Annual Conference on Robot Learning. 2017. P. 1–16.
- Lu F., Milios E. Globally consistent range scan alignment for environment mapping // Autonomous Robots. 1997. V. 4. P. 333–349.
