Диагностика состояния и реконфигурация управления в механических системах с избыточными силовыми гироскопическими связями

Автор: Сомов Е.И., Макаров В.П.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Управление и моделирование
Статья в выпуске: 3 т.8, 2006 года.
Бесплатный доступ
Представляются приемы логико-динамического моделирования развития аварийных ситуаций, критерии диагностирования состояния, методы последовательной классификации отказов аппа- ратуры контура управления и реконфигурации управления в механических системах с избыточ- ными гироскопическими связями. Приводятся некоторые результаты анализа гиросиловых отка- зоустойчивых систем управления ориентацией космических аппаратов.
Короткий адрес: https://sciup.org/148197854
IDR: 148197854 | УДК: 531.383
State diagnosis and control reconfiguration at mechanical systems with redundant torque gyroscopic couplings
Some ways for logic-dynamic modeling a progress of emergency situations, criterions for the state diagnosis, methods for successive classification of the device faults at control loop and control reconfiguration in mechanical systems with redundant torque gyroscopic couplings, are presented. Some results on analysis of the gyromoment fault tolerant spacecraft attitude control systems, are produced.
Текст научной статьи Диагностика состояния и реконфигурация управления в механических системах с избыточными силовыми гироскопическими связями
Проблема обеспечения отказоустойчивости и динамической надежности является актуальной для обширного класса механических систем в составе объектов машиностроения, энергетики, аэрокосмической техники и т.д. В отличие от неопределенности либо медленного изменения параметров, полный отказ какой-либо аппаратуры в основном контуре управления принципиально изменяет структуру системы и может привести к возникновению и развитию в ней аварийной ситуации, а далее, если не предусмотрены меры для оперативного блокирования такой ситуации – к катастрофическому поведению системы. В статье представляются методы логико-динамического моделирования управляемых механических систем с возможным нарушением структуры, критерии диагностирования состояния, методы принятия решения об отказе, приемы блокирования развития аварийной ситуации и реконфигурации управления. Приводятся некоторые результаты динамического анализа гиросиловых отказоустойчивых систем управления движением космических аппаратов.
Моделирование логико-динамического управляемого объекта
Обобщенный нелинейный управляемый объект O с вектором состояния
x( t ) ∈ H ⊂ Rn ν принимается [1] в виде D + x( t ) = F o (x( t ), u , p ( t ,x), γ ν f ( t )),
-
x( t 0) = x0; t ∈ T t 0 ≡ [ t 0, ∞ ) (1)
y( t ) = ψ o (x( t ), γ ν f ( t ));
z o ( t ) =φ o (x( t ),y( t ), p ( t ,x)), (2)
где D + – символ правой производной по времени; x0 ∈ H 0 ⊂ H ; y( t ) ∈ R r ν s – вектор измерения состояния объекта, используемый также и для диагностики; вектор-функция z o ( t ) ∈ R r ν f описывает условия возникновения отказов и последующего развития аварийной ситуации; u = { uj } ∈ U ⊂ R r ν c является вектором управления, а p ( t , x) ∈ P – век-тор-функцией параметрических возмущений в классе P . Вектор логических переменных γ ν f ( t ) ∈ B m ≡ B × B × ⋅⋅⋅ × B , B = (0,1) является выходом асинхронного логического автомата (АЛА) A f с памятью для генерации возможных отказов
γ ν f = δ f ( κ ν f , l ν f ) ;
f f ff f f f f
κ ν+ 1 = λ ( κ ν , l ν ), κ ν ≡ κ ( ν ), κ 0 = κ (0);
l ν f ≡ lf ( ν ) = gf (z o ( t ν f )), (3)
где tνf – моменты времени возникновения отказа и развития аварийной ситуации, причем автоматное время ν ∈ N0 ≡ [0,1,2,...) связано с непрерывным временем t соотноше-f f f f f ff нием t = tν + (τ tν ) ; τ ∈ τν ≡ [tν ,tν+1) , вектор lνf (t) = const ∀t ∈ τνf и изменение логического вектора γνf в общем случае приводит к изменению размерностей векторов x(t) и y(t) в моменты времени t = tνf при нелинейных непрерывных отображениях f xf f yf
x( t ν+ ) = P ν (x( t ν - )) и y( t ν + ) = P ν (y( t ν- )) .
Задачи диагностикии реконфигурации управления
Пусть заданы фиксированные кратные периоды дискретизации Tu , Tq ≤ Tu и Tr ≥ Tu соответственно управления, измерения и реконфигурации. Будем использовать обозначения x k = x( tk ); tk = kTu ; ts = sTq ; t µ = µ Tr и xf k = F T u (x s ), x µ f = F T r (x k ), где xf k является значением переменной x s , измеренной с периодом дискретизации Tq и отфильтрованной к моменту времени tk , а F Ty ( ⋅ ) – оператором цифровой фильтрации с периодом дискретности Ty , y = u,r . Пусть также заданы подсистемы дискретного измерения состояния управляемого объекта O и цифровой фильтрации доступных измерений:
-
• для диагностики состояния объект а y d s =ψ d (y s );z k d f = F Tu (y s d),
k , s ∈ N0; (4)
-
• для формирования управления и его реконфигурации
y u s =ψ u (y s ); yf k = F Tu (y s u);
zf µ = F Tr (z k d f), µ , k , s ∈ N0 . (5)
Основные задачи диагностики и реконфигурации управления состоят в синтезе:
-
• синхронного логического автомата (СЛА) A d с памятью для диагностики объект а
γ k d =δ d ( κ k d , l k d ); κ k d + 1 =λ d ( κ k d , l k d ),
κ 0 d = κ d ( t 0 ) , (6)
с логическими векторами состояния κ k d , входа lkd = gd (z k d f)и выхода γ k d ;
-
• синхронного логического автомата A r реконфигурации, также с памятью, для описания процессов блокирования аварийной ситуации и реконфигурации контура управления
r r rr r r rr
γ µ =δ ( κ µ , l µ ); κ µ+ 1 =λ ( κ µ , l µ ),
κ 0 r = κ r ( t 0 ) , (7)
при логических векторах состояния κµr , вхо-r r f df df d r да lµ =g (zk,γµ ) с γµ =FTr(zk) и выхода γµ;
-
• нелинейного закона управления
u k = U (xe k ,yf k ,У о k , Y^ );
x ek+1 = Fe(x ek,yfk ,У o, uk , Y 4 , Y^ ), xeO = xe(t0), Ц, k e N0, (8)
где yfek =FTu(ψeu(yes)); yes =ψeo(xes,γkd)и вектор xes ∈ Rnµe является вектором состояния упрощенной дискретной модели объекта xes+1 = Fe(xes,uk,γkd,γµr) ;
xe0 = xe( t 0), (9)
вектор x , = x (t,) e Rnм представляет его ek e k оценку, размерность nµe ≤ n = max{nν } и вектор yok представляет программное движение по выходу, с его реконфигурациями в соответствии с выходными сигналами СЛА Ar .
Замкнутые логико-динамические контуры (4) – (9) предназначены для отказоустойчивого управления объектом (1) – (3).
Синтез логическихавтоматов диагностики
В наиболее совершенных механических управляемых системах, например в системах управления движением (СУД) космических аппаратов (КА) информационного назначе- ния – связи, навигации, наблюдения за объектами на поверхности Земли, применяется трехуровневая логическая система, реализованная с помощью бортовой вычислительной техники:
-
1. на нижнем уровне – СЛА Ad d , встроенные непосредственно в бортовые приборы для автоматического мониторинга их состояния на основе измерения и оценки физических переменных (токов, напряжений, механических перемещений, скоростей и т.д.);
-
2. на среднем уровне – СЛА Ac d для диагностики состояния каналов управления (рыскания, крена, тангажа, контура управления панелями солнечных батарей и т.д.);
-
3. на высшем “системном” уровне – СЛА A d для глобальной диагностики СУД КА.
На двух последних уровнях функциональная диагностика выполняется на основе сравнения выходных сигналов моделей нормального и фактического функционирования с использованием эталонных моделей [2].
Результаты анализа процесса диагностики состояния СУД, проводимого специалистами центра управления полетом КА, указывают на высокую эффективность методов, основанных на использовании детальной информации о приборах, алгоритмах управления, законах движения КА и множестве других элементов процесса его функционирования, а также некоторых инвариантных соотношений между переменными состояния системы. Неисправность СУД проявляется в рассогласовании характеристик процессов управления реальной системы и ее эталонной модели на величину, превышающую априорно известные ошибки измерений датчиков и отработки управляющих воздействий исполнительными органами. Характер и значения указанных рассогласований позволяют выдвинуть конечное число гипотез, объясняющих неисправность с глубиной, достаточной для принятия решения по управлению резервами. Каждой гипотезе соответствует определенная ветвь АЛА Af (3), описывающая возникновение отказа и развития аварийной ситуации в объекте (1), (2). Для каждой такой ветви сначала с помощью инженерных методов разрабатывается логическая таблица истинности процесса контроля, на основе которой далее стандартными компьютерными методами синтезируется соответствующий СЛА диагностики. Конкретный пример построения простейшего СЛА диагностики состояния СУД КА в виде логической функции выбора представлен в [3].
Диагностика с использованием критерия Вальда
Для реализации схемы локализации отказов СУД на программном уровне в БЦВМ необходимо решить задачу выбора информативных параметров. Очевидно, что с уменьшением числа контролируемых параметров процесс диагностики упрощается. Алгоритм диагностики СУД по ее эталонной модели, работает в фоновом режиме, т.е. в процессе управления движением КА. При этом аномальная ситуация выявляется посредством вычисления вектора невязок между измеренными (X) и модельными (Хm) параметрами:
Поведение параметров контроля ej, j=1, 2, во времени можно рассматривать как случайный процесс, характеристики которого зависят от множества факторов. К ним, в частности, относятся, ошибки измерения; погрешности отработки управляющих воздействий; погрешности моделирования динамики движения вследствие упрощения модели; неточности знания конструктивных параметров КА, возмущающих воздействий и т.д. В этом случае следует проводить классификацию не мгновенных значений невязок ejk, а некоторого случайного процесса, представленного дискретной последовательностью значений ejk n, где k=1, 2…n. Каждое из этих значений предъявляется для анализа в соответствующие моменты времени tk . Классификация такого случайного процесса может быть осуществлена с помощью математического аппарата последовательной проверки гипотез, в частности, на основе последовательного критерия отношения вероятностей Вальда (ПКОВ) [4, 5], который обладает важ- ными свойствами:
сходимостью с вероятностью 1, следовательно выбором пороговых значений α и β можно обеспечить любой априорно заданный уровень погрешности классификации;
не требует независимости и равенства распределений вероятностей классифицируемых случайных векторов;
обеспечивает минимизацию среднего числа наблюдений, необходимых для достижения заданного уровня достоверности оценки, и минимизацию среднего объема хранимой в процессе классификации информации, что значительно упрощает его реализацию в бортовом программном обеспечении СУД.
Процедура анализа с помощью критерия Вальда реализуется следующим образом. Для каждого значения невязки параметров вычисляется вектор логарифмического отношения правдоподобия:
λ jk = – ln (P(ejk/ W1) / (P(ejk/W2)), (11) где ejk – значение вектора ej на k-ом шаге вычислений; P(ejk/Wj) – функция условной плотности вероятностей ejk при фиксированном событии, состоящем в том, что ejk принадлежит классу j=1, 2. Величина λ jk также является случайной. Поэтому для независимого распределения ej вектор суммарного логарифмического правдоподобия после n наблюдений с учетом (10) и (11) равен:
L= – ln{P[(e11,e12...e1n)/ W1]/
P[(e21,e22...e2n)/W2]} = nn =-∑ln { P[(e1k)/W1] / P[(e2k)/W2]} =∑λjk, 11
(12) где k=1,2,…n – номер шага контроля; W1 и W2 – классы состояния системы (соответственно “норма” и “не норма”). Решающее правило ПКОВ состоит в покомпонентном сравнении вектора L (12) с фиксированными границами α и β этого критерия и имеет вид:
L ≤ α → е1n ∈ W1 ,
α << L << β ??? (обработку измерений продолжать)
β ≤ L → е 2n ∈ W2 .
Синтез логического автомата реконфигурации управления
Процесс восстановления работоспособности СУД КА включает следующую последовательность действий:
-
1. исключение неисправного прибора из контура управления;
-
2. анализ наличия резерва у отказавшего прибора, в том числе функционального в отношении СУД;
-
3. подготовка и включение резервного прибора в контур управления или реконфигурация СУД в случае применения функционального резерва;
-
4. восстановление ориентации КА;
-
5. формирование информации о готовности СУД к выполнению целевых задач КА.
Результаты определения неисправного прибора поступают в блок управления восстановлением работоспособности в виде СЛА A r реконфигурации. Набор стратегий восстановлением работоспособности СУД (переключение на структурный или функциональный резерв, последовательность изменения режимов работы, восстановление ориентации и т. п.), соответствующих возможным отказам приборов СУД, реализуется на программном уровне в БЦВМ. Выбор алгоритмов реконфигурации осуществляется на основе инженерных методов и, как правило, индивидуален для конкретного класса КА. Для каждого вида отказов приборов СУД и их комбинаций составляются логические таблицы истинности, а затем компьютерными методами синтезируется СЛА A r реконфигурации.
Отказоустойчивое гиросиловое управление ориентацией КА
Возможности обеспечения отказоустойчивости гиросиловых СУД с избыточным числом гиродинов фактически определяются на этапе проектирования. Здесь важную роль играет выбор схемы силового гироскопического комплекса (СГК) и его расположения относительного строительных осей КА. В СГК класса 2-SPE на рис. 1 на основе четырех гиродинов один гиродин (№4) находится в “холодном” резерве, все
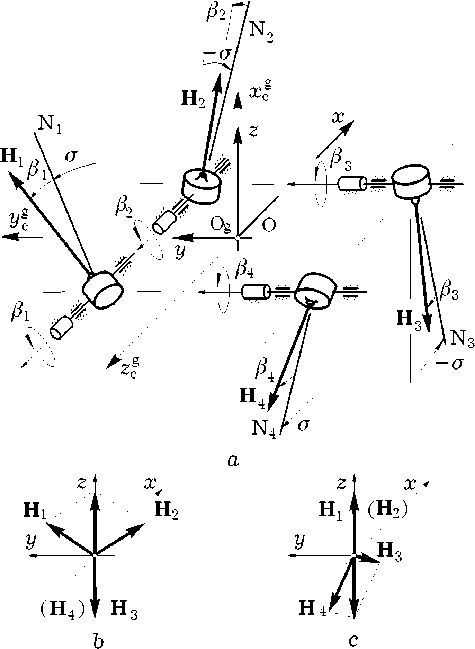
Рис.1. Схемы силового гироскопического комплекса
гиродины имеют возможность изменять положение вектора собственного кинетического момента H p в диапазоне ± 90 ° от базового направления N p , p = 1:4, см. рис. 1 a . При отказе любого одного гиродина в этой схеме соответствующая реконфигурация СГК полностью нейтрализует такую аварийную ситуацию, см. рис. 1 b и рис. 1 c . [6]
Большой степенью отказоустойчивости обладает схема СГК типа 3-SPE на основе шести гиродинов, распределенных в три пары (рис. 2). Данная схема не имеет “холодного” резерва, но остается работоспособной при отказе любых трех гиродинов [7]. Рис. 3 демонстрирует зависимость динамических свойств СГК класса 2-SPE на рис. 1 от его расположения на корпусе КА, а именно переходные процессы по углу тангажа при отказе ГД №3, рис. 3 a и 3 b – при совпадении оси x cg СГК со строительными осями КА Oz и Oy соответственно [6].
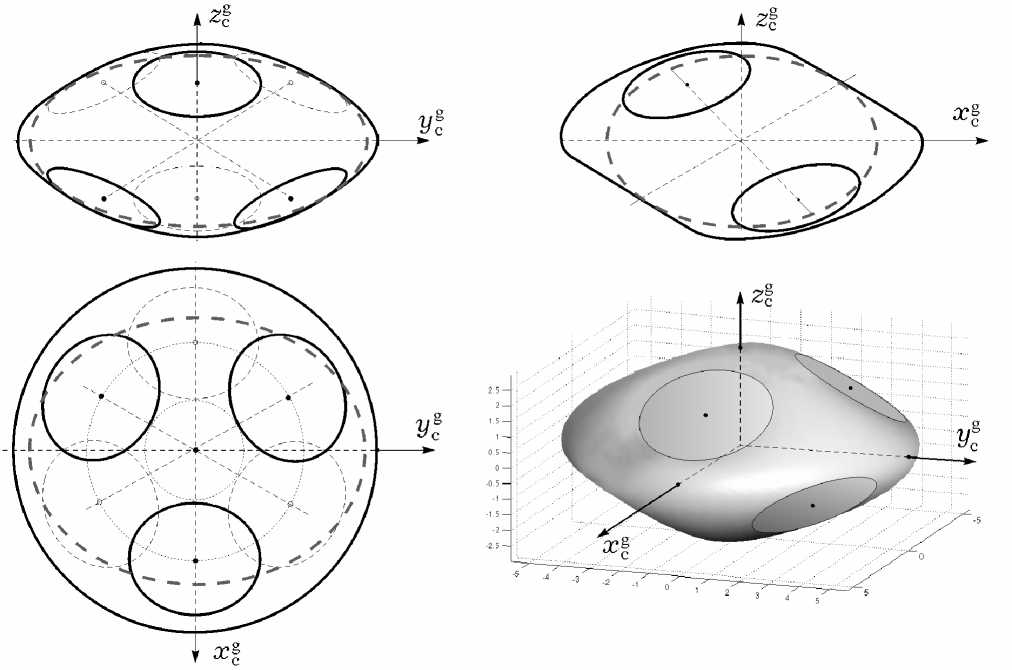
Рис. 2. Область вариации вектора кинетического момента схемы 3-SPE
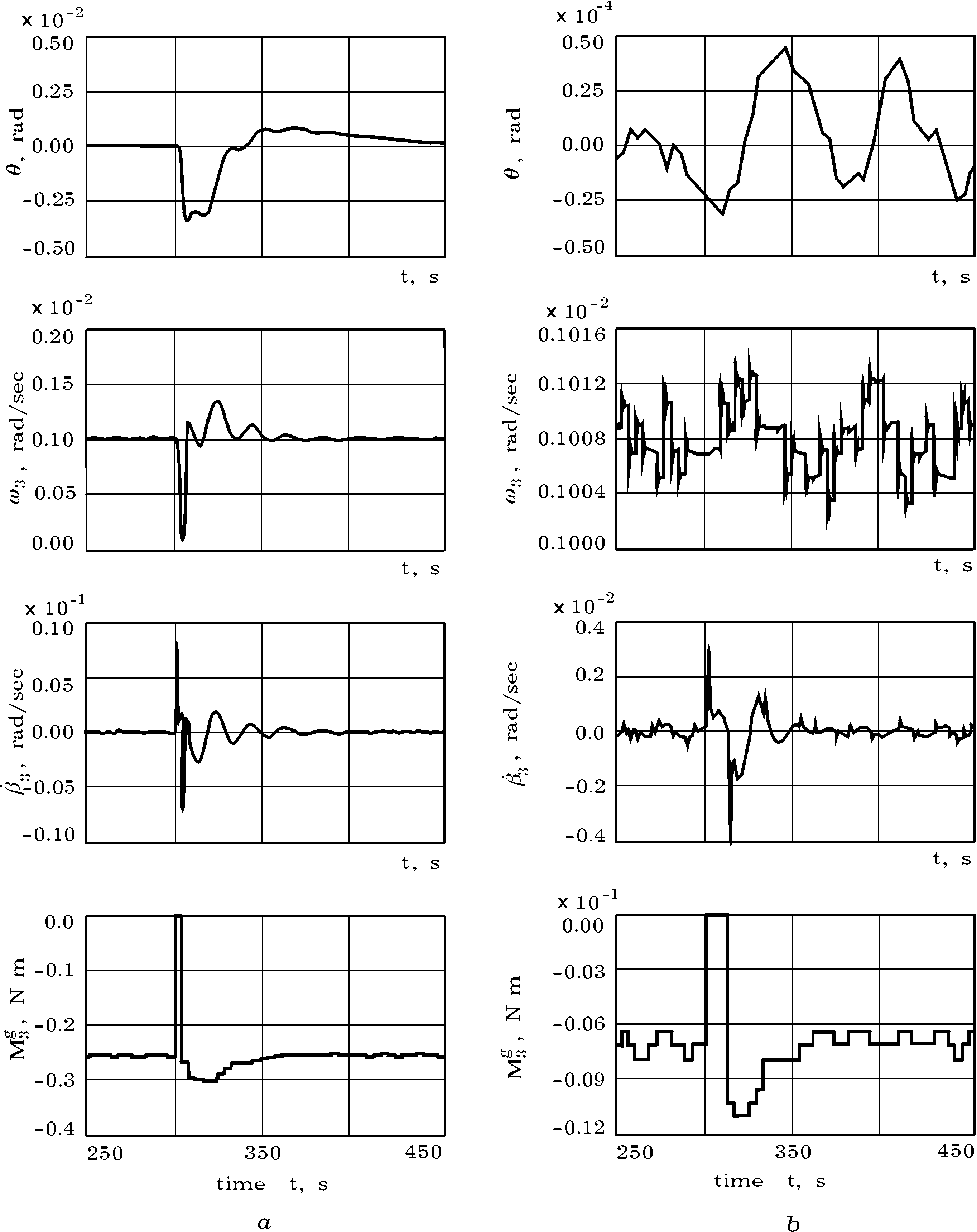
Рис. 3. Переходные процессы при отказе гиродина №3 в схеме 2-SPE
Заключение
Представлены приемы логико-динамического моделирования развития аварийных ситуаций, критерии диагностирования состояния, методы последовательной классифика- ции отказов приборов в контуре управления и реконфигурации управления в механических системах с избыточными гироскопическими связями. Приводятся некоторые результаты анализа гиросиловых отказоустойчивых систем управления ориентацией космических аппаратов. Полученные результаты эффективно использованы практически при создании гиросиловых отказоустойчивых систем управления ориентацией многих российских космических аппаратов [1], [8-10].
Работа поддержана РФФИ (04-01-96501 и 05-08-18175), Президиумом РАН (программа фундаментальных исследований 22) и Отделением энергетики, механики, машиностроения и процессов управления РАН (программы 16 и 18).
Список литературы Диагностика состояния и реконфигурация управления в механических системах с избыточными силовыми гироскопическими связями
- Somov Ye.I. Methods and software for research and design of the spacecraft robust fault tolerant control systems//Automatic Control in Aerospace 2001. Oxford: Elsevier Science, 2002.
- Frank P.M., Ding S.X., Marcu T. Modelbased Fault Diagnosis in Technical Processes//Transactions of the Institute of Measurement and Control. Vol. 22, no.1. 2000.
- Макаров В.П., Платонов С.Н. Элементы искусственного интеллекта в задаче обеспечения живучести системы ориентации ИСЗ//Динамика и управление космическими объектами. Новосибирск: Наука, 1992.
- Вальд А. Последовательный анализ. М.: Физматгиз, 1960.
- Фу К. Последовательные методы в распознавании образов и обучении машин. М.: Наука, 1971.
- Сомов Е.И., Бутырин С.А., Герасин С.А., Герасин И.А. Программное средство ДИНАМИКА в имитации гиросиловых отказоустойчивых систем управления ориентацией космических аппаратов//Навигация и гироскопия. 1999. № 42(25).
- Сомов Е.И., Бутырин С.А., Сорокин А.В., Платонов В.Н. Управление силовыми гирокомплексами космических аппаратов//Труды X Санкт-Петербургской Международной конференции по интегрированным навигационным системам. С.-Петербург: ЦНИИ "Электроприбор", 2003.
- Kozlov D.I., Anshakov G.P., Antonov Yu.G., Makarov V.P., Somov Ye.I. Precision flight control systems of Russian remote sensing spacecraft//Space Technology. Vol. 19, no. 3-4. 1999.
- Somov Ye.I., Butyrin S.A., Anshakov G.P., Makarov V.P. et al. Dynamics and flight support of a vehicle Ikar control system at orbiting Globalstar satellites//Control Engineering Practice. Vol. 11, no. 5. 2003.
- Раевский В.А., Курбатов Е.М., Сомов Е.И. Динамика гиросиловой системы управления ориентацией спутника связи Sesat: проектные данные и полетные результаты//Аэрокосмическое приборостроение. 2003. № 4.
