Динамическая модель механической трансмиссии автомобиля

Автор: Павловский Владимир Евгеньевич, Огольцов Виталий Николаевич
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 5-6, 2012 года.
Бесплатный доступ
В работе рассматривается построение системы управления нижнего уровня роботизированного автомобиля на основе автомобиля ВАЗ-21214 «Нива». Для этого разработана динамическая модель механической трансмиссии в среде MATLAB\Simulink. На основе модели спроектированы устройства управления и синтезирован алгоритм контроллера роботизированной трансмиссии. На основе модельных результатов сконструирована и установлена на серийный автомобиль разработанная система управления.
Роботизированный автомобиль, контроллер роботизированной трансмиссии
Короткий адрес: https://sciup.org/14967123
IDR: 14967123
Текст научной статьи Динамическая модель механической трансмиссии автомобиля
В настоящее время весьма актуальной является задача создания автономных транспортных средств. Такие автомобили призваны снизить загруженность дорог, заменить человека в опасных для жизни условиях, увеличить доступность автомобилей для людей с ограниченными физическими возможностями.
Еще в 1939 г. Норман Бел при поддержке компании General Motors на выставке Futurama представил «автомобиль будущего», полностью управляемый дистанционно. Такие автомобили должны были ездить по специально оборудованным полосам и полностью управляться автоматикой без вмешательства человека. И хотя авторы именно так представляли себе Нью-Йорк через 20 лет, задача создания полностью автономного транспортного средства для езды по дорогам общего пользования не решена до сих пор.
Активные научные исследования в представляемой сфере начались примерно в 80-х гг. прошлого века. Среди них необходимо выделить проекты – основоположники направления развития автономных автомобилей в Европе и США.
В Германии команда Bundeswehr University Munich под руководством Эрнста Дикманнса оборудовала фургон Mercedes-Benz системой компьютерного зрения. В ходе экспериментов автомобиль достиг скорости 100 км/ч на пустых улицах города. Разработки Дикманнса продемонстрировали надежность созданных систем автономного управления на трассах общественного пользования при наличии реального транспортного потока, в 1995 г. он проехал на автономной машине свыше 1758 км из Баварии в Данию, лишь по минимуму вмешиваясь в управление. Эта поездка явилась важнейшим событием в истории создания автономных автомобилей. Идеи аппаратного и программного обеспечения Дикманнса были скопированы для других исследовательских проектов, промышленных (Daimler-Benz), и теоретических (Мюнхенским техническим университетом). На рис. 1 показан один из автономных автомобилей Дикманнса – автомобиль VaMoRs.
Рис. 1. Автомобиль VaMoRs
Система управления верхнего уровня (СВУ)
Навигация в пространстве
Анализ ландшафта и препятствий
Анализ дорожной ситуации
Система управления нижнего уровня (СНУ)
Двигатель автомобиля
Рулевое управление
Трансмиссия (сцепление + КПП)
Принятие решений
Тормозная система
Планирование маршрута
Электрооборудование
Исполнение движения
Диагностика узлов

Рис. 2. Структура управляемого автомобиля
Эта разработка дала начало проекту EUREKA Prometheus (PROgraMme for a European Traffic of Highest Efficiency and Unprecedented Safety, программа для обеспечения высшей эффективности и беспрецедентной безопасности дорожного движения в Европе, 1987 – 1995 гг.).
В США объединенная команда из нескольких институтов (Carnegie Mellon University, Environmental Research Institute of Michigan, SRI) создала Autonomous Land Vehicle (ALV, автономное наземное транспортное средство). ALV был снабжен лазерным дальномером, системой компьютерного зрения и автономным роботизированным управлением, способным управлять автомобилем на скорости до 30 км/ч. Данный проект проходил при спонсорстве агентства DARPA Министерства обороны США.
Отметим среди таких проектов еще три. Это проект PATH California, проводимый Институтом изучения транспортных систем Университета Беркли в Калифорнии в сотрудничестве с Департаментом транспорта Калифорнии, в настоящее время проект имеет весьма широкую программу по управлению транспортом, безопасности и т.п. Это проект GoogleCar автоматического автомобиля корпорации Google и проект итальянской компании Vislab (при университете г. Пармы) по созданию автоматических электрических автомобилей на базе минифургонов Electric Porter Piaggio и дальнему туру этих автомобилей Италия – Китай в «почти автоматиче- ском режиме» (в первом автомобиле находился водитель). В этом пробеге автокараван прошел через Россию в 2010 г.
Традиционно системы автоматическо-го/автоматизированного автомобиля можно разбить на два больших класса: системы управления нижнего уровня (модификации подвергаются различные агрегаты автомобиля) и верхнего уровня (основная задача которых – частичное или полное исполнение функций водителя).
Системы управления нижнего уровня (в число которых входят, например, круиз-контроль, роботизированная трансмиссия, система противодействия заносу, антиблокировочная система) давно вышли за стены исследовательских лабораторий и устанавливаются практически на любом современном автомобиле. В то же время среди задач высокоуровневых систем, отвечающих за частичное или полное управление автомобилем (система автоматической парковки, следования за впереди идущим автомобилем, планирования и исполнения маршрута), еще очень много нерешенных.
Несмотря на то, что классы этих систем выполняют принципиально разные задачи, они преследуют одни и те же основные цели:
-
♦ повышение эффективности использования ресурсов (загруженность дорог, человеческое время, энергетические ресурсы);
-
♦ снижение нагрузки на водителя и перехват части выполняемых им функций;
-
♦ уменьшение количества возникающих на дороге аварийных ситуаций (ДТП).
В последнее время ежегодно проводится много исследовательских соревнований среди команд, занимающихся созданием беспилотных автомобилей, что еще раз подчеркивает значимость проблемы. Одними из наиболее известных в данной области являются DARPA Grand Challenge (управление автомобилем по пересеченной местности, 2004 и 2005 гг.) и DARPA Urban Challenge (беспилотный автомобиль для езды в городе, 2007 г.).
Последние три года аналогичные соревнования проводятся и в России [1]. Появляются публикации по созданию систем автоматизации для автомобиля [6]. Настоящая работа имеет целью представить разработки в этой области, выполненные в ИПМ им. М.В. Келдыша РАН.
Роботизированный автомобиль
Общая структура автомобиля как автоматически управляемого транспортного средства может быть представлена в виде схемы, изображенной на рис. 2 (в блоках СНУ и СВУ приведены примеры систем этих классов).
Данная работа относится к первому этапу создания такого автомобиля, на котором «роботизации» подвергаются системы управления нижнего уровня. В работе рассматривается трансмиссия автомобиля и создание ее роботизированного аналога.
При создании прототипа роботизированного автомобиля было принято решение использовать серийный автомобиль ВАЗ-21214 «Нива» с бензиновым двигателем типа «моновпрыск» объемом 1,7 л. Автомобиль оснащен 5-ступенчатой коробкой переключения передач и 2-ступенчатой раздаточной коробкой, дифференциал считается постоянно заблокированным. Выбор автомобиля с механической коробкой переключения передач (КПП) обусловлен следующими причинами:
-
♦ синтезированный алгоритм и устройства управления механической трансмиссией автомобиля предоставляют возможность построения серийного агрегата, относящегося к классу роботизированных КПП;
♦ существуют определенные сферы применения транспортных средств, где установка автоматических или роботизированных КПП невозможна по тем или иным причинам (сниженная ремонтопригодность, требования к нагрузкам на трансмиссию);
♦ решение задачи управления автомобилем с механической КПП позволяет создавать специально оборудованные автомобили для управления инвалидами или обучения вождению;
♦ использование автомобиля с заводской автоматической или роботизированной КПП добавляет лишние временные задержки, ухудшая реакцию всей системы, а также трудно поддается теоретическому анализу.
Динамическая модель механической трансмиссии автомобиля
Для изучения проблемы управления автомобилем с механической трансмиссией была разработана динамическая модель в среде MATLAB\Simulink с использованием библиотеки компонентов SimScape. Для задания характеристик модели использовались технические характеристики автомобиля ВАЗ-21214 «Нива» [2]. С помощью этой модели были решены следующие задачи:
-
1) изучение динамики автомобиля при заданном векторе управления трансмиссией;
-
2) подбор параметров отдельных узлов для достижения заданных характеристик устройств управления;
-
3) синтез алгоритмов контроллера трансмиссии.
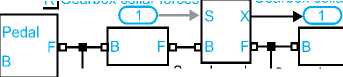
Общая схема динамической модели автомобиля с механической трансмиссией представлена на рис. 3 и состоит из следующих блоков:
-
♦ двигатель внутреннего сгорания (ДВС);
-
♦ механизм сцепления;
-
♦ первичный вал;
-
♦ коробка переключения передач (КПП);
-
♦ вторичный вал;
-
♦ раздаточная коробка;
-
♦ колесные оси (включая тормозные механизмы);
-
♦ привод тормозной системы;
-
♦ корпус и колеса автомобиля.
Модель имеет 4 входа (сигналы управления): положение дроссельной заслонки, усилие на педали сцепления и тормоза, вектор значений внешних сил (управляющего воздействия) на муфты синхронизаторов КПП. На выходе модели имеем: значение скорости вращения коленчатого вала двигателя, давление в тормозной системе, смещение муфт синхронизаторов КПП вдоль вторичного вала, скорость и положение автомобиля.
Для наблюдения за поведением модели также строятся следующие графики, не представленные в виде измеряемых величин на выходе модели: совместный график скоростей вращения (об./мин) коленчатого вала двигателя, а также первичного и вторичного валов; нормальная сила, действующая (по нормали) на диск сцепления; проскальзывание колес автомобиля по контактной поверхности.
Опишем кратко наиболее важные компоненты модели.
Двигатель внутреннего сгорания
Модель двигателя внутреннего сгорания, представленная на рис. 4 , состоит из трех функциональных блоков:
-
♦ компонент Generic Engine
-
♦ датчик скорости вращения выходного вала двигателя
♦ контроллер оборотов холостого хода. Внешние скоростные характеристики (ВСХ) двигателя внутреннего сгорания определяются по следующим уравнениям механики:
т = х pw .
Q o w ’
g ( Ц ) = P max X P ( w ); g ( Ц о ) = P nax >
Brake pedal (з)«
Brakes hydraulic pressure

Engine RPM

Clutch pedal
Base Shaft ^
Car engine
►
Gearbox collar forces
Pressure
RL
Pedal RR F
____FR
-I Real м ,
Primary shaft Speed gearbox
Secondary shaft
Clutch
Gearbox collar displacements
о
RL L RR D _

FL Position ►•(7)
FR w rr Velocity ►
Vehicle Velocity
Vehicle body
Vehicle position
Front
Transfer gearbox!
■o Base R

Рис. 3. Общая схема динамической модели автомобиля
Idle speed controller
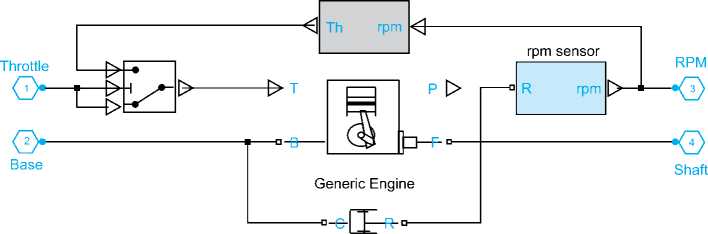
Rotational Damprer
Рис. 4. Двигатель внутреннего сгорания
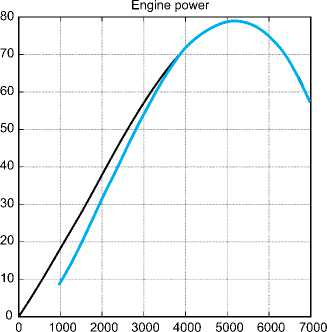
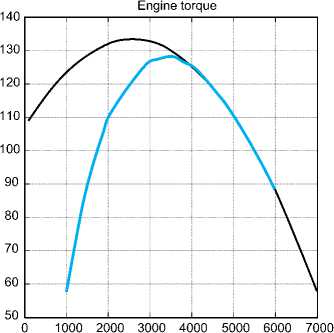
Рис. 5. Сравнение теоретических модельных (черные линии) и экспериментальных (синие линии) внешних скоростных характеристик для двигателя внутреннего сгорания
где Pmax – максимальное значение мощности двигателя; Ω 0 – обороты, на которых двигатель развивает максимальную мощность; g( Ω ) – максимальная мощность двигателя для заданных оборотов Ω, τ – крутящий момент на выходном валу двигателя. Функция p(w) есть характеристическая функция двигателя, удовлетворяющая условиям p(1) = 1 и dp/dw(1) = 0 .
Компонент SimDriveline Generic Engine (стандартный компонент SimDriveline) позволяет описать характеристики двигателя, предполагая:
p(w) = pvx w+p2 x w2 + p3 x w3;
px+2p, -3p3=0.
Для бензинового двигателя полагают p1 = p2 = p3 = 1 . Сравнение теоретических модельных ВСХ для данной модели показало серьезные несоответствия. Для параметризации компонента Generic Engine (стандартный компонент библиотеки SimDriveline) использовались данные экспериментальных измерений мощности и крутящего момента на валу двигателя автомобиля ВАЗ-21213 объемом 1,7 л [3]. Сравнение этих данных с показателями параметризованного по умолчанию компонента Generic Engine приведено на рис. 5 .
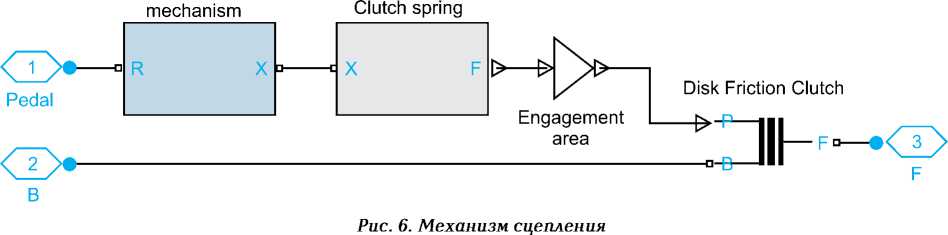
Механизм сцепления
Модель сцепления представлена на рис. 6 и также состоит из трех функциональных блоков:
-
♦ механизм привода сцепления;
-
♦ центральная нажимная диафрагменная пружина;
-
♦ механизм дискового сцепления.
Привод сцепления состоит из педали сцепления (вместе с возвратной пружиной), гидравлической передачи, вилки выключения сцепления и возвратной пружины вилки. Центральная нажимная диафрагменная пружина моделируется в виде пружины, сила упругости которой линейно пропорциональна деформации. В будущем планируется провести уточнение модели пружины в соответствии с моделью Belleville на основе теоретических и экспериментальных данных [4, 5].
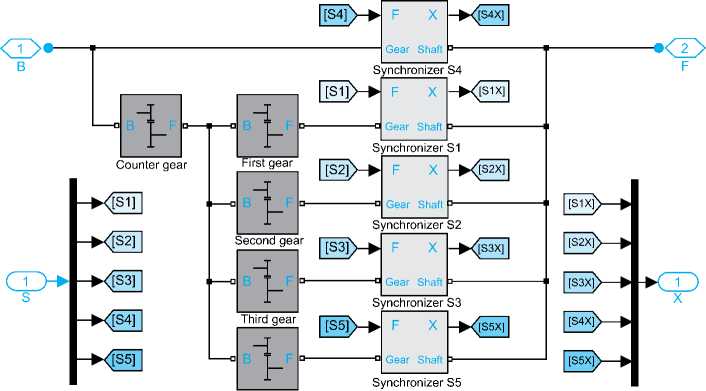
Механическая коробка переключения передач
Одним из центральных компонент трансмиссии является коробка переключения передач, схема модели которой представлена на рис. 7 . Прототипом для данной модели является КПП автомобиля ВАЗ 21214 «Нива» с небольшими упрощениями:
Clutch control
Fifth gear
Рис. 7. Коробка переключения передач
Корпус и колеса автомобиля
Для создания этого блока ( рис. 8 ) были использованы стандартные компоненты SimDriveline Vehicle Body и Tire (Magic Formula). Первый из них отвечает за расчет прижимной силы, действующей со стороны подвески на колеса, а также скорости автомобиля в зависимости от силы трения между колесами автомобиля и контактной поверхностью. Второй компонент моделирует упругое колесо автомобиля и вычисляет значение силы трения.
В данном компоненте возможно задание условий внешней среды: скорости встречного ветра и угла наклона контактной поверхности к горизонту.
Моделирование динамики автомобиля
-
♦ отсутствует задняя передача;
-
♦ каждый синхронизатор отвечает за включение ровно одной передачи;
-
♦ управление синхронизатором задается в виде модуля внешней силы, действующей на муфту синхронизатора параллельно вторичному валу КПП.
Заметим, что наличие задней передачи фактически не является необходимым для синтеза алгоритмов контроллера в силу двух факторов: передаточные числа первой и задней передач практически совпадают, в силу чего алгоритм управления автомобилем на задней передаче может быть получен из алгоритма управления на первой передаче; дополнительным условием для включе- ния задней передачи является полная остановка автомобиля (в силу отсутствия синхронизатора), что не является важным фактором для синтеза алгоритмов управления.
Наиболее важным компонентом модели КПП является блок синхронизатора [5], т.к. он отвечает за переходные процессы при переключении передач, поскольку включение передачи на реальном автомобиле никогда не происходит мгновенно и зависит от скоростей вращения входного и выходного валов КПП, а также от подаваемого управления; попытка включения передачи при отпущенном сцеплении является ошибочной ситуацией и должно быть соответствующе отображено в модели.
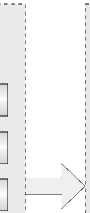
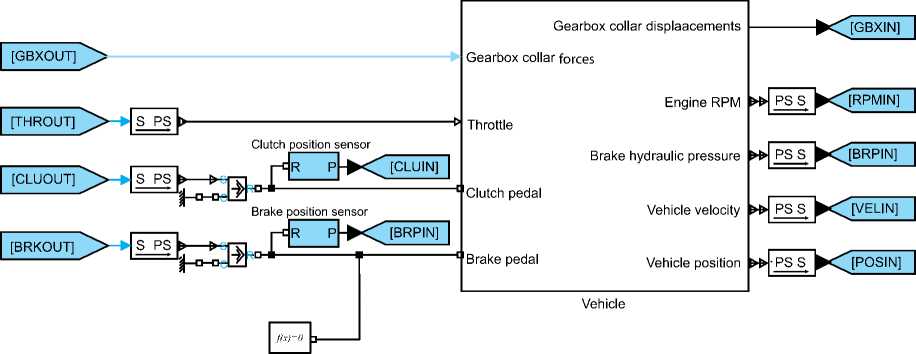
Модель автомобиля, представленная на рис. 3 , была оформлена в виде Simulink-подсистемы. На вход модели подается заданное заранее управление как функция времени, выходные сигналы модели выводятся на соответствующие графики. Полученная структура (схема представлена на рис. 9 ) была использована для верификации модели и подбора параметров устройств управления трансмиссией.
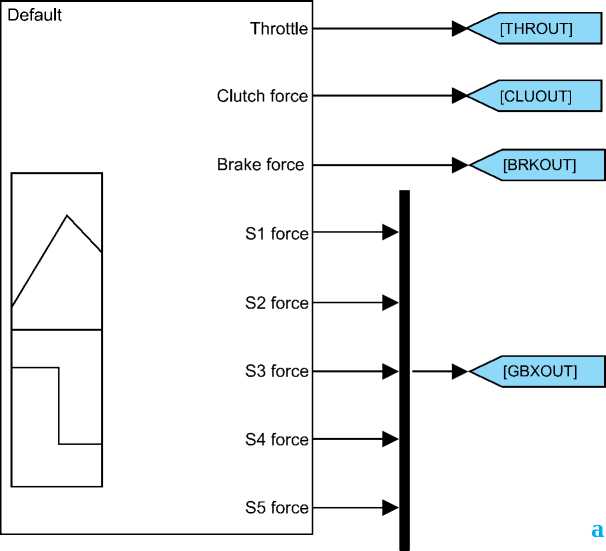
Управление моделью задается в виде графиков в компоненте Simulink Signal Builder. Пример такого управления, реализующего плавный старт автомобиля и разгон с переходом на
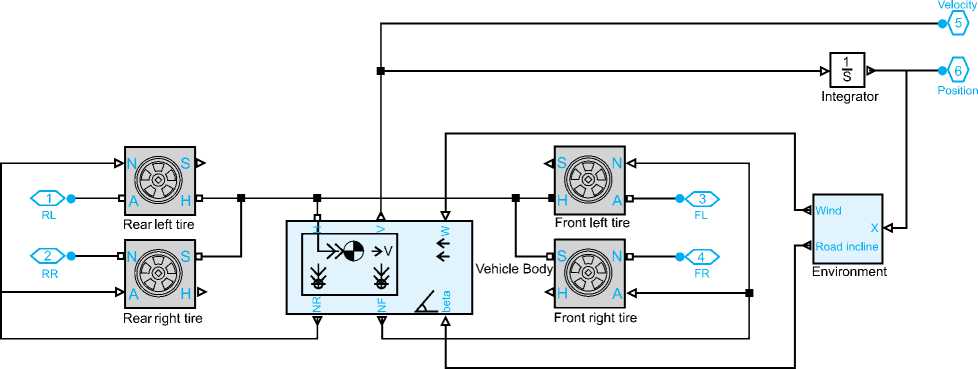
Рис. 8. Корпус и колеса автомобиля
II передачу, представлен на рис. 10 . Графики функций задают соответственно положение дроссельной заслонки (Throttle), усилие на педаль сцепления (Clutch force), усилие на педаль тормоза (Brake force), усилие на муфту синхронизатора I-й передачи (S1 force), усилие на муфту синхронизатора II-й передачи (S2 force).
По результатам моделирования могут быть построены, например, графики состояния автомобиля, представленные на рис. 11 –13 .
Данный подход к работе с динамической моделью использовался при
верификации модели и подборе ее характеристик для соответствия реальному автомобилю.
Устройства управления
Для корректной работы роботизированной трансмиссии необходимо обеспечить работу со следующими агрегатами автомобиля: двигатель внутреннего сгорания (скорость вращения выходного вала и управление подачей топлива); сцепление (позиционное управление); коробка переключения передач (выбор и включение передачи, информация о текущем положении муфт синхронизаторов).
Регулятор оборотов двигателя
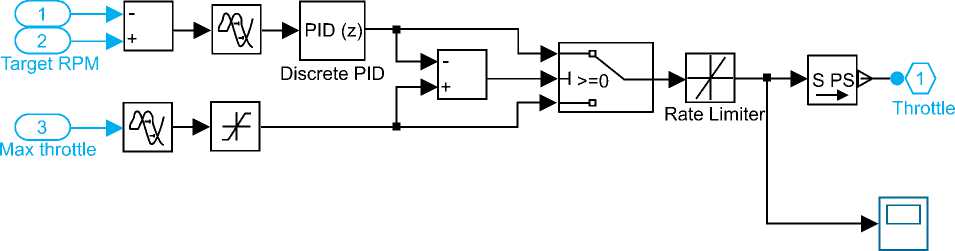
Для управления двигателем было разработан регулятор оборотов, модель которого представлена на рис. 14 . На вход регулятора подается 3 величины: текущее значение оборотов двигателя, целевое значение оборотов двигателя, максимальная мощность двигателя, которая при этом может быть задействована.
Центральным компонентом данного устройства является ПИД-регулятор, входом которого является разница между целевым и текущим значениями оборотов двигателя, а выходом – значение угла дроссельной заслонки.
В экспериментальном образце для управления заслонкой был использован шаговый двигатель, поэтому, исходя из параметров данного двигателя, в модели ограничена скорость изменения выходного сигнала регулятора.
Привод педали сцепления
Для управления сцеплением была разработана механическая платформа, состоящая из двигателя постоянного тока, ременной передачи и пары винт-гайка. Модель управления данной платформой представлена на рис. 15 .
Педаль сцепления с помощью троса крепится к блоку, передвигающемуся вдоль винта червячной передачи. При натяжении троса происходит нажатие педали сцепления, при ослаблении – педаль возвращается в исходное положение под действием возвратных механизмов сцепления. В качестве управления задается целевое положение педали сцепления, которое реали-
Solver Configuration
Рис. 9. а) блок задания управления; б) модель автомобиля с ручным управлением
б
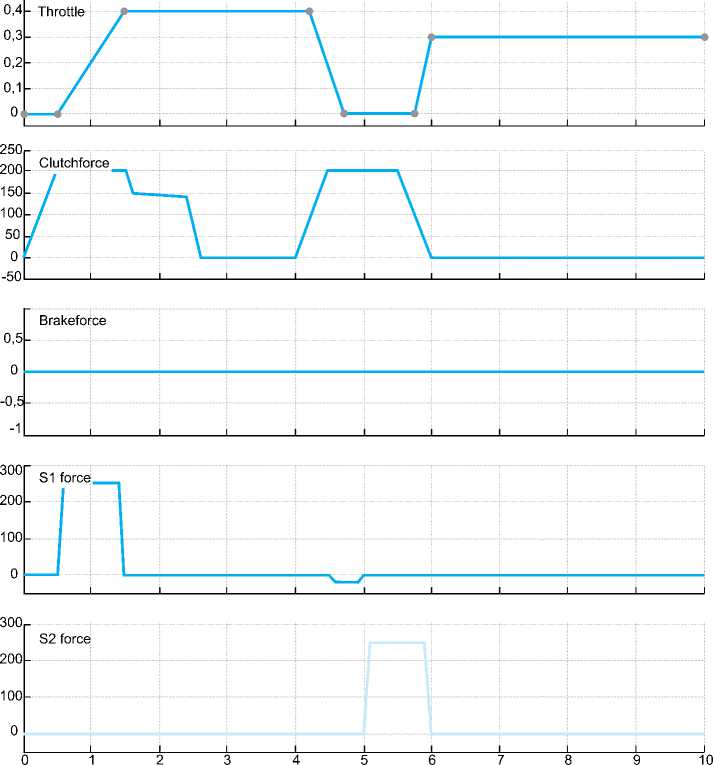
Рис. 10. Вектор воздействий на систему при ручном управлении
зуется с помощью ПИД-регулятора на контроллере привода.
Коробка переключения передач
В настоящее время механизм управления КПП находится на стадии проектирования, поэтому в модели управление происходит с помощью значений внешних сил, действующих на муфты синхронизаторов вдоль вторичного вала, а в качестве обратной связи получается точное значение смещения муфт синхронизаторов.
При работе с экспериментальным прототипом при переключении передач было принято решение реализовать следующий сценарий:
-
♦ контроллер трансмиссии нажимает педаль сцепления;
-
♦ на экран компьютера пилота выводится номер передачи, которую необходимо включить;
-
♦ пилот вручную переключает и подтверждает включение заданной передачи;
-
♦ контроллер трансмиссии отпускает педаль сцепления, автомобиль автоматически трогается.
Синтез контроллера трансмиссии

Рис. 11. Смещение педали сцепления при ручном управлении (см)
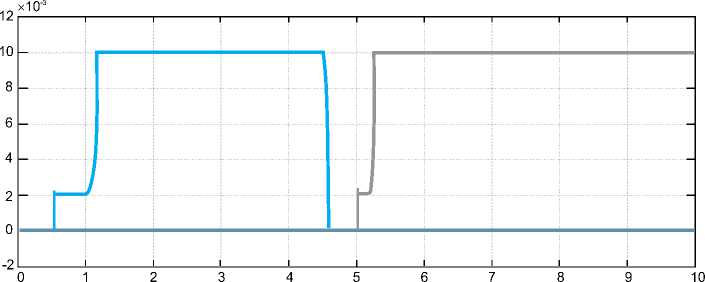
Рис. 12. Смещение муфт синхронизаторов КПП вдоль вторичного вала при ручном управлении (м)
Для синтеза контроллера трансмиссии были произведены следующие изменения в модели с ручным управлением ( рис. 9 ):
-
♦ были установлены устройства управления, описанные в предыдущем разделе;
-
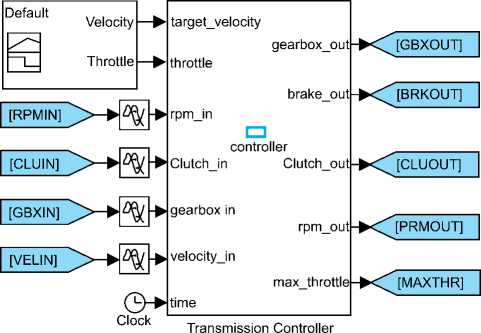
♦ создан (в виде MATLAB-функции) блок контроллера, работающий с частотой 100 Гц; на вход контроллера заведена информация о текущем состоянии автомобиля, а на выходе получаются сигналы для устройств управления;
-
♦ на передачу сигналов между всеми устройствами добавлена постоянная задержка 10 мс;
-
♦ управление контроллеру задается с помощью блока Signal Builder двумя параметрами: требуемая скорость автомобиля и ограничение используемой мощности двигателя.
Получившаяся модель изображена на рис. 16.
В качестве примера работы синтезированного алгоритма контроллера приведем следующий сценарий:
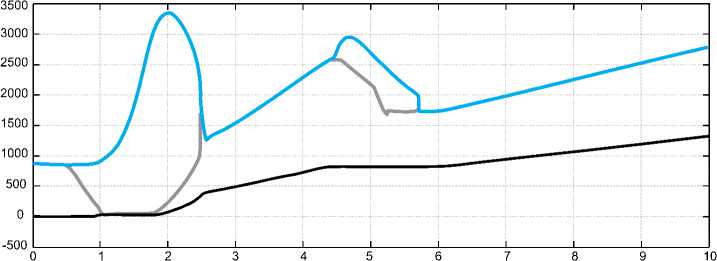
Рис. 13. Скорости вращения (об./мин) при ручном управлении: выходной вал двигателя (синий), первичный (серый) и вторичный (черный) валы
ручного управления. Регулятор оборотов двигателя использует шаговый двигатель для натяжения троса, идущего к дублирующему сектору газа, установленному на одной оси со штатным.
Как уже было сказано ранее, механизм управления сцеплением использует натянутый трос для нажатия педали. Идентичный механизм используется для управления педалью тормоза. Применение тросов для нажатия педалей позволяет водителю-испытателю в любой момент времени нажать их для из-
Engine RPM
throttle graph
Рис. 14. Регулятор оборотов двигателя
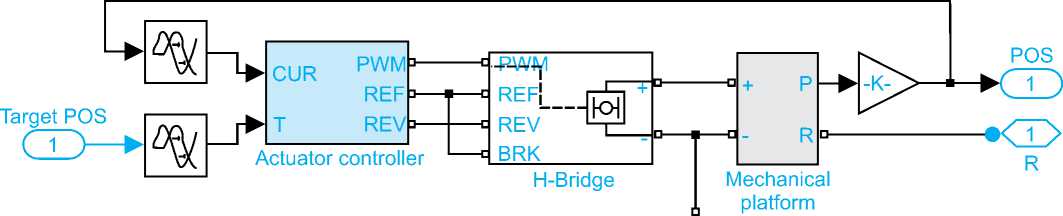
Рис. 15. Привод сцепления

-
♦ в начальный момент времени автомобиль находится в состоянии покоя, а скорость вращения выходного вала двигателя составляет 800 об./мин;
-
♦ контроллеру дано задание разгонять автомобиль до 15 м/с, открывая дроссельную заслонку не более чем на 35%.
Результаты моделирования этого сценария представлены на рис. 17 – 20 .
Эксперимент
По результатам моделирования были построены следующие устройства для управления автомобилем: автоматические регулятор оборотов двигателя автомобиля, приводы педалей сцепления и тормоза. Экспериментатор в любой момент времени может отключить установленные устройства управления, переведя автомобиль в режим бежания аварийной ситуации (например, столкновения).
Механизм управления КПП в настоящее время находится в разработке, поэтому в эксперименте переключение передач происходило следующим образом: в случае если контроллером трансмиссии принималось решение произвести переключение передач, контроллер, с помощью соответствующего устройства управления, выжи-
а
Gearbox collar displaacements
|[GBOXOUT]^ ----►I^J-
■> Gearbox collar forces
[RPMIN] [PRMOUT] [MAXTHR]
Engine RPM
Targel RPM Throttle
Throttle
Engine RPM
»»| PSS
JRPMIN] |
Max throttle ______
RPM regulator
| [CLUOUT]
Target POS P°S
[CLUIN] |
Brake hydraulic pressure
►^ PSS
'[BRPIN] |
Clutch actuator
Clutch pedal
Vehicle velocity
| [BRKOUT]
Target POS P^
[BRKIN] |
»| PSS
[VELIN] |
Brake pedal
Vehicle position
»|-PSS
[POSIN] |
Brake actuator

Solver Configuration
Vehicle
б
Рис. 16. а) блок контроллера трансмиссии; б) модель автомобиля с устройствами управления

Рис. 17. Смещение педали сцепления при автоматическом управлении

Рис. 18. Смещение муфт синхронизаторов I (черный), II (серый) и III (синий) передач при автоматическом управлении
мал педаль сцепления; одновременно с этим подавалось сообщение на экран компьютера с указанием, какую передачу необходимо включить; водитель переключал передачу с помощью ручки КПП и подтверждал переключение на компьютере; после получения подтверждения от водителя контроллер трансмиссии отпускал педаль сцепления; заметим, что алгоритм отпускания педали сцепления зависит от выбранной передачи, текущей скорости и оборотов двигателя.
В качестве механизма рулевого управления использован серийный электроусилитель руля (ЭУР) совместной разработки ОАО «АвтоВАЗ» и завода «Авиаагрегат» (Махачкала). В используемом ЭУР установлен контроллер собственной разработки, обеспечивающий позиционное управление рулем. Устройства управления по шине USB подключаются к ноутбуку, на котором реализован алгоритм контроллера трансмиссии. Контроллеру в режиме реального времени задаются характеристики требуемого движения: скорость движения автомобиля (м/с), максимальный угол открытия дроссельной заслонки и положение руля. С устройств снимаются и записываются в файл соответствующие диагностические данные.
На автомобиле были проверены алгоритмы плавного старта, разгона и торможения на первой передаче, а также переключения передач. Первые экспериментальные данные показали соответствие характеристик поведения управляющих устройств модельным.
Алгоритм контроллера, в базе своей, также доказал свою работоспособность на практике. Изменениям при переносе на реальный автомобиль подвергся алгоритм отпускания педали сцепления во время старта автомобиля, что было обусловлено использованием в диафрагменной пружине линейной модели вместо модели Belleville.
Выводы
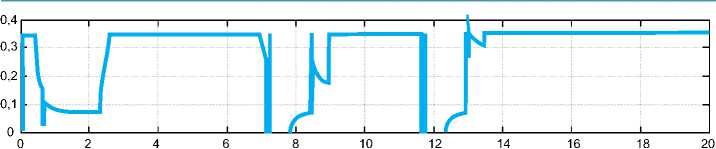
Рис. 19. Положение дроссельной заслонки при автоматическом управлении
В работе создана компьютерная динамическая модель автомобиля, позволяющая осуществлять достаточно точный анализ и синтез алгоритма контроллера трансмиссии. На основе анализа модели сконструированы и изготовлены отдельные устройства управления автомобилем.

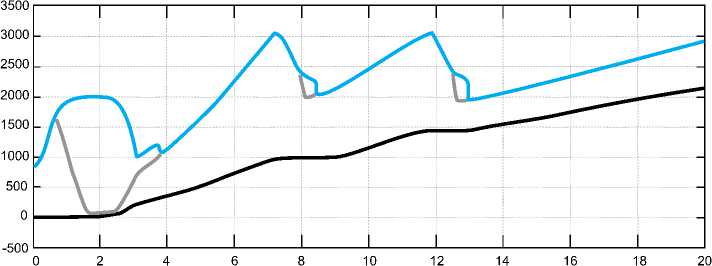
Рис. 20. Скорости вращения (об./мин) при автоматическом управлении: выходной вал двигателя (синий), первичный (серый) и вторичный (черный) валы
Для исследования задачи построения роботизированного автомобиля на их основе разработан и установлен в автомобиль программно-аппаратный комплекс. Реализация на нем синтезированных с помощью предложенной в работе динамической модели алгоритмов управления показала высокую степень применимости модели для этого класса задач. Автомобиль под управлением созданных устройств и алгоритмов обеспечивает точности движения не хуже, чем при управлении от человека. Динамика трогания и движения на низших передачах также сохраняется ■
Список литературы Динамическая модель механической трансмиссии автомобиля
- Соревнования автомобилей-роботов в России [Online]. URL: http://habrahabr.ru/post/144515/.
- РЕМОНТ ОБСЛУЖИВАНИЕ ЭКСПЛУАТАЦИЯ ВАЗ 21213, 21214 (Нива) [Online]. URL: http://www.autoprospect.ru/vaz/21213-niva/1-2-tekhnicheskie-kharakteristiki-avtomobilejj.html.
- ООО «Мастер Мотор». ВСХ двигателя ВАЗ-21213 1,7л [Online]. URL: http://www.mmotor.ru/cams/index.php?action=vsh&type=vaz&model=2101-2107&id=4.
- Vasca F. et al. Modeling torque transmissibility for automotive dry clutch engagement./2008 American Control Conference. Ieee, 2008. -№ 1. -P. 306 -311.
- Hillier V.A., Coombes P. Hillier’s Fundamentals of Motor Vehicle Technology. Nelson Thornes, 2004.
- Козорез Д.А., Кружков Д.М. Состав и структура автономных систем навигации и управления роботизированного прототипа автомобиля./Спецтехника и Связь, 2012. -№ 3. -С. 15 -18.
- Internal Combustion Engine with throttle and rotational inertia and time lag -Simulink R2012b Documentation [Online]. URL: http://www.mathworks.com/help/physmod/sdl/ref/genericengine.html
