Динамические характеристики развертывающего преобразователя с частотно-широтно-импульсной модуляцией

Автор: Дудкин Максим Михайлович, Брылина Олеся Геннадьевна, Цытович Леонид Игнатьевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Устройства аналоговой и цифровой электроники
Статья в выпуске: 3 т.14, 2014 года.
Бесплатный доступ
Рассматриваются динамические характеристики интегрирующего развертывающего преобразователя с частотно-широтно-импульсной модуляцией (РП-ЧШИМ) в широком частотном диапазоне входного гармонического сигнала, включая область частот замедленной дискретизации, когда высокочастотный сигнал преобразуется в составляющие, низкочастотный спектр которых находится в полосе рабочих частот системы управления.Показаны структурная схема, временные диаграммы сигналов, а также основные соотношения для статического и динамического режимов работы РП-ЧШИМ. Приведена методика анализа динамических характеристик. Результаты исследований представлены в виде пространств динамического состояния объекта. Обобщенная оценка и сопоставительный анализ динамики интегрирующего преобразователя производились по среднестатистическому отклонению коэффициента заполнения импульсов и частоты на пространстве динамического состояния объекта, рассчитанные в заданном диапазоне частот входного гармонического сигнала. Полученные характеристики выполнены в относительных единицах.Дан сравнительный анализ РП-ЧШИМ с характеристиками развертывающего преобразователя с широтно-импульсной модуляцией, в частности, построенного на основе выборки мгновенных значений сигнала управления, например, с ШИМ-1.Статья предназначена для специалистов в области теории управления, автоматизированного элекропривода и элементов систем автоматики, а также может быть полезна для магистров при изучении соответствующих дисциплин.
Развертывающий преобразователь, интегратор, релейный элемент, широтно- импульсная модуляция, частотно-широтно-импульсная модуляция, замедленная дискретизация, частота автоколебаний, среднестатистический коэффициент заполнения, пространство динамического состояния
Короткий адрес: https://sciup.org/147158273
IDR: 147158273 | УДК: 62-83:681.51(075.8)
Dynamic characteristics of scanning converter with pulse-width-frequency modulation
The paper considers dynamical characteristics of integrating scanning converter with pulse-width- frequency modulation (SC-PWFM) in wide frequency range of input harmonic wave including area of slow digitization frequencies when high-frequency signal is transformed to components with low-frequency spectrum that is within operating frequency band of control system.The paper presents block-diagram, timing waveform of signals, and main ratios for static and dynamical operating modes of SC-PWFM.The authors give technique of dynamical characteristic analysis. Research results are represented as dynamical state spaces of the object. Generalized estimation and comparative analysis were performed involving average deviation of coefficient of pulse and frequency stuffing on dynamical state space of the object calculated in the given range of input harmonic signal frequencies. Obtained characteristics are given in relative units.The paper presents comparative analysis of SC-PWFM with characteristics of scanning converter with pulse-width modulation, in particular, based on the sample of instantaneous values of control signal, for example, with PWM-1.The paper may be of interest for specialists in control theory, automated electric drive and automatic sys-tem elements. Also, the paper may be of use for masters studying corresponding disciplines.
Текст научной статьи Динамические характеристики развертывающего преобразователя с частотно-широтно-импульсной модуляцией
В системах управления электроприводами и технологической автоматики широко применяются информационные и силовые развертывающие преобразователи (РП), в основе которых лежит интегрирующая частотно-широтно-импульсная модуляция (ЧШИМ) [1–6]. В отличие от широтноимпульсной модуляции (ШИМ) [7–9] в системах с ЧШИМ не только коэффициент заполнения импульсов (скважность) γ = t 1 / T 0 , но и частота этих импульсов зависит от величины входного сигнала, уменьшаясь или возрастая с изменением последнего. Здесь Т 0 – период следования импульса длительностью t 1 . При этом наибольшее распространение получили РП с ЧШИМ (РП-ЧШИМ), где частота несущих колебаний системы уменьшается с ростом сигнала управления по квадратичному закону. Объясняется это тем, что техническая реализация подобной модуляции крайне проста, а диапазон регулирования, при котором обеспечивается устойчивая коммутация силовых ключей, практически не ограничен [10–13].
Базовая структура РП-ЧШИМ (рис. 1, а) включает в себя сумматор Σ , интегратор И с постоянной времени Т И и релейный элемент РЭ с порогами переключения ± b , выходной сигнал которого меняется дискретно в пределах ± А (рис. 1, в). Выходной сигнал интегратора И Y ( t ) имеет пилообразную форму (рис. 1, в) и ограничен по амплитуде на уровне ± b .
При отсутствии сигнала управления Х ВХ на выходе РЭ формируются импульсы Y ( t ) с γ = 0,5 (рис. 1, г). По мере роста сигнала Х ВХ (рис. 1, б) длительность одного из импульсов Y ( t ) увеличивается (рис. 1 в, интервал t 2 n - 1 ), а другого (интервал t 2 n ) – уменьшается.
При этом регулировочная характеристика γ = f ( Х ВХ ) линейна во всем диапазоне изменения сигнала управления (рис. 1, г), а модуляционная f = f ( Х ВХ) , в отличие от РП с ШИМ (рис. 1 д), носит квадратичный характер. Здесь
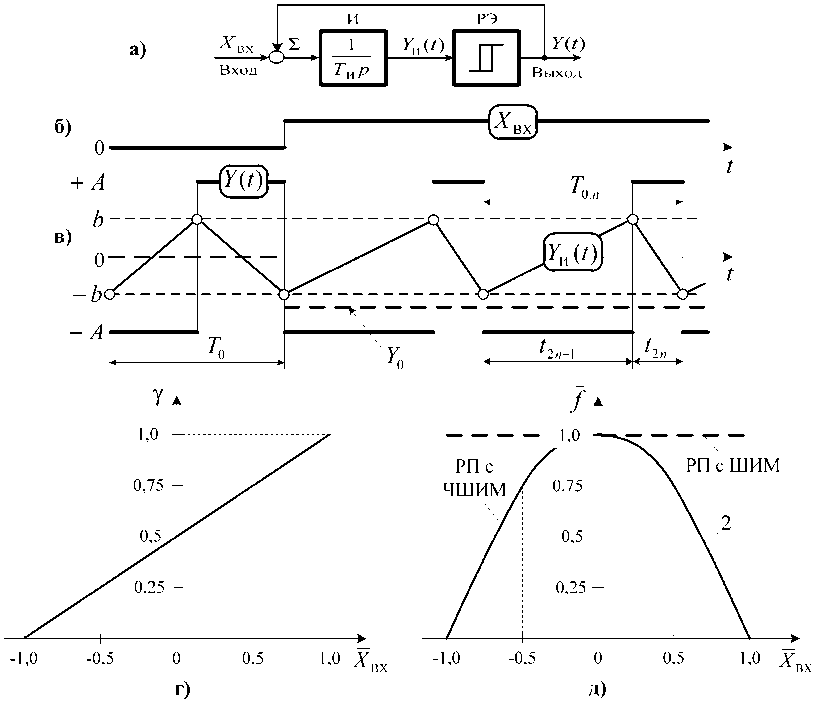
Рис. 1. Структурная схема (а), временные диаграммы сигналов (б), регулировочная (в) и модуляционная (г) характеристики РП-ЧШИМ
X ВХ = Х В ВХ !А — нормированная величина сигнала управления X В Х; / =[ f 0, n ( Х вх)/ f 0 ] - нормированное значение частоты выходных импульсов на n -м периоде их следования по отношению к частоте f 0 в случае X вх = 0 .
Статический режим работы РП-ЧШИМ описывается системой:
' 1 2 n — 1 = 0,5 7 0/(1 - X вх );
1 2 n = 0,5 7 ,/(1 + X вх );
7 0, n = 1 2 n - 1 + 1 2 n = 7 0/ (1 - X Вх );
7 = 4ЬТ и , f = 7 0/ 7 0, n = 1 - X Вх ;
y n = 1 2 n -1 / 7 ), n = 0,5(1 + X вх );
. Х вх = | Х вх/ А ; b = | Ь/Л |; n = 1, 2, 3, _ , где b = | b/А | - нормированное значение порогов переключения РЭ.
Динамические процессы, протекающие в РП-ЧШИМ в области достоверной передачи частот сигнала управления (ОДП), лежащей слева от критической частоты 0,5 f 0 , известной из теоремы отсчетов [14], достаточно хорошо теоретически и экспериментально исследованы [15–17].
Однако особый интерес представляет поведе- ние РП-ЧШИМ в малоизученной области замедленной дискретизации (ОЗД), когда частота динамического сигнала превышает значение 0,5 f0 , и высокочастотный сигнал преобразуется в составляющие, низкочастотный спектр которых находится в полосе рабочих частот системы управления [18, 19]. Это может явиться определяющим фактором не только ухудшения качества процесса регулирования, но и причиной отказов в работе всего технологического комплекса [20–22].
-
1. Методика анализа динамических характеристик
Анализ динамических характеристик проводился по методике, которая иллюстрируется диаграммами сигналов и блок-схемой этапов анализа на рис. 2. В ее основе лежит математическое моделирование состояния объекта на ЭВМ с использованием аппарата трансцендентных функций, представляющих модуляционные характеристики РП-ЧШИМ при воздействии на его вход постоянного Х ВХ и гармонического Х П( t ) в широком частотном диапазоне сигналов [10, 15].
При этом были приняты следующие допущения:
-
• функциональные блоки, входящие в состав РП-ЧШИМ, являются «идеальными» элементами,
Устройства аналоговой и цифровой электроники

б)
Рис. 2. Временные диаграммы сигналов (а) и блок-схема методики оценки динамических показателей РП-ЧШИМ (б)
а время смены знака выходного импульса РП-ЧШИМ равно нулю;
-
• коэффициенты передачи РП-ЧШИМ со стороны информационного входа для постоянной и переменной составляющих сигнала управления равны 1;
-
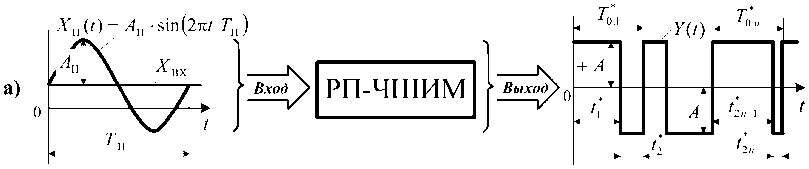
• гармоническая составляющая Х П( t ) = = A П sin( 2 π tIT П ) прикладывается на вход РП (рис. 2, а) в момент времени t = 0 начала очередного цикла развертывающего преобразования.
Анализ проводился в относительных единицах, что исключает влияние конкретных параметров функциональных блоков РП-ЧШИМ на вид получаемых характеристик. В качестве базовых приняты следующие величины:
-
• ± А – амплитуда выходных импульсов РП-ЧШИМ;
-
• частота f 0 (период Т 0) несущих колебаний РП-ЧШИМ при Х ВХ = Х П ( t ) = 0.
-
2. Динамические характеристики
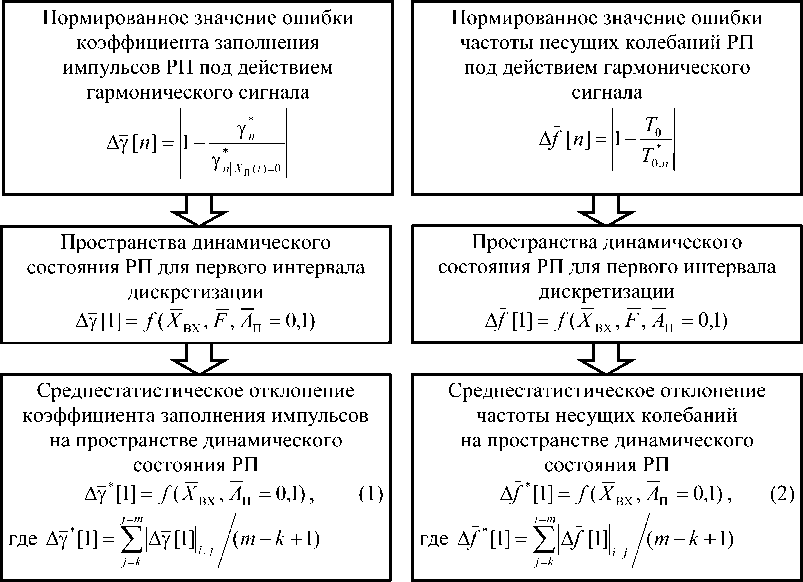
Методика анализа динамики РП-ЧШИМ иллюстрируется блок-схемой на рис. 2, б. Учи- тывая существенную нелинейность динамики развертывающих систем, полученные характеристики представлены в виде пространств динамических состояний Δγ [1] = f (XВХ, F, АП = 0,1) , Δf [1] = f (XВХ, F, АП = 0,1) для первого интервала дискретизации.
На рис. 2, б приняты следующие обозначения: X ВХ = Х ВХ IА – нормированная величина сигнала управления ХВХ; А П = А П IА – нормированная величина амплитуды сигнала Х П( t ); ± А – амплитуда выходных импульсов Y(t) РП-ЧШИМ; t 2 * n - 1 , t 2 * n – интервалы развертывающего преобразования при воздействии на вход РП-ЧШИМ гармонического сигнала Х П( t ); T 0 * , n – период интервала дискретизации выходных импульсов РП-ЧШИМ при воздействии на вход сигнала Х П ( t ); γ * n = t 2 * n - 1 T 0 * , n – коэффициент заполнения импульсов РП-ЧШИМ при воздействии на вход гармонического сигнала Х П( t );
F = Т о / Т п - нормированное значение частоты сигнала Х П (t); Т П – период гармонического сигнала Х П ( t ); n = 1, 2, 3,... - целое число, соответствующее порядковому номеру интервала дискретизации выходных импульсов РП-ЧШИМ.
Обобщенная оценка и сопоставительный анализ динамики РП-ЧШИМ производились по среднестатистическому отклонению коэффициента заполнения импульсов Ау * [1] и частоты A f * [1] на пространстве динамического состояния объекта, рассчитанные в соответствии с выражениями (1) и (2) на рис. 2, б в заданном диапазоне частот F .
РП-ЧШИМ
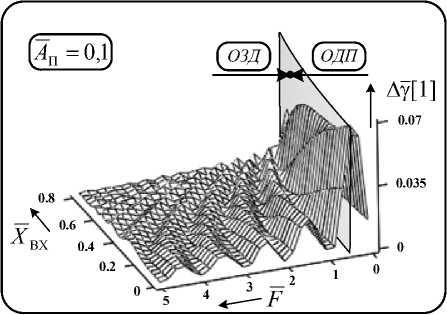
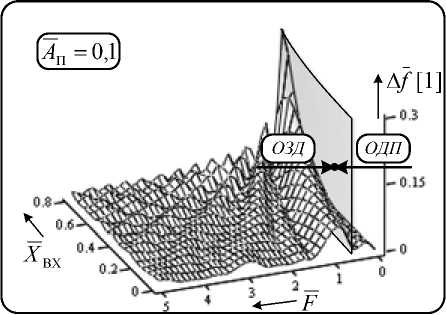
Временные диаграммы сигналов РП-ЧШИМ при гармоническом входном воздействии показаны на рис. 3. Решение в соответствии с системой уравнений (1), полученной на основе временных диаграмм сигналов РП-ЧШИМ (см. рис. 3), представлено в виде пространств динамических состояний РП-ЧШИМ: Ау [1] = f ( X ВХ , F , А П = 0,1) и A f [1] = / ( X В Х, F , А п = 0,1) на рис. 4.
Анализ полученных результатов позволяет сделать следующие выводы:
<
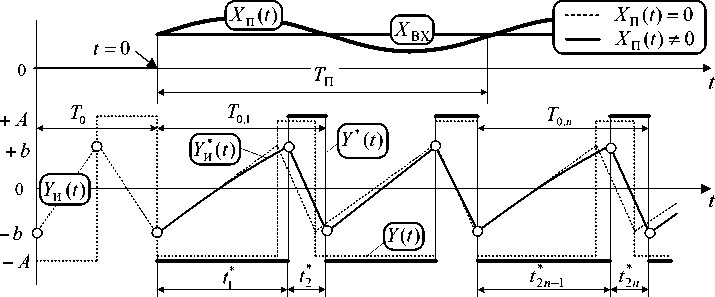
Рис. 3. Временные диаграммы сигналов РП-ЧШИМ при гармоническом входном воздействии
Ап tгn — 1 = T * 0,5 + ^sin
*
12n = T * 0,5
—
п F
А
П sin пF
( 5 п F
*
К t 2 n — 1
I T 0 \
i = 2 n — 2
+ 2 2 t *
i = 0
Х ВХ ) ;
( 5 п F
*
t 2 n
I T 0 \
+ 2
i = 2 n — 1
' 2 t *
i = 0
; t * = 0;
**
T0, n = t 2 n — 1
*
+ t 2 n ;
♦
Y n
= t 2 n — 1 !T0, n ;
Х ВХ
= I х ВХ/ А |; А П = А П/ А |; F = T 0 Т П;
Ау [ n ] = 1
—
♦
Y n
; A f [ n ] = 1
—
T 0
;
T o = 4 ЬТЙ; b = b!A\ ; n = 1, 2, 3, _
*
Y n ( A П = 0)
T 0 * , n
а) б)
Рис. 4. Пространства динамического состояния Ay [1] = f ( X ВХ, F , А П = 0,1) (а), A f [1] = f ( X ВХ , F , А П = 0,1) (б)
Устройства аналоговой и цифровой электроники
-
• Частотная область « F » интегрирующего РП-ЧШИМ, как и любой другой импульсной системы, делится на область достоверной передачи информации и область частот замедленной дискретизации, границей раздела которых является первый максимум пространств Δ γ [1] = f ( X ВХ , F , А П = 0,1) (рис. 4, а). Причем с ростом Х ВХ граница раздела ОДП и ОЗД смещается вправо по оси F , так как уменьшается частота несущих колебаний РП-ЧШИМ.
-
• В ОЗД с ростом нормированной частоты F сигнала Х П( t ) относительная ошибка коэффициента заполнения импульсов Δ γ [1] уменьшается (рис. 4, а), что является прямым следствием замкнутого характера структуры РП-ЧШИМ и наличия интегратора И в прямом канале регулирования (рис. 1, а). При этом для РП-ЧШИМ отсутствуют практические ограничения по верхнему диапазону F сигнала высокочастотной помехи. Здесь целесообразно напомнить, что в РП, построенных на основе выборки мгновенных значений сигнала управления, например, с широтно-импульсной модуляцией первого (ШИМ-1) или второго (ШИМ-2) рода [8, 18, 19], нормированная частота сигнала помехи не должна превышать значений F < 3,0 и F < 6,0 соответственно, так как в противном случае возникают «ложные» переключения развертывающего преобразователя, которые приводят к дополнительным переключениям силовых ключей и росту их коммутационных потерь. Режим, при котором наступает Δ γ [1] = 0 , является следствием того, что при определенном соотношении Х ВХ , A П и F ошибки преобразования на интервалах t 2 * n - 1 и t 2 * n , вызванные сигналом Х П ( t ), имеют разные знаки и взаимно компенсируются за период автоколебаний T 0 * , n .
-
• В РП-ЧШИМ ошибка Δ γ [1] уменьшается при возрастании Х ВХ (рис. 4, а). Данное обстоя-
- тельство объясняется тем, что с ростом уровня сигнала ХВХ происходит одновременное снижение частоты импульсов на выходе РП-ЧШИМ по закону f = 1 - XВ2Х . В результате при одном и том же значении F за один период T0*,n выходных импульсов РП-ЧШИМ «укладывается» большее количество положительных и отрицательных полуволн динамического воздействия ХП(t). Вследствие этого наблюдается их частичная или полная взаи-мокомпенсация и, как следствие, уменьшение ошибки Δγ [1] с ростом ХВХ .
-
• РП-ЧШИМ характеризуется отклонением частоты несущих колебаний от заданного значения (рис. 4, б). Наибольший уровень ошибки Δ f [1] ≈ 30 % наблюдается на границе раздела ОДП и ОЗД. При этом с ростом Х ВХ ошибка Δ f [1] возрастает. Происходит это вследствие того, что в интервале t 2 * n - 1 (рис. 3) увеличение постоянной составляющей сигнала управления Х ВХ эквивалентно ослаблению сигнала обратной связи в РП-ЧШИМ и росту относительного уровня сигнала Х П ( t ), когда развертка на выходе интегратора И оказывается более чувствительной к динамической составляющей Х П( t ). В ОЗД ошибка Δ f [1] монотонно убывает с ростом F , что объясняется интегрирующим принципом развертывающего преобразования.
-
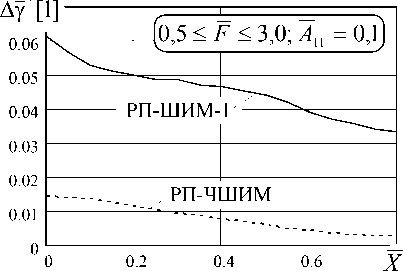
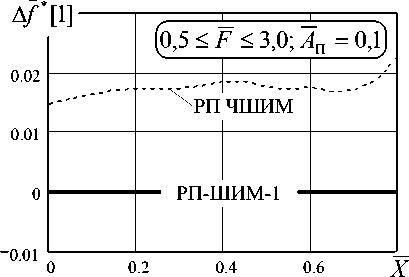
• РП-ЧШИМ по сравнению с РП, построенным на основе выборки мгновенных значений сигнала управления, например, с ШИМ-1, обладает повышенной помехоустойчивостью в ОЗД. Так, в диапазоне частот сигнала Х П( t ) 0,5 ≤ F ≤ 3,0 среднестатистическое отклонение коэффициента заполнения импульсов Δ γ *[1] при Х ВХ = 0 составляет 1,5 %, что примерно в 4 раза меньше, чем для РП с ШИМ-1 (рис. 5, а). Ошибка Δ f *[1] (рис. 5, б)
а)
Рис. 5. Среднестатистические ошибки коэффициента заполнения импульсов Ду [1] = f ( X ВХ) (а) и частоты несущих колебаний Д [1] = f ( X ВХ) (б) в ОЗД для РП различных классов
ВХ
б)
также является пренебрежимо малой величиной на фоне частоты несущих колебаний силовых преобразователей с ЧШИМ.
Заключение
-
1. Выполнен анализ динамических характеристик интегрирующего РП-ЧШИМ в ОДП и ОЗД.
-
2. Получены аналитические выражения для определения уровня ошибок коэффициента заполнения импульсов и выходной частоты РП-ЧШИМ в области частот замедленной дискретизации развертывающей системой гармонической составляющей входного воздействия.
-
3. Интегрирующий РП-ЧШИМ обладает высокой помехоустойчивостью и имеет наименьший уровень гармоник в ОЗД, который падает с ростом частоты гармонического сигнала, а также постоянной составляющей сигнала управления. Это является следствием замкнутого характера структуры РП и наличия интегратора в прямом канале передачи информации. Поэтому областью применения РП-ЧШИМ следует считать системы управления ВП с высоким уровнем помех в каналах передачи информации, что особенно актуально для систем автоматического управления с автономными источниками электропитания ограниченной мощности [11, 23–25].
-
4. С точки зрения энергетических показателей силовых вентильных преобразователей, применение РП-ЧШИМ, с одной стороны, усложняет задачу настройки параметров электромагнитного фильтра, применяемого для подавления высших гармоник в выходном сигнале ВП, но, с другой стороны, способствует уменьшению коммутационных потерь в силовых ключах в среднем на 20–40 % по сравнению с ШИМ [26].
Список литературы Динамические характеристики развертывающего преобразователя с частотно-широтно-импульсной модуляцией
- Частотно-широтно-импульсный терморегулятор сушильной камеры с непрерывным тестированием сопротивления изоляции электротехнического изделия/Л.И. Цытович, О.Г. Брылина, М.М. Дудкин и др.//Вестник ЮУрГУ. Серия «Энергетика». -2011. -Вып. 16, № 34 (251). -С. 50-55.
- Брылина, О.Г. Многозонный частотно-широтно-импульсный регулятор переменного напряжения/О.Г. Брылина, Л.И. Цытович, М.М. Дудкин//Энергобезопасность и энергосбережение. -2011. -№ 6 (42). -С. 35-39.
- Цытович, Л.И. Система управления асинхронным электроприводом водоснабжения жилого здания с автоматическим резервированием каналов регулирования/Л.И. Цытович, О.Г. Терещина, М.М. Дудкин//Проблемы энергетики: известия высших учебных заведений. -Казань: Изд-во КГЭУ, 2005. -№ 5-6. -С. 47-52.
- Цытович, Л.И. Система управления группой асинхронных электроприводов с самодиагностированием и автоматическим резервированием каналов регулирования/Л.И. Цытович, О.Г. Терещина, М.М. Дудкин//Электротехника. -2006. -№ 11. -С. 38-44.
- Система регулирования температуры и непрерывного контроля сопротивления изоляции электротехнических изделий в процессе их термической обработки/Л.И. Цытович, Р.М. Рахматулин, О.Г. Брылина и др.//Приборы и системы. Управление, контроль, диагностика. -2012. -№ 8. -С. 45-50.
- Усынин, Ю.С. Вентильный электропривод с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков//Электротехника. -2013. -№ 3. -С. 37-43.
- Управление вентильными электроприводами постоянного тока/Е.Д. Лебедев, В.Е. Неймарк, М.Я. Пистрак, О.В. Слежановский. -М.: Энергия, 1970. -199 c.
- Цифровые электроприводы с транзисторными преобразователями/С.Г. Герман-Галкин, В.Д. Лебедев, Б.А. Марков, Н.И. Чичерин. -Л.: Энергоатомиздат. Ленингр. отд-ние, 1986. -248 с.
- Электроприводы с синхронной реактивной машиной независимого возбуждения для станов холодной прокатки труб/Ю.С. Усынин, С.П. Лохов, М.А. Григорьев и др.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 17, № 16 (275). -C. 107-110.
- Дудкин, М.М. Элементы информационной электроники систем управления вентильными преобразователями: монография/М.М. Дудкин, Л.И. Цытович. -Челябинск: Издат. центр ЮУрГУ, 2011. -362 с.
- Частотно-широтно-импульсный адаптивный регулятор переменного напряжения с интегрирующей системой управления/М.М. Дудкин, О.Г. Брылина, Л.И. Цытович, А.В. Тюгаев//Вестник ЮУрГУ. Серия «Энергетика». -2013. -Т. 13, № 2. -С. 45-52.
- Система непрерывного контроля сопротивления изоляции электротехнических изделий в процессе их термической сушки/Л.И. Цытович, Р.М. Рахматулин, О.Г. Брылина, М.М. Дудкин//Промышленная энергетика. -2013. -№ 1. -С. 24-28.
- Синтез системы управления электроприводом с синхронной реактивной машиной независимого возбуждения/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 18, № 37 (296). -C. 38-41.
- Активные фильтры/Л.П. Хьюлсман; пер. с англ. под ред. И.Н. Теплюка. -М.: Мир, 1972. -516 с.
- Брылина, О.Г. Многозонные развертывающие преобразователи для систем управления электроприводами: монография/О.Г. Брылина, Л.И. Цытович. -Челябинск: Издат. центр ЮУрГУ, 2010. -232 с.
- Интегрирующие развертывающие преобразователи с повышенной температурной стабильностью характеристик/Л.И. Цытович, М.М, Дудкин, А.В. Качалов и др.//Приборы и системы. Управление, контроль, диагностика. -2010. -№ 10. -С. 38-43.
- Усынин, Ю.С. Частотные характеристики канала регулирования момента в синхронных электроприводах/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков//Электричество. -2012. -№ 4. -С. 54-59.
- Дудкин, М.М. Динамические спектральные характеристики развертывающих преобразователей с широтно-импульсной модуляцией/М.М. Дудкин, Л.И. Цытович, О.Г. Брылина//Практическая силовая электроника. -2012. -№ 4 (48). -С. 49-55.
- Дудкин, М.М. Спектральные характеристики развертывающих преобразователей с широтно-импульсной и частотно-широтно-импульсной модуляцией/М.М. Дудкин, Л.И. Цытович, О.Г. Брылина//Электротехника. -2013. -№ 10. -С. 18-25.
- Осипов, О.И. Техническое диагностирование автоматизированного электропривода постоянного тока: дис. … д-ра техн. наук/О.И. Осипов. -Челябинск: ЧПИ, 1995. -405 с.
- Дудкин, М.М. Исследование помехоустойчивости фазосдвигающих устройств для управления силовыми вентильными преобразователями/М.М. Дудкин//Электромеханика: известия высших учебных заведений. -Новочеркасск: Изд-во ЮрГТУ, 2008. -№ 4. -С. 35-39.
- Параметрическая оптимизация частотнорегулируемых электроприводов/Ю.С. Усынин, М.А. Григорьев, А.Н. Шишков и др.//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 18. -№ 37 (296). -С. 30-33.
- Реверсивный тиристорный преобразователь для систем управления с питанием от сети с нестационарными параметрами/Л.И. Цытович, Р.М. Рахматулин, М.М. Дудкин, А.В. Качалов//Практическая силовая электроника. -2009. -№ 2 (34). -С. 35-41.
- Адаптивная интервало-кодовая двоично-десятичная интегрирующая синхронизация систем управления силовыми вентильными преобразователями/Л.И. Цытович, О.Г. Брылина, М.М. Дудкин, Р.М. Рахматулин//Электротехника. -2013. -№ 3. -С. 8-15.
- Дудкин, М.М. Однофазные обратимые преобразователи напряжения для улучшения качества электрической энергии в сетях ограниченной мощности/М.М. Дудкин//Практическая силовая электроника. -2012. -№ 2 (46). -С. 19-27.
- Дудкин, М.М. Энергетические характеристики однофазных обратимых преобразователей напряжения с различными законами модуляции/М.М. Дудкин//Практическая силовая электроника. -2010. -№ 2 (38). -С. 25-32.
