Динамический расчет композитных стержневых систем при кинематических воздействиях

Автор: Мищенко Александр Викторович
Рубрика: Теория расчета строительных конструкций
Статья в выпуске: 3 т.15, 2015 года.
Бесплатный доступ
Рассмотрены способы построения решений задач динамики произвольных плоских композитных стержневых систем при термосиловом и кинематическом воздействиях с учетом геометрических начальных несовершенств. Кинематическое воздействие задано в форме динамических смещений части узлов системы и изменении обобщенных деформаций стержней. Решения построены с использованием тригонометрических рядов Фурье. Выполнены постановки задач регулирования состояния системы путем варьирования жестких и податливых обобщенных регуляторов.
Композитный стержень, слоистая структура, кинематическое воздействие, управляемая конструкция, регулятор напряженно-деформированного состояния
Короткий адрес: https://sciup.org/147154431
IDR: 147154431 | УДК: 624.048
Dynamic analysis of composite bar systems under the kinematic influence
The ways of finding solutions to the problems of dynamics of arbitrary plane composite bar systems under the thermal power and kinematic influence taking into account geometrical initial imperfections are considered. The kinematic influence is specified in the form of dynamic displacement of the subsystems parts and changes of generalized deformations of bars. The solutions are found with the help of trigonometric Fourier series. The tasks for the system state regulation by varying the stiff and flexible generalized regulators are formulated.
Текст научной статьи Динамический расчет композитных стержневых систем при кинематических воздействиях
Композитные стержневые системы относятся к разряду новых конструктивных систем, позволяющих при условии рационального проектирования создавать эффективные инженерные решения несущих конструкций, адаптированных к напряженно-деформированному состоянию, обладающими повышенной несущей способностью, жесткостью, трещиностойкостью при одновременном снижении расхода материалов. Однако в настоящее время в силу недостаточной изученности они пока не нашли широкого практического распространения.
В статье рассматриваются задачи динамического расчета произвольных плоских стержневых систем, образованных из неоднородных (композитных) профилированных стержней при комплексном воздействии, в котором наряду с наличием нагрузок и температурного поля, учитываются и кинематические факторы – заданные смещения некоторых узлов и (или) заданные обобщенные деформации некоторых стержней системы. Первое возникает в условиях «жесткого» нагружения, что наблюдается в случае значительного различия жесткостных характеристиках конструкции и взаимодействующих с ней объектов нагружения, при воздействии сейсмических сил, сил морозного пучения и т. п. Второе – при учете влияния внутренних кинематических факторов – случайных и детерминированных несовершенств, а также специально вводимых «регуляторов» состояния системы, применяемых в задачах регулирования и расчета управляемых конструкций [1].
1. Основные соотношения. Плоская стержневая система образована из прямолинейных ком- позитных стержней, имеющих неоднородную структуру [2] и формы поперечных сечений, показанные на рисунке. В системе координат xyz стержень обладает свойствами симметрии относительно плоскости xy – силовой плоскости, продольная ось совмещена с осью x . Материал каждой фазы представляет собой сплошную, однородную линейно вязкоупругую среду. Длина и характерный поперечный размер стержня удовлетворяют условию l > (5 + 6) h. Используется сдвиговая модель стержня Тимошенко.
Для стержневой системы, имеющей ns стержней и mu узлов, сформируем векторы: обобщенных концевых усилий S ( t ) и деформаций L ( t ) стержней (индексы: b – begin , e – end ), узловых динамических нагрузок F ( t ) и перемещений W ( t ) :
S ( t ) = [ S 1 . S y . S n s ] T,
S/ t ) = [ N M b M e ] T ,
L ( t ) = [ L . L y . L n s ] T ,
L/ t ) = [ A l 0 b 0 e ] T , (1)
F ( t ) = [ F 1 ™ F , ™ F „m ] T ,
F ; ( t ) = [ F x F y m ] T ,
W(t) = [w1 .„wi wmu ]T, w i (t) = [ wX wY Wp] T .
а)
б) в)
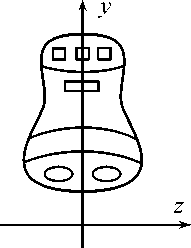
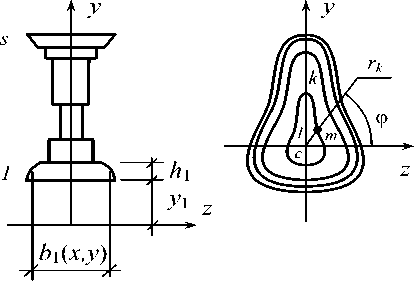
Поперечные сечения композитных стержней: общего вида (а), поперечно-слоистое (б), полярно-слоистое (в)
Для j -го стержня вектор S j содержит независимые компоненты концевых усилий, а вектор L j – полные (термосиловые) обобщенные деформации: удлинение A l и повороты 9 ь , 9 e концевых сечений.
Систему основных уравнений, состоящую из уравнений движения, геометрических и физических равенств, представим в виде [3]
AS ( t ) + F ( t ) = M w W ( t ),
< AтW(t) + L(t) + L + AL(t) = 0, (2) B-1 [L(t) - Lt ] + B. L(t) = S(t), где A – матрица преобразования силовых базисов концевых усилий в стержнях к глобальным осям, B = diag[B1...B n ] – матрица податливости по направлению обобщенных деформаций L , B V = diag[B V 1...BVn ] - матрица вязкой текучести по направлению скоростей L , MW – инерционная матрица системы; L , LT – векторы обобщенных геометрических несовершенств и свободных температурных деформаций со структурой, аналогичной вектору L, AL(t) - вектор регуляторов обобщенных деформаций, W – вектор узловых ускорений.
Система уравнений (2) может быть сведена к разрешающему дифференциальному уравнению в перемещениях
I R ' = R F (t) + R T + R 5 + R C (t) (3) r=0 dt с начальными условиями W(0) = W0 , W(0) = W0 . Здесь R0 = AB-1AT – матрица жесткости, R1 = ABV1AT - вязкого сопротивления, R2 - инерции; сумма векторов в правой части отражает воздействие внешних факторов: RF (t) = F(t) - динамических нагрузок, RC (t) = -A(B-1AL + B-1AL) -регуляторов обобщенных деформаций,
R T = - AB 1 L T - температуры, R 5 = - AB *L -геометрических несовершенств стержней системы.
2. Кинематическое воздействие в форме заданных динамических смещений узлов . Пусть среди m = m 0 + m 1 компонент вектора W ( t ) имеются m 0 компонент, изменяющихся по заданным законам и m 1 – искомых компонент свободных перемещений. Набор m 0 перемещений, с учетом структуры составляющих векторов w i ( t ) , может быть произвольным и иметь смысл поступательных перемещений узлов wX , wr и поворотов w ф . Перегруппируем элементы исходного вектора перемещений, объединив в блок W 0 заданные величины, а искомые - в блок W 1 : W ^ [ W 0 W 1 ] т. Обратный переход к исходным перемещениям может быть выполнен на основе преобразования
W = H w [ W 0 W ] т (4) при помощи адресной матрицы H W = { h j }, элементы h ij = {0; 1} которой отражают принадлежность (в случае h ij = 1) j -го элемента вектора
[ W 0 W 1 ] т i -му элементу вектора W . Перегруппи-
ровка перемещений приводит к разделению матричных коэффициентов и векторов воздействий в
(3) на блоки
R r ^
R r ,00 R r ,01
R r ,10 R r ,11
R ^
R 0
R 1
и записи системы уравнений (3) в виде
I R r,00
r = 0
^
I R r ,10
. r = 0
dr W 0 ( t ) dtr
+ I R r ,01
r = 0
( r = 0,1,2)
dr W 1( t ) dtr
= R q ( t ),
dr W q ( t ) + R dr W 1 ( t )
dt r 1 r 1 dt
= R 1 ( t ),
R i ( t ) = R fi ( t ) + R T + R&. + R a ( t ), ( i = 0,1).
Отсюда с использованием второго уравнения для функций свободных перемещений имеем дифференциальное уравнение t R,,, d^H = R,(t)(5)
r=0
R,(t) = R F,(t) + R T, + r51 + R C,(t) -tR r ,10 —77^ r=0
с заданными начальными условиями для W 1(0) , W 1 (0).
Решение однородной задачи, соответствующей (5), представленное в виде W , ( t ) = W e X t , W = [ £ , ... ^ l ]T , может быть построено известными способами на основе уравнения ( X 2 R 211 + X R ,,, + R o11) W = 0 с характеристическим равенством степени 2 m 1 относительно частотного параметра X
|X2 R 2,11 + X R 1,11 + R 0,111 = 0 .
Рассмотрим получение частного решения уравнения (5) при кинематическом воздействии в форме заданных смещений W0 и отсутствии дей- ствия регуляторов (AL(t) = 0). Правая часть при- нимает вид R,(t) = —tRr,10drW0(t)/dtr . Реше-r=0
ние будем искать в тригонометрической форме, представив векторы заданных и свободных перемещений в виде частичных сумм рядов Фурье с удержанием одинакового числа членов j 0
W 0( t ) = E ( C 0 7 c os j ® f t + S O j sin j ® ft ) , (6)
j = 0 j 0
W , ( t ) = t ( C , j cos j ® f t + S , j sin j Ю f t ) , (7)
j = 0
где to f = 2 л / T ; C Oj = [ c l j c 2 j ... c m , j ] T ,
Подстановка (6), (7) в (5) в рассматриваемом случае воздействия дает систему уравнений для векторов C , j , S , j в j -й гармонике ( j = 0,..., j 0)
( R 0,11 j 27 R 2,11) C 1 j + j to f R 1,11 S 1 j =
= - ( R 0,10 — j 2 ®/ R 2,10) C 0 j - j to f R 1,10 S 0 j , — j to f R 1,11 C 1 j + ( R 0,11 - j to f R 2,11) S 1 j = _= - ( R o,io - j2 to f R 2,1o ) S o j + j to f R 1,10 C 0 j
После нахождения перемещений W 1 ( t ) переход к исходной структуре вектора перемещений W ( t ) выполняется с помощью преобразования (4).
-
3. Воздействие регуляторов обобщенных деформаций A L ( t ). Данный вид воздействия отражает стационарное или динамическое изменение компонент вектора A L j ( t ) - удлинения A l ( t ) и (или) поворотов 9 b ( t ), 9 e ( t ) концевых сечений, что может быть реализовано в решениях прямых задач и задач регулирования НДС системы, когда посредством применения специальных жестких вставок в композитные стержни указанные деформации изменяются по заданной программе в управляющем блоке. Технически это может быть реализовано поворотными или поступательными устройствами на механической, гидравлической, электромагнитной и иных основах.
-
3.1. Случай упругоподатливых элементов, содержащих регуляторы, может быть исследован на основе дифференциального уравнения (5) с удержанием в правой части слагаемого R C ( t ) = — A ( B — 1 A L + B p -^L ). Формально с точностью до обозначений и размерностей векторов и матриц этот случай эквивалентен вышерассмотренному в п. 2 кинематическому воздействию. Применяя для A L аппроксимацию (6), а для W -(7), приходим к системе уравнений типа (8) относительно искомых числовых векторов, используемых в перемещениях узлов системы W .
-
3.2 . Построение решения на основе уравнения (5) при наличии жестких регуляторов, в силу вырождения для них матриц жесткости, требует применения специального алгоритма матричных блочных исключений.
При этом возможны два случая. В первом из них жесткие вставки занимают относительно небольшой объем в деформируемом элементе, что приводит к суммированию деформаций L + A L в геометрическом уравнении (2). Во втором – весь стержневой элемент является жестким регулятором с нулевой податливостью и деформацией L — L т = 0.
Пусть среди n = n h + n e компонент обобщенных деформаций системы nh компонент изменяются по установленным законам, представленными n h компонентами вектора A L ( t ). Число заданных таким образом компонент не должно превышать суммарного числа степеней свободы узлов системы ( n h < m ). В соответствии со структурой вектора L j (1) могут быть реализованы три типа стержней: нерастяжимые ( A l = 0 , 9 b * 0, 9 e * 0), неизгибаемые ( A l * 0 , 9 b = 0, 9 e = 0 ) и абсолютно жесткие ( A l = 0 , 9 b = 0 , 9 e = 0 ).
Перегруппируем компоненты в векторах обобщенных деформаций, переставив в начало блоки, соответствующие заданным деформациям. Также преобразуем и вектор усилий:
|
A L ^ |
rA L h 1 La l e J |
, L ( t ) |
~^ |
[ L h 1 L L e J |
|||
|
"L,." |
S ( t ) ^ |
F s |
1 |
||||
|
L ^ |
h * |
, |
. |
||||
|
L L e J |
L S |
e J |
|||||
, L T ^
L
L
Th
’
1 Te _
Аналогично преобразуем матрицу A ( m x n ) условий равновесия, B ( n x n ) - податливости и B V ( n x n ) - вязкой текучести системы (2)
A ^ [ A h A e ] , B ^
■ B h 0 1 . 0 B e J
,
B v ^
B Vh 0
0 B Ve
.
В последующем будем учитывать, что L h — L Th = 0, A L e = 0, B h = 0, B vh = 0.
Для обеспечения возможности последующих блочных исключений выделим из матрицы коэффициентов [ A h A e ] уравнений движения квадратный невырожденный блок A hh , применив процедуру Гаусса с nh шагами и перестановкой строк. В результате получим следующие перегруппировки векторов и матриц
M
M
hk
’
- kk J
Здесь первый индекс обозначает число строк, а второй – число столбцов с использованием соответствия h о nh, e о ne, k о nk . В результате преобразований (9)–(10) три уравнения (2) приобретают структуру
••
••
A hh S h + A he S e + F = M hh Wh + M hk Wk ,
••
••
I A kh S h + A ke S e + F k = M kh Wh + M kk Wk , A hh W h + A kh W k + L h + L Th + A L h = 0, A he W h + A ke W k + L e + L e = 0,
B — ‘ ( L e — L Te ) + B — 11L e = S e .
системы
Исключив из (11) S h и выразив из (12) W h , а из (13) – S e , получим
M kkWk + M kh W h + ( A ke
—
A kh A hh A he ) S e + R kF = 0,
. W h =— ( A hh ^( A k ,W k + L h + L Th +A L h ), S e =— B e — 1( A T e W h + A L W k + L e + L Te ) — _ - B v 1 ( A т e W h + A ke W k ).
Наличие nh жестких элементов уменьшает на nh число степеней свободы системы, вследствие чего вектор перемещений W будет содержать подвектор Wh зависимых компонент. Выполнив ис- ключение векторов Wh и Se из системы (14), окончательно получим дифференциальное уравнение второго порядка в перемещениях, аналогичное (5):
f R.d^ = R. (t),(15)
r ,kk r r=0
~ . . ____ . . ____ ____ . .
Rk (t) = RkF (t) + RkT + Rk5+ RkCL (t)
с матрицами жесткости R 0, kk , вязкого сопротивления R 1, kk и инерции R 2, kk по направлению независимых компонент вектора W k и его производных: —
R 0, kk = M kk — M kh ( A hh ) A kh ,
R 1, kk = V kk — V kh ( A hh ) A kh , 6 5 l А т k—1 Ат
R2,kk = Rkk Rkh (Ahh ) Akh с компонентами вектора свободных членов (16), отражающими силовое, температурное воздействия, наличие начальных несовершенств и жестких регуляторов обобщенных деформаций
R kF ( t ) = — F k ( t ) + A kh A hh F h ( t ),
R kT = ( A ke — A kh A hh A he ) B — 1 L Te — R kh A hh L h ,
R k 5 = ( A ke — A kh A hh A he ) B — 1 L e — R kh Ahh L h ,
R kCL ( t ) = — M kh ( A T h ) — 1 A L h —
- V kh ( A T h ) — 1 A L h — R kh ( A T h ) — 1 A L h .
В уравнении (15) использованы редуцированные инерционные матрицы M по направлению ускорений W k , W h , редуцированные матрицы вязкого сопротивления V по направлению скоростей W k , W h , редуцированные матрицы жесткости R по направлению перемещений W k , W h : —
M kk = M kk — A kh A hh M hk , -„ —
M kh = M kh — A kh A hh M hh ,
V kk = ( A ke — A kh A hh A he ) B V1ATke ,
V kh = ( A ke — A kh A hh A he ) B V\ A he , R kk = ( A ke — A kh A hh A he ) B — ‘A ke , R kh = ( A ke — A kh A hh A he ) B e — ‘ A hee .
Решение уравнения (15) при кинематическом воздействии R kCL ( t ) может быть выполнено по схеме, рассмотренной в п. 2. Для этого, записав аппроксимацию (6) для вектора A L h , а (7) - для W k , приходим к системе уравнений типа (8) для искомых числовых векторов в (7).
Если nh < m, то, как следует из рассмотренных выкладок, в композитной системе могут быть заданы произвольные обобщенные деформации ALh. В случае если число жестких элементов nh > m получаем переопределенную систему, для которой условия совместности в (2) не могут быть выполнены при произвольных компонентах ALh . При nh = m блочные исключения не требуются, а искомые перемещения могут быть найдены сразу из кинематических соотношений (2) при L( t) - LT = 0
W ( t ) = - ( A t) - 1[ L + L T + A L ( t )].
-
4. При использовании упругоподатливых регуляторов A L может быть поставлена задача ограничения общей жесткости системы
I W ( t )| = | f w [ A L ( t )]| < W adm , (17) где W adm – вектор нормируемых величин узловых перемещений. Условие (17) в пространстве компонент вектора A L задает области допустимых состояний системы.
Рассмотрим постановку динамической задачи проектирования композитной системы с заданными стационарными узловыми перемещениями , что соответствует выполнению условия (17) в форме строгого равенства. Примем число упругоподатливых регуляторов в дифференциальном уравнении типа (5) равным n h = m < n . Считая фазу переходных процессов с наличием собственных колебаний завершенной, обратимся к частному решению системы уравнений. При реализации стационарных перемещений W ( t ) = W adm уравнение (5) принимает вид
R o W adm = F ( t ) - AB - 1 L T - AB - 1 L -
-
- A [ B - 1 A L ( t ) + B ^ -1 A L ( t )].
Отсюда получаем систему дифференциальных уравнений первого порядка нормального вида относительно искомых компонент вектора регуляторов обобщенных деформаций A L ( t )
— A L ( t ) = G A L ( t ) + Go ( t ), (18) dt 0
G = -Bv B-1, с вектором внешних воздействий Go (t) = BV A-1 [F(t) - RoWadm ] - BVB-1 (IL - Lt ).
Методы решения таких систем известны. В частном случае, полагая в (18) W adm = 0, имеем задачу регулирования деформируемой композитной системы с неподвижными узлами .
Выводы. Изложенные способы матричных расчетов композитных стержневых систем при термо-силовом и кинематическом воздействиях могут быть применены для широкого круга практических приложений, в постановках прямых и оптимизационных задач композитных стержневых систем, в частности:
-
а) при горизонтальных сейсмических воздействиях, возникающих в результате распространения в грунтовой среде продольных волн растяжения–сжатия. Для этого в векторе W ( t ) учитываются компоненты wX ( t ) перемещений опорных узлов. Аппроксимация (6) позволяет каждую из них задать различными функциями времени, что дает возможность описать прохождение сейсмической волны по протяженному сооружению;
-
б) при вертикальных сейсмических воздействиях, возникающих в результате распространения поперечных волн, сопровождающихся деформациями сдвига грунтовой среды и искривлением земной поверхности. В этом случае в опорных узлах учитываются компоненты wY ( t ) , а при необходимости и повороты н ;р ( t );
-
в) в задачах статического и динамического регулирования напряженно-деформированного состояния системы. В этом случае с использованием ограничений, формируемых для свободных перемещений W 1 , обобщенных деформаций L , усилий S (а также – для соответствующих величин в промежуточных сечениях композитных стержней, определяемых через компоненты указанных векторов) устанавливаются условия регулирования для варьируемых перемещений W 0( t ) , обобщенных деформаций A L h ( t ).
Работа выполнена при частичной финансовой поддержке РФФИ, проект 14-01-00102.
Список литературы Динамический расчет композитных стержневых систем при кинематических воздействиях
- Абовский, Н.П. Управляемые конструкции: учебное пособие/Н.П. Абовский. -Красноярск: КрасГАСА, 1998. -433 с.
- Мищенко, А.В. Способ формирования нелинейных физических соотношений в прямых и обратных задачах расчета многофазных стержней/А.В. Мищенко//Вестник ЮУрГУ. Серия «Строительство и архитектура». -2014. -Вып. 14. -№ 3. -С. 12-16.
- Мищенко, А.В. Динамика слоистых рам из разносопротивляющихся материалов/А.В. Мищенко, Ю.В. Немировский//Известия вузов. Строительство. -2011. -№ 11. -С. 10-19.
- Фихтенгольц, Г.М. Курс дифференциального и интегрального исчисления/Г.М. Фихтенгольц. -М.: Наука, 1969. -Т. 3. -656 с.
