Динамический расчет подкрановой фермы при конструктивно нелинейной работе ее элементов

Автор: Потапов Александр Николаевич, Зямбаев Никита Александрович
Рубрика: Теория расчета строительных конструкций
Статья в выпуске: 3 т.15, 2015 года.
Бесплатный доступ
Рассматривается временной анализ конструктивно нелинейных систем при действии динамических нагрузок. Приведены теоретические основы метода, представлена система разрешающих уравнений задачи. Приведен пример динамического расчета двухпролетной металлической подкрановой фермы при ее полном разрушении от действия аварийной нагрузки от мостового крана вследствие обрыва стропа груза. Произведено сравнение предложенной методики с традиционными методами расчета. Обоснована точность решения задачи с помощью метода временного анализа.
Метод, временной анализ, математическая модель, колебания, динамическая реакция, конструктивная нелинейность, аварийное воздействие, мостовой кран, подкрановая ферма
Короткий адрес: https://sciup.org/147154427
IDR: 147154427 | УДК: 624.04;
Dynamic analysis of crane truss in case of constructively nonlinear operation of its elements
The paper deals with time analysis of constructively nonlinear systems under dynamic load. The theoretical basics of the method are given. The system of resolving equations of the problem is presented. The authors provide an example of dynamic analysis of a two-span metallic crane truss in case of its complete failure from the emergency load of the bridge crane as a result of the load sling abruption. The proposed method is compared with traditional calculation methods. The accuracy of the problem solving using the time analysis is justified.
Текст научной статьи Динамический расчет подкрановой фермы при конструктивно нелинейной работе ее элементов
Работа строительных конструкций при запро-ектных воздействиях (в виде ударов и импульсов) представляет повышенный интерес специалистов, так как это связано с проблемой надежности и безопасности сооружений, широко обсуждаемой в последнее время в научно-технической литературе [1–3].
Крановые нагрузки относятся к категории силовых воздействий и оказывают значительное влияние на конструкции производственных зданий. В соответствии с Европейскими нормами EUROCODE 1[4] эти нагрузки подразделяются на постоянные, переменные и аварийные. В зависимости от грузоподъемности крана сосредоточенная сила от колеса на подкрановую конструкцию (балку или ферму) может достигать 1000 кН и более.
Аварийные воздействия, возникающие при работе крана, могут создаваться от удара крана о тупиковые упоры либо при его наезде с грузозахватным устройством на препятствие. Кроме того, возможны аварийные ситуации, связанные с разгибом крюка или разрывом стропа, приводящие к падению груза при движении крана. В последнем случае вертикальная нагрузка на колесо крана имеет вид импульсных сил, амплитуда которых вследствие динамического характера воздействия может превышать статический эффект в 2–3 раза.
В статье приведены математические модели расчета конструкции с разрушающимися связями при аварийном воздействии. Для определения динамической реакции поврежденной конструкции используется метод временного анализа, основанный на исследовании характеристического матричного квадратного уравнения и приводящий в рамках принятых моделей к замкнутому решению во временной области [5]. При этом система рассматривается как конструктивно нелинейная, поскольку при внезапном выключении несущих элементов из работы происходит изменение параметров расчетной динамической модели (РДМ) со- оружения. В отличие от статической задачи изменяются не только жесткостные, но и инерционные и демпфирующие характеристики.
Уравнение движения дискретной диссипативной системы (ДДС) с учетом действия статической нагрузки (1, а)и начальные условия (1, б) записываются так:
MY ( t ) + CY ( t ) + KY ( t ) = P ( t ) + Q , (а)
Y ( t 0 ) = Y o , Y ( t 0 ) = Y o , (б)
где M = diag ( m 1 ,..., m ), C = С Т , K = K T e M n ( R ) - матрицы масс, демпфирования и жесткости; Y ( t ), P ( t ), Q – векторы перемещений и внешней нагрузки (динамической и статической).
Характеристическое матричное квадратное уравнение для однородного ОДУ, соответствующего (1, а), представляется в виде
M i S i 2 + C i S i + K i = 0 . (2)
Из этого уравнения отыскиваются два матричных корня S 1 2 e M n ( C ), которые позволяют определить все параметры собственных колебаний ДДС (частоты, коэффициенты демпфирования и формы колебаний) и сформировать фундаментальные решения, входящие в общий интеграл однородного ОДУ: Ф 1 ( t ) = e S , Ф 2( t ) = Ф 1 ( t ). При решении упругой задачи матричные корни обладают свойством сопряженности.
Система разрешающих уравнений задачи с начальными условиями (1) на интервале t e [ 1 0; t a ]
имеет вид:
Y ( t ) = 2Re{ Z ( t )};
'Y ( t ) = 2Re{ SZ ( t )}; (3)
Y ( t ) = 2Re{ S2 Z ( t )} + M -1 [ Q + P ( t )].
'Z ( t ) = Z o ( t - t 0 ) + Z Q ( t - t 0 ) + Z p ( t - t 0 );
Z о ( t - t 0 ) =Ф ( t - t о )U -1 Mz [ - SY o + Y 0 ];
Z Q ( t - t 0 ) = [ Ф ( t - t 0 ) - e ](US ) - 1 Q ; (4)
Z P ( t - t 0 ) = { S [ Ф ( t - t 0 ) sin( 0 t 0 ) -
- E sin( 0 t )] + [ Ф ( t - t 0) cos( 0 t 0) -
_ - E cos( 0 t )] 0 }[ U ( S 0 2 + E 0 2 )] -1 P0.
Здесь U = MS + S T M + С . Вектор Z p ( t - 1 0 ) записан для случая действия синусоидального импульса P ( t ) = P0 sin(0 1 ), где Р 0- вектор амплитуд импульсной нагрузки; 9 = п / t a - длина импульса; Е – единичная матрица. После завершения действия импульса (при t > t a ) система совершает свободные колебания, поэтому в (4) необходимо положить Z p ( t - 1 0 ) = 0.
На основе кинематических характеристик (4) вычисляются силовые параметры реакции – векторы восстанавливающих R ( t ), диссипативных F ( t ) и инерционных I ( t ) сил:
R ( t ) = KY ( t ) , F ( t ) = C ( t ) , I ( t ) = - M ( t ) . (5)
Далее для каждого элемента конструкции во временной области можно определить значения абсолютных и относительных деформаций, продольных сил и нормальных напряжений.
В момент времени t , когда происходит внезапное выключение несущего элемента, необходимо выполнить корректировку внешних динамических параметров РДМ конструкции. Для этого проводится решение уравнения (2) при новых значениях матриц M , С , K и в результате полученного значения матричного корня S в системе (3) формируются матрицы U и S , а также фундаментальная матрица. Вычисление полной реакции (3) проводится с учетом замены t 0 на t в компонентах реакции (4) – Z( t ). Вектор Q определяет ся выражением Q = KY st = KY st,i, где Y stt , Y st,i - векторы статических перемещений системы, соответственно, в неповрежденном и поврежденном состояниях. Векторы начальных условий (1) формируются в конце предыдущего интервала времени из уравнений (3), (4) при t = t i : Y 0 = Y ( t i ), Y > = Y ( t i ).
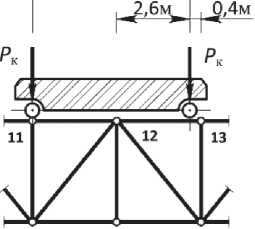
В качестве примера рассмотрена задача колебаний подкрановой двухпролетной фермы, вызванных действием импульсной нагрузки (рис. 1). Вертикальная нагрузка моделируется обрывом стропа на тележке с грузом при движении мостового крана (рис. 2, а).
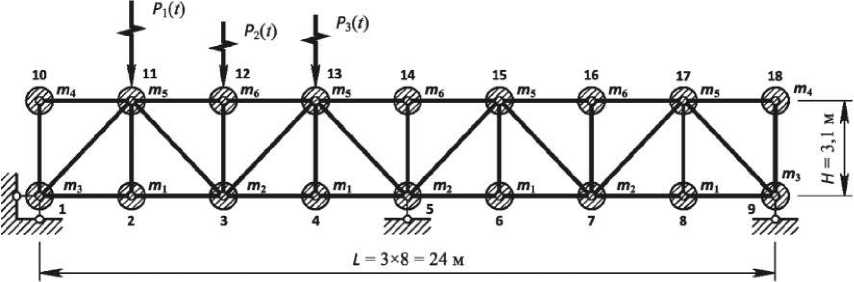
Рис. 1. Расчетная динамическая модель подкрановой фермы
В = 5,6м
2 3 4
а)
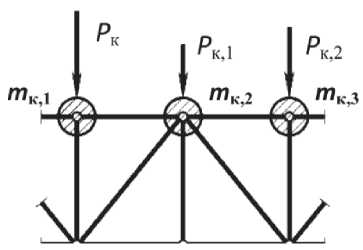
Рис. 2. Крановая нагрузка: а – положение крана в момент аварийного воздействия; б – узловая нагрузка от крана
2 3 4
б)
Каждый узел конструкции имеет две степени свободы – по горизонтали и вертикали. Общее число степеней свободы фермы, с учетом наложенных на нее связей, равно n = 32. Степень статической неопределимости – 1. Материал конструкции – сталь 09Г2 с начальным модулем упругости Е = 210060 МПа. Верхний пояс выполнен из двутавра 50Ш4, нижний пояс выполнен в виде парных уголков - 2L200 x 125 x 12, стойки -2L 125 x 12, раскосы - 2L 160 x 16. Массы m j модели складываются из масс стержней, сходящихся в узлах.
Матрица демпфирования С строится по модели непропорционального демпфирования [5, 6].
Элементы вектора статической нагрузки Q , связанные со степенями свободы в вертикальном направлении, определяются выражением Q k = M ( k , k ) g (рис. 1), где g - ускорение свободного падения тела. Элементы, относящиеся к степеням свободы в горизонтальном направлении, – нулевые. Матрица масс имеет диагональный вид, ее элементы моделируются узловыми массами, собранными с половины длины входящих в узел стержней.
Динамическая нагрузка моделируется при обрыве стропа в виде вертикальных импульсов на колесах крана, передающихся на подкрановую конструкцию. Для мостового крана грузоподъемностью 32 т со средним режимом работы амплитуда нагрузки в рабочем режиме составила Рk = 320 кН [7]. В момент аварии самым невыгодным оказалось положение крана, представленное на рис. 2, а. Сила Рk на левом колесе тележки прикладывается к узлу 11 в полную величину, а на правом колесе пропорционально раскладывается на составляющие Pk1 = ( 0,4/3 ) Рк и Рк 2 = ( 2,6/3 ) Рк и прикладывается к двум смежным узлам 12 и 13, соответственно (рис. 2, б). При формировании матрицы масс для узлов 11-13 были учтены присоединенные (дополнительные) массы mk, j , связанные с положением крана в момент аварийного воздействия (рис. 2, б).
При коэффициенте динамичности к дин = 3 максимальная амплитуда нагрузки составила Р k , дин = 960 кН. Длина импульса была принята равной ta = 0,05 с .
На рис. 3 представлены осциллограммы кинематических (а, б, в) и силовых (г, д, е) параметров реакции, вычисленные по уравнениям (3)–(5) для узлов фермы 11-13 (рис. 2).
При t1 = 0,045 с и t2 = 0,1196 с происходит выключение из работы раскосов 5-13 и 1-11, соответственно, вследствие потери устойчивости от критических сжимающих напряжений σcr = 297,7 МПа. В момент перехода системы в новое состояние (при t1) кривые перемещений и скоростей (рис. 3, а, б) являются непрерывными функциями времени, что обеспечивается постановкой началь- ных условий (1, б), причем кривые скоростей (рис. 3, б) имеют переломы. Кривые ускорений (рис. 3, в) и силовых параметров реакции (рис. 3, г–е) имеют разрывы.
На интервале t е [ t 1 ; t 2 ] резко меняется характер колебаний узлов фермы: при выключении из работы раскоса 5-13 в спектре динамической реакции наряду с основным тоном усиливается вклад высших гармоник (рис. 3).
На рис. 4 показаны осциллограммы напряжений в стержнях левого (нагруженного) пролета фермы. Пунктиром показаны кривые, относящиеся к выключаемым из работы раскосам 5-13 и 1-11.
При потере устойчивости раскоса 1-11 (при t 2 ) левая половина РДМ фермы становится геометрически изменяемой системой и, следовательно, для заданной модели с шарнирными узлами резервы прочности оказываются исчерпанными, что неизбежно приведет к прогрессирующему обрушению. Однако в силу того, что верхний пояс фермы выполнен в виде неразрезной двутавровой балки, можно считать, что данная система еще обладает некоторой несущей способностью. Расчетная модель поврежденной конструкции в этом случае представляется в виде комбинированной системы, состоящей из балки жесткости и неполной шарнирной цепи (так как часть элементов решетки и нижнего пояса выключена из работы).
Для балочного механизма разрушения с пластическим шарниром в узле 11 предельная нагрузка составила Рu = 460 кН, что значительно ниже (более чем в 2 раза) амплитудного значения нагрузки при аварийном воздействии Pk , дин = 960 кН. Следовательно, данное запроектное воздействие приведет к полному обрушению левой части подкрановой конструкции.
Для оценки точности решения динамической задачи (1) была выполнена подстановка найденных вектор-функций кинематических параметров (3) в левую часть уравнения движения (1, а). Осциллограммы невязок этого уравнения на рис. 5 показывают, что погрешность вычислений не превышает величины A p ( t ) < |3,6 - 10 10| кН. Данный результат позволяет сделать предположение о том, что полученное решение является точным.
Сравнение с напряжениями по методикам [8, 9] показывает, что эти методики в целом дают завышенный результат: наибольшие отличия достигнуты для стержней 3-4 (расхождение в 5,85 раз) и 13-14 (расхождение в 8 раз) и для большинства стержней эти напряжения превышают предел прочности материала на растяжение (σ u,t = 305 МПа) и критические сжимающие напряжения (σcr = 282...315 МПа).
Все вычисления и подготовка графических материалов выполнялись с использованием системы инженерных и научных расчетов MATLAB.
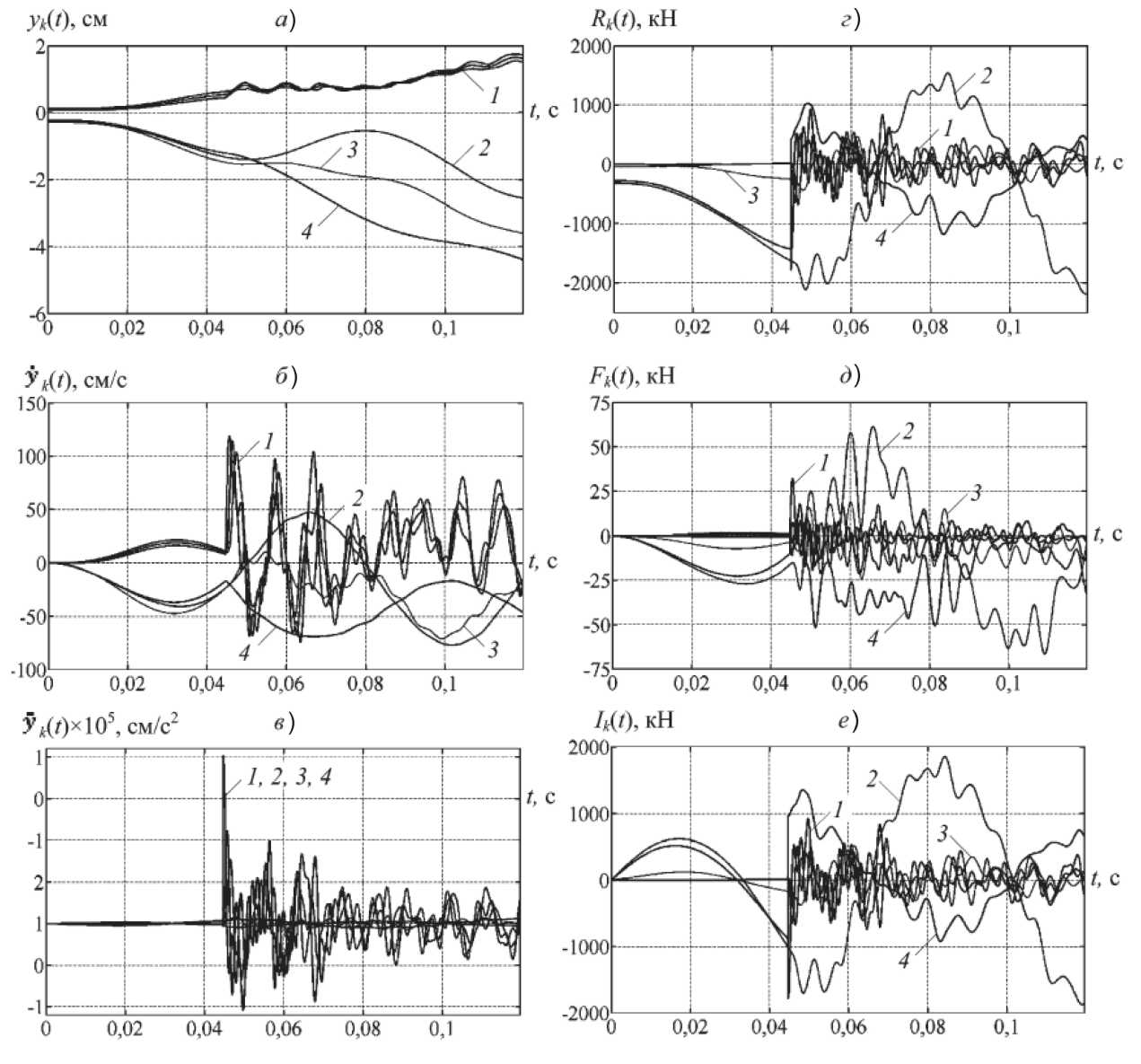
Рис. 3. Осциллограммы параметров реакции: а – перемещений; б – скоростей; в – ускорений; г – восстанавливающих сил; д – диссипативных сил; е – инерционных сил
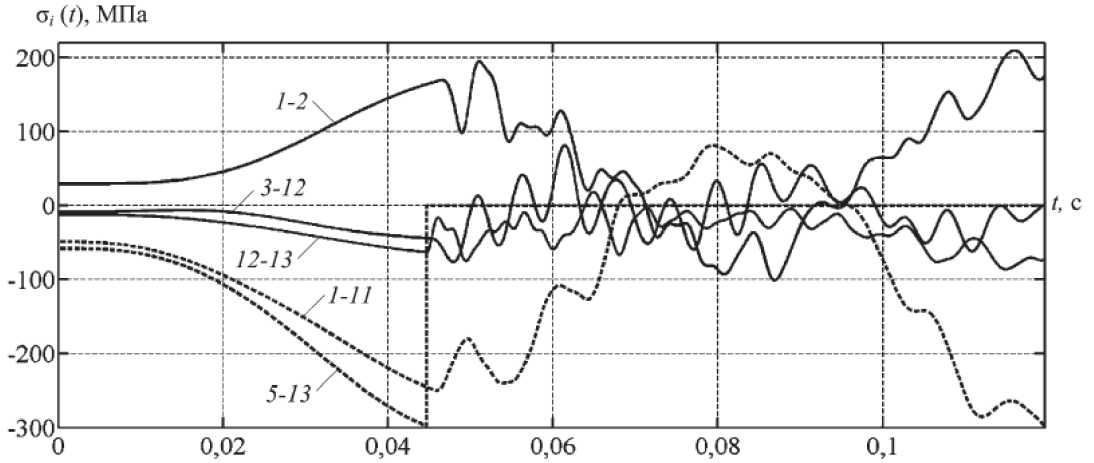
Рис. 4. Осциллограммы сжимающих и растягивающих напряжений
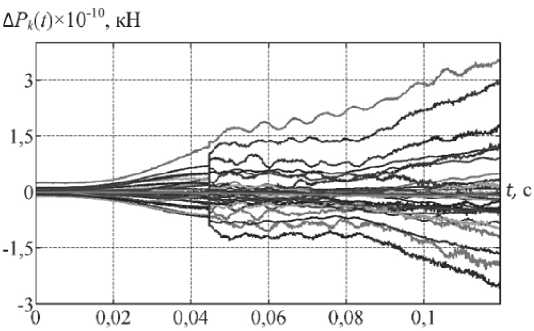
Рис. 5. Невязка уравнения движения (1, а)
Выводы. В аналитической форме построены уравнения динамической реакции ДДС с выключающимися (разрушающимися) связями. Представленные уравнения в рамках принятых моделей имеют замкнутую форму. Это подтверждает пример расчета подкрановой фермы на аварийное воздействие с выключающимися раскосами. Полученные результаты позволяют давать оценку несущей способности конструкции при отказе одного или нескольких последовательно выключающихся несущих элементов в процессе временного анализа. Открывается возможность для прогнозирования состояния конструкции в плане ее живучести, а также надежной и безопасной работы.
Список литературы Динамический расчет подкрановой фермы при конструктивно нелинейной работе ее элементов
- Андросова, Н.Б. Некоторые предложения к нормированию параметров живучести сооружений/Н.Б. Андросова, Н.В. Клюева, В.И. Колчунов//Вестник отделения строительных наук. -М.; Орел; Курск: РААСН, 2011. -Вып. № 15. -С. 17-25.
- Еремеев, П.Г. Предотвращение лавинообразного (прогрессирующего) обрушения несущих конструкций уникальных большепролетных сооружений при аварийных воздействиях/П.Г. Еремеев//Строительная механика и расчет сооружений. -М., 2006. -№ 2. -С. 65-72.
- Чернов, Ю.Т. К расчету систем с выключающимися связями/Ю.Т. Чернов//Строительная механика и расчет сооружений. -М., 2010. № 4. -С. 53-57.
- EUROCODE 1 -Actions of Structures. Part 3: Actions induced by cranes and machinery, 2006. -46 c.
- Потапов, А.Н. Динамический анализ дискретных диссипативных систем при нестационарных воздействиях: монография/А.Н. Потапов. -Челябинск: Изд-во ЮУрГУ, 2003. -167 с.
- Потапов, А.Н. Колебания систем с разрушающимися связями/А.Н. Потапов, Е.М. Уфимцев//Сб. трудов международной научно-практической конференции «Теория и практика расчета зданий, сооружений и элементов конструкций. Аналитические и численные методы». -М.: МГСУ, 2011. -С. 292-301.
- ГОСТ 25711-83. Краны мостовые электрические общего назначения грузоподъемностью от 5 до 50 т. Типы, основные параметры и размеры. Введен 12.04.1983. -М.: Государственный комитет СССР по стандартам. -19 с.
- Гениев, Г.А. Об оценке динамических эффектов в стержневых системах из хрупких материалов/Г.А. Гениев//Бетон и железобетон. -1992. -№ 9. -С. 25-27.
- Перельмутер, А.В. Реализация расчета монолитных жилых зданий на прогрессирующее (лавинообразное) обрушение в среде вычислительного комплекса SCADOffice/А.В. Перельмутер, Э.З. Криксунов, Н.В. Мосина//Инженерно-строительный журнал. -2009. -№ 2. -С. 13-18.
