Динамика автоматизированного электропривода с комбинированной оптимальной системой управления

Автор: Кочетков В.П., Курочкин Н.С.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 2 т.17, 2016 года.
Бесплатный доступ
Оптимальные системы управления техническими системами, широко используемые в космической отрасли, получили дальнейшее развитие в теории комбинированных оптимальных систем управления, которые строятся при последовательной коррекции внутренних координат, что позволяет уменьшить порядок систем уравнений объекта управления, и регулировании внешних координат на базе теории оптимального управления, теории систем с переменной структурой или многосвязных систем автоматического регулирования. Рассматривается автоматизированный электропривод горнодобывающего оборудования на примере экскаватора, рабочий цикл которого связан с тяжёлыми условиями эксплуатации: большой запылённостью, повторно-кратковременными режимами работы, ударами, вибрациями, большой частотой включения, изменяющейся в широких пределах нагрузки на валу двигателя, что отрицательно сказывается как на качестве и количестве объёмов добычи горной породы, так и на состоянии систем горных машин в целом. Рассмотрен электропривод поворотного механизма, имеющего наибольшее число отказов в механической и электрической частях экскаватора, с комбинированной оптимальной системой управления, представляющей внутренний контур питающего напряжения, рассчитанный по методу «технического оптимума», и аналитически конструируемый оптимальный регулятор (АКОР) внешних координат по току якорной цепи и скорости двигателя, расположенный в прямом канале системы управления. Для исследования электропривода создана имитационная модель в программе MATLAB пакете Simulink. Изменение коэффициента при обратной связи по току двигателя и скорости первой массы влияет на время переходного процесса и на броски упругого момента автоматизированного электропривода поворота экскаватора. При увеличении весового коэффициента обратной связи по току двигателя увеличивается время переходного процесса и уменьшаются броски момента упругого, при увеличении весового коэффициента обратной связи по скорости первой массы уменьшается время переходного процесса и увеличиваются броски момента упругого. Исследовано влияние весовых коэффициентов критерия оптимальности на динамику электропривода в режимах пуска, а также предложен алгоритм выбора весовых коэффициентов. Результаты исследования показали преимущество оптимальных комбинированных систем управления электроприводом поворота экскаватора по сравнению с классической системой подчиненного регулирования.
Автоматизированный электропривод, комбинированная оптимальная система, аналитически конструируемый оптимальный регулятор
Короткий адрес: https://sciup.org/148177574
IDR: 148177574 | УДК: 62-83:681.5
Dynamics of automated electric drives with combined optimal control system
Optimum control systems of technical systems, widely used in the space industry, have been further developed in the theory of optimal combined control systems, which are built with consistent correction of internal coordinates, which reduces the order of the object equations systems management and regulation of foreign origin on the basis of optimal control theory, the theory of variable structure systems or multiply automatic control systems. The article considers the automated electric drive mining equipment by the example of the excavator, the duty cycle of which is associated with severe service conditions: high dustiness, re-intermittent operation, shock, vibration, high frequency switching, varying over a wide range of load on the motor shaft, which affects both the quality and quantity of rock production volumes, and the state mining machinery systems in general. The electric rotating mechanism, having the largest number of failures in mechanical and electrical parts of excavator, combined with optimal control system representing the inner loop voltage and analytically constructed optimal controller (ACOC) current anchor chain and the speed of the motor, located in the direct channel control system, has been considered. To investigate the drive simulation model has been created in the program MATLAB Simulink package. Changing the coefficient of feedback on the motor current and the speed of the first mass effect on the transition process and on the rolls elastic torque automated electric excavator turning. With an increase in the weighting of the feedback factor on the motor current increases during the transition process and reduces the time of the elastic rolls, increasing the weight of the feedback factor for the first mass velocity decreases during the transition process and increases the moment of the elastic rolls. The effect of weighting coefficients optimality criterion on the dynamics of the drive is in Run Mode, and an algorithm for selecting the weighting factors. The results showed the advantage of optimal combined rotation drive control system of the excavator in comparison with the classical system of slave control.
Текст научной статьи Динамика автоматизированного электропривода с комбинированной оптимальной системой управления
Введение. Использование широкого спектра систем автоматического регулирования в космической отрасли обусловлено сложностью объектов управления и большими требованиями к рабочим характеристикам систем и качеству управления. Применение многосвязных систем автоматического регулирования (МСАР) обусловлено происходящим в одно и то же время регулированием более одной величины. Таким образом, многосвязная система регулирования объединяет несколько односвязных систем, обладающих необходимыми качествами. Теорией систем с переменной структурой (СПС) пользуются для придания системам управления новых качеств за счет внешних координат. В структуру системы вводят функциональные элементы при синтезе управляющего устройства, которые при протекании процесса управления меняют свой знак обратной связи, резко-переменно изменяют коэффициенты воздействия по различным координатам, т. е. изменяют структуру системы. Оптимальные системы управления техническими системами, широко используемые в космической отрасли, получили дальнейшее развитие в теории комбинированных оптимальных систем управления (КОСУ), которые строятся при последовательной коррекции внутренних координат, что позволяет уменьшить порядок систем уравнений объекта управления, и регулировании внешних координат на базе теории оптимального управления [1; 2].
КОСУ сочетают подчиненное регулирование внутренних и оптимальное регулирование внешних координат электропривода. Оптимальным называется управление, обеспечивающее достижение наилучших в смысле выбранного критерия качественных показателей системы в условиях заданных ограничений на управляющие воздействия и переменные состояния. Комбинированную систему оптимального управления можно составить из системы, представляющей одно-, двух- или трехконтурную систему последовательной коррекции больших и средних постоянных времени, и системы, ограничивающей динамические нагрузки в механической части при помощи АКОР [3].
Применяя комбинированные оптимальные системы управления, мы ставим задачу уменьшения бросков упругого момента, но необходимо выполнить ее так, чтобы изменения не привели к увеличению времени переходного процесса.
В комбинированных оптимальных системах управления мы можем изменять коэффициенты обратных связей (весовые коэффициенты критерия оптимальности), в отличие от систем подчиненного регулирования. Это свойство КОСУ позволяет нам найти наилучшее решение поставленной задачи, т. е уменьшение бросков упругих моментов и времени переходного процесса [4].
Математическое описание объектов управления и регулирования. Комбинированные оптимальные системы управления могут быть с коррекцией первой, первой и второй, а также первой, второй и третьей внутренних координат объекта управления. Внутренними координатами электропривода по системе «тиристорный возбудитель - генератор - двигатель» (ТВ-Г-Д), который широко применяется для объектов горной промышленности, являются, соответственно, ток возбуждения генератора (питающее напряжение генератора), ток якорной цепи и скорость двигателя [5].
Рассмотрим математическое описание двухмассовой электромеханической системы (ЭМС) с электроприводом типа ТВ-Г-Д с учетом только координат, а также при введении различных производных координат. Координатами ЭМС являются: токи возбуждения генератора и якорной цепи, скорости двигателя и второй массы и упругий момент. Математическое описание двухмассовой ЭМС состоит из системы пяти дифференциальных уравнений первого порядка и представляет модель объекта управления. Во всех остальных случаях, когда математическое описание ЭМС состоит из системы больше или меньше пяти дифференциальных уравнений первого порядка, это описание представляет модель объекта регулирования [6].
Введем контур питающего напряжения, структурная схема которого приведена на рис. 1.
По методике расчета систем на «технический оптимум», приравнивая желаемую и реальную передаточные функции разомкнутого контура питающего напряжения, определим передаточную функцию регулятора питающего напряжения:
™ ТУ “Г = W ® ( p ) W E ( p ) W г ( p ) k он , 2 TP ( TP +1 )
где Wрн (p), W„ (p), Wг (p) - передаточные функции соответственно регулятора питающего напряжения, возбудителя, генератора; kон - коэффициент передачи датчика питающего напряжения; Т^ - некомпен-сируемая постоянная времени; kв, kг - коэффициенты усиления тиристорного возбудителя и генератора. Таким образом, для системы ТВ-Г-Д получаем ПИ-регулятор питающего напряжения. Разделив и умножив каждое звено соответственно на выходную и входную базовые величины, получим передаточные функции всех звеньев контура питающего напряжения в относительных единицах [7; 8]. Передаточная функция замкнутого контура питающего напряжения
W ( p) ~ 1/k он зпн ' 2ТЦ p+1
При пренебрежении некомпенсируемой постоянной времени
W™ (Р ) = . ' = k н.
k он
Двухмассовую электромеханическую систему (ЭМС) представим в виде расчетной схемы (рис. 2).
Математическое описание ЭМС с коррекцией питающего напряжения может быть представлено в следующем виде:
Структурная схема объекта управления в соответствии с системой уравнений (1) с контуром питающего напряжения представлена на рис. 3.
Умножив и разделив каждую переменную на базовую величину, получим:
dz * 1 .* с ®s * k н u y s *
--- =--in--® л +------u V aay a i^q S a aS d® Cla 8 . *— Ms M *
dt J 1 ®s a J 1 ®sу
dMу dt d ®*2 dt
C 12 ® S
*
® 1
*
— ®2
-M s_ m *
J 2 ® S ’
+ pBT^(® ;
вт ms 1
®
*
(, _ Р вт ®S 'вт , , M s
где z'a , ® * , ® 2 , M у - координаты в относительных
единицах.
Обозначим z' a = х 1 , ® * = х 2, ® 2 = х 3, M у = х 4
В относительных единицах в формализованном виде электромеханическую систему представим уравнениями (2):
dia dt
R a
L a
a
—
С к *
C *
— ® 1 + — u у , aa
d ® 1 dt
C
J 1 ‘
JMу
dMу „ / dt C12 (®1
— ®2 ) + Рвт (®1 — ®2 ) ,
d ® 2 dt
= — M у .
J 2
x^ = — an x1 — a12 x 2 + bu, x 2 — a 21X1 a 23 x3, x3 — a 31 x1 + a 32 x 2 a 33 x3 a 34 x 4
x 4 = a 43 x 3 ,
где a ij - коэффициенты при координатах, выраженные в реальном масштабе времени, в отличие от рассмотренных ранее; x 1 , x 2, x 3, x 4 - соответственно ток якорной цепи, скорость двигателя, упругий момент и скорость второй массы в относительных единицах; и - управляющее воздействие.
и рб В и вб Г Е гб
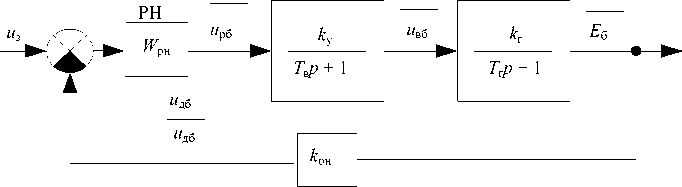
Рис. 1. Структурная схема контура питающего напряжения
u
Замкнутый контур питающего напряжения
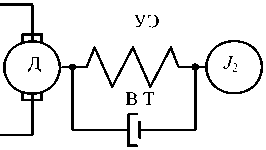
Рис. 2. Расчетная схема двухмассовой ЭМС
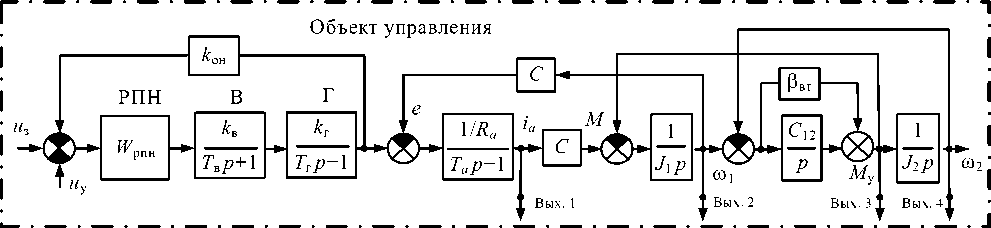
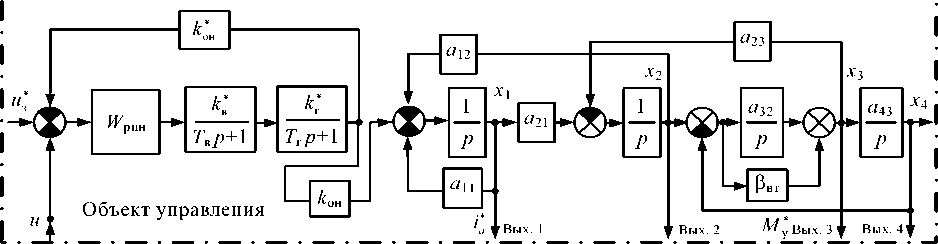
б
Рис. 3. Структурная схема объекта управления: а - в абсолютных единицах; б - в относительных единицах
Если информация имеется только об электрических параметрах, то электромеханическую систему рассматривают как одномассовую [9; 10]. В этом случае, пренебрегая некомпенсируемыми постоянными времени в контуре питающего напряжения, математическое описание электромеханической системы представляют в виде
х 1 = х 5, х 2 = х 6, х 3 = х 7, х 4 = х 8,
dia = _ Ri dt Laa dto c .
dt J z a
c
--to
L a
k н
L a
У ’
при различном сочетании координат и этих производных.
Синтез комбинированной оптимальной системы управления с коррекцией питающего напряжения. Рассмотрим объект регулирования в виде одномассовой электромеханической системы, описываемой системой уравнений (3):
х ^ = _ an х 1 _ a 12 х 2 + bku ,
. х 2 = a 21 х Г
Умножив и разделив все переменные на их базовые величины, получим di^ = _ ' i _cto^to* + uu*,
, dt Ta LX 8 LJ, 8 y dto* _ da8 i*
_ dt J ^ to8 a .
Критерии оптимальности для общего случая при возмущающем и управляющем воздействиях соответственно:
1 го 1 го
J = — ^ х + х^ + u ddt , J = — J^ ^ i + u ^ dt ,
20х 7 20х 5
В формализованном виде математическое описание одномассовой электромеханической системы представим в виде уравнений (3):
х1 = _ a11 х о „ х 2 = a 21хГ
_ a 12 х 2 + bku ,
Представляем математическое описание электромеханической системы при введении дополнительных координат х 5, х 6, х 7 и х 8 - производных соответственно тока якорной цепи, скорости двигателя, упругого момента и скорости второй массы:
J ’ = 1 J^ х 2 + и 2 ) dt .
20v
На основании метода динамического программирования Р. Беллмана [11-13] определяем коэффициенты оптимальных обратных связей по току якорной цепи и скорости двигателя для общего случая, при возмущающем и управляющем воздействиях.
В данной работе остановимся на определении структуры аналитически конструируемого оптимального регулятора, который поместим в прямой канал регулирования. Воспользуемся вычислительной процедурой принципа максимума Л. С. Понтрягина [14; 15].
Для общего случая критерия оптимальности функция Гамильтона имеет вид
1 2.2.2 0
H = _— ( х 1 + х 2 + и ) +Y t (_ a n х 1 _ a 12 х 2 + bku ) + у 2 a 21 х 1 .
Приравняв к нулю производную функции Гамильтона по управлению, получим оптимальное управление u 0 - b k V i .
Полагая, что оптимальное управление будет отрицательным по отношению к задающему воздействию, примем u 0 =- bk Vr(4)
Тогда система сопряженных уравнений примет вид d V1 dt d V 2 dt
ан _о a11V1 + a 21V2
a X i
a н
~--- - a i2 V i - x 2 .
На основании (4) и (5) составим структуру АКОР (рис. 4).
Структурную схему электропривода с КОСУ, представляющую внутренний контур напряжения и АКОР по ia и ц , можно рассмотреть как трехконтурную систему с внешним контуром скорости и подчиненным контуром тока с внутренней обратной связью (рис. 5).
В АКОР апериодическое звено W (p) = —1— рт Р + aii выполняет роль регулятора тока, а интегрирующее звено W c(p)= a21 - регулятора скорости. pp
Кроме того, есть внутренняя обратная связь а i2 с регулятора тока на регулятор скорости.
Моделирование электропривода с коррекцией питающего напряжения и оптимальным регулированием по току якоря и скорости двигателя. На основании структурной схемы (рис. 5) составлена схема модели электропривода с КОСУ (рис. 6).
Объект управления имеет вид представленный на рис. 7.
В табл. 1 приведены результаты моделирования электропривода с КОСУ с коррекцией питающего напряжения и оптимальным регулированием по i я и ю 1 . Наблюдается зависимость бросков момента упругого ( М у) и времени переходного процесса ( t пп) от весового коэффициента по току якоря ( ia ), зависимость бросков момента упругого ( М у) и времени переходного процесса ( t пп) от весового коэффициента по скорости двигателя (ю 1 ).
Как видно из графика (рис. 8), при увеличении весового коэффициента по току якоря уменьшаются максимальные броски момента упругого, однако увеличивается время переходного процесса, что является негативной характеристикой для электропривода. Регулируя величину весового коэффициента по току якоря, мы можем настроить систему таким образом, чтобы она отвечала требованиям электропривода. Таким образом, получаем возможность настройки системы на требуемые параметры.
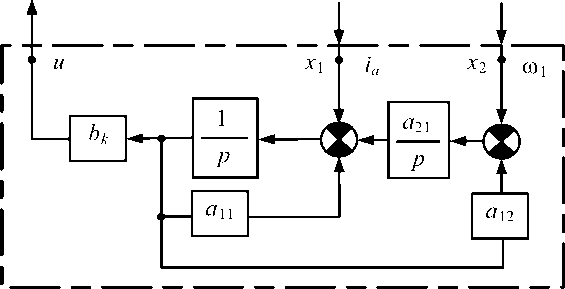
Рис. 4. Структурная схема АКОР по i a и ® i
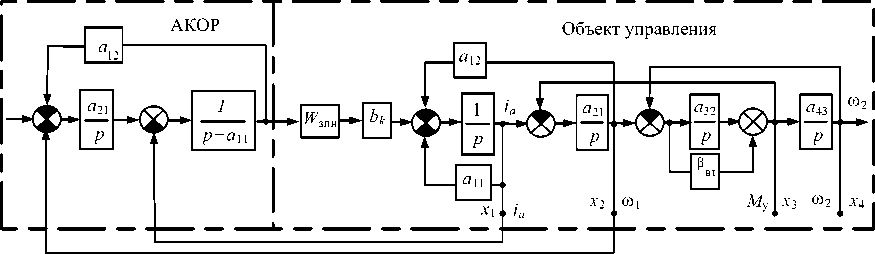
Рис. 5. Структурная схема электропривода с КОСУ по i a и ® i
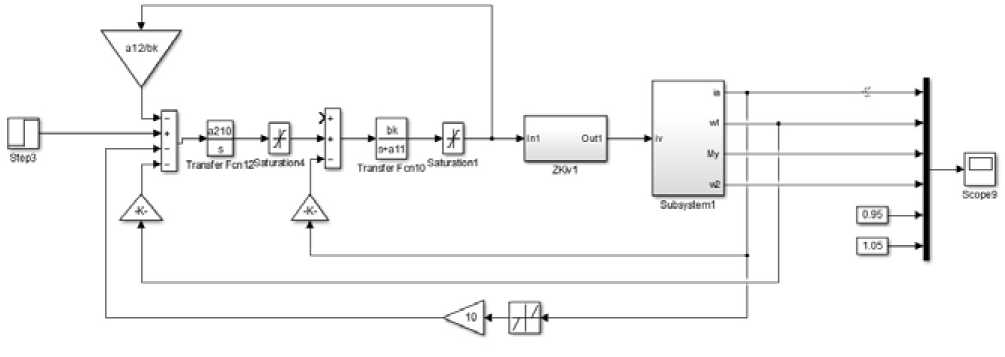
Рис. 6. Схема модели электропривода с КОСУ с коррекцией питающего напряжения и оптимальным регулированием по i я и ® 1
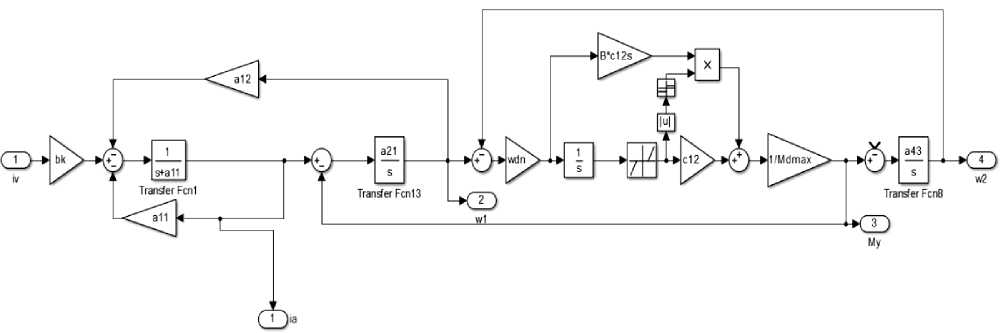
Рис. 7. Объект управления электропривода с КОСУ с коррекцией питающего напряжения и оптимальным регулированием по i a , и w 1
Таблица 1
|
K ia |
M max |
t пп |
K ш 1 |
M max |
t пп |
|
0,00 |
2,09 |
6,00 |
0 |
2,09 |
6 |
|
0,10 |
1,64 |
6,60 |
1 |
2,02 |
4,9 |
|
0,20 |
1,43 |
7,20 |
3 |
2,12 |
4,45 |
|
0,30 |
1,43 |
7,80 |
6 |
2,12 |
4,33 |
|
0,40 |
1,30 |
8,20 |
8 |
2,1 |
4,3 |
|
0,50 |
1,21 |
8,80 |
10 |
2,12 |
4,2 |
Зависимость бросков момента упругого
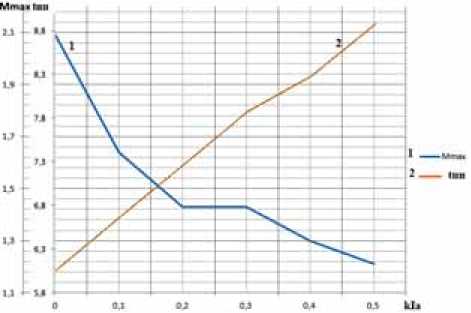
Рис. 8. График зависимости бросков момента упругого ( M ymax ) и времени переходного процесса системы ( t пп) от весового коэффициента по току якоря ( i a )
Как видно из графика (рис. 9), при увеличении весового коэффициента по скорости двигателя, скорости двигателя, максимальные броски момента упругого остаются почти неизменными при уменьшении времени переходного процесса, что является положительной динамикой для электропривода. Таким образом, получаем возможность настройки системы на требуемые параметры. В табл. 2 показана зависимость ( М у) и ( t пп) от весовых коэффициентов ( i a ) и (to 1 ).
При разных вариациях весовых коэффициентов по току двигателя и скорости первой массы наблюдается аналогичная тенденция: уменьшение времени переходного процесса и малое увеличение максимального значения броска момента упругого при увеличении теля и уменьшение бросков максимального значения момента упругого и увеличение времени переходного процесса при увеличении весового коэффициента по току двигателя.
Из результатов моделирования, полученных осциллограмм (рис. 10, 11) мы наблюдаем значительное уменьшение бросков упругого момента при пуске двигателя вместе с уменьшением времени переходного процесса, что положительно сказывается на динамике электропривода поворота экскаватора и его надежности в работе. Увеличение межремонтного срока службы экскаватора, а также уменьшение времени вывода в ремонт горных машин положительно сказывается на увеличении объёмов добычи горных пород
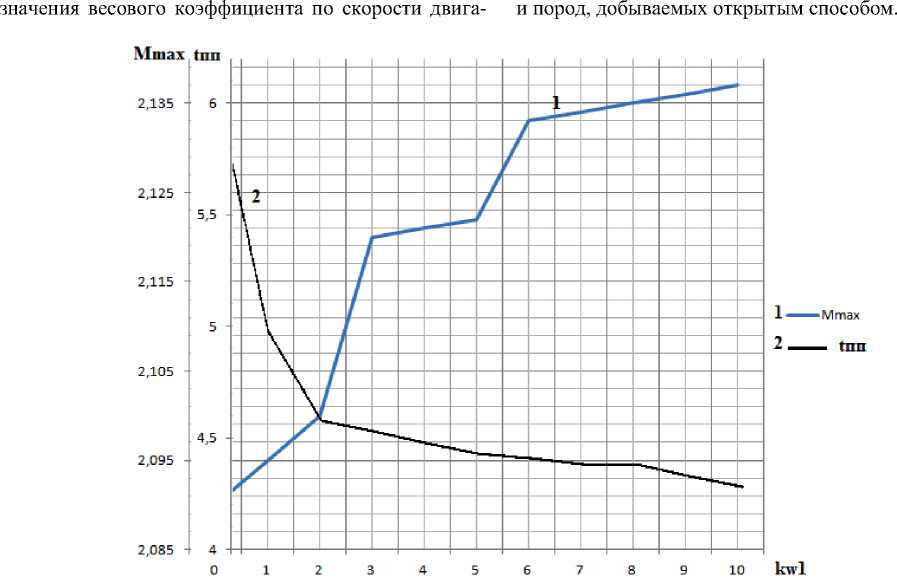
Рис. 9. График зависимости бросков момента упругого ( M ymax ) и времени переходного процесса системы ( t пп) от весового коэффициента по скорости двигателя (to ! )
Таблица 2
Зависимость времени переходного процесса
|
kia |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
|||||
|
k to ! |
M max |
t пп |
M max |
t пп |
M max |
k to 1 |
M max |
t пп |
M max |
t |
|
0 |
1,64 |
6,60 |
1,56 |
6,00 |
1,49 |
0 |
1,64 |
6,60 |
1,56 |
6,00 |
|
1 |
1,83 |
5,50 |
1,71 |
6,00 |
1,70 |
1 |
1,83 |
5,50 |
1,71 |
6,00 |
|
2 |
1,97 |
5,20 |
1,90 |
4,90 |
1,88 |
2 |
1,97 |
5,20 |
1,90 |
4,90 |
|
3 |
2,00 |
4,60 |
1,92 |
4,90 |
1,91 |
3 |
2,00 |
4,60 |
1,92 |
4,90 |
|
4 |
2,04 |
4,50 |
2,00 |
4,80 |
1,91 |
4 |
2,04 |
4,50 |
2,00 |
4,80 |
|
5 |
2,03 |
4,40 |
2,00 |
4,50 |
1,94 |
5 |
2,03 |
4,40 |
2,00 |
4,50 |
|
6 |
2,07 |
4,40 |
2,01 |
4,50 |
1,99 |
6 |
2,07 |
4,40 |
2,01 |
4,50 |
|
7 |
2,01 |
4,38 |
2,01 |
4,40 |
2,00 |
7 |
2,01 |
4,38 |
2,01 |
4,40 |
|
8 |
2,07 |
4,35 |
2,01 |
4,40 |
2,00 |
8 |
2,07 |
4,35 |
2,01 |
4,40 |
|
9 |
2,00 |
4,33 |
2,03 |
4,40 |
2,00 |
9 |
2,00 |
4,33 |
2,03 |
4,40 |
|
10 |
2,09 |
4,31 |
2,04 |
4,30 |
2,00 |
10 |
2,09 |
4,31 |
2,04 |
4,30 |
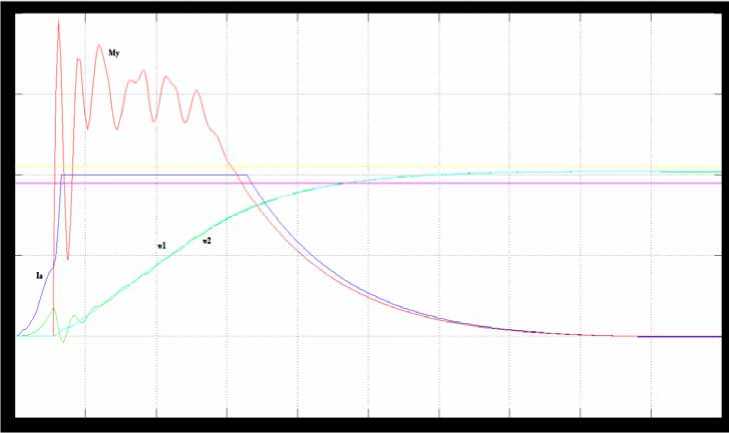
Рис. 10. Осциллограмма переходного процесса КОСУ в относительных единицах c наименьшим временем переходного процесса t пп
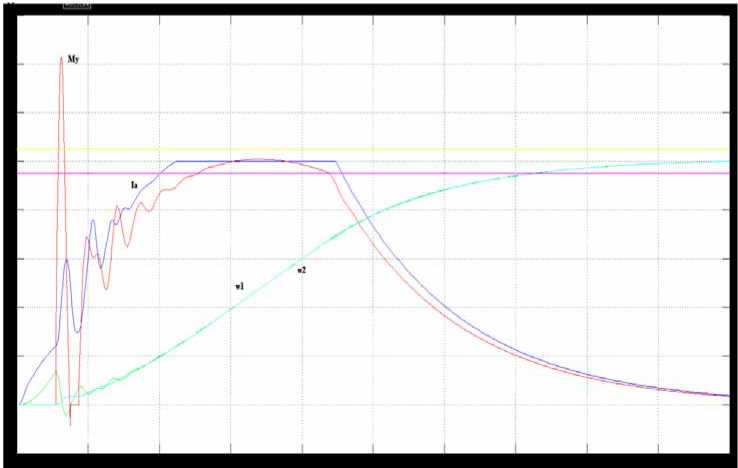
Рис. 11. Осциллограмма переходного процесса КОСУ в относительных единицах с наименьшими колебаниями момента упругого M y
Заключение. Рассмотренные системы отличаются от классических комбинированных систем управления, сочетающих системы управления по отношению к возмущению. В общем виде структура аналитически конструируемого оптимального регулятора определяется транспонированной моделью объекта регулирования. В комбинированных оптимальных системах управления в частном случае решен вопрос определения весовых коэффициентов критериев оптимальности, а в общем случае задача нахождения весовых коэффициентов не решена. За счет применения КОСУ удалось значительно уменьшить максимальное значение бросков упругого момента ( M утах) и при этом уменьшить время переходного процесса ( t пп).
Результат исследования показал преимущество оптимальных комбинированных систем управления электроприводом поворота перед классическими сис темами подчиненного регулирования. Возможность настройки системы за счёт выбора весовых коэффициентов критерия оптимальности позволяет выбрать требуемые характеристики электропривода: момента упругого (Mymax) и времени переходного процесса (tпп).
Областью применения результатов исследования является космическая отрасль, машиностроительная промышленность, горнодобывающий комплекс (экскаваторы, драги и другие механизмы), рабочий цикл которых связан с тяжёлыми условиями эксплуатации.
Список литературы Динамика автоматизированного электропривода с комбинированной оптимальной системой управления
- Кочетков В. П. Основы теории управления. Ростов н/Д: Феникс, 2012. 411 с.
- Ключев В. И. Ограничение динамических нагрузок электропривода. М.: Энергия, 1973. 320 с.
- Кочетков В. П., Подборский П. Э., Коловский А. В. Оптимизация динамики электромеханической системы с помощью систем с переменной структурой//Мехатроника, автоматизация, управление. 2009. № 10 (103). С. 42-47.
- Kochetkov V. P. Interconnected control system of the excavator electric drive//Seventh intern. conf. on electrical machines and drives. Varna Bulgaria, Ltd -SOFIA, 1993. P. 378-386.
- Kochetkov V. P., Ageev S. L., Vaschenko G. V. Optimal control of shovel electric drive//Seventh intern. conf. on electrical machines and drives. Varna Bulgaria, Ltd -SOFIA, 1993. P. 386-394.
- Kochetkov V. P., Kochetkov V. M. Electric drive of swing mechanism with non-traditional control system//Seventh intern. conf. on electrical machines and drives. Varna Bulgaria, Ltd -SOFIA, 1993. P. 394-402.
- Волков Д. П., Каминская Д. А. Динамика электромеханических систем экскаваторов. М.: Машиностроение, 1971. 384 с.
- Уткин В. И. Скользящие режимы в задачах управления и автоматизации. М.: Наука, 1981. 368 с.
- Квакернак Х., Сиван Р. Линейные оптимальные системы управления. М.: Мир, 1977. 650 с.
- Методы классической и современной теории автоматического управления: учебник. В 5 т. Т. 5. Методы современной теории автоматического управления/под ред. К. А. Пупкова, Н. Д. Егупова. 2-е изд., перераб. и доп. М.: Изд-во МГТУ им. Н. Э. Баумана, 2004. 787 с.
- Рудаков В. В., Мартикайнен Р. П. Синтез электроприводов с последовательной коррекцией. Л.: Энергия, Ленингр. отд-ние, 1972. 120 с.
- Кочетков В. П., Курочкин Н. С. Исследование ограничения динамических нагрузок многодвигательного электропривода с комбинированной оптимальной системой управления//Энергетика и энергосбережение: теория и практика: материалы I Всерос. науч.-практ. конф. (3-5 дек. 2014, г. Кемерово)/Кузбас. гос. техн. ун-т им. Т. Ф. Горбачева; редкол.: В. П. Тациенко (отв. ред.) . Кемерово, 2014.
- Disturbance-free operation of a six-phase AC motor drive system/C. B. Jacobina //Proc. IEEE Power Electronics Specialists Conf. PESC. Aachen, 2004. P. 925-931.
- Comparison among different voltage feeding algorithms for quasi-resonant DC link inverter-fed I. M. drives based on state feedback approach/G. Gatto //International Review on Modelling and Simulations (IREMOS). 2011. № 4 (4). P. 1506-1512.
- Mekhilef S., Rahim N. A. Xilinx FPGA three phase PWM inverter and its application for utility connected PV system//IEEE Proceedings. 2002. P. 2079-2082.
