Динамика и моделирование транспортно-технологических машин для сельского хозяйства

Автор: Жаров Виктор Павлович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 9 (60) т.11, 2011 года.
Бесплатный доступ
Изложены научные основы динамики и механико-математического моделирования транспортно-технологических машин для сельского хозяйства как нестационарных колебательных систем с переменными параметрами, с голономными и неголономными связями при нестационарных случайных возмущениях, что позволило на основе предложенного метода использования множителей Лагранжа в качестве выходных переменных динамических систем сельскохозяйственных машин представить последние в виде матриц и графов.
Динамика, моделирование, переменные параметры, голономные и неголономные связи, нестационарные случайные возмущения, множители лагранжа, матрицы, графы
Короткий адрес: https://sciup.org/14249714
IDR: 14249714 | УДК: 631.31:62-338
Dynamics and modeling of transport technological machines for agriculture
The scientific basis for the dynamics and mechanical-mathematic simulation of the transport technological machines for agriculture as the multivariable oscillatory systems with holonomic and nonholonomic constraints under the non-stationary random perturbations is described. It has permitted to represent the output variable dynamic systems of the agricultural machines, on the ground of Lagrange multiplier method, in matrices and graphically.
Текст научной статьи Динамика и моделирование транспортно-технологических машин для сельского хозяйства
Введение. Обзор работ по теме исследования [1] показал, что транспортно-технологические машины для сельского хозяйства представляют в общем виде нестационарные стохастические динамические системы с сосредоточенными и распределёнными параметрами, с голономными и неголономными связями при детерминированных и случайных возмущениях.
Ввиду отсутствия общих методов моделирования этих систем, используем метод учёта дополнительно налагаемых голономных и неголономных связей и их реакций с использованием множителей Лагранжа в качестве выходных переменных динамических систем сельскохозяйственных машин, что позволит представить уравнения движения в матрично-операторной форме или в виде графа.
Динамика и моделирование сельскохозяйственных машин. Предлагаемая форма записи уравнений движения нестационарной колебательной системы с переменными массами, конфигурация которой определяется совокупностью 5обобщённых координат qm (m = 1, 2,..., s), подчинённой г голономным нестационарным идеальным связям, описываемым уравнением F„ = = F„ (qif съ, .... qs, f) = 0 (ц = 1, 2, 3,..., г), а также г неголономным нестационарным линейным идеальным связям, описываемым уравнениями вида F. = ^avmq'm + av =0, где v = 1, 2, ..., г*; m=l оц,т av — коэффициенты, зависящие от обобщённых координат и времени, полученных из общего уравнения механики переменных масс с использованием принципа затвердевания в лагранжевых координатах, имеет вид:
F, = Yavmqm +av =o,(v=l,2,...,r ), m=l где T, П — кинетическая и потенциальная энергия системы; Ф — диссипативная функция Релея;
fm — обобщенные активные силы; \ут — обобщенные реактивные силы;---,---— частные dq dq’ производные по указанным переменным при группе переменных, принятых за независимые;
у, ^ — множители Лагранжа соответственно для голономных и неголономных связей.
В общем виде система уравнений (1) с учётом условия физической реализуемости системы в матричной форме записи для активных обобщённых сил записывается как:
W )] • [Q"(f)] + [ЖО] • [Q'(f)] + [C(f)] ■ [Q(f)] = [1(f)] ■ [f "(f)] + [ЖО] • [f'(f)] + [ЖО] • [Hf)] (2)
где [M (f)], [/? (f)], [C (f)] — матрицы инерции, демпфирования и жёсткости системы соответственно; [1 (f)], [Р(0], [C(f)] — матрицы инерции, демпфирования и жёсткости возмущений со-
|
+ |
ответственно; [(7 (f)] — матрица-столбец выходных переменных системы; [f (f)] — столбец входных переменных системы. |
матрица- |
|||||||||||||||||||||
|
рис |
1. Dim D2m |
||||||||||||||||||||||
|
я" Мп М21 Мп1 Ai Си С 21 |
Аналогично записывается матричное уравнение для реактивных обобщённых сил. |
||||||||||||||||||||||
|
Общий вид матричного уравнения (2) |
в компактной форме записи представлен на |
||||||||||||||||||||||
|
4" М12 М22 мп2 4.2 С12 С 22 |
4" Mis М2= Mns 4s Cis C 2s |
Mls+1 M2S+1 Mns+1 X! Cls+1 C2S+1 |
Xl Mis+2 M2S+2 Mns+2 X2 Cls+2 C 2s+2 |
M1„ M2n Mnn Xf C In C 2n |
+ |
R11 R21 Rm fl Ln L21 |
4.2 R12 R22 Rn2 f" L12 L22 |
... |
4 = Ris R2s Rns f" 1 m Llm l_2m |
Xi X2 . Rls+1 Rls+2 |
Rin R 2n । |
fl Dii D21 |
f2 D12 D22 |
||||||||||
|
R2s+1 R Rns+i R |
2s+2 is+2 • f P12 P22 |
||||||||||||||||||||||
|
• • Rnn |
+ |
||||||||||||||||||||||
|
+ |
fl Pll P21 |
Pim Pim |
|||||||||||||||||||||
|
Сп1 |
Сп2 |
с™ |
^3 ns+1 |
Cns+2 |
Cnn |
Lml |
Lm2 |
Lmm |
Pml |
Pm2 |
Pmm |
Dml |
Dm2 |
D mm |
|||||||||
Рис. 1. Общий вид матричного уравнения движения нестационарной колебательной системы с голономными и неголономными связями в компактной форме записи (для упрощения записи аргумент времени везде опущен):
Qi, ф,..., 0s — обобщённые координаты; Xi, Х2,..., Хг«— неопределённые множители Лагранжа для голономных и неголономных связей (s + г = л); Ми, L^ — элементы инерционных матриц, % Рц„ — диссипативных матриц, Си, Оц„ — жёсткостных матриц
Матричное уравнение (2) практически не ограничивает число входных и выходных переменных системы. Однако при очень большом числе степеней свободы колебательной системы её анализ и синтез встречают значительные трудности. В связи с этим большой практический интерес представляют вопросы упрощения колебательных систем в смысле уменьшения числа степеней свободы.
С этой целью представим колебательную систему, описываемую матричным уравнением (2), в виде графа. Для этого используем основные положения теории графов [2, 3] и их связь с матричной формой записи уравнений движения рассматриваемой колебательной системы.
Как известно, линейной или приводящейся к линейной системе соответствует сигнальный, или ориентированный, граф, отражающий причинно-следственные связи между входными и выходными переменными (сигналами) системы. Вершины (узлы) этого графа соответствуют сигналам, а соединяющие их ветви (дуги) — коэффициентам передач ветвей. Применительно к рассматриваемым колебательным системам вершинам-источникам (независимым или свободным переменным) соответствуют входные возмущения и их производные, а зависимым (базисным) вершинам (вершинам-стокам и смешанным вершинам) — выходные переменные и их производные. Смешанным вершинам инцидентны как входящие, так и исходящие ветви. Минимальное количество смешанных вершин (содержащих максимальное количество входящих и исходящих ветвей), при разрыве которых рвутся все контуры общего графа, называются существенными точками графа.
Отметим, что в зависимости от выбора существенных точек графа, для одного и того же матричного уравнения (или системы уравнений) можно построить множество равносильных графов.
Используя известные правила связи сигнальных графов с системами линейных и линеаризованных уравнений, представим колебательную систему, описываемую матричным уравнением (2) в виде графа. При этом в качестве существенных точек графа выберем вторые производные выходных переменных системы, а с целью простоты изображения исключим петли (замкнутые ветви, связывающие вершину саму с собой), то есть построим нормализованный сигнальный граф, общий вид которого представлен на рис. 2.
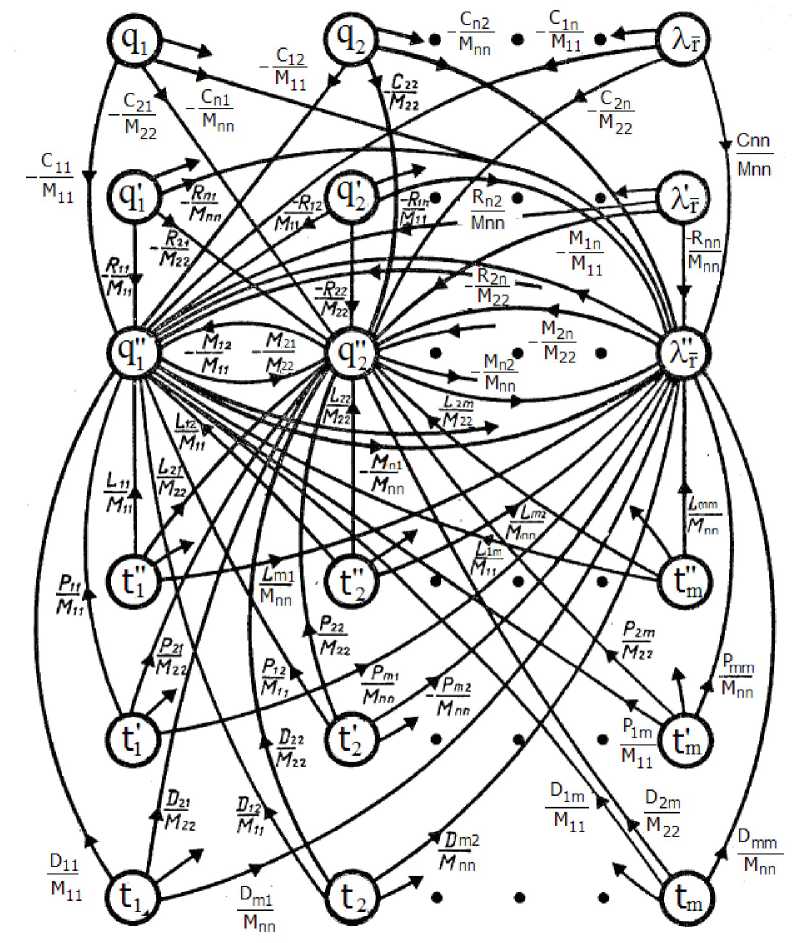
Рис. 2. Общий вид нормализованного сигнального графа нестационарной колебательной системы, матричное уравнение движения которой представлено на рис. 1
Заключение. Таким образом, математическое моделирование нестационарной динамической системы матричным уравнением типа (2) или соответствующим ему сигнальным графом позволяет решить вопросы как моделирования, так и упрощения этих колебательных систем.
Список литературы Динамика и моделирование транспортно-технологических машин для сельского хозяйства
- Жаров, В. П. Планирование виброизмерений для оценки некоторых параметров и класса колебательных систем сельскохозяйственных машин/В. П. Жаров//Комплексная механизация и автоматизация сельскохозяйственного производства. -Ростов-на-Дону, 1975. -С. 145-153.
- Оре, О. Теория графов/О. Оре. -Москва: Наука, 1980. -336 с.
- Сучилин, А. М. Применение направленных графов к задачам электротехники/А. М. Сучилин. -Ленинград: Энергия, 1971. -104 с.
