Динамика конвертеров с широтно-импульсной модуляцией

Автор: Богданов К.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 1 (8), 2006 года.
Бесплатный доступ
Рассматриваются основные схемы конвертеров с широтно-импульсной модуляцией с точки зрения динамики протекающих в них процессов, а также некоторые аспекты синтеза корректирующих звеньев. Представлена методика моделирования данных схем при помощи программных продуктов Simulink и MathCAD c использованием структурных схем.
Короткий адрес: https://sciup.org/148175141
IDR: 148175141 | УДК: 621.314.632
The PWM converter dynamics
In this paper there are described the main circuits of the PWM converters from the point of view of the undergoing processes and some aspects of synthesis of the corrective chains. There has been described the method in modeling of the given circuits with the help of the Simulink and Mathcad with the use of the structural circuits. 14
Текст научной статьи Динамика конвертеров с широтно-импульсной модуляцией
В связи с широким спектром применения электронных устройств актуальной является проблема обеспечения требуемого качества входного напряжения по таким параметрам, как коэффициент пульсации напряжения, коэффициент стабилизации напряжения, КПЦ источников питания, быстродействие схем стабилизации (особенно при коммутации реактивной нагрузки). Цля обеспечения этих требований используются стабилизаторы напряжения. Применяя конвертеры с широтно-импульсной модуляцией (ШИМ) в качестве стабилизаторов, можно эффективно управлять параметрами выходного напряжения, при этом обеспечивая приемлемые массогабаритные показатели проектируемых устройств.
Существуют три основные схемы преобразователей напряжения: с понижением и повышением напряжения, а также инвертирующая схема. Несмотря на внешнюю схожесть, эти схемы имеют несколько значительных различий, проявляющихся в том, что схема с понижением напряжения является последовательной, а схема с повышением и инвертирующая схема - параллельными. Цля улучшения параметров выходного напряжения с помощью корректирующих устройств необходимо иметь представление о динамических процессах в этих схемах, особенно о переходных процессах при включении и коммутации нагрузки.
В основной схеме понижающего конвертера (ПнК) (рис. 1) в качестве ключа 5 обычно используется биполярный транзистор структуры n - р - n , однако в последнее время здесь все чаще ставят n -канальные МОП-транзисторы. Интервал времени, в течение которого транзистор открыт, т. е. ключ замкнут (отрезок t на рис. 2 и 3), и интервал, когда транзистор закрыт, т. е. ключ разомкнут (отрезок t °ff ), определяются схемой управления ключом 5 СОN(рис.4).
Рис. 1. Основная схема ПнК
При замыкании ключа (момент 1 0 на рис. 2) напряжение в точке соединения диода VD и катушки L равно входному напряжению: и = U in , диод VD закрыт, и внешнее напряжение, приложенное к катушке L , равно uL = U in - U 0 (его полярность показана на рис. 1). Поэтому от источника U in ключ 5 и катушку L течет линейно возрастающий
U. — U ток iL = —е---01, благодаря которому в катушке накап ливается энергия магнитного поля. За время t ток iL воз-м + _Uin - Uof °”
растает на величину A IL =-------- 1 on .
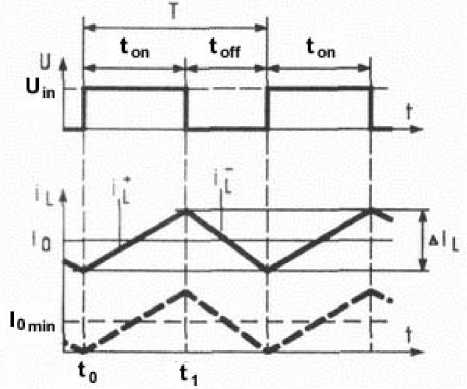
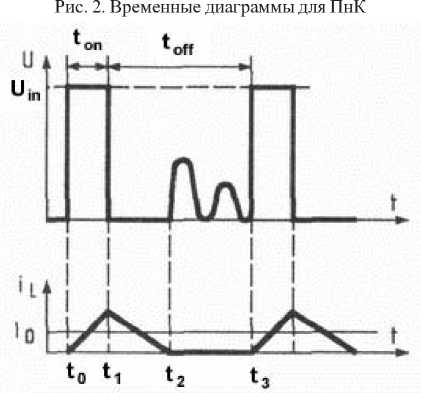
Рис. 3. Режим прерывистых токов ПнК
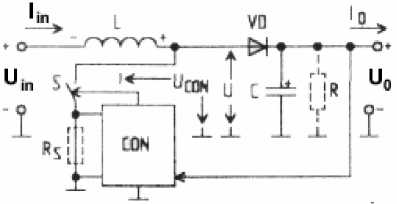
Рис. 4. Упрощенная схема управления ключом CON
При размыкании ключа 5 (момент 11 на рис. 2) внешнее напряжение исчезает, и катушка начинает расходо- вать свою энергию. Направление тока iL остается прежним: он продолжает течь через открытый диод VD, нагрузку и конденсатор С. В этом случае напряжение U0 оказывается приложенным к катушке L (если пренебречь падением напряжения на диоде VD) и задает линейно убывающий ток г- = ^- t. Знак минус в верхнем индексе тока указывает на то, что этот ток течет за счет расходова- ния энергии катушки.
Чаще всего схема работает в непрерывном режиме, при котором всегда iL > 0 (непрерывная линия на рис. 2). Это означает, что только часть накопленной энергии передается нагрузке за время toff, в течение которого ток уменьшается на величину Д/L = U-1of. Исходя из соотношения AIL = -AIL = ДL, которое имеет место в установившемся режиме работы, получаем зависимость t on
U0 t +t Uin, t on + t off
откуда видно, что всегда U> U 0 , т. е. это схема повышающего конвертера. Величину U 0 можно задавать через интервалы времени t оп и t ofp что осуществляется схемой
CON. При этом любое нежелательное изменение U 0 (например, вследствие изменения U iп ) приводит к соответ-
I -
ствующему изменению одного из этих интервалов, так что значение U 0 восстанавливается. Следовательно, работу ПнК в качестве стабилизатора обеспечивает именно CON.
Чаще всего схема CON задает постоянную частоту 11
f о = — =------ управляющих импульсов, а стабили-
T ton + toff зация обеспечивается путем изменения tоп, т. е. коэффициента их заполнения 8 = -on-. Это ПнК с широтно-импульсной модуляцией. При этом выражение (1) можно переписать в виде U0 = 8- Uin.
Важной особенностью этой схемы является линейная зависимость U0 от 8. В процессе работы ПнК могут возникать скачки тока iL (например, из-за резкого изменения U,п или сопротивления нагрузки на выходе), который насыщает катушку, пусть даже на небольшое время. А насыщенная катушка является практически коротким замы- канием со всеми вытекающими отсюда последствиями, вплоть до повреждений схемы. Избежать этого можно за счет применения ШИМ тока (ТШИМ), при которой CON следит за током, текущим через ключ 5, для чего используется резистор R , показанный на рис. 1 пунктиром.
Реже используется решение, когда система CON поддерживает постоянное значение t ofp что означает одновременное изменение 8 и/. Это понижающие конвертеры с частотно-импульсной модуляцией (ЧИМ).
Ток iL, текущий через катушку, имеет две составляющие: постоянную и переменную. Постоянная составляющая I0 представляет собой выходной ток конвертера, тогда как нежелательная переменная составляющая A V0 почти целиком проходит через конденсатор С. Оставшаяся ее малая часть идет через нагрузку, а это означает, что выходное напряжение U0 содержит переменную составляющую A V0, форма которой аналогична iL, а частота равна/. Это является основным недостатком ключевых конвертеров по сравнению с линейными стабилизаторами, у которых такой составляющей обычно не бывает. Поэтому ключевые конвертеры не рекомендуется использовать в аналоговых устройствах, предназначенных для усиления слабых сигналов, а если ключевые конвертеры все-таки используют, то их соединяют с линейным стабилизатором. На практике предпочтение отдают схемам, обеспечивающим AIL = b -10, при этом Ъ = 0,4.
Уменьшение тока I 0 означает его накопление в катушке L и, соответственно, отдачу меньшей энергии в нагрузку. При токе 1 0min = 0,5 Д /L (пунктирная линия на рис. 2) накопленная энергия и ток i L в момент замыкания ключа 5 становятся равными нулю. Дальнейшее уменьшение I 0 приводит к накоплению настолько малой энергии, что вся она полностью переходит на нагрузку еще до истечения времени t (момент 1 2 на рис. 3). Это означает отсутствие тока i L в интервале 1 2 - 1 3 , т. е. имеет место прерывистый режим работы. В течение этого интервала времени постоянный ток нагрузки поддерживает конденсатор С . Обнуление i L означает также прекращение течения тока через диод VD и его закрытие. В схеме появляется паразитный колебательный контур, состоящий из катушки L и емкости VD , в котором возникают затухающие колебания. Однако это не отражается на выходном напряжении ввиду большой емкости С . При необходимости, во избежание возникновения прерывистого режима, на выходе ПнК устанавливается резистор R (см. рис. 1), который обеспечивает I через катушку L на холостом ходу.
Рассмотрим далее принцип действия схемы управления понижающих конвертеров с ШИМ (рис. 5). В схеме имеется генератор OSC линейно изменяющегося напряжения U g , который замыкает ключ 5 в начале каждого периода. Это напряжение сравнивается с разностью ( U ref -aU 0 ) опорного напряжения U геР вырабатываемого схемой, и частью aU 0 выходного напряжения ( а < 1). Когда U g достигает значения ( U ref - aU 0 ), то ключ 5 размыкается. При нежелательном возрастании U 0 разность ( U ref - aU 0 ) уменьшается вместе с t , что приводит к уменьшению U 0 в соответствии с формулой (1). Аналогично уменьшение U 0 вызывает возрастание t . Усилитель ошибки ЕА (Error Amplifier) с коэффициентом усиления к имеет на своем выходе напряжение к ( U ref - aU 0 ), при этом U ref генерируется источником опорного напряжения Ref (Bandgap-Reference). Компаратор Сомр, сравнивающий напряжения U g и к ( U ref - aU 0 ), вырабатывает на выходе импульсы U C0N управления ключом 5 .
Основная схема повышающего конвертера (ПвК) приведена на рис. 6. Ключ 5 является биполярным транзистором структуры п-р-п или МОП-транзистором. Интервал времени, в течение которого транзистор открыт, т. е. ключ замкнут (отрезок t на рис. 7), и интервал, когда транзистор закрыт, т. е. ключ разомкнут (отрезок t), определяются схемой управления CON. При замыкании ключа (моменты 10 и 12 на рис. 7) напряжение в точке соединения диода VD и катушки L равно нулю (U = 0), если пренебречь падением напряжения на 5 и R . Диод VD закрыт благодаря положительной величине выходного напряжения, поддерживаемого зарядом, накопленным в конденсаторе С. К катушке L приложено входное напряжение Vп, и через эту катушку и ключ 5 проходит линей- но возрастающий ток iL = ^Ln-t, благодаря которому в катушке накапливается энергия магнитного поля. За время tоп ток в катушке возрастает на величину А/L = ^^ ton. При этом заряженный конденсатор С обеспечивает выходной ток Iу При размыкании ключа 5 (момент 11 на рис. 6) полярность напряжения, приложенного кL, меняет свое направление. Это напряжение складывается с Uп обеспечивает соотношение U > U.и открывание диода VD. Приложенное к L внешнее напряжение, равное . . - . - U .
U ;п - U ., , определяет проходящий через нее ток iL = -j- 1 .
А /,
L
U- in
^^^^^^е
L
U 0
--1 of f . Знак минус в верхнем индексе тока
указывает на то, что этот ток течет за счет расходования энергии катушки. Исходя из очевидного соотношения А /L = | А /L | = А / , которое имеет место в установившемся режиме работы, получаем зависимость:
U о = t^ и in . t off
Отсюда видно, что всегда U 0 > U m , т. е. это схема повышающего конвертера. Обычно CON задает постоянную 11
частоту J о = — =------ импульсов U N, управляющих
T t on + t off CUN
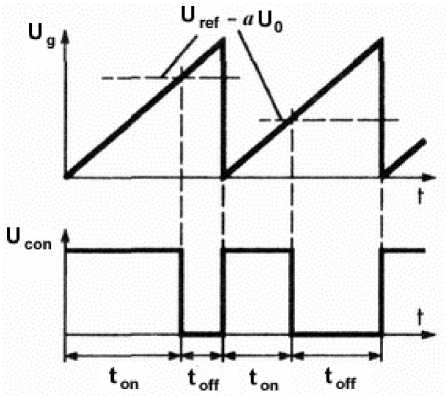
Рис. 5. Принцип действия схемы управления ПнК с ШИМ
ключом 5 . При этом U 0 можно изменять, варьируя t off , что означает использование широтно-импульсной моду
ляции. Более того, всякое нежелательное изменение U 0 приводит к такому изменению t off , чтобы исходное значение U 0 было восстановлено. Таким образом, работа ПвК в качестве стабилизатора обеспечивается CON через непрерывное изменение коэффициента заполнения
5 = 1 - — управляющих импульсов. Выражение (2) часто записывают в виде U 0 = —in- .
Во время работы ПвК могут возникать скачки тока i L из-за резкого изменения U ,п или сопротивления нагрузки
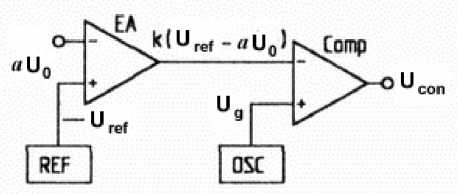
Рис. 6. Основная схема ПвК
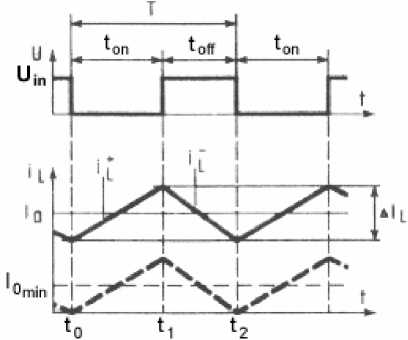
Рис. 7. Временные диаграммы для ПвК
на выходе, что может привести, пусть даже и на короткое время, к нежелательному насыщению катушки. Избежать этого можно при помощи токовой ШИМ, при которой CON регулирует ток через замкнутые контакты 5 , для чего используется резистор R , показанный на рис. 2 пунктирной линией. Реже используются ПвК с частотно-импульсной модуляцией при которой^ и д изменяются одновременно.
Ток i L имеет постоянную составляющую / 0 , которая является выходным током ПвК, и нежелательную переменную составляющую А 1 L , почти полностью проходящую через конденсатор С . Для нормальной работы ПвК рекомендуется обеспечить соотношение А /L = 0,4 / 0 . Оставшаяся небольшая часть А 1 L проходит через нагрузку. Это означает, что выходное напряжение U 0 имеет переменную составляющую. В этом заключается серьезный недостаток ПвК, который ограничивает их использование в электронной аппаратуре, обеспечивающей усиление слабых сигналов.
Уменьшение тока 1 0 означает его накопление в катушке L и, соответственно, отдачу нагрузке меньшей энергии. При / 0min = 0,5 А /L (пунктирная линия на рис. 7), накопленная энергия и I становятся равны нулю в момент замыкания ключа 5 . Дальнейшее уменьшение i 0 не рекомендуется, хотя такой режим работы, в принципе, возможен. Для того чтобы избежать режима работы, при котором i 0 < i , на выход конвертера ставят резистор R (см. рис. 6).
Таким образом, схема управления ПвК аналогична схеме управления ПнК.
Рассматриваемые в данной статье схемы ПнК и ПвК
Его величина со временем линейно уменьшается, так как катушка отдает свою энергию для поддержания тока 1 0 и восстановления заряда С . За время t off отдается лишь часть накопленной энергии, поэтому изменение тока составляет (с учетом соотношения величин U in и U 0 )
относятся к классу широтно-импульсных систем или, точнее, к классу нелинейных импульсных систем автоматического регулирования. Анализ и синтез подобных систем затруднен по двум причинам. Во-первых, часто практически невозможно построить структурную схему, соответствующую принципиальной схеме, используя клас-
сическое представление о широтно-импульсных системах. Во-вторых, методов анализа и синтеза таких систем, особенно для инженерных приложений, практически нет Это характерно для всех систем, в которых ключи работают по закону ШИМ.
На примере двух схем конвертеров с ШИМ: ПнК и ПвК - автором был предложен единый подход к построению структурных схем подобных конвертеров и к синтезу систем, оптимальных по быстродействию.
Схемы ПнК и ПвК (см. рис. 1 и 6) можно представить в виде структурных схем, изображенных на рис. 8, где использованы следующие обозначения: Е-входной сигнал (напряжение на входе конвертера); Uя - выходной сигнал; U - опорный сигнал; е - разность между опорным и выходным сигналом (ошибка); Ut - результат перемножения ошибки е и выходного сигнала U ;F - сигнал с генератора пилообразного напряжения (ГПН); БП - блок перемножения; РЭ - релейный элемент; Wfc - передаточная функция (ПФ) звена обратной связи (ОС); FD - нелинейный блок, имеющий коэффициент передачи Rпр (прямое сопротивление диода) при входном сигнале больше нуля и Rо6р (обратное сопротивление диода) при входном сигнале меньше нуля. Блок FD играет существенную роль в режиме прерывистых токов. В режиме непрерывных токов его влияние незначительно и его можно исключить из схемы. Для обеих схем можно записать
W 1 =
L • Р + Rl ’
W 2
R
R • С • p + 1
где L - индуктивность дросселя; R L - активное сопротивление дросселя; R - сопротивление нагрузки; С - емкость конденсатора фильтра; ^ - оператор Лапласа.
Структурная схема для ПвК (см. рис. 8) имеет нелинейный участок из-за наличия блока перемножения меж ду W^) и W^). По этой причине дифференциальное уравнение, записываемое для построения фазовых траекторий (ФТ), невозможно представить в форме Коши, т. е. разрешить относительно младших производных, и, следовательно, решить его аналитически. Для схемы ПнК подобная проблема не возникает.
Фазовые траектории системы, моделирующей работу ПвК, могут быть построены при помощи численных методов программы Simulink, входящей в состав пакета MatLab. Программа Simulink позволяет визуально смоделировать работу ПвК и для полученной модели построить ФТ как для разомкнутой схемы, так и для схемы, охваченной обратной связью.
Такое моделирование показывает основное различие в функционировании схем ПнК и ПвК: ПвК является схемой с токовым управлением , в то время как ПнК представляет собой схему суправлением по напряжению (рис. 9).
Фазовая траектория нескорректированного ПвК, охваченного обратной связью, практический сразу устремляется в ноль (следует учитывать, что сигнал в приведенных схемах Simulink репрезентует только значение напряжения). Таким образом, схема ПвК изначально не нуждается в корректирующем звене, так как оно само привнесет пульсаций энергии больше, чем ошибка, которую требуется скорректировать. Это происходит за счет постоянного увеличения тока через дроссель, что ведет к резкому понижению КПД.
Для дальнейшего анализа систем следует перейти от модели в пакете Simulink к эквивалентной электрической схеме. Для построения такой схемы можно воспользоваться одной из систем EDA (Electronic Design Automation), например пакетом Micro-Cap 7.0.
Следует отметить, еще одно принципиальное отличие в работе схем ПнК и ПвК. Дело в том, что при замкнутом ключе в схеме ПнК (см. рис. 1) энергия источника питания передается в нагрузку, а в схеме ПвК (см. рис. 6) на-
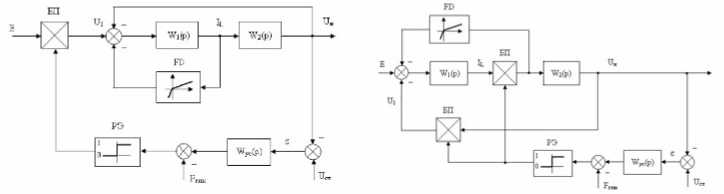
Рис. 8. Структурные схемы ПнК и ПвК с ШИМ
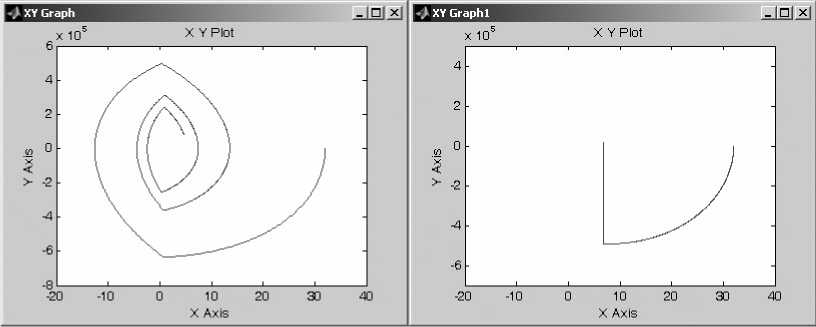
Рис. 9. Фазовые траектории для ПвК и ПнК
капливается в дросселе. Этим обусловлен различный вид регулировочных характеристик для данных схем - зависимостей между коэффициентом усиления к и относительной длительностью импульса у
Особенностью регулировочных характеристик для схемы ПвК является стремление коэффициента усиления к к бесконечно большому значению при у ^ 1. Однако если учитывать активные потери в элементах схемы, то величина к будет ограничена некоторым максимальным значением. Именно этим объясняется постоянное повышение тока через дроссель. Для борьбы с этим явлением в схему следует ввести делитель напряжения, коэффициент которого изменяется в зависимости от тока дросселя.
При помощи делителя можно корректировать относительную ширину импульсов, выдаваемых на ключ: снижать ее при увеличении тока и повышать при уменьшении. Такая мера достаточно эффективна, однако она порождает дополнительные пульсации выходного напряжения на нагрузке.
Таким образом, единообразный подход к синтезу и моделированию схем повышающих и понижающих конвертеров не состоятелен. При разработке математической модели ПвК необходимо принимать во внимание не только напряжения, но и токи. Введение же корректирующих звеньев в ПвК не целесообразно.
THE PWM CONVERTER DYNAMICS
In this paper there are described the main circuits of the PWM converters from the point of view of the undergoing processes and some aspects of synthesis of the corrective chains. There has been described the method in modeling of the given circuits with the help of the Simulink and Mathcad with the use of the structural circuits.
