Динамика пластины с упруго присоединённой массой

Автор: Садыгова Нигяр Эльбрус Гызы
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Методические основы совершенствования проектирования и производства технических систем
Статья в выпуске: 1 (51), 2020 года.
Бесплатный доступ
Решена задача о динамической нагрузке балки ударяющим телом в присутствии промежуточного демпфера - пружины заданной жёсткости. Полученные уравнения для совместного движения системы балка - пружина - тело состоит из уравнений для прогиба балки и уравнения движения тела, с учётом жёсткости пружины. Задача решается методом интегрального преобразования Лапласа по времени. Для обращения полученного решения используется численный метод Дурбина. С помощью данного метода построены графики решений, позволяющие пронаблюдать поведение тела и вычислить прогиб балки в момент времени. Также показана зависимость искомых функций от основных параметров задачи: жёсткости пружины и изгибной жёсткости балки.
Прогиб балки, колебание балки, пружина, напряжение, деформация, равновесие системы, метод дурбина
Короткий адрес: https://sciup.org/148318832
IDR: 148318832 | УДК: 517.28
Dynamics of a plate with elastically attached mass
In this paper, we consider the problem of the dynamic load of a beam by an impacting body in the presence of an intermediate damper - a spring of a given stiffness. The obtained equations for the joint movement of the beam - spring - body system consists of equations for the deflection of the beam and the equation of motion of the body, taking into account the stiffness of the spring. The problem is solved by the integral Laplace transform in time. To invert the obtained solution, the numerical Durbin method is used. Using this method, graphs of solutions are constructed that allow us to observe the behavior of the body and calculate the deflection of the beam at a time. Also shown is the dependence of the required functions on the main parameters of the problem: spring stiffness and bending stiffness of the beam.
Текст научной статьи Динамика пластины с упруго присоединённой массой
В современной механике твердого деформируемого тела задачи нагружения пружины вызывают особый интерес. В бампере транспортного средства, в турникетной опоре железнодорожного средства пружина и прикрепленные к ней устройства служат для гашения энергии удара, в витринном устройстве пружина с объектом на ней используется для выталкивания товаров. В работе [1] рассматривается задача о совместных колебаниях твердого тела, упруго присоединенного к неоднородной двухступенчатой балке в двух точках закрепления. В работе [2] исследованы механические колебания твердого тела, соединенного упругими связями со стержнем. Эти задачи были решены посредством вариационного принципа Гамильтона. В данной работе рассматривается задача, где в отличие от предыдущих работ, один конец балки не является закрепленным, а также, решение находится с помощью интегрального преобразование Лапласа [3-4] по времени. Для численного решения обратного преобразования применяется метод Дурбина [5, 6]. Аналитическое и численное решение сравнивается путем сверки на малом промежутке времени.
Пластиной называют тело, которое в не-деформированном состоянии является прямоугольным параллелепипедом, в котором один из размеров (толщина пластины – h) много меньше двух остальных. Учитывая малую толщину, кинематику движения материальных точек пластины можно свести к движению точек, изначально находившихся на срединной плоскости (рис. 1). Ось z направим по нормали к срединной плоскости, ось х — по длине пластины (L —длина), ось у —по ширине (2а — ширина). Ограничимся случаем цилиндрического изгиба, при котором перемещения не зависят от координаты у.
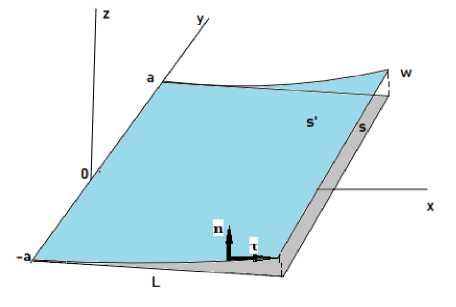
Рисунок 1 - Схема деформирования пластины: S – недеформированная срединная плоскость пластины, S’ – положение точек срединной поверхности после цилиндрического изгиба, 2d —ширина пластины, L —длина пластины, n, т —вектор нормали и касательной к образующей цилиндрической поверхности
Материалы и методы
При цилиндрическом изгибе геометрия пластины фактически задается кривой её срединного волокна в любом сечении у — const. На любой выделенный элемент действует система сил и моментов. Рассмотрим уравнения равновесия пластины, считая, что на неё действуют массовые силы с плотностью G(s, t) и распределенные по поверхности силы с линейной плотностью q(s, t), где s — длина дуги срединного волокна балки 0 < s < L, t —время. Примем в качестве начального состояния, недеформированное горизонтальное положение и будем считать, что срединное волокно не меняет своей длины.
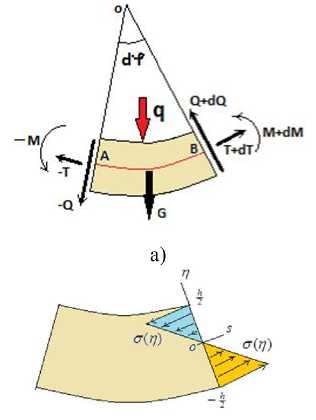
Введём в рассмотрение материальные координаты s,y, ?, вмороженные в упругую среду. В начальном, недеформированном состоянии координата s совпадает с координатой %, координата ? - с координатой z. Примем гипотезу плоских сечений, согласно которой начальные сечения x=const после деформации остаются ортогональными изогнутому нейтральному волокну (Рисунок 2 a-b). В данных предположениях единственной, отличной от нуля деформацией будет растяжение волокна, изначально параллельного координате s. Пусть после изгиба нейтральное волокно составляет в каждой локальной точке с координатой s угол p(s) с осью %. Тогда векторы нормали и касательной (Рисунок 1) можно записать в следующей форме:
т — eX cos p + ez sin p , n = —eX sin Ф + e z cosp (1)
Тогда относительное удлинение (деформацию) волокна с координатой ? можно выразить при помощи радиуса кривизны нейтрального волокна, для которого ? — 0:
? 1 dp
E —RR—ds ,
б)
Рисунок 2 - Схема напряженно-деформированного состояния балки: .а) – выделенный малый элемент балки с действующими на него силами, б) – распределение нормального напряжения в сечении s=const
Воспользуемся законом Гука, связывающим напряжения и деформации в локальной декартовой системе координат с базисом t, e y , n, учитывая, что в силу гипотезы плоских сечений, данные оси являются главными. Кроме того, единственной отличной от нуля деформацией будет деформация етт — е . Деформация по направлению у в силу наших предположений также равна нулю еуу = 0. Используя малую толщину пластины, примем гипотезу о плоском напряжённом состоянии
стпи ~ 0. В результате получим Е Юнга, V — коэффициент Пуассона:
1 ett E — OTT
E = —
—
E 1
—
v2 ^ TT ,
v
v
Ё°уу ^
E nn
—модуль
E yy = 0 = E a yy
—
E°TT ^
C yy — V^ TT , — p (^ TT + O yy ) ^ E nn =
Фактически, закон Гука отношению:
E — —
—
Е
—
v(1+v) E °TT,
сводится к со-
V2
;— ст, где CT — CTTT, (6)
Учитывая (2), (3), получим: Е
ct(s, т?) = y
—
^2E(s,T) = —
Е dp 1 — v2 ? ds,
Е ?
1 — V2 R(s")
Наличие и асимметричный характер распределения действующих в сечении s=const напряжений а приводит к возникновению изгибающего момента M(s) при равной нулю равнодействующей силе:
M = —
J[r x от] dA
A
r = %(s, t)ex + z(s, t)ez, (16)
dx(s, t)
—----= cos—(s, t), ds dy(s, t)
—----= sin—(s, t), (17)
ds
Исключим в уравнениях (6) момент и спроектируем на оси (%, z):
так как:
r x т =
_ 4aE
= (1 — v2)«
h
Jm2dm•e y
= dr
т
e,
e y = D^-e y , (8)
ds
= 0, dQ — cos — — ds
dQ d— dx2
— -sm— —Qcos —- + u —+ d x
d— dz2
Q sin—ds + U gt2" + ^у = 0,(19)
n
I т e y n| |o У m 11 0 0l
= me y
—
yn,
Q = Dd-—,M(s,t) = Dd—, ds2 ds
— = cos —(s, t), — = sin —(s, t). ds ds
Ведём прогиб пластины
(21) w(s, t) =
n a^h3
D = 6(1—v2)"
В выражении (5) D —
называется ци-
z(s, t). В случае малых углов поворота sin — « tg— « — и отсутствии внешних поверхностных сил q = 0 из (19) получим:
dw
линдрической жёсткостью пластины прямоугольной формы с шириной 2a и толщиной h относительно оси изгиба, параллельной у и проходящей через центр тяжести сечения. Помимо нормальных напряжений в сечении действуют и касательные напряжения, равнодействующую которых по сечению обозначим как Q(s) (рис. 2а). Эту силу в технических приложениях называют перерезывающей. Выпишем условия равновесия элемента, показанного на Рисунке 2а. Если оставаться в рамках гипотезы плоских сечений, то Q = Qn, где n — единичный вектор нормали к срединному волокну. Учитывая это, запишем условия равновесия сил и моментов:
d(Qn) + pahdsG + qds = 0, (10) dM + dsт x Qn + dsт x 2pahdsG
+ — т x dsq = 0, (11)
Если пренебречь массовыми силами тяжести, то в качестве массовых сил остаются силы инерции G = —r(s, t). После деления на длину ds и предельного перехода, получим (в согласии с (5), (1)) уравнения движения балки:
x « s, ф d4w
dx, d2w
ds dt2
DTT+^7r = 0, dx4 dt2
d3w
d3w
Q = D —,M = D—, dx3 dx3
Балка скреплена пружиной
заданной
жёсткости k с телом массы m (Рисунок 3). Начальная длина пружины равна Ь 0 , балка находится в горизонтальном недеформиро-ванном состоянии. В момент времени, который мы примем за начало отсчёта t = 0, масса имеет начальную скорость vz = —У0. Необходимо определить совместное движение механической системы: балка-пружина-тело, пренебрегая массой пружины.
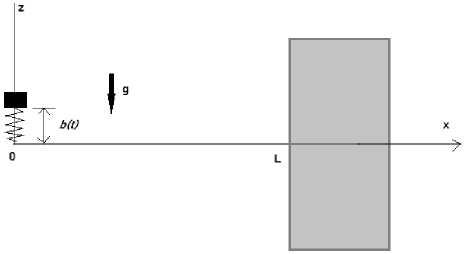
Рисунок 3 – Балка скреплена пружиной заданной жёсткости k с телом массы m
где u = 2pah; dM
ds
—
Q = 0, M(s, t) = Dd—, ds
так как:
т
e
n
т x n =
т e y n
10 0 =
— e y ,
т = — = ex cos - (s, t) + ez sin —(s, t) ds n =—exsin—(s, t) + eycos—(s, t), (15)
Обозначим вертикальную координату тела как z(t). Учитывая прогиб балки, текущая длина пружины будет равна: d(t) = z(t) — W o (t), где W o (t) = w(%, t) i x=o ,5), что позволяет вычислить силу, которая растягивает (или сжимает) пружину F = k(b(t) — b o ) = k(z(t) — w(0, t) — b o ). (26)
Движение тела происходит под действием силы F, взятой с обратным знаком. Учитывая начальные условия, получим для
движения тела определяющие уравнения и
d2Z
—У + q2Z = q2w(0, t) — ^, dt2
со следующими начальными и
гранич-
начальные данные:
mz(t) = — k(z(t) — w(0, t) — bo) — mg(10),
z(0) = b o , z(0) = —V o , w(0,0) = 0, (28)
На левый край пластины % = 0 в момент времени t = 0 начинает действовать поперечная сила Q. Если сила F положительна,
ными условиями: t
|
= 0, w = 0, w = |
0; Z = 0,Z = —r |
; (41) |
|
d2w| x = 0, |
= 0,^1 =f" |
Z —f- |
|
dx2 x =o |
dx3 x=o |
|
|
w(0,t); |
(42) |
|
|
dw |
||
|
x = 1,w| x=i = |
°,d x=i = 0- |
(43) |
Как оказалось, задача (39), (41) зависит от следующих безразмерных параметров:
то есть пружина растягивается, то поперечная сила направлена вверх. Наоборот, кода пру-
жина сжимается, поперечная сила направлена
вниз. С учётом этого уравнения и условия для
p2
D
Eh2
^L2V02 12(1 — v2)pL2V02 ,q
пластины будут такими: 94w 92w
D^%4 + ^^t2 = t = 0, w = 0, w = 0;
92w x = 0,M = D I ,Q
9x2
x=o
= k(z(t) — w(0, t)
0,0 < x < L; (29)
(30) 92w = Dd% 2 | x=o
_ kL2 mVo2
_ kL3
= ^”,
g l
^ = LV o ,r = h,f
Будем решать задачу с использованием интегрального преобразования Лапласа [3, 7, 8] по времени:
— b o ); (31)
x = L,w|x=l = 0,9W| =0. (32)
9x x=L
u(t) ^образ
/ u(t) exp(—st) dt, i(s) ^оригинал d+i™
i(s) =
Результаты и обсуждение
Для удобства численных расчётов перейдём к безразмерным переменным (со знаком звёздочки):
x = Lx*, w = hw*, t = L/y t*, z = hz*, bo = hb0, 0 (33)
Общая система уравнений (27), (28)
примет вид:
h 94w * hVo2 92w *
DL45x;4+^ L2 9t * 2
= 0,0 < x *
< 1, (34)
hV ) 2 d2z *
mJ dt^ = —kh(z * — w * (0, t * ) — b 0 )
— mg, (35)
t * = 0,w * = 0,w * = 0; z * = bo^z *
u(t) = -—-. f iz(s) exp(st) ds. (46)
2rn d-i™
Применим к уравнениям (39) и условиям (40) преобразование Лапласа (45):
э э 94?w s2w + p2 ——г = 0,0 < x < 1
9x4
s2T + r + q2T = q2iv(0, s) — ^ x =
92w9
0, I = 0, I
9x2 x =o 9x3 x=o
= f-Z — /-w(0,s);(47);
x = 1,w|x=i = 0,9W| =0,(48)
9x X=1
Второе уравнение позволяет исключить образ Z(s) и свести определение образа w(x, s) к следующей краевой задаче:
x * = 0,
92w *
9x * 2
= —V o ;
h 93w*|
I^ 9x*3L
s2w + p2
x
= kh(z * — w * (0, t * )
— b 0 ); (37)
9w *
x * = 1,w * |x *= 1 = 0,—|^_i = 0. (38)
Для удобства, введём замену функции Z * (t * ) = z * (t * ) — b 0 , и не будем писать знак звёздочки, понимая все переменные безразмерными. В результате получим следующую формулировку задачи – решить совместно си-
4:
q2
s2 + q2
—
—
f'P
s(s2 + q2);
x = 1,iv|x =i
94w
— ^^x^, (49)
92w|
= 0, I
9x2 L=o
1)-w(0,s) —
93w|
= 0, |
9x3 x=o
/ ■ r s2 + q2
=0,3
9x I
~
t; =
—
= 0.
X=1
r
—
стему уравнений:
92w 94w ip-^M^1 (39)
+
q
s2 + q2 s(s2 + q2)
s2 + q2
w(0,s), (52)
Решая дифференциальное уравнение находим:
w̃(x, s) = C 1 ∙ enx(-s 2 ) 4 +C 2 ∙ e-nx(-s 2 ) 4
+ C3 ∙ einx(-s2)4 + C4
∙ e -inx(-s2)4 ,
Где коэффициенты С1,С2,С3,С4 имеют следующий вид:
C1(s) = -1(f(rs+ β)(ie(1+i)n(-s2)4 -ie(-1+i)n(-s2)14 - 2 - e(1+i)n(-s2)14 - e(-1+i)n(-s2)4)/((4i(-s2)4n3q2 + ifs2e(-1-i)n(-s2)14 - ie(1+i)n(-s2)14fs2 + 31
i(-s 2 )4n 3 s 2 e (-1+i)n(-s )4 +
i(-s 2 )4n 3 s 2 e (1-i)n(-s ) +
i(-s2)4n3q2e(1+i)n(-s ) + ifs2e(-1+i)n(-s2)4 +
i(-s 2 )4n 3 q 2 e (-1-i)n(-s )4 +
i(-s 2 )4n 3 s 2 e (1+i)n(-s ) +
3 1 i(-s 2 )4n 3 s 2 e (-1-i)n(-s ) +
i(-s 2 )4n 3 q 2 e (-1+i)n(-s )4 +
i(-s 2 )4n 3 q 2 e (1-i)n(-s )4 + 11
fs2e(-1+i)n(-s2)4 - fs2e(-1-i)n(-s2)4 + fs2e(1+i)n(-s2)4 - fs2e(1-i)n(-s2)4 +
4i(-s2) 4 n3s2 - ie(1-i)n(-s 2 ) 4 fs2) s); (54)
C2(s) = 1(f(rs+ β)(ie(1-i)n(-s2)14 + 2i+ ie(1+i)n(-s2)14 + e(1-i)n(-s2)14 - e(1+i)n(-s2)4)/((4i(-s2)4n3q2 + ifs2e(-1-i)n(-s2)14 - ie(1+i)n(-s2)14fs2 + 31
i(-s 2 )4n 3 s 2 e (-1+i)n(-s ) +
i(-s 2 )4n 3 s 2 e (1-i)n(-s ) +
i(-s2)4n3q2e(1+i)n(-s )4 + ifs2e(-1+i)n(-s2)4 +
i(-s2)4n3q2e(-1-i)n(-s )
i(-s2)4n3s2e(1+i)n(-s )
i(-s 2 )4n 3 s 2 e (-1-i)n(-s )4 +
i(-s2)4n3q2e(1-i)n(-s )
fs2e(-1+i)n(-s2)4 - fs2e(-1-i)n(-s2)4 + fs2e(1+i)n(-s2)4 - fs2e(1-i)n(-s2)4 +
4i(-s2) 4 n3s2 - ie(1-i)n(-s 2 ) 4 fs2) s);
C 3 (s) = 1 (f(rs+ β)(ie(1-i)n(-s 2 ) 4 - ie(-1-i)n(-s2) 1 4 + 2 + e(1-i)n(-s2) 1 4 +
e(-1-i)n(-s2)4)/((4i(-s2)4n3q2 + ifs2e(-1-i)n(-s2)14 - ie(1+i)n(-s2)14fs2 +
i(-s 2 )4n 3 s 2 e (-1+i)n(-s )4 +
i(-s 2 )4n 3 s 2 e (1-i)n(-s ) +
i(-s2)4n3q2e(1+i)n(-s ) + ifs2e(-1+i)n(-s2)4 +
i(-s 2 )4n 3 q 2 e (-1-i)n(-s )4 +
i(-s 2 )4n 3 s 2 e (1+i)n(-s ) +
i(-s 2 )4n 3 s 2 e (-1-i)n(-s ) +
i(-s 2 )4n 3 q 2 e (-1+i)n(-s )4 +
i(-s2)4n3q2e(1-i)n(-s )4 + fs2e(-1+i)n(-s2)14 - fs2e(-1-i)n(-s2)14 + fs2e(1+i)n(-s2)4 - fs2e(1-i)n(-s2)4 +
4i(-s2) 4 n3s2 - ie(1-i)n(-s 2 ) 4 fs2) s);
C 4 (s) = - 1 (f(rs+ β)(ie(-1-i)n(-s 2 ) 4 + ie(-1+i)n(-s2) 1 4 +2i-e(-1-i)n(-s2) 1 4+
e(-1+i)n(-s2)4)/((4i(-s2)4n3q2 + ifs2e(-1-i)n(-s2)14 - ie(1+i)n(-s2)14fs2 +
i(-s 2 )4n 3 s 2 e (-1+i)n(-s )4 +
i(-s 2 )4n 3 s 2 e (1-i)n(-s )4 +
i(-s2)4n3q2e(1+i)n(-s )
ifs2e(-1+i)n(-s2)4 +
i(-s2)4n3q2e(-1-i)n(-s )
i(-s 2 )4n 3 s 2 e (1+i)n(-s )4 +
i(-s2)4n3s2e(-1-i)n(-s )
i(-s2)4n3q2e(-1+i)n(-s )
3 1
i(—s2) 4 n3q2e(1-i)n(-s )4 + fs2 e (-1+i)n(-s2)4 - fs2e(-1-i)n(-s2)4 + fs2 e (1+i)n(-s2)4 - fs2e(i-i)n(-s2)4 +
4i(-s2) 4 n3s2 — ie(1 i)n( s2 ) 4 fs2)s);
Простым вычислением и подстановкой находим функцию координаты тела:
л q2(^ i + £ 2 + £ 3 + £ 4 )
z(s)=----q 2TP-----
-
r
Функция "W прогиба балки
a)
s(q2 + s2)
-
q2 + s2 ;
Возьмем следующие значения для па- раметров:
p = 500^,E = 2,0 • 1010na,v = 0,3, a = 0,5 м, h = 0,1 м, L = 1,5 м, V0 = 1 м/с, k =
-
10 4 H/ M ,m = 70 кг. (59)
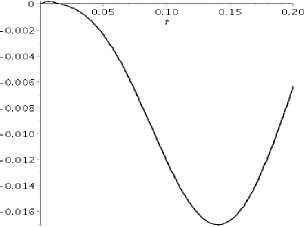
Используя метод Дурбина находим оригиналы функций прогиба и координаты тела (Рисунок 4 a-b):
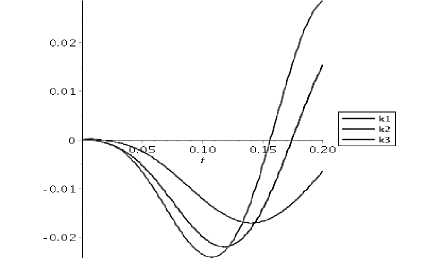
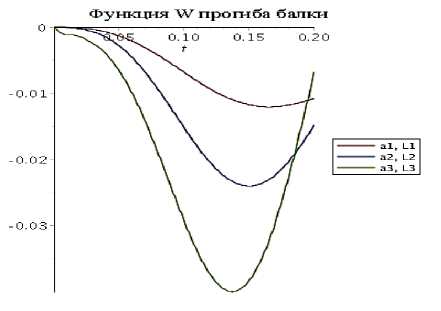
Проверим зависимость функций прогиба балки и координаты тела от параметров жесткости пружины и размера балки:
-
а) жесткость пружины (Рисунок 5 a-b):
k1 = 10 4 Н/м,к2 = 2 • 104Н/м,к3 =
3 • 104Н/м (60)
-
б) размер балки (Рисунок 6 a-b):
a1 = 0,5 м, a2 = 0,7 м, a3 = 0,9 м, L1 =
-
1,5 м, L 2 = 2 м, L3 = 2,5 м, (61)

б)
Рисунок 5 – Зависимость функций прогиба балки и координаты тела от параметров жесткости пружины
a)
Функция W прогиба балки
a)
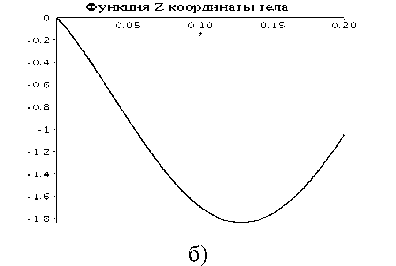
Рисунок 4 – Оригиналы функций прогиба и
координаты тела
Функция Z координаты тела
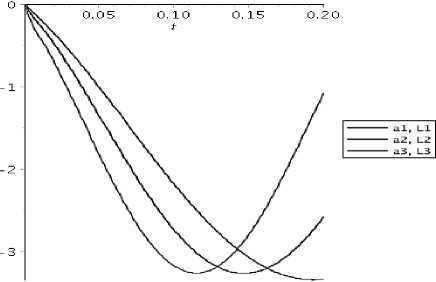
б)
Рисунок 6 – Зависимость функций прогиба балки и координаты тела от размера балки
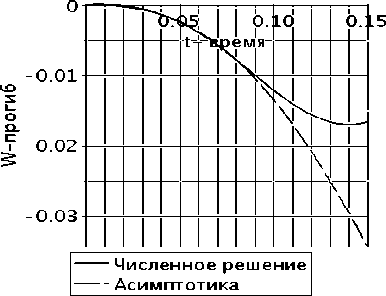
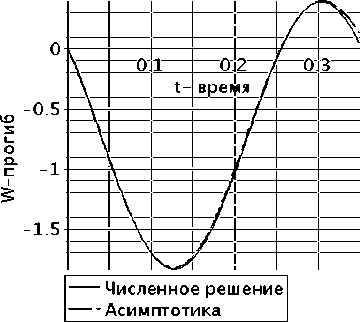
Сравнение аналитического и численного метода Дурбина [5, 9, 10]. Покажем, что аналитическое и численное решение обратного преобразования Лапласа [3] методом Дурбина [5] на малых промежутках времени совпадают (Рисунок 7 a-b).
Сравнение численного и асимптотического (для малых значений времени) решений
a)
Движение груза. Сравнение числ. и аснмпт (для малых значений времени) решений
б)
Рисунок 7 – Сравнение аналитического и численного метода Дурбина
Выводы
С помощью условия равновесия сил и моментов построена система уравнений решения задачи нагружения балки пружиной с закрепленной массой. Использовав прямое преобразования Лапласа система уравнений была значительно упрощена. Решив дифференциальное уравнение был найден образ функции прогиба, а постановкой – образ функции движения тела. Численный метод Дурбина обращения интегрального преобразования Лапласа в данной задаче является применимым.
Метод дает результаты, на начальном малом участке времени совпадающие с анали- тическим решением. Подстановкой конкретных чисел в параметры решений были построены графики функции прогиба и функции координаты тела от времени.
Для сравнения зависимости функций от параметров жесткости пружины и размера балки были построены графики этих функций от данных параметров при различных их значениях. Было выяснено, что при увеличении жесткости пружины значения функции прогиба и функции координаты тела также увеличиваются. А при увеличении жесткости балки значения функции прогиба и функции координаты тела уменьшаются. Этот результат полностью отражает практическую постановку.
Список литературы Динамика пластины с упруго присоединённой массой
- Баргуев С.Г. Колебания неоднородной балки с упруго присоединённым телом с двумя степенями свободы. Улан-Удэ: Наука, 2017. С. 80-85.
- Мижидон А.Д., Цыцыренова М.Ж. Обобщенная математическая модель системы твердых тел, установленных на упругом стержне. Вестник ВСГУТУ 2013, 6: 5-12.
- Лурье А.И. Операционное исчисление и его приложение к задачам механики. Москва: Государственное издательство технико-теоретической литературы, 1951. 431 с.
- Крылов В.И., Скобля Н.С. Методы приближенного преобразования Фурье и обращения преобразования Лапласа. Москва: Наука, 1974. 223 с.
- Durbin, F. 1974. Numerical inversion of laplace transforms: an efficient improvement to Dubner and Abate's Method. The Computer Journal, 17: 371-376.
- Туркова В.А., Степанова Л.В. Различные режимы циклического нагружения неупругой пластины: конечно-элементный анализ двухосного нагружения упругопластической пластины с эллиптическим вырезом. Вестник ПНИПУ. Механика, 2016, 3: 207-221.
- Баргуев С.Г. К исследованию колебаний твердого тела с двумя степенями свободы на балке Эйлера-Бернулли. Сборник научных трудов по материалам VII Международной научно-практической конференции. Горки: БГСХА, 2016. С. 18-21.
- Cha, P.D. 2007. Free vibrations of a uniform beam with multiple elastically mounted two-degree-of-freedom systems. Journal of Sound and Vibration, 307(1-2): 386-392.
- Wu, J.-J., Whittaker, A.R. 1999. The natural frequencies and mode shapes of a uniform cantilever beam with multiple two-DOF spring-mass systems. Journal of Sound and Vibration, 227(2): 361-381.
- Миджидон А.Д., Баргуев С.Г. О вынужденных колебаниях механической системы установленной на упругом стержне. Современные технологии. Системный анализ. Моделирование, 2004, 1, 32-34.
