Динамика полишарнирных механических систем

Автор: Поляков аЛ.аФ., Поляков аР.аЛ.
Рубрика: Теоретичские исследования
Статья в выпуске: 22 (94), 2007 года.
Бесплатный доступ
Рассматривается динамика полишарнирных механических систем. Приводится обобщенная динамическая модель, которая учитывает влияние на динамический процесс кинематики универсальных шарниров, углов перекоса осей валов, упруго-вязкого демпфирования. Приведены: математическая модель, описываемая системой нелинейных дифференциальных уравнений; результаты расчетов динамических нагрузок и коэффициентов; зоны различных видов резонансов; критерии оптимизации по снижению динамических нагрузок в данных системах.
Короткий адрес: https://sciup.org/147154176
IDR: 147154176 | УДК: 621.083
Текст научной статьи Динамика полишарнирных механических систем
Поляков Алексей Афанасьевич Екатеринбург, зав. каф. стр. механики УГТУ-УПИ, д.т.н., профессор
Поляков Артем Алексеевич Екатеринбург, зам. главного конструктора по новой технике ЗАСГУромгаз”, к.т.н.
Двухшарнирные и полишарнирные механические передачи и состоящие из них системы нашли широкое применение в различных отраслях промышленности таких как транспортная, нефтегазовая, металургическая и т.д. При этом, шарнирные системы могут быть плоскими (оси валов, связанные с шарнирами, находятся в одной плоскости) и пространственными [1, 3, 5].
Исследование динамики плоских шарнирных систем при определенных ограничениях рассматривалась в работах [1-3], где показано, что в таких системах возникают вынужденные колебания, неустойчивые движения и различные резонансы.
Например, в приводах исполнительного органа очистных машин [1-3] используются пространственные, шарнирные, механические системы. Динамические процессы, происходящие в них, имеют более сложный характер, так как системы с пространственными шарнирами позволяют передавать нагрузки и вращение между валами с пересекающимися осями в широком диапазоне статических и динамических параметров.
Характерной особенностью механических шарнирных систем является наличие в них пространственных шарниров, вызывающих неравномерность вращения звеньев и связанные с ними колебания [2, 3]. Колебания возникают даже тогда, когда внешние моменты, приложенные к ведущим и ведомым звеньям, постоянны.
Таким образом, сама механическая шарнирная система является источником крутильных колебаний, неравномерности вращения звеньев, и в сочетании с другими источниками колебаний (ведущим и исполнительным органами) могут приводить к значительным динамическим нагрузкам как в самом приводе, так и на его выходе, а также к вибрациям оборудования и конструкций.
Рассматривается динамика полишарнир-ных механических систем. Приводится обобщенная динамическая модель, которая учитывает влияние на динамический процесс кинематики универсальных шарниров, углов перекоса осей валов, упруго-вязкого демпфирования. Приведены: математическая модель, описываемая системой нелинейных дифференциальных уравнений; результаты расчетов динамических нагрузок и коэффициентов; зоны различных видов резонансов; критерии оптимизации по снижению динамических нагрузок в данных системах.
При определённых соотношениях статических и динамических параметров в приводе с пространственными шарнирами могут возникнуть неустойчивые состояния, сопровождающиеся повышением уровней упругих колебаний, параметрические колебания и параметрический резонанс, оказывающие существенное влияние на нормальный режим работы оборудования и эксплуатационную надёжность. Поэтому исследование динамических явлений необходимо для установления рациональных режимов и создания, в конечном итоге, надёжной и экономичной техники.
В рассматриваемой работе приводятся исследования динамики привода рабочего органа, представляющего собой разветвленную многосвязанную систему с пространственными шарнирами [2-4].
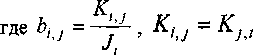
Характерная такой системе динамическая модель представлена на рис. 1, которая учитывает влияние на динамический процесс всех основных факторов: кинематической особенности шарниров, статических и динамических параметров системы.
Динамическая модель описывается системой нелинейных дифференциальных уравнений, полученной на основе использовании квазистатического способа, при непосредственном применении принципа Даламбера.
После преобразования данной системы к виду удобному для компьютерной реализации с помощью численного метода интегрирования Рунге-Кутта, уравнения системы имеют вид:
---”^2/ ^1,2W (О


(^2 -Уз)Лзк -^з);
^--у^ + у^^-^зЬбз.г^г-^з)-
—^-(^3 -УзУЬз^з"УзУ
-
• -^-(^3-^7)-63,7 (^3-^7);
-
• ■ МС Д Sy , X S7 J3 zх
Vi =——+— +-y-(^7 ~^13/“
Лдз^ -^+hAv3 -1/7);
S1 13•
13 ~~ 1/7,13 + ^7,13^7,13 “
S\3,W ( . V MTp,I ,
-
-yu)Fx - —;
■ ■ ^13,14 ( * ) , Д * ■)
1/14 =-y—Г13 ~^14 J" *14,15^14 — 1/15/ /14
C /x
°14,15 / *
-
7— Г14 ~1Z15 Л
■ ■ ^14,15 ( * \ , ( ■ • . )
1/15 ~ ; У 14 ~ 1/15/+615,14 у 14 ”1/15/
^15,16 ( « ^ Tp Л
J15 J15
1/16 =у^(/15 * 1/16 )" ^16,8 (/16 ”l/s‘)” /16
^16,8 ( • )
У 16 "^вД
J16
1/8 =~ 7~ ^16 -1/8 /+ "8
+^8,16 У16 -1/8
1/9 =y^(l/5 -I/9) + \5(l/5 -I/9)-
^9,10
( * \ MTpX
I1/9-1/10 Л-- 1 ’
$12,6 / *
--— Г12 "l/б
J12
1/б =—11/12 -1/бу612б11/12 -^бУ—Т-
В уравнениях (2) точкой обозначено дифференцирование по времени t. При этом параметры, входящие в эти уравнения обозначают: у* - уг лы поворота z-й массы, имеющие явную кинематическую связь с углами поворота (z-1) массы [рад]; К^ - коэффициенты пропорциональности между величиной потерь внутреннего трения в упругой связи, выраженной в размерности момента, и величиной относительной скорости перемещения масс [Н-м-с]; Мд - момент на двигателе [Н м ]; Mc-i- момент вязкого трения в элементах 1-й массы [Н-м]; М^д- момент трения в z - ом пространственном шарнире [Н-м]; Мт3 - технологический момент, приложенный к z-й массе [Н-м]; Jj - момент инерции z-го элемента системы [Н-м-с2]; Sy - жесткось i,j-ro вала [Н-м/рад]; F, -кинематические функции.
Кинематические функции (F^, входящие в уравнения (1), зависят от типа механической шарнирной передачи и ее параметров.
Так, для одной из линий привода рабочего органа (выделенной на рис. 1 пунктирным прямоугольником) механическая шарнирная передача включает три звена (5,13; 14,15; 16,6), связанных между собой двумя универсальными шарнирами. Подробно фрагмент этой передачи приведен на рис. 2. Применительно к выделенному фрагменту (рис. 2) кинематические функции Fx и F2 соответствуют случаю, когда оси всех валов расположены в разных плоскостях (у, * 0, у2 * 0, Pt * 0, р2 * 0), имеют аналогичный вид, в частности для Fx;
созД cossin2 Д sin2 ух
F ----------------------------’
Г где г = cos2 /] +(sin2 /х - sin2 Д )sin2 р13 +
1^10 -~7~V9 -1/10/-^10,11 /10
C / X
7 у 10 ~Уп)>
]! - . , У10 -1/ц /+610,liyi0 “1/ц,
/11
$11,12 / * У ^Тр,3
/п /ц
„ ^11,12
1/12 =-T-/12
+0,25 sin 2ух sin 2Д sin 2^13.
Исследовано влияние на динамические на грузки углов перекоса шарниров, приведенных моментов инерции, угловых скоростей, жесткостей звеньев, технологических моментов. Для примера приведен график рис. 3.
Определены динамические коэффициенты и установлены зоны резонансов для различного сочетания параметров системы в качестве примера на рис. 4. приведен график изменения динамических коэффициентов на котором четко наблюдаются как основные так дробные резонансы.
Теоретические исследования
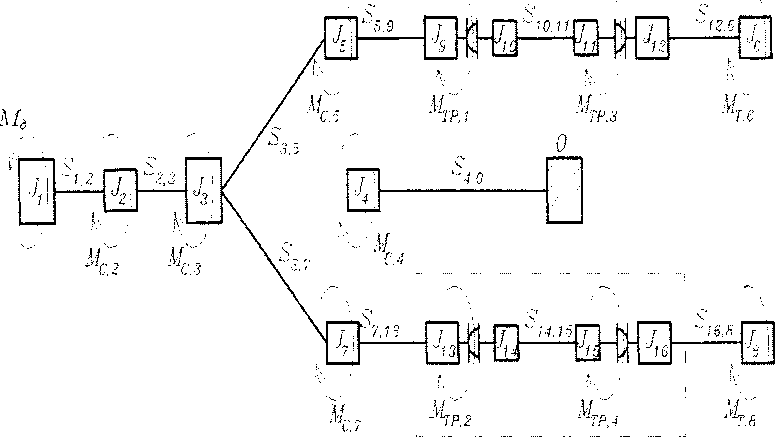
Рис. 1. Динамическая модель рабочего органа
Ма - момент на двигателе, J, - момент инерции /-го элемента системы, Sy - жесткось /", у-го вала, Мс, - момент вязкого трения в элементах i-й массы, MTp,i - момент трения в i-м пространственном шарнире, Мт,1 - технологический момент, приложенный к /-й массе
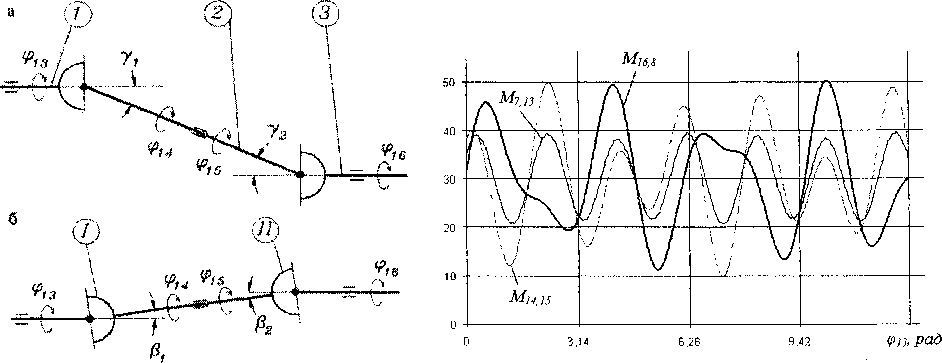
Рис. 2. Пространственная двухшарнирная передача (фрагмент из рис. 1):
а - вид фронтальной проекции, 1- ведущий вал, 2 -промежуточный вал, 3 - ведомый вал; б - вид передачи в плане; l,ll - универсальные шарниры,
Yi, Y2, ₽i, Р2 - углы между геометрическими осями (углы перекоса), соответственно 1-го и 2-го, 2-го и 3-го валов
Решена задача поиска рационального угла относительного расположения двухшарнирных передач, входящих в разветвленную систему рабочего привода, обеспечивающего минимальные динамические нагрузки в системе [4]. При этом, для оценки неравномерности нагрузок использованы два критерия неравномерности момента передаваемого на вал двигателя:
-
1. Критерий К\ - среднее значение за период модуля разности моментов на ведущих звеньях передач:
-
2. Критерий Кг - максимальное значение разности моментов на ведущих звеньях:
Kx=-\^\MS1-MT\dt, (3)
f о-=1'
Рис. 3. Изменение динамических моментов в звеньях шарнирной передачи в зависимости от угла поворота ф13 ведущего звена при о>=30 с"1 : М7|13 - ведущего; MM,i6 - промежуточного; Mi6,s - ведомого где i = 1,2,...т зависит от количества шарнирных передач, входящих в систему привода, Ms., -суммарный момент, передаваемый на звенья двигателя от всех шарнирных передач.
П1
1=1
На рис. 5 представлены некоторые результаты расчета, в частности, графики распределения Кх и ЛЗ от угла а относительного расположения шарнирных передач.
Рис. 4. Изменение динамических коэффициентов Kaij=f(w) в звеньях шарнирной передачи от угловой скорости ш: Кд7,13 ,КЯ14,16, /(gie.s - ведущего, промежуточного, ведомого звеньев, соответственно
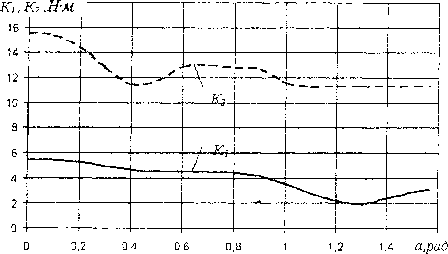
Рис.5. Графическая зависимость критериев Ki=f(a) и K2=f(a) при ш=70 с-1 от угла а относительного расположения шарнирных передач
Минимуму первого критерия соответствует угол а6 при котором среднее значение модуля разности моментов за время / -минимально.
Минимуму второго критерия соответствует угол а„ при котором максимальное значение модуля разности моментов - минимально.
Анализ результатов динамических нагрузок и влияния различных факторов на поведение динамической системы показал что существует возможность для рекомендации по выбору параметров системы, при которых динамические нагрузки имеют минимальные значения и исключается риск возникновения резонансов в системе
Список литературы Динамика полишарнирных механических систем
- Поляков, Ал.Аф. Исследование прочности комбинированных шарнирных систем/Ал.Аф. Поляков, Ар.Ал. Поляков//Строительство и образование: Сборник научных трудов. Вып. Екатеринбург: УГТУ, 2000.-С. 77-79. 2.
- Поляков, Ар.Ал. Динамические нагрузки в механической системе исполнительного механизма очистной машины/Ар.Ал. Поляков. Ал.Аф. Поляков//Изв. вузов. Нефть и газ. -Тюмень. ТюмГНГУ, 2003, №6. -С. 61-66.
- Поляков Ар.Ал. Динамика разветвленной механической системы с универсальными шарнирами/Ар.Ал. Поляков, Ал.Аф. Поляков//Изв. вузов. Нефть и газ. -Тюмень. ТюмГНГУ, 2004, №1. -С. 69-74
- Поляков А.А. Оптимизация параметров привода рабочего органа очистной машины.//Изв. вузов. Нефть и газ. -Тюмень: ТюмГНГУ, 2004, №2. -С. 64 -67
- Поляков, А.А. Устройство для очистки наружной поверхности трубопроводов/А.А. Поляков, А.А. Артемкин, Э.С. Батюшев//Авт. свид. №1814934 Б.И., 1993, №18 6.
- Поляков, А.А. Способ очистки полимерных покрытий с поверхности трубопроводов/А.А. Поляков, Э.С. Батюшев, В.В. Житков и др.//Патент РФ №2060006. Б.И., 1996, №16.
