Динамика пространственного движения роторной системы в задачах динамической диагностики

Автор: Чувейко Михаил Викторович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 1-1 (62) т.12, 2012 года.
Бесплатный доступ
Рассмотрено применение кватернионной кинематики для построения математической модели роторной системы, осуществляющей пространственное движение.
Динамика роторных систем, кватернионы, параметры родрига-гамильтона
Короткий адрес: https://sciup.org/14249746
IDR: 14249746 | УДК: 519.248.6
Dynamics of rotor system spatial motion in dynamic diagnostics
The application of the quaternion kinematics for building a mathematical model of the rotor system engaged in three-dimensional motion is considered.
Текст научной статьи Динамика пространственного движения роторной системы в задачах динамической диагностики
Введение. При построении систем динамической диагностики узлов трения в роторных системах типичной задачей является выяснение взаимосвязи изменяющейся геометрии контактирующих поверхностей с наблюдаемыми координатами. Для этого, прежде всего, необходимо создать математическую модель динамики диагностируемого объекта. Рассмотрим методику построения модели роторной системы.
В большинстве случаев роторные системы представляют собой тела (валы), имеющие две различные точки закрепления в подшипниках. Для математического описания роторной системы, совершающей пространственное движение, необходимо задать две системы дифференциальных уравнений: систему, определяющую динамику движения центра масс, а также динамику сферического движения.
Уравнение Эйлера в параметрах Родрига–Гамильтона. Обозначим неподвижную прямоугольную систему координат как X = [ Х 1 х2 Х 3 ] , где Д - орты соответствующих осей (рис. 1). Кроме того, свяжем с валом подвижную прямоугольную систему координат Y = [ у 1 у 2 у3 ] , где уj - орты соответствующих осей. Причем, выберем Y так, чтобы начало системы координат совпадало с центром масс вала c , а оси совпадали с главными осями инерции вала в точке c . Тогда, в соответствии с теоремой о движении центра масс [1], первая система уравнений примет вид:
mс X = F , i = й , (1)
где сiX – координаты точки c (центра масс) в X ; FiX – проекции главного вектора внешних сил F на оси в X ; m – масса вала.
Рис. 1. Обобщенная роторная система
Вторая система дифференциальных уравнений, определяющая сферическое движение твердого тела, как известно, описывается уравнениями Эйлера [1]:
J 1 m Г + ® Г m 2 ( J 3 - J 2 ) = M Y ,
* J 2 m 2 +Ю Г m Y ( J 1 - J 3 )= M Y , (2)
j3m 3+m Y mY ( j2 - j1 )=mY, где Mi, mY - проекции соответственно главного вектора внешних моментов M и угловой час- тоты на оси Y ; Ji – моменты инерции.
Очевидным недостатком уравнений (2) является то, что они представлены в подвижной системе координат. Кроме того, из них явным образом не следуют динамика положения вала, так как m Y задает лишь его «скорость изменения». Для устранения последнего недостатка необходимо задать способ представления вала в пространстве, т. е. такую систему переменных, которая бы однозначным образом определяла ориентацию вала, и выразить m Y через данную совокупность переменных. Существуют различные способы решения данной проблемы. В качестве таких переменных нами использованы так называемые параметры Родрига–Гамильтона.
В соответствии с теоремой Эйлера–Даламбера, абсолютно твердое тело из произвольного начального положения может быть переведено в любое другое положение (при сферическом движении) посредством лишь одного конечного поворота вокруг некоторой оси O ^ на угол ф . Это свойство положено в основу кватернионной кинематики сферического движения твердого тела [2]. Исходя из нее любое положение твердого тела (относительно некоторого начального) 3
может быть описано посредством кватерниона Л = Х о + ^ i i X i , где X i - параметры Родрига- i =1
Гамильтона, i i – кватернионные единицы. Кватернионные единицы могут быть ассоциированы с ортами x , х2 , Х 3 , т. е. будет иметь место x = i i . При этом говорят, что кватернион представлен в базисе X . В дальнейшем рассмотрены лишь кватернионы в X . В кватернионной кинематике на параметры Родрига–Гамильтона налагают условие нормировки:
х о 2 +х 2 +х 2 +х 2 = 1 . (3)
Для любого вектора V , представленного координатами VX в неподвижном базисе X , можно найти его координатное представление в базисе Y по формуле:
V i = PV , (4)
где P – матрица направляющих косинусов, определенная как
2 ( Х , Х 2 +X o X 3 ) 2 ( Х , Х з -Х о Х з ) " Х о 2 - Х 2 + X 2 - Х 3 2 ( Х 2 Х 3 + X о х , ) .
2 ( х 2 х 3 -хд ) х о -х 2 -х 2 +х 3 2
Х о 2 +Х^
-
х
-
х
P = 2 ( Х,Х 2
-
Х о Х 3 )
2 ( Х,Х 3 +Х о Х 2 )
Установим связь между проекциями вектора угловой частоты m на подвижные оси Y и параметрами Родрига–Гамильтона. Для этого используем кинематическое уравнение Пуассона:
• 1
Л = -Л о m , (5)
где символ « о » обозначает операцию кватернионного умножения.
Используя матричное представление кватернионов [2], можно получить координатную запись данного выражения:
|
'm Y = 2 ( х о; Х , -х , Х о -х 2 Х 3 |
+ Х3>Х 2 ) , |
|
m Y = 2 ( хо;Х 2 -х 2 X о +х,;Х 3 |
-Х 3 Х , ) , (6) |
|
m i = 2 ( х о; Х 3 -х , Х 2 +х 2 Х , |
-Х 3 Х о ) . |
Подставив уравнения (6) в уравнения динамики сферического движения (2), получим систему уравнений динамики сферического движения в параметрах Родрига–Гамильтона. Причем условие нормировки (3) необходимо рассматривать в качестве одного из первых интегралов движения. Однако полученная система имеет неудобную форму для проведения численного моделирования. Получим более компактную форму. Из формулы (6), а также из условия нормировки, несложно видеть, что имеет место:
/г
•
Y
Y
Y у :
Ю 3 Ю-
Ю , Ю
Ю 2 Ю,

Х 1
X 0
-Х з
Х 2
Х 2
Хз
Х о
■ X1
Х з
-Х 2
Х 1
Х о
Х о
-Х 1
-Х 2
Х о
Х 1
Х 2
-Х 1
-Х 2
-Х з
Х 1
Х о
—Х з
Х о
Х з
-Х з
Х 2
Х 2
Х 3
Х о
Х о
-Х 1
•
Х о
•
Х ,
•
Х 2
•
.Х з j
Х 3
-Х 2
Х 1
,
Х 3
-Х 2
Х 1
Х о
•
х,
([ о
-Х 3
Х 2
-Х 1
Х о
•
Х о
1\
•
Х 1
•
Х 2
•
•
X , з jy
1\
•
Х 1
•
Х 2
•
,
. Хз jy
где под символом « • » подразумевается операция поэлементного умножения.
Операция поэлементного умножения определяется следующим образом: если A = [ a ij j и
B = [ b ij j , то матрица, определенная как C = A • B , будет состоять из элементов c ij = a ij b ij .
м 0 = [- 2 ( Х 0 + Х 2 + Х 2 + Х 3 ) о о o j т .
Введем следующие обозначения:
|
■Х о " |
■ Х о |
Х 1 |
Х 2 Х з |
1 |
■ о |
о о 1 |
||||||||||||||
|
Х |
— |
Х 1 Х 2 |
, Л |
— |
-Х 1 -Х 2 |
Х о -Х з |
Х з -Х 2 Х о Х 1 |
, |
K = |
1 о |
00 10 |
, |
||||||||
|
. |
Х з j |
.-Х з |
Х 2 |
Х 1 Х о |
j |
. о |
о 1 j |
|||||||||||||
|
■ 1 |
0 |
0 |
о " |
■ 1 |
0 |
0 |
о " |
■ |
1 |
0 |
0 |
о 1 |
||||||||
|
T = |
о о |
0 1 |
0 0 |
1 0 |
, J |
= 2 |
о о |
J 1 0 |
0 J 2 |
0 0 |
, G = 4 |
о о |
J 3 |
- J 2 0 |
0 J 1 - |
J 3 |
о о |
|||
|
. о |
0 |
1 |
о . |
. о |
0 |
0 |
J з j |
. о |
0 |
0 |
J - J J 2 J i j |
|||||||||
Тогда, с учетом вышесказанного, уравнение Эйлера (2) в параметрах Родрига–Гамильтона будет иметь вид:
J AX + G [(TNX )•( TTNX )] = Ml6 + KMY,(10)
или в неподвижной системе координат X :
X = ЛTJ-1 (KPMX + M0 - G[(TNX) • (TTNX)]) .(11)
Уравнения движения обобщенной роторной системы. Обозначим точки закрепления вала в подшипниках как a = £ x^, и b = £ xb, (рис. 2). Кроме того, будем полагать, что а3 и b3 оста-i=1
ются неизменными независимо от вращения основного вала. Обозначим вектор силы, порождаемый динамической связью (силовой функцией), в точках a и b соответственно Fa и Fb , а суммарный момент трения – Mab . Принимая l за длину вала и используя матрицу P , несложно получить значения координат a и b :
|
a = c + 1 (X 1 X 3 + X q X 2 ) 1 1 x 0 2 -x 2 -x 2 +xV 1 ( X2X3-X0X, ) 1 a 2 = c2 + 2 2 22 T-J2T, и X 0 -X 1 -X 2 +X 3 a 3 = c 3 + 1 /2 |
f 1 ( X 1 X 3 +X 0 X 2 )
, = 1 (X 2 X 3 -X 0 X 1 )
b 3 = c 3 - 1 /2. |
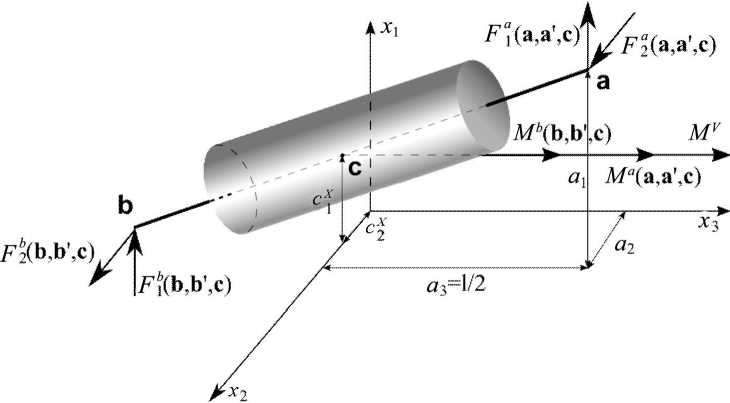
Рис. 2. Обобщенная роторная система
Будем считать, что на основной вал действует суммарный, внешний по отношению к роторной системе, момент M V и сила FV . Тогда, учитывая, что суммарный момент, действующий на основной вал, можно определить по формуле:
M = M f V + M f ab + a x Fa + b x Fb , (13)
и используя (12), получаем:
MX = L ( F b - F a ) + M V + M ,
где M V , M ab , Fb , Fa – вектор-столбцы с координатами соответствующих векторов в X ;
L – матрица длин, определяемая как
|
г 0 |
l |
2 1 ( X 2 X 3 -X o X i ) " x o -X 2 -x 2 + X 3 |
|
|
L = |
- 1 |
0 |
2 1 ( X 1 X 3 +X o X 2 ) |
|
x 0 -X 2 -X 2 + X 2 |
|||
|
2 1 ( Х 2 Х з -X 0 X 1 ) |
2 1 ( X 1 X 3 +X 0 X 2 ) |
0 0 |
|
|
L х 2 -x 2 -x 2 +x 2 |
x 0 -x 2 -x 2 +x 3 2 |
Исходя из вышесказанного получим систему уравнений, определяющих динамику роторной системы:
X = Л T J ' ( KP [ L ( F b - F a ) + M ab + M V ] + M 0 - G [ ( T ЛХ ) • ( T T ЛХ ) ] ) , c = 1 ( F b + F a + F V ) . m
Для окончательного построения модели роторной системы, как видно из (15), необходимо задать Fb , Fa , Mab , MV , FV . И если последние два параметра являются произвольными функциями, определяющими некоторое внешнее воздействие на систему, то первые три параметра определяются динамической связью, входящей в состав роторной системы. Очевидно, что они являются функциями состояния роторной системы Xi и ci. Задание этих функций определит окончательный вид математической модели роторной системы. В частности, Fb , Fa , M ab можно определить, основываясь на рассмотрении подшипниковых креплений ротора как трибосистем, по аналогии с тем, как это сделано в исследовании [3].
Приведем в качестве примера результат моделирования (рис. 3). При этом рассматривалось, что ротор закреплен в низкоскоростных подшипниках скольжения, а в качестве внешнего источника момента был использован двигатель постоянного тока. Качественный вид сечений ротора и статора в контактах a и b приведен на рис. 4 (в контакте a наблюдается импульсный дефект ротора и статора).
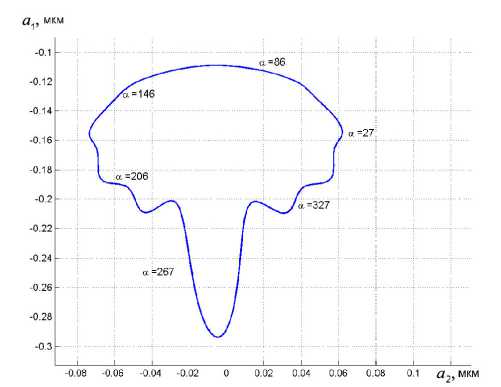
а )
Рис. 3. Результаты моделирования: а – движение ротора в плоскости а 1 а 2 в контакте a ; б – зависимость частоты вращения ротора от его угла поворота
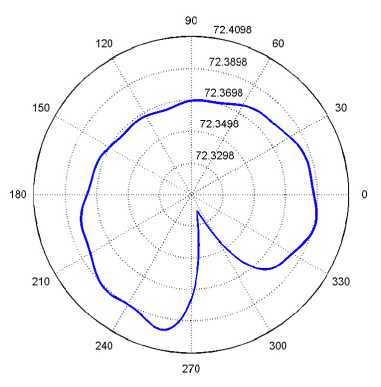
б )
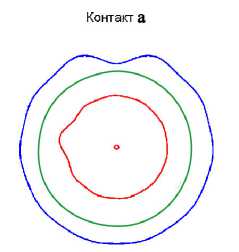
Рис. 4. Качественный вид ротора и статора в подшипниковых узлах
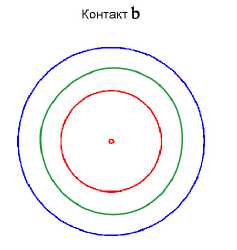
Из рис. 3 видно, что наличие импульсного дефекта оказывает существенное влияние не только на движение ротора в плоскости контакта a , но и на угловую частоту вращения ротора. Кроме того, виден периодический характер влияния дефекта в зависимости от угла поворота вала α .
Выводы. Предложенная формула Эйлера в параметрах Родрига–Гамильтона, позволяет осуществлять математическое моделирование пространственного движения твердых тел. При этом рассмотрение осуществляется в неподвижном базисе, что облегчает использование данной формулы. Кроме того, с точки зрения численного моделирования, ее несомненным преимуществом является отсутствие тригонометрических функций.
На основе формулы Эйлера в параметрах Родрига–Гамильтона построена модель роторной системы, позволяющая анализировать ее динамические свойства. Подобная модель может быть использована для решения различных задач, в частности задач технической диагностики.
Список литературы Динамика пространственного движения роторной системы в задачах динамической диагностики
- Яблонский А.А. Курс теоретической механики: учеб. для техн. вузов/А.А. Яблонский, В.М. Никифорова. -8-е изд., стер. -СПб.: Изд-во «Лань», 2001. -768 с.
- Челноков Ю.Н. Кватернионные и бикватернионные модели и методы механики твердого тела и их приложения. Геометрия и кинематика движения/Ю.Н. Челноков. -М.: Физматлит, 2006. -512 с.
- Чувейко М.В. Применение стробоскопического отображения Пуанкаре для диагностирования дефектов узлов сопряжения роторной системы/М.В. Чувейко//Вестн. Донск. гос. техн. ун-та. -2011. -Т.11, №1(52). -С. 37-42.
