Динамика волчка тип-топ при вязком трении

Автор: Карапетян А.В., Муницына М.А.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Механика
Статья в выпуске: 1 (49) т.13, 2021 года.
Бесплатный доступ
Простейшей моделью волчка тип-топ является неоднородный динамически симметричный шар, центр масс которого лежит на оси динамической симметрии, но не совпадает с геометрическим центром. В настоящей работе предполагается, что со стороны плоскости на шар действует сила трения скольжения, пропорциональная скорости точки контакта с плоскостью. При некотором классе начальных условий приводятся приближенные уравнения, описывающие его динамику.
Вязкое трение, неоднородный шар, устойчивость
Короткий адрес: https://sciup.org/142230098
IDR: 142230098 | УДК: 531.36
Tip-top dynamics in viscous friction
The simplest model of a tippe-top is an nonhomogeneous dynamically symmetric ball, the center of mass of which lies on the axis of dynamic symmetry, but does not coincide with the geometric center. In the present work, approximate equations that describe the dynamics of a tip-top under a certain class of initial conditions for a model of viscous friction are obtained. Qualitative analysis is supplemented by quantitative estimates.
Текст научной статьи Динамика волчка тип-топ при вязком трении
-
1. Постановка задачи
Рассмотрим задачу о движении неоднородного динамически симметричного шара. на. горизонтальной плоскости. Пусть г - радиус шара, s - расстояние между его геометрическим центром О и центром масс S (s = 0). Будем считать, что прямая SO с единичным ортом е = SO/s является осью динамической симметрии шара, а Л и С1 — его экваториальный и осевой моменты инерции.
Теоремы об изменении количества движения и кинетического момента шара, условие постоянства единичного вектора восходящей вертикали д и условие безотрывности движе ния, отнесенные к главным центральным осям инерции шара, имеют соответственно вид mi + [ш, т— = —тдд + Nд + F, Jw + [ш, Jw] = [г, Nд + F] + М, д + [ш, Д ]=0, (и, д ) = 0.
Здесь т - масса шара, и и ш — векторы скорости его центра масс и угловой скорости, г = se — гд и и = и + [ш, г] — радиус-вектор и скорость нижней точки шара соответственно, д — ускорение свободного падения, N > 0 — величина нормальной составляющей реакции опорной плоскости, J = diag(A, A, C) — центральный тензор инерции шара, F и М — сила и момент трения.
«Московский физико-технический институт (национальный исследовательский университет)», 2021
При заданной модели трения
Ғ = Ғ (н, ш , у -N ), М = М (н, ш , у -N ) (2) система (1) замкнута относительно переменных — ш, у и N . Локальный анализ рассматриваемой модели волчка представлен в работах [1, 2], а глобальный качественный анализ - в работах [3-5]. Численные исследования в рамках поликомпонентного сухого трения проводились в [6]. Сравнительный анализ различных моделей проведен в [7]. В работе [8] представлен метод обобщенных диаграмм Смейла [9, 10] в задаче о движении волчка тип-топ на вязкоупругой плоскости.
При М = 0 система (1) имеет первый интеграл, представляющий собой линейную комбинацию проекций кинетического момента на вертикаль и на ось динамической симметрии шара (интеграл Желле [11])
К(ш, у) = --|-Ыш, г) = к = const, О г а при М = 0 и Ғ = 0 - интеграл энергии
Н( н , ш , у ) = 2m-2 + 2(Jш■ ш) — тд( у , г) = h = const,
интеграл вида
Шз = const,
выражающий постоянство проекции кинетического момента шара и на ось динамической симметрии, а также интеграл вида
V(-■у) = ([у,-]■ [у,-]) = V2 = const,(6)
выражающий постоянство величины проекции скорости центра масс на опорную плоскость. В общем случае система (1) допускает энергетическое соотношение ■
Н = (Ғ, и) + (М, ш),(7)
и на ее решениях справедливы равенства
К = — — (М, г),(8)
О г vJ-^- у],[Ғ ■у]).<
т
Заметим, что в случае отрыва шара от плоскости (N = 0) для описания его динамики следует положить Ғ = 0, М = 0 в первых трех уравнениях (1), отбросив последнее урав нение. При этом для отслеживания возвращения на контакт следует рассматривать также уравнение z лоу )■ (10)
где z — высота над плоскостью нижней точки шара (в момент отрыва и при возвращении на контакт z = 0).
-
1.1. Абсолютно гладкая плоскость
Рассмотрим случай абсолютно гладкой плоскости Ғ = 0, М = 0. Наличие интегралов (З)-(б) и геометрического интеграла
г(у) = (у, у ) = 1 (И)
позволяет понизить порядок системы (1) до единицы.
При к = шз(±1 — s/г) получим
2(A + ms2 sin2 0)02 + W(0) = h — m^, (12)
где 0 - угол нутации (sin0 = 0 при к = шз(±1 — s/г)), a W(0) - эффективный потенциал вида
1„ 2 О2(кг — (г cos 0 — s)шз)2
W (0) = ^Ошз +------- ■ 2д -----~ + т9(г — scos0).
2 2 A sin2 0
Функция W (0) имеет на промежутке 0 G (0,л) одну критическую точку 0 = arccosж. являющуюся точкой строгого локального минимума и определяющуюся равенством
(к — (ж—Ь) шз)2 a (1—ж2)2 Ж
-
к — (ж—Ь) шз a (1—ж2) 3
— с = 0.
Здесь a, b и с - параметры шара а = A Е [1/2, +№], b = - € (0,1), с = ^^ € (0, х'.
С г С
Критической точке W(0) соответствуют решения уравнений движения шара на абсолютно гладкой плоскости вида v1 = v(cos wt cos Wot — sin wt cos 0 sin Wot) , v2 = v( — cos wt sin Wot — sin wt cos 0 cos Wot), «3 = v sin wt sin 0, W1 = w sin 0 sin wot, w2 = w sin 0 cos wot, w3 = const, 71 = sin 0 sin wot, 72 = sin 0 cos wot, 73 = cos 0, N = mg, где
k — (ж —b) w3
w = a (1 - ж2) , wo = w3 — уж.
Они определяют устойчивые регулярные прецессии вокруг центра масс, равномерно прямолинейно движущегося вдоль плоскости. При этом величина нормальной реакции опорной плоскости равна весу шара.
При k = шз(±1 — s/г) соответствующие решения имеют вид 71 = 72 = 0, 71 = ±1, wi = w2 = 0, w3 = const, v1 = v sinw3t, v2 = v cosw31, «3 = 0, N = mg,
которым соответствуют равномерные вращения шара вокруг вертикально расположенной оси симметрии, равномерно движущейся вдоль плоскости. Решения (16) всегда устойчивы при наинизшем расположениях центра масс шара (0 = 0), а при наивысшем расположении центра масс (0 = тг) устойчивы при выполнении неравенства w2 > 4Amgs/C 2 [12].
-
1.2. Плоскость с трением скольжения
Рассмотрим случай плоскости с вязким трением скольжения
F = —ки, М = 0. (17)
Тогда из рассмотренных в предыдущем параграфе стационарных движений реализуются только те, на которых проскальзывание отсутствует. Это равномерные вращения вокруг неподвижной вертикальной оси симметрии ((16) при v = 0) и регулярные прецессии вокруг
неподвижного центра масс ((14) при v = 0), параметры которых полностью определяются
постоянной интеграла Желле [4]: 0 = arccos у, k2
и справедливо равенство
= —b = k
, а(1—у2) + (у — b)2,
(а(1—у2) + (у — b)2)
b — (1 —а)у ,
2 _ (b — у)2 с
Ш 3 (а — 1)у + b.
Полный параметрический анализ устойчивости этих решений и соответствующие диа
граммы Смейла представлены в [3-4]. В частности, если параметры шара удовлетворяют равенствам
1 + b > а > ^—^ ( т + bV1 + 14b + b2) , (20)
то вращения с наинизшим расположением центра масс (у = 1) устойчивы при w2 < w+ (k2 < k+), а с наивысшим (у = —1) - при w2 > w- (k2 > k-), где w± = Ca T Д — b)’ k± =w±(±1 — b), а прецессии всегда устойчивы. Соответствующая диаграмма Смейла представлена на ПНР 1
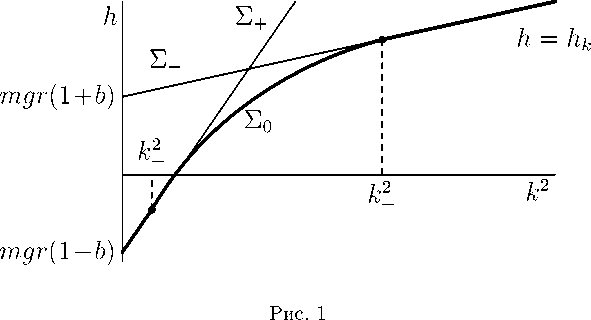
Множества У± и Уо соответствуют вращениям у = ±1 и прецессиям соответственно, жирным кривым соответствуют устойчивые движения. В случае (20) каждому значению к соответствует ровно одно устойчивое движение, точные выражения для соответствующей зависимости h = ЬДк) представлены в [3].
Все точки плоскости (к2, h), принадлежащие множеству У = У+ UУоUУ-, инвариантны относительного фазового потока системы (1), а все остальные (h > h-Д эволюционируют вдоль прямой к = const в сторону уменьшения h [13]. Это обстоятельство позволяет дать глобальный качественный анализ динамики шара [4]. Например, если в начальном положении ось шара почти вертикальна, центр масс близок к наинизшему положению, а начальная угловая почти сонаправлена с осью и достаточно велика (так, что к больше бифуркцион-ного значения к-, начальное положение точки на плоскости (k2,h) лежит в окрестности У+ правее прямой к2 = к-. Следовательно, при движении шара эта точка будет двигаться вдоль прямой к2 = const в сторону уменьшения h до тех пор, пока не достигнет множества У-. Таким образом, в процессе движения ось динамической симметрии шара перевернется к вертикальному положению с наивысшем расположением центра масс, и шар будет равномерно вращаться вокруг нее. Аналогичным образом определяется финальное движение шара при любых начальных условиях.
Для исследования описанных переходных процессов заметим, что при М = 0 на решениях системы (1) справедливо равенство т ш3 = ^([-^, 7], ез). (21)
Откуда в предположении о малости трения следует, что шз является медленной переменной, а приближенное уравнение, описывающие ее изменение, может быть получено подстановкой вместо быстрых переменных соответствующих периодических или почти периодических решений исходной системы, найденных в предположении о постоянстве медленной переменной [14,15], т.е. соответствующих стационарным движениям шара на абсолютно гладкой плоскости.
Например, если начальные условия лежат в окрестности неустойчивых вращений, то в качестве порождающих решений можно выбрать (14) с учетом (15), (13). Тогда из (21)
полагая г = 0 получим т2 , ш 3 = -к—Ф(шз),
Ф(шз) = (Ь-ж) к + (а(1 - ж2) + (Ь-ж)2) шз, где при шз = ка±, а± = (±1 — Ь) 1 зависимость ж = ж(шз) определяется равенствами (13), а. при шз = кст± следует положить ж = ±1 (шз = 0).
В силу соотношений (1) справедливо неравенство шз/к > ст-, откуда следует, что функция Ф(шз) не меняет знак. Кроме того, она оиращается в ноль только в точках шз = кст±. и решение (22) стремится к ксг± при начальных условиях шз(0) ^ кст+ (шз(0) ^ к<г+) в случае к > 0 (к < 0).
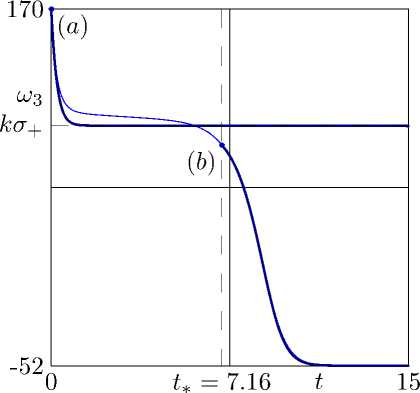
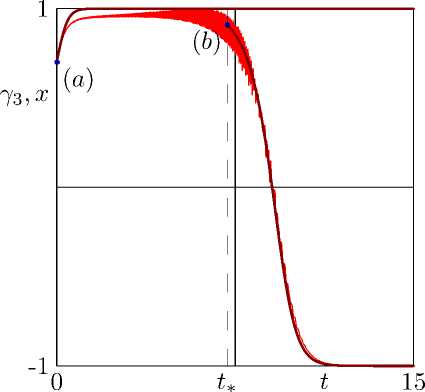
Рис. 2
На рис. 2 представлены результаты численного интегрирования уравнений движения шара с параметрами (соответствующих условиям (20))
а = 1, b = 1/3, с = 300 с-1 (23)
на плоскости с коэффициентом трения к = 0.1 к г/с при начальных условиях
г(0) = 0, 7з(0) = 0.7, 71(0) = 0, шз(0) = 170 рад/с, wi (0) = w2(0) = 0 (24)
(начальное значение 72(0) определяется геометрическим интегралом) - зависимость от времени проекции угловой скорости шара на ось динамической симметрии Ш3 и косинуса угла нутации 7з (тонкие кривые). Начальные условия (24) соответствуют начальному положению точки плоскости (к2, И) выше прямой Е . и правее бифуркационного значения к—. Как и следовало ожидать, в численном эксперименте наблюдается переход к неустойчивым вращениям с наинизшим расположением центра масс с последующим переходом к устойчивым вращениям с наивысшим его расположением.
Жирными кривыми на рис. 2 обозначены численные решения приближенного уравне ния (22) с начальными условиями шз(0) = 170 рад/с, (а)
шз(Д) = 85 рад/с, (b)
и соответствующего закона изменения косинуса угла нутации. Начальные условия (25а) соответствуют (24), а соответствующее решение (22) - переходу к неустойчивому вращению. Значение t* определялось из условия равенства (25b) при численном интегрировании уравнений движения шара с начальными условиями (24). Решение (22) с начальными условиями (25b) соответствует последующему переходу от неустойчивого вращения к устойчивому.
Рассмотрим теперь случай, когда начальные условия находятся не только в окрестности окрестности неустойчивых вращений (16) (при г = 0), а в окрестности любых решений (14) (с учетом (15), (13)), отличных от (18). В этом случае из равенства (9) можно заключить, что при малом трении г так же, как и Ш3 является малой величиной, что позволяет построить соответствующее приближенного уравнение.
Из (21), (9) получим г г = —к-- m
w 3 =
-
-ксг
к—Ф(^з) ', ma V1 — ж22
V1 — ж2 cos wt — к—Ф(шз),
где величина ш определяется первым равенством (15), т.е.
|
ш = < |
— 4ас(Ьх — 1)(— х + Ь) + к2 — к шз , . 2а (Ьх — 1) ’ к € (°- ’"+’’ _____________________________ (27) V 4пс(Ьх — 1)(—х + Ь) + к2 — к шз _ 2а (Ьх — 1) ’к + ’ |

Рис. 3
Из равенства (27) при движении в области шз/к < <г. следует, что абсолютная величина ш достаточно велика и ші является быстрой величиной. Осредняя уравнение (26) по времени, получим то же уравнение (21) и равенство Г = —кг/m. Таким образом, на основном переходе от множества У. к множеству У-, вели чина г экспоненциально стремится к нулю, не оказывая влияния на изменение ориентации шара. Если же начальная точка плоскости (к2’И лежит выше множества п+ и правее прямой к2 = к—, то величина ш достаточна мала, вследствие чего величина г оказывает влияние на изменение шз. Этим объясняется отклонение решения уравнений (22) от решения полной системы уравнений. На рис. 3 представлены решения системы (26) при начальных условиях г(0) = 0 м/с, (25а)
и системы (26) при начальных условиях v(t*) = -3.4 м/с, (25b), а также соответствующие решению полных уравнений движения шара величины.
В заключение заметим, что учет момента трения верчения [16] позволяет описать рассматриваемый переходной процесс без задержки на неустойчивом вращении.
Работа выполнена при поддержке Российского фонда фундаментальных исследований (19-01-00140, 18-01-00335) и Программы фундаментальных научных исследований по приоритетным направлениям, определяемым Президиумом Российской академии наук, № 7 «Новые разработки в перспективных направлениях энергетики, механики и робототехники».
Список литературы Динамика волчка тип-топ при вязком трении
- Контенсу П. Связь между трением скольжения и трением верчения в её учет в теории волчка // Проблемы гироскопии. Москва : Мир, 1967. С. 60-77.
- Magnus К. Kreisel. Theorie und Anwendungen. Berlin : Springer, 1971 = Магнус К. Гироскоп. Теория и применение. Москва : Мир, 1974. 526 с.
- Карапетян A.B. Качественное исследование волчка на плоскости с трением // ПММ. 1991. Т. 55, № 4. С. 698-701.
- Карапетян A.B. Глобальный качественный анализ динамики китайского волчка (тип-топ) // Известия Российской академии наук. Механика твердого тела. 2008. Т 43, № 3. С. 33-41.
- Карапетян A.B. Инвариантные множества механических систем с симметрией // Проблемы устойчивости и управления. Сборник научных статей, посвященный 80ле-тию академика Владимира Мефодьевича Матросова. Москва : Физматлит, 2013. С. 184210.
- Климов Д.М., Журавлёв В.Ф. О динамике волчка Томсона (тип-топ) на плоскости с реальным сухим трением // Механика твердого тела. 2005. Т. 40, № 6. С. 157.
- Зобова, A.A. Различные модели трения в динамике двусферического волчка // Известия РАН. Механика твердого тела. 2013. № 2. С. 21-28.
- Zobova A.A., Karapetyan A.V. Tippe-top on visco-elastic plane: steady-state motions, generalized Smale diagrams and overturns // Lobachevskii J. Math. 2017. V. 38. P. 10071013.
- Карапетян A.B. Качественный анализ динамики диссипативных систем с симметрией на основе метода обобщенных диаграмм Смейла // Современные проблемы математики и механики. Том 2. Механика. Выпуск 2. Москва : Изд-во МГУ, 2009. С. 192-200.
- Карапетян A.B. Обобщенные диаграммы Смейла и их применение к задачам динамики систем с трением // Аналитическая механика, устойчивость и управление: Тр. 10-й Междунар. Четаевской конф. Т. 1. Секц. 1. Аналитическая механика. Казань, 2012. Казань : Изд-во Казан, гос. техн. ун-та, 2012. С. 247-258.
- Jellet J.H. A treatise on the theory of friction. Dublin; London : Macmillan, 1872. 230 p.
- Карапетян A.B. Об устойчивости стационарных движений тяжелого твердого тела на абсолютно гладкой горизонтальной плоскости // ПММ. 1981. Т. 45, № 3. С. 504-511.
- Карапетян A.B. Устойчивость стационарных движений. Москва : Эдиториал УРСС, 1988. 165 с.
- Моргунов Б.И. Волосов В.М. Метод осреднения в теории нелинейных колебательных систем. Москва : МГУ, 1971. 508 с.
- Блехман И.И. Вибрационная механика. Москва : Физматлит, 1994. 400 с.
- Муницына, М.А. Переходные процессы в динамике волчка тип-топ // ПММ. 2020. Т. 84, вып. 4. С. 426-434.
