Динамика вращательного движения спутника с демпфером в центральном гравитационном поле

Автор: Холощак В.В.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Механика
Статья в выпуске: 4 (36) т.9, 2017 года.
Бесплатный доступ
Для исследования влияния внутренних диссипативных сил на вращатель- ное движение спутника в центральном гравитационном поле используется модель М. А. Лаврентьева (спутник моделируется твердой оболочкой и шарообразным демпфе- ром). Приводятся результаты численного анализа эволюции вращательного движения динамически симметричного и несимметричного спутника, движущегося по кеплеровой круговой орбите, в зависимости от значений коэффициента демпфирования и началь- ных условий.
Эволюция вращательного движения, спутник с демпфером, круговая орбита, стационарные вращения
Короткий адрес: https://sciup.org/142214990
IDR: 142214990 | УДК: 531.36
Текст научной статьи Динамика вращательного движения спутника с демпфером в центральном гравитационном поле
Для спутника, моделируемого одним твердым телом, единственным эволюционным эффектом при движении в центральном поле по круговой орбите является прецессия вектора кинетического момента, вокруг нормали к плоскости орбиты [1]. Внутренние диссипативные силы вызывают дополнительные эволюционные эффекты во вращательном движении спутника. В большинстве случаев при наличии таких сил предельными движениями спутника. являются только стационарные вращения - движения, при которых угловая скорость спутника относительно орбитального базиса остается неизменной и по величине, и по направлению.
Задача о влиянии внутренних диссипативных сил на вращательное движение спутника. рассматривалась ранее для твердого тела, с полостями, заполненными вязкой жидкостью [2-5]. Было показано, что в рамках данной модели для динамически симметричного спутника, на. круговой орбите, кроме положений равновесия, относительно орбитального базиса, единственными стационарными (предельными) движениями являются только цилиндрические регулярные прецессии. Устойчивость этих вращений исследовалась
«Московский физико-технический институт (государственный университет)», 2017
в [3] для случая сильно вязкой жидкости с использованием приближённых уравнений Ф. Л. Черноусько [4]. На основе этих уравнений также проведено аналитическое исследование эволюции вращений спутника для случая сильно вязкой жидкости и больших значений приведенной угловой скорости спутника [3].
В данной работе рассматриваются вопросы эволюции вращательного движения спутника с демпфером в рамках ограниченной задачи (движение центра масс и вращательное движение спутника считаются независимыми друг от друга, а центр масс движется по неизменной кеплеровой орбите). Спутник представлен системой двух тел: несущего тела (оболочки) So и однородного шарообразного несомого тела (демпфера) Si, центр которого неподвижен относительно оболочки (модель М.А. Лаврентьева, рис. 1). Ранее данная модель применялась для исследования движений тела при отсутствии внешнего момента сил [6], свойств движения спутника в центральном гравитационном поле в рамках неограниченной задачи [7], а также для исследования устойчивости стационарных вращений спутника в центральном гравитационном поле [8].
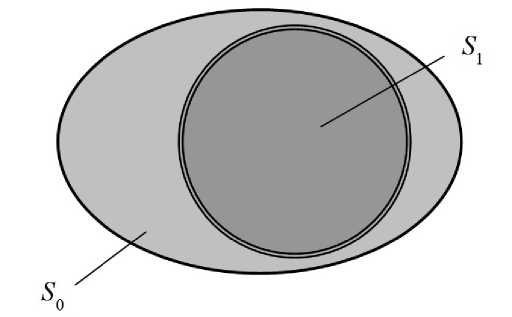
Рис. 1. Модель тела.
2. Постановка задачи
Пусть оси базиса, жёстко связанного с телом, направлены по главным осям инерции спутника, J - центральный тензор инерции всего спутника, I - момент инерции демпфера относительно центральной оси. Введём понятие «вспомогательного» тела (J* = J — I E), образованного оболочкой и точечной массой, равной массе демпфера и расположенной в центре масс демпфера. В описанной модели спутник является гиростатом (главные центральные моменты инерции А, В, С неизменны), а положения главных осей инерции и центров масс для спутника, и вспомогательного тела, будут совпадать независимо от положения демпфера, в несущем теле.
Для описания движения рассматриваемой системы воспользуемся уравнениями, полученными в [8]:
( J — I E ) U ' + U х JU = ці( V — U ) + 3 r х Jr ,
V ' + U х V = —^( V — U ), (2.1)
2Л' = Л о U, где E - единичная матрица, Л = {Ag, Ai, A2, A3} - кватернион единичной нормы, задающий положение базиса главных осей инерции ei, е2, ез спутника относительно базиса Кенига ii, І2, із, ш ~ вектор абсолютной угловой скорости оболочки, П - вектор абсолютной угловой скорости демпфера, wg = k/R3 - угловая скорость орбитального базиса, к - постоянная тяготения, R - радиус орбиты, ц - безразмерный коэффициент демпфирования, U = ш/шд ii V = П/wg. Штрихом обозначена, произволпая по безразмерному времени ^ = шдк
л3 =п
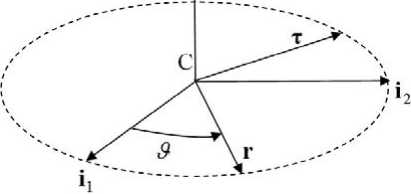
Рис. 2. Системы координат
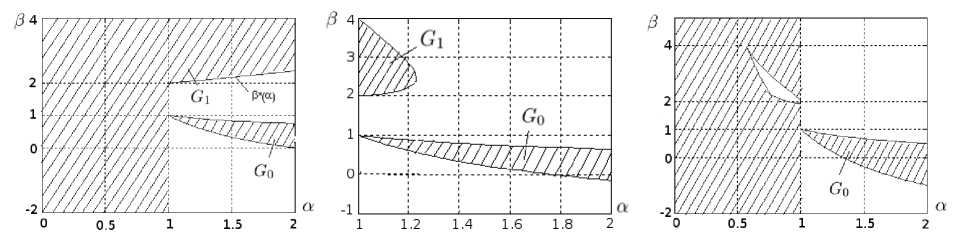
На основании уравнений (2.1) было проведено исследование устойчивости стационарных вращений динамически симметричного спутника [8], которое показало, что в рамках рассматриваемой модели при движении спутника по круговой орбите, стационарные вращения (цилиндрические регулярные прецессии, положения равновесия относительно орбитального базиса) являются единственными предельными движениями. Результаты исследования устойчивости стационарных вращений представлены в пространстве параметров а, 3, где а = (С — I )/(А — I ) - коэффициент «сжатости» вспомогательного тела вдоль оси симметрии, 3 - отношение абсолютной угловой скорости стационарного вращения к угловой скорости орбитального базиса.
Для значений безразмерного коэффициента демпфирования ц » 1 (рис. За) установлено, что для «вытянутого» вдоль оси симметрии спутника ( а < 1) все стационарные вращения неустойчивы. Однако для «сжатого» вдоль оси симметрии спутника ( а > 1) неустойчивы все «прямые» стационарные вращения с абсолютной угловой скоростью больше некоторого значения 3(а) зависящего от формы спутника.
В случае ц < 1 для «вытянутого» вдоль оси симметрии спутника (а < 1) б вето показано наличие малой области асимптотической устойчивости (аналогичной области устойчивости при ц ^ 1 рис. Зв), ограниченной узким диапазоном значений угловой скорости спутника. Для «сжатого» (рис. 36) вдоль оси симметрии спутника ( а > 1) показано наличие двух областей неустойчивости спутника, одна из которых аналогична области для спутника моделируемого твёрдым телом Go, вторая Gi появляется при достижении коэффициентом демпфирования значения, сравнимого с единицей, при этом область устойчивости для а < 1 исчезает.
Если ц ^ 1 (рис. Зв), то для «вытянутого» вдоль оси симметрии спутника (а < 1) существует малая область асимптотической устойчивости, тогда как для «сжатого» вдоль оси симметрии спутника область неустойчивости совпадает с областью неустойчивости Go для спутника, моделируемого абсолютно твёрдым телом.
Для исследования эволюционных процессов рассматриваемой модели представим систему (2.1) в виде десяти скалярных уравнений, где компоненты векторов U, V, r заданы в базисе главных осей инерции спутника ei, е2, ез. Компоненты вектора r х Jr в базисе ei, е2, ез выражаются в виде
3r х Jr = 3[(С — В)т2Гз, (А — С)гзгі, (В — А)щГ2], где компоненты единичного вектора r в базисе главных осей инерции спутника найдены при помощи операции перепроецирования единичного вектора rj = (cos(^), sin(^), 0)т в базисе Кёнига на связанный базис:
r = Л о r j о Л.
а) б) в)
Рис. 3. Области асимптотической устойчивости (не заштрихованы) и неустойчивости (заштрихованы) стационарных вращений при j ^ 1 (а j, — — 0, 5 (б), j ^ 1 (в)
Покомпонентно эта операция имеет форму:
т*1 — (А0 + А2 — А2 — А2) cos(P) + 2(АоАа + А1А2) sin(P),
^2 — (А0 + А2 - А1 - А3) Sin(P) + 2(А1А2 - А0А3) coS(P), ^3 — (А0А3 + А1А3) coS(P) + 2(А3А3 - А0А1) Sin(p).
Численное интегрирование дифференциальных уравнений (2-1) позволяет найти проекцию абсолютной угловой скорости спутника U (Р) на главные оси инерции спутника и кватернион Л(Р), задающий ориентацию спутника относительно базиса Кёнига. Для нахождения проекций абсолютной угловой скорости и оси ез на базис Кёнига используется операция перепроецирования:
U i — Л (Р) о и Е о .Л(Р), e i — Л (Р) о е з о Л (Р).
3. Вывод приближённых уравнений движения
Построим приближённые уравнения движения динамически симметричного спутника с демпфером по схеме, предложенной Ф.Л. Черноусько [4]. В рассматриваемой модели М. А. Лаврентьева приведённый кинетический момент переносного движения спутника:
L — A U + ^-^ ( L , е ) е ,
(3.1)
где U — ш /^о приведенная угловая скорость несущего тела, е - ось симметрии спутника, заданные своими компонентами в базисе Кёнига.
Приведённый кинетический момент демпфера относительно его центра:
L E — J B V ; V — Vcв + U ,
(3.2)
где JE — I E, VCB - приведённая угловая скорость демпфера в системе координат, связанной с телом (относительная угловая скорость), V - приведённая угловая скорость демпфера в базисе Кёнига.
Приведённый гравитационный момент, действующий на спутник [8]:
M g — 3(A — С)( е , r i)( е х r i),
(3.3)
где ri - единичный вектор, сонаправленный с радиус-вектором центра масс спутника, заданный своими компонентами в базисе Кёнига.
Предположим, что внешние силы, действующие на демпфер, не создают момента относительно его центра [4]. Приведённый диссипативный момент примем равным (—jVcв).
Исходя из (3.1) - (3.3) и теоремы об изменении кинетического момента для спутника и демпфера, получим динамические уравнения движения рассматриваемой системы:
dL dVCB dd + 1 dd dU dVCB d— + dd
: 3(A - C )( e , r j )( e x r j ),
-^(V - U),
(3.4)
где d = w0t - безразмерное время.
Предполагая, что при безразмерном коэффициенте демпфирования ц ^ 1, ^уф- и VCB - величины одного порядка, преобразуем уравнение движения демпфера из (3.4) к виду
dU dd
—MV с в.
(3.5)
На основании (3.5) уравнения движения рассматриваемой системы (3.4), с учётом уравнения движения оси симметрии могут быть представлены в виде
|
d L _ |
M d + 3(A — C )( e , r j)( e x r j), |
|
dd = |
|
|
d e |
L |
|
dd = |
A x e , |
|
I d? U |
|
|
M d = |
2 . |
(3.6)
Здесь влияние демпфера описывается дополнительным моментом М у, где расчёт (ущ производится из условия отсутствия демпфирования (^L = 3(A — C )( e , r j)( e x r j)):
U = A +
(A — C ) CA
( L , e ) e ,
d2 U r j(( L x e )) ( L x e ) x r
= 3(1 - ay) ( n x r j ) e + a (e x ri) + ( r i , e) A 1 + e x ( n x r i) +
+(1 Ca1)(L, e) ^3(1 - «x)(rj, e)[(ex rj)x e]+L x Ax e)} , где cosd 0
C
sin d , n = 0 .
4. Результаты численного моделирования
Численное интегрирование уравнений (2.1) показало, что характер поведения как динамически симметричного, так и динамически несимметричного спутника на круговой орбите существенно зависит от значений коэффициента демпфирования ц.
4.1. Результаты численного моделирования для динамически симметричного спутника
Введём параметры а и у, описывающие эллиптичность вспомогательного тела (a = (C — I )/(A — I ), у = I/(A — I )), где a - коэффициент «сжатости» вспомогательного тела вдоль оси симметрии, у - отношение момента инерции демпфера к экваториальному моменту инерции вспомогательного тела. Исследование эволюционного процесса динамически симметричного спутника (A = В) произведено на основании численного интегрирования уравнений (2.1), которые с учётом введённых обозначений могут быть представлены в виде
«1 = -П2Пз(а - 1) + цч("1 - иД + 3т2Тз(а - 1), и2 = П1Пз(а - 1) + ц7("2 - «2) - 3гіГз(а - 1),
-
"3 = 7Ц("3 - ^3), а
-
"1 = -(И2«3 - ^"2) - ц("1 - «1), "2 = -(«3"1 - «1"3) - ц("2 - "2),
-
"3 = -(П1"2 - П2"1) - ц("3 - П3),
-
А0 = - 2(АШ1 + A2U2 + А3П3),
-
А1 = 2( АоП1 + А2П3 - А3П2),
-
А2 = 2 (А 0 п 2 + А3^1 - А. "3))
-
А3 = 2(^3 + А1^2 - А2«1),
где U = (п1, п2, П3)т, Л = { Ао,А1,А2 , А3}, штрихом обозначена производная по безразмерному времени Р.
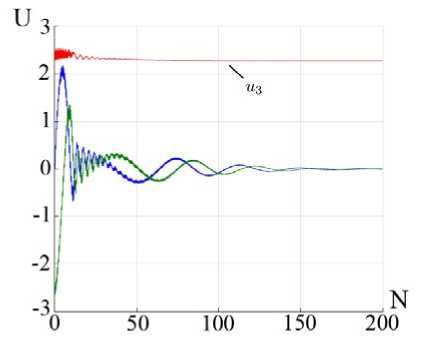
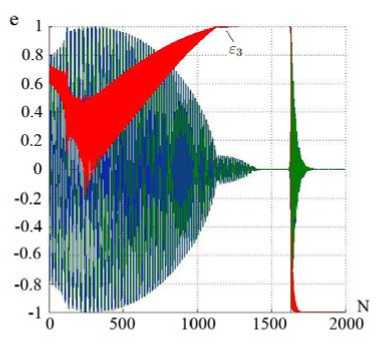
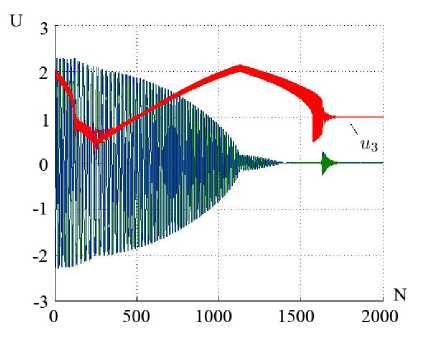
На рис. 4 и б представлены картины эволюции динамически симметричного спутника, «сжатого» вдолв оси симметрии, закрученного в начальный момент времени с угловой скоростью U (0) = 4, в начальный момент ось симметрии отклонена от нормали к плоскости орбиты на угол 45°.
а) б)
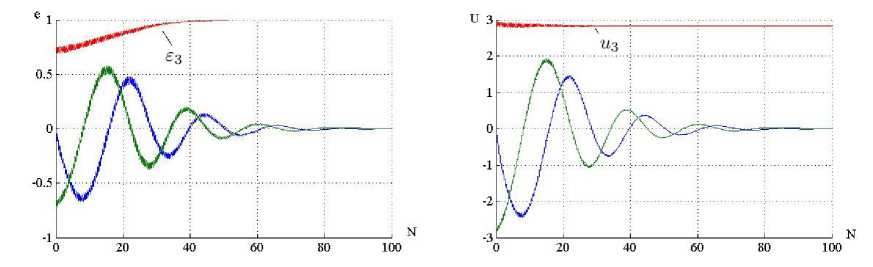
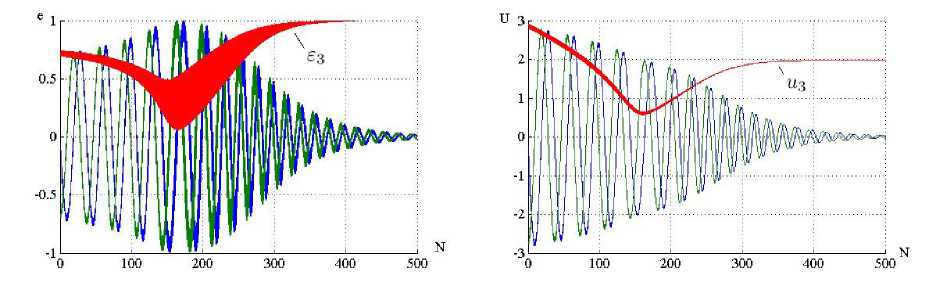
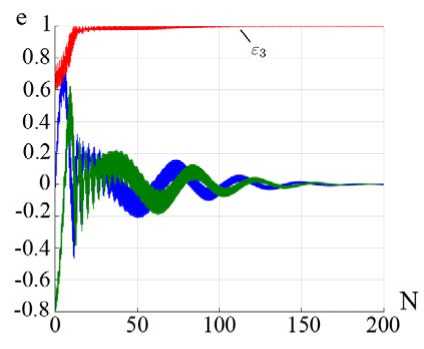
Рис. 4. Проекции единичного вектора, оси симметрии (а) и вектора, абсолютной угловой скорости U (б) на базис Кёнига в зависимости от числа оборотов по орбите для динамически симметричного спутника, «сжатого» вдоль оси симметрии ( а = 1,25, 7 = 1, 25), при ц = 0,1 (ез и«з- проекции векторов е з и U на нормаль к плоскости орбиты соответственно)
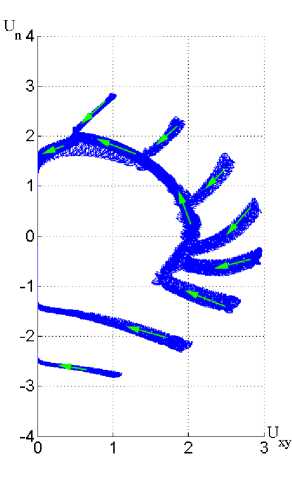
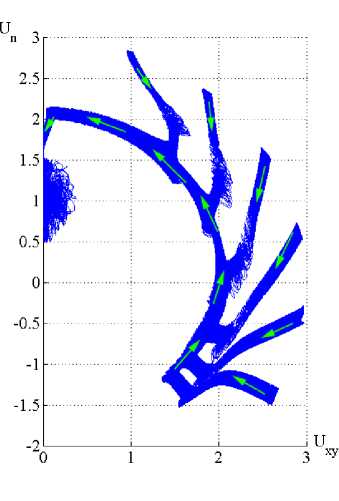
При малом коэффициенте демпфирования (порядка ц = 0,1) ось симметрии спутника изначально эволюционирует в направлении к нормали к плоскости орбиты (рис. 4), при этом проекция угловой скорости на нормаль практически не меняется, а проекция угловой скорости на. плоскость орбиты монотонно стремится к нулю. На рис. 5 представлена, картина, эволюции описанной модели для различных начальных углов отклонения оси симметрии от нормали к плоскости орбиты. Видно, что финалом эволюции являются стационарные вращения вокруг оси наибольшего момента, инерции, сонаправленной с нормалью к плоскости орбиты (цилиндрические регулярные прецессии). Однако угловые скорости полученных стационарных вращений зависят от начальных углов отклонения оси симметрии от нормали к плоскости орбиты. Для большинства начальных условий финальный этап эволюции (дуга окружности на рисунке) представляет собой вращение с постоянной по модулю угловой скоростью ш ~ 1,8ш0. Представленная картина эволюции подтверждает наличие асимптотической устойчивости стационарных вращений вокруг нормали к плоскости орбиты при ц ^ 1, показанной в [8].
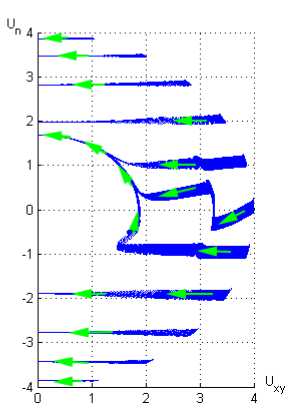
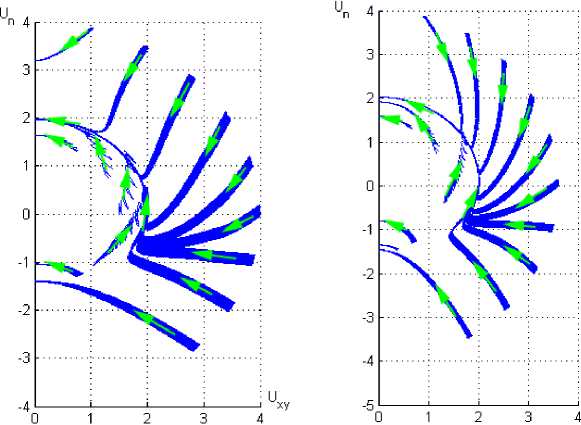
Рис. 5. Проекции абсолютной угловой скорости U на плоскость Uxy и на нормаль Un к плоскости орбиты ( a = 1, 25, 7 = 1,25) при ц = 0,1 для различных начальных углов отклонения оси симметрии от нормали к плоскости орбиты
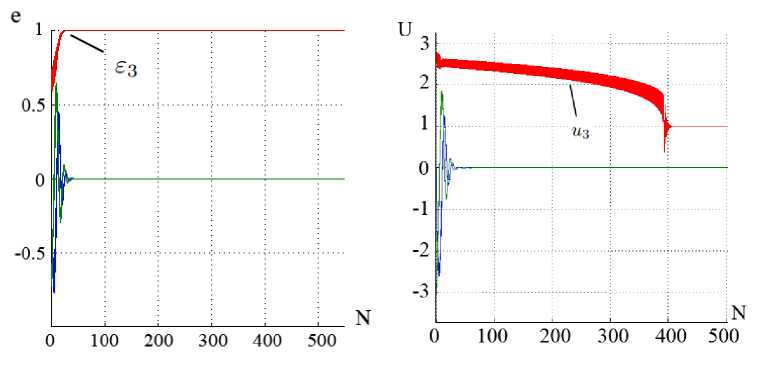
Иная картина эволюции наблюдается для коэффициентов демпфирования, сравнимых с единицей. При ц = 0,9 (рис. 6) на первом этапе ось симметрии отклоняется от нормали к плоскости орбиты, а проекция угловой скорости на нормаль монотонно уменьшается. Когда величина угловой скорости спутника достигает значения ш ~ 2шо, ось симметрии начинает движение в сторону нормали, при этом величина угловой скорости спутника практически не меняется. Проекция абсолютной угловой скорости на плоскость орбиты монотонно убывает в течение всего процесса эволюции (рис. 7). В результате устанавливается стационарное вращение вокруг нормали к плоскости орбиты с угловой скоростью ш ~ 2шо.
а)
б)
Рис. 6. Проекции единичного вектора, оси симметрии (а) и вектора, абсолютной угловой скорости U (б) на базис Кёнига в зависимости от числа оборотов по орбите для динамически симметричного спутника, «сжатого» вдоль оси симметрии ( a = 1,25, 7 = 1, 25), при ц = 0,9 (ез и U3 - проекции векторов е з и U на нормаль к плоскости орбиты соответственно)
Финальная стадия эволюции (рис. 8) демонстрирует пространственные резонансные вращения (ш = 2шо) для большинства начальных углов отклонения оси симметрии от нормали к плоскости орбиты. Данный результат сохраняется при различных начальных значениях угловой скорости U(0) > 1, 5. Кроме того, на основании предположений, сделанных при выводе приближённых уравнений движения (3.6), следует, что они должны достаточно точно описывать движение рассматриваемой системы при ц ^ 1. Однако очевидно качественное совпадение результатов, полученных на. основании точной (рис. 8а) и при- ближённой (рис. 86) моделей, при коэффициенте демпфирования, сравнимом с единицей. Полученные результаты подтверждают наличие асимптотически устойчивых цилиндрических регулярных прецессий для коэффициентов демпфирования, сравнимых с единицей [8].
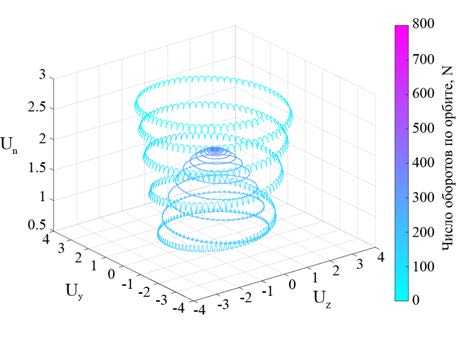
а)
Рис. 7. Изменение вектора угловой скорости U (а) и его проекции на плоскость орбиты (б) при д = 1 (а = 1,25, у = 1,25)
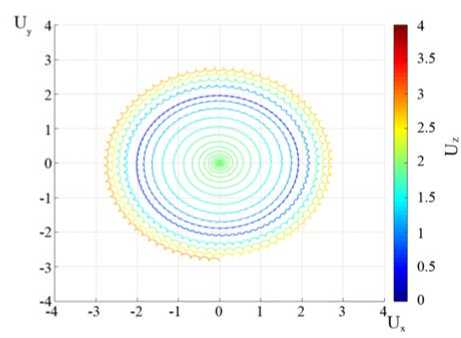
б)
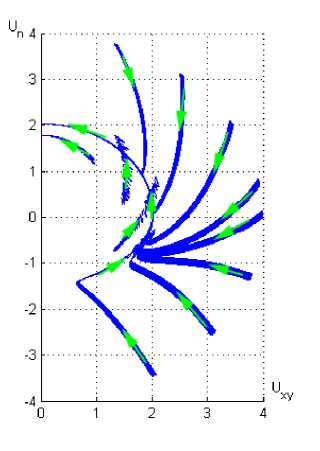
а) б)
Рис. 8. Проекции абсолютной угловой скорости U на плоскость Uxy и на нормаль Un к плоскости орбиты (а = 1, 25, у = 1,25) при д = 0,9 для различных начальных углов отклонения оси симметрии от нормали к плоскости орбиты па. основании точной (а) и приближённой (б) моделей
Исследование эволюционных эффектов для коэффициента д ^ 1 показало, что увеличение коэффициента, демпфирования существенно не влияет на. картину эволюции оси симметрии и вектора абсолютной угловой скорости в сравнении с соответствующей картиной при д, сравнимых с единицей, однако замедляет скорость эволюции. Как и ранее (при д, сравнимых с единицей), на финальной стадии эволюции наблюдаются (рис. 9а) пространственные спин-резонансные вращения с угловой скоростью ш = 2шо, но диапазон начальных значений углов отклонения оси симметрии от нормали к плоскости орбиты, приводящий к резонансным вращениям с угловой скоростью ш = 2шо, увеличивается. Сравнительный анализ картины эволюции вектора, абсолютно угловой скорости (рис. 9) показывает предсказанное совпадение результатов для точной и приближённой моделей.
а)
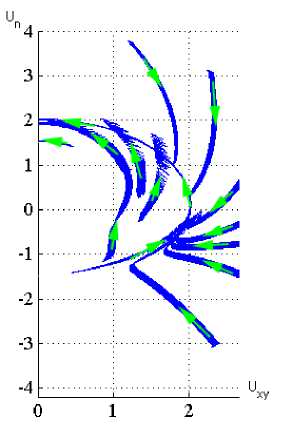
Рис. 9. Проекции абсолютной угловой скорости U на плоскость Uxy и на нормаль Un к плоскости орбиты ( a = 1, 25, 7 = 1,25) при ц = 10 для различных начальных углов отклонения оси симметрии от нормали к плоскости орбиты па. основании точной (а) и приближённой (б) моделей
б)
В случае «вытянутого» вдоль оси симметрии спутника, согласно [8], существует лишь малая область устойчивости стационарных вращений в пространстве параметров a,7,U для ц ^ 1. На рис. 10 приведена картина эволюции спутника, параметры которого принадлежат указанной области ( a = 0, 83, 7 = 0, 83; U (0) = 3,5), начальный угол отклонения оси симметрии от нормали к плоскости орбиты составляет 45°. Представленный результат подтверждает наличие устойчивых стационарных вращений вокруг нормали к плоскости орбиты при ш = 2,3шо. Данная картина эволюции наблюдается для достаточно узкого диапазона, начальных значений углов отклонения оси симметрии от нормали. При значительном увеличении или уменьшении начального угла, отклонения оси симметрии от нормали к плоскости орбиты в процессе эволюции наблюдается смена, оси вращения спутника, (рис. 11).
а)
Рис. 10. Проекции единичного вектора, оси симметрии (а) и вектора, абсолютной угловой скорости U (б) на базис Кёнига в зависимости от числа оборотов по орбите для динамически симметричного спутника, «вытянутого» вдоль оси симметрии ( a = 0, 83, 7 = 0, 83), при ц = 0,05 (ез и U3 - проекции векторов е з и U на нормаль к плоскости орбиты соответственно)
б)
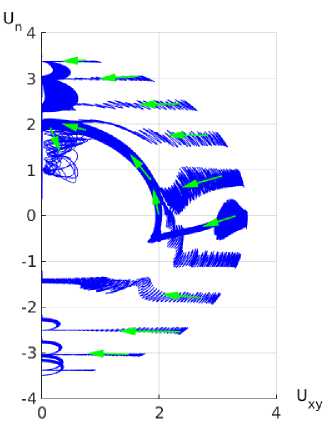
Рис. 11. Проекции абсолютной угловой скорости U на плоскость UTy и на нормаль Un к плоскости орбиты (а = 0, 83, у = 0, 83) при д = 0,05 для различных начальных углов отклонения оси симметрии от нормали к плоскости орбиты
4.2. Результаты численного моделирования для динамически несимметричного спутника
В рамках рассматриваемой модели для несимметричного спутника предельными движениями являются только положения равновесия относительно орбитального базиса, причем асимптотически устойчивыми являются только те, ось наибольшего момента инерции которых параллельна нормали к плоскости орбиты, а ось наименьшего момента инерции параллельна радиус-вектору орбиты. В ходе исследования эволюционных процессов рассматриваются начальные условия, при которых спутник закручен вокруг оси наибольшего момента инерции ( А < В < С), вращения вокруг другий осей не рассматриваются в связи с тем, что в ходе эволюции наблюдается быстрый переход к вращениям вокруг оси наибольшеего момента инерции. Исследование произведено на основании численного интегрирования уравнений (2.1), имеющих покомпонентное представление:
« 1 = а —І {- и 2 « 3 (С - В ) + ^І(г 1 - « 1 ) + 3г 2 г з (С - В )} ,
« 2 = — - {—U 1 U 3 (A - С ) + ^1 (V 2 - уД + 3Г 1 Г 3 (А - С )} ,
В - 1
« 3 = С - 1 {-« 1 « 2 (В - А) + ЦІ (г з - из) + 3Т 1 Т 2 (В - А)} ,
« 1 = -(« 2 ^ 3 - U 3 V 2 ) - д(щ - U1), « 2 = -(« 3 Г 1 - иі«з) - д(г 2 - U2), «3 = -(U 1 « 2 - « 2 « 1 ) - д(г 3 - « з ),
А 0 = - 2 (А 1 « 1 + X2U2 + А з п з ),
А 1 =
А 2 =
A 3 =
2(А 0 « 1 + А 2 « 3
2( Ао«2 + A3U1
2(А 0 « 3 + А 1 « 2
А 3 и 2 ),
А 1 « 3 ),
- А 2 « 1 ),
где U = (и1,и2,из)т, Л = {Ao, А1, А2, Аз}, А,В,С- главные центральные моменты инерции спутника, штрихом обозначена производная по безразмерному времени Р.
б)
а)
Рис. 12. Проекции единичного вектора оси ез (а), вектора абсолютіюй угловой скорости U (б) па. базис Кёнига, в зависимости от числа, оборотов по орбите для динамически несимметричного спутника с параметрами А = 0,8; В = 0,9; С = 1, I = 0,4С при д = 0,1 (ез и из - проекции векторов ез и U на нормаль к плоскости орбиты соответственно)
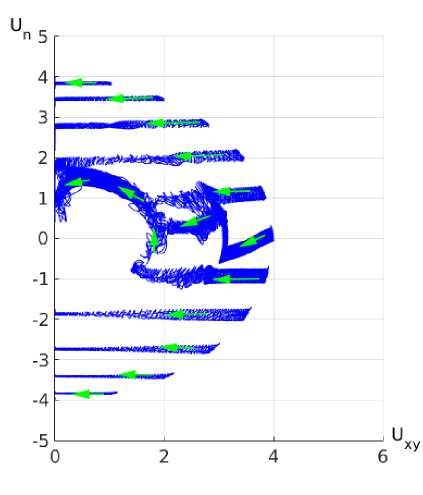
Рис. 13. Проекции абсолютной угловой скорости U на плоскость ижу и на нормаль Un к плоскости орбиты ( А = 0,8; В = 0,9; С = 1, I = 0,4С) при д = 0,1 для различных начальных углов отклонения оси е з от нормали к плоскости орбиты
На рис. 12 представлена, картина, эволюции динамически несимметричного спутника, закрученного в начальный момент времени вокруг оси ез с угловой скоростью U(0) = 4, ось ез отклонена от нормали к плоскости орбиты на угол 50°. При малом коэффициенте демпфирования д = 0,1 очевиден быстрый переход к стационарным вращениям (положениям равновесия относительно орбитального базиса). Картина, эволюции угловой скорости для различных начальных углов отклонения оси ез от нормали к плоскости орбиты, представленная на рис. 13, показывает, что на первом этапе эволюции движения стремятся к плоским вращениям вокруг нормали к плоскости орбиты. В дальнейшем плоские нестаци- онарные вращения эволюционируют к устойчивому положению равновесия относительно орбитального базиса. Данные результаты подтверждают наличие асимптотически устойчивых стационарных вращений вокруг нормали к плоскости орбиты на финальной стадии эволюции при ц < 1 [8]. Однако отклонения кривых эволюции плоских вращений от вертикальных прямых в диапазоне Un Е (1, 2) (рис. 13) и перевороты спутника свидетельствуют о том, что при малых значениях параметра ц, при достижении некоторых значений угловой скорости плоские вращения несимметричного спутника становятся неустойчивыми.
а)
Рис. 14. Проекции единичного вектора оси ез (а) и вектора абсолют ной угловой скорости U (б) на. базис Кёнига, в зависимости от числа, оборотов по орбите для динамически несимметричного спутника с параметрами А = 0,8; В = 0,9; С = 1; I = 0,3С при ц = 20 (ез и из - проекции векторов ез и U на нормаль к плоскости орбиты соответственно)
б)
а)
б)
Рис. 15. Проекции абсолютной угловой скорости U на плоскость UTy и на нормаль Un к плоскости орбиты ( А = 0,8; В = 0,9; С = 1, I = 0,4С) для различных иачальиых углов отклонения оси е з от нормали к плоскости орбиты, ц = 1 (а), ц = 50 (б)
С ростом коэффициента, демпфирования картина, эволюции меняется. На рис. 14 представлен эволюционный процесс с параметрами: ц = 20, в начальный момент времени угло- вая скорость спутника равна трём угловым скоростям орбитального базиса (U(0) = 3), ось ез отклонена от нормали к плоскости орбиты на угол 50°. На начальном этапе эволюции ось ез отклоняется от нормали к плоскости орбиты, абсолютное значение угловой скорости уменьшается под действием диссипативных сил, вектор угловой скорости тела отклоняется по направлению к плоскости орбиты. В тот момент, когда абсолютное значение угловой скорости спутника достигает значения ш та 2шд, ось ез начинает движение по направлению к нормали к плоскости орбиты, при этом абсолютное значение угловой скорости не меняется, а её проекция на нормаль к плоскости орбиты монотонно увеличивается. Когда ось наибольшего момента инерции ез становится сонаправлена с нормалью к плоскостью орбиты, под действием диссипативных сил начинает убывать абсолютное значение угловой скорости спутника, что приводит к перевороту тела (ось наибольшего момента инерции ез противонаправленна нормали к плоскости орбиты) и установлению спин-резонансных вращений с угловой скоростью ш = шд. Подобная картина эволюционного процесса наблюдается при 0,5 < ц < 20, однако при этом на финальной стадии эволюции не наблюдается переворота тела. В ходе эволюции для динамически несимметричного (как и для динамически симметричного спутника) наблюдается наличие резонансных режимов вращения ш та 2шд (рис. 13, рис. 15).
5. Заключение
Для спутника с демпфером, движущегося по круговой орбите, проведено численное исследование эволюции вращательного движения в центральном гравитационном поле. Установлено, что для динамически симметричного спутника, «сжатого» вдоль оси симметрии, финалом эволюции являются стационарные вращения вокруг оси симметрии, со-направленной с нормалью к плоскости орбиты (цилиндрические регулярные прецессии), но картина эволюционного процесса существенно зависит от значения безразмерного коэффициента демпфирования ц. При ц ^ 1 для подавляющего большинства начальных условий ось динамической симметрии и вектор угловой скорости монотонно эволюционируют к нормали к плоскости орбиты. По мере увеличения значения ц увеличивается область начальных условий, для которых угол между нормалью к плоскости орбиты и осью вращения спутника сначала увеличивается, а затем, когда величина угловой скорости спутника достигает значения удвоенной угловой скорости орбитального базиса, реализуется финальный этап - резонансный режим 2:1, при котором величина угловой скорости спутника остается неизменной: ш = 2шд, угол между осью вращения спутника и нормалью к плоскости орбиты монотонно уменьшается и в финале эволюции реализуются стационарные вращения вокруг нормали к плоскости орбиты: ш = 2шд.
Результаты численного анализа подтвердили также наличие асимптотически устойчивых стационарных вращений для «вытянутого» вдоль оси симметрии спутника в узком диапазоне значений параметров а, /3 при ц ^ 1 .
Установлено также качественное совпадение результатов, полученных на основе точных уравнений и приближенных уравнений Ф.Л. Черноусько при ц ^ 1. Результаты исследования эволюции вращательного движения несимметричного спутника с демпфером показали, что при ц ^ 1 для большинства начальных условий на первом этапе эволюции ось наибольшего момента инерции и вектор угловой скорости спутника монотонно эволюционируют к нормали к плоскости орбиты. Второй этап эволюции представляет собой плоские монотонно затухающие вращения вокруг нормали к плоскости орбиты, сонаправленные с осью наибольшего момента инерции, и заканчивается положениями равновесия относительно орбитального базиса. По мере увеличения значения ц увеличивается область начальных условий, для которых угол между нормалью к плоскости орбиты и осью вращения спутника, как и для симметричного спутника, сначала увеличивается, затем возникают временные резонансные режимы 2:1, но в итоге финалом эволюционного процесса являются положения равновесия относительно орбитального базиса.
Список литературы Динамика вращательного движения спутника с демпфером в центральном гравитационном поле
- Белецкий В.В. Движение спутника относительно центра масс в гравитационном поле. М.: МГУ, 1975.
- Моисеев Н.Н., Румянцев В.В. Динамика тела с полостями, содержащими жидкость. М.: Наука, 1965.
- Сидоренко В.В. Эволюция вращательного движения планеты с жидким ядром//Астрономический вестник. 1993. Т. 27, № 2. С. 119-127.
- Черноусько Ф.Л., Акуленко Л.Д., Лещенко Д.Д. Эволюция движений твердого тела относительно центра масс. М.-Ижевск: Ижевский институт компьютерных исследований, 2015.
- Черноусько Ф.Л. Движение твердого тела с полостями, заполненными вязкой жидкостью, при малых числах Рейнольдса//Журнал вычислительной математики и математической физики. 1965. Т. 5, № 6. С. 1049-1070.
- Черноусько Ф. Л. О движении твердого тела, содержащего сферический демпфер//Журнал прикладной механики и технической физики. 1965. № 1. С. 73-79.
- Амелькин Н.И. Об асимптотических свойствах движений спутников в центральном поле, обусловленных внутренней диссипацией//ПММ. 2011. Т. 75, № 2. С. 204-223.
- Амелькин Н.И., Холощак В.В. Об устойчивости стационарных вращений спутника с внутренним демпфированием в центральном гравитационном поле//ПММ. 2017 Т. 81, № 2. С. 123-136.
