Динамика жесткого ротора свободной турбины двигателя НК-14СТ-10 с применением демпферов опор

Автор: Чаадаев К.Н., Новиков Д.К.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 4-1 т.12, 2010 года.
Бесплатный доступ
Рассмотрена задача увеличения ресурса свободной турбины за счет внедрения гидродинамических демпферов в штатную конструкцию опоры. Составлены дифференциальные уравнения движения ротора с учетом его конструктивных особенностей. Приведены результаты расчета вынужденных колебаний системы и дан анализ целесообразности модернизации опор свободной турбины.
Аппарат газоперекачивающий, турбина свободная, ресурс, демпфер гидродинамический, динамика ротора, оптимизация
Короткий адрес: https://sciup.org/148199375
IDR: 148199375 | УДК: 621.438
The power turbine NK-14ST-10 rotor vibration using squeeze film damper
The problem of increasing the resource power turbine through the introduction of squeeze film dampers in a fulltime design support is considered. The differential equations of the rotor motion with its design features are drawn. The results of the calculation of forced oscillations of the system and analyzes the feasibility of upgrading supports power turbine.
Текст научной статьи Динамика жесткого ротора свободной турбины двигателя НК-14СТ-10 с применением демпферов опор
вильном выборе параметров улучшают вибрационное состояние агрегата с минимальными затратами на модернизацию его опор.
ГДД имеют малую массу и габариты, просты в изготовлении, надежны и эффективны при работе, имеют несколько конструктивных исполнений с разницей демпфирующей способности в сотни раз – все это позволяет гибко применять их для конкретных условий эксплуатации. ГДД позволяют успешно проходить области повышенной вибрации при вынужденных колебаниях системы [3]. Ранее исследовались колебания жесткого ротора в опорах с ГДД, однако ротор рассматривался фактически как материальная точка (Гантер, Моухэн, Хан и т.д.) [4]. Исследование динамики жесткого ротора СТ на подшипниках качения с ГДД с учетом реальной геометрии позволяет выбрать оптимальную конструкцию демпфера, спрогнозировать поведение системы “ро-тор-подшипники” при эксплуатации и является важной задачей увеличения ресурса ГПА.
Для рассмотрения была принята СТ двигателя НК-14СТ-10 (рис. 1), в опоры которой возможно установить ГДД с минимальными доработками корпуса подшипников.
В общем случае вынужденные колебания зависят от статической (смещение центра тяжести от оси вращения) и динамической (несовпадение главной центральной оси инерции с осью вращения) неуравновешенностей. Рассмотрим малые колебания ротора (рис. 1) около положения равновесия. Неподвижную систему координат OXYZ выбираем так, чтобы ее начало совпало с центром левой корпусной втулки демпфера. Вводим допущения: угловая скорость ротора постоянна и ротор не имеет осевых перемещений.
Дадим ротору произвольное смещение. Координаты центра масс правого вибратора обозначим x1 и y1 , координаты центра масс левого виб-
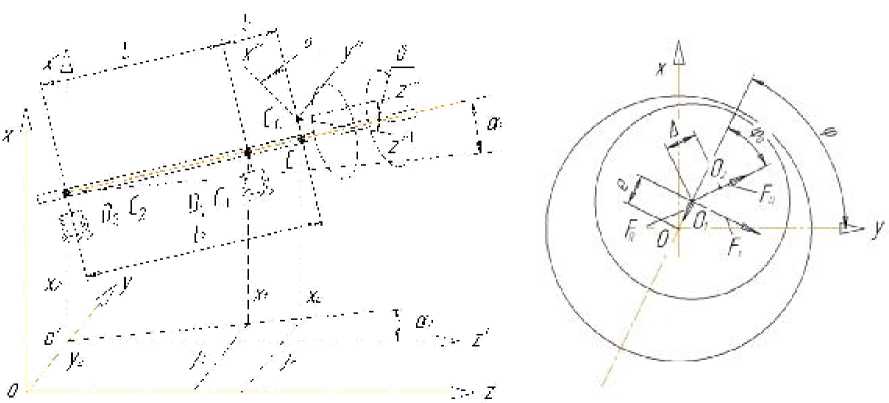
Рис. 1. Расчетная схема ротора СТ
ратора – x2 и y2 , координаты центра масс ротора - хс и ус . Вал рассматривается как абсолютно жесткое тело [5]. Угол между проекцией оси ротора на плоскость yz и осью OZ назовем а 2 ; угол между осью ротора и ее проекцией на плоскость xz обозначим а 1 . Положение опор определяется расстояниями L между ними и l 1 , l 2 – от соответствующей опоры до центра масс.
Если обозначить через х и у координаты точки геометрической оси ротора, лежащей на пересечении этой оси с плоскостью, перпендикулярной к оси вращения и проходящей через центр масс ротора, то координаты центра масс будут:
xC = x + А • cos to t yC = y + А • sin to t , где А - смещение центра масс относительно геометрического центра.
Выразим координаты центра масс и углы через независимые координаты x1, y1, x2, y2 :
LL
У с = у 1 • ^2 + у 2 • — + e cos to t ;
m • xC = - С 1 х 1 - С 2 х 2 - F R 1 cos ф -
F R 2 cos ф + F T 1 sin ф + F T 2 sin ф ;
m • У с = - С 1 У 1 - С 2 У 2 - F R 1 sin Ф -
FR2 sin ф - FT1 cos ф - FT2 cos ф, где FR 1, FR2, Ft1 , FT2 - радиальные и тангенциальные составляющие усилия в демпферах подшипников 1-й и 2-й опор; С1 , С2 – жесткости упругих элементов демпферов 1-й и 2-й опор; m – масса ротора СТ. Усилия в ГДД являются сложными нелинейными функциями от перемещения и определялись с учетом конвективных сил инерции смазочного слоя по методике, изложенной в работе [4].
Подставив найденные значения xC и yC в дифференциальные уравнения, получим:
m ( l 1 x2 + 1 2 Х 1 ) + С 1 х 1 L + С 2 х 2 L + F R 1 L cos ф +
+ F R 2 L cos ф - F T 1L sin ф - F T 2 L sin ф =
= m А L to 2 cos to t ; (2)
xr = x • L2 + x, • L^ + e sin tot;
C 1 L 2 L
a i
= y 2-- y l + g cos( to t - 0 );
m ( l 1 y 2 + 1 2. y ! ) + С 1 У 1 L + С 2 У 2 L + FR 1 L sin ф + + F R 2 L sin ф + F t 1 L cos ф + F T 2 L cos ф =
= m А L to 2 sin to t .
а1
x2 l x1 + 5 sin(tot - 0)
где 5 - малый угол наклона оси C 0 Z к оси вращения, а 0 - угол между осью C 0 X и направлением CC 0 .
На основании теоремы о движении центра инерции [6] можно написать два дифференциальных уравнения:
Переходим к составлению дифференциальных уравнений малых колебаний ротора вокруг главных центральных осей инерции. Главные моменты количества движения системы с точностью до малых величин первого порядка малости включительно будут:
L X
= ITocx + IPtoa2; LY
= I T o c 2 - 1 P toa 1 ;
LZ = IPto, где IP – полярный момент инерции относитель-
но центра масс ротора; IT – поперечный момент инерции относительно центра масс ротора.
Используя теорему об изменении главного момента количества движения в относительном движении к центру инерции [6] и подставляя выражение (1) получаем:
I p to (y 2 — y i ) + I t ( X 2 — X i) — С i х 1 1 1 L + С 2 х 2 1 2 L — - F R 1 1 1 L cos ф + F R 2 1 2 L cos ф — FT11 1 L sin ф +
+ F T 2 1 2 L sin Ф = ( I T — I P ) 5 L to 2 cos( to t — 9 ); (4)
I P to (x 2 — x j ) — I T ( y2 — .У 1 ) + С 1 y 1 1 1 L — С 2 y 2 1 2 L +
+ F R 1 1 1 L sin ф — F R 2 1 2 L sin ф — F T 11 1 L cos ф +
+ F T 2 1 2 L cos ф = ( I P — I T ) 5 L to 2 sin( to t — 9 ). (5)
Для решения уравнений (2) – (5), которые представляют малые колебания ротора, удобно перейти к полярным координатам ( e, ф ), которые связаны с декартовыми координатами соотношениями:
x i = e i • cos ф , i = 1,2; y i = e i • sin ф , i = 1, 2,
Дифференцируя выражения (6) дважды по времени и подставляя результаты в уравнения (2) – (5), получим систему из 4-х нелинейных уравнений движения жесткого ротора с четырьмя степенями свободы на опорах с ГДД. Рассмотрим случай прямой синхронной прецессии:
e 1 = e 2 = 0; e 1 = e2 = 0;
ф = to; ф = 0; ф = tot + ф0
где ф 0 - постоянная интегрирования, определяющая собой сдвиг фаз между возбуждающей силой Р ц = М • А • to и вызываемым ею перемещениям вибратора e .
С учетом этих допущений уравнения (2) – (5) примут вид:
F 1 cos( to t + ф 0) — F 2 sin( to t + ф 0) = G cos to t ;
F 1 sin( to t + ф 0) + F 2 cos( to t + ф 0) = G sin to t ;
F 3 cos( to t + ф 0) + F 4 sin( to t + ф 0) = A cos( to t — 9 );
F 5 sin( to t + ф 0) + F 4 cos( to t + ф 0) = — A sin( to t — 9 ).
где
F i = L ( С i e i + С 2 e 2 + P R 1 + P R 2 ) — m to 2( 1 1 e 2 + 1 2 e i );
F 2 = L ( F < 1 + F t 2 );
F 3 = to 2 ( e 2 — e i )( I p — IT ) + L ( С 2 e 2 1 2 — С 1 e i 1 1 + P R 2 1 2 — P R 1 1 1 );
F 4 = L ( F t 2 1 2 — F t 1 1 1 );
F 5 = L ( С 1 e i 1 1 — С 2 e 2 1 2 + F R 1 Ц — F R 2 1 2 ) — to 2 ( e 2 — e i )( I P — I T );
A = ( I P — IT ) to 2 L 5 ; G = mL Ato 2.
Полученную систему нелинейных уравнений аналитически решить невозможно, поэтому воспользуемся методом численного решения в среде математического пакета MATLAB. Составленная программа позволяет осуществлять поиск всех корней в заданном диапазоне изменения величин e1,e2,0 . Начальные параметры задавались из решения задачи о колебаниях жесткого ротора СТ на ГДД как материальной точки из работы [4].
По изложенной методике были определены амплитудно-частотные характеристики (АЧХ) ротора СТ (рис. 1). Исходные данные для расчета: m = 255 кг , C 1 = C 2 = 10 9 , L = 0,465 м , 1 1 = 0,036 м , 1 2 = 0,501 м , I P = 5,489 кг м 2 , to РАБ = 860 рад / сек , IT = 19,291 кг м 2 . Моменты инерции и масса получены по трехмерной модели ротора, остальные параметры взяты из чертежей серийной СТ.
Результаты расчетов представлены в виде совмещенных графиков (рис. 2), на которых верхний левый рисунок – это АЧХ жесткого ротора с ГДД, рассчитанные по описанной выше методике, а нижние рисунки – соответственно значение угла ф 0 и коэффициента передачи Ц , показывающего, во сколько раз усилие, передаваемое на корпус через демпфер, больше статической неуравновешенности ротора. Верхний правый рисунок показывает АЧХ ротора, рассчитанные согласно методике [4] со всеми вышеприведенными параметрами и дается для качественного анализа корректности работы программы.
По оси абсцисс всех графиков отложена безразмерная частота вращения ротора to = toto РАБ . По оси ординат для всех верхних графиков показана безразмерная амплитуда колебаний Б = e/ 5 0 , где 5 0 - зазор в демпфере. Сплошной линией показаны результаты расчета для первой опоры, а штриховой линией для второй опоры. Расчет произведен без учета влияния инерции жидкости (параметр инерции
to5)2 Р л ст =------= 0 , где Ц0 - динамическая вяз-
Ас кость жидкости, р - плотность жидкости) и при относительном дисбалансе U = — = 0,3 . При 50
расчетах варьировался только параметр демп- фирования B =
3 LB.
4 mtoРАБ I 50 J где D – диа-
метр вибратора, LB – длина вибратора,.
Анализ рисунков 2-7 показывает, что полученные зависимости не противоречат известным решениям [4] и существенно уточняют картину вынужденных колебаний системы “жесткий ротор СТ - ГДД”.
Кроме этого отметим, что при использовании короткого ГДД в случае полного охвата с выбран-
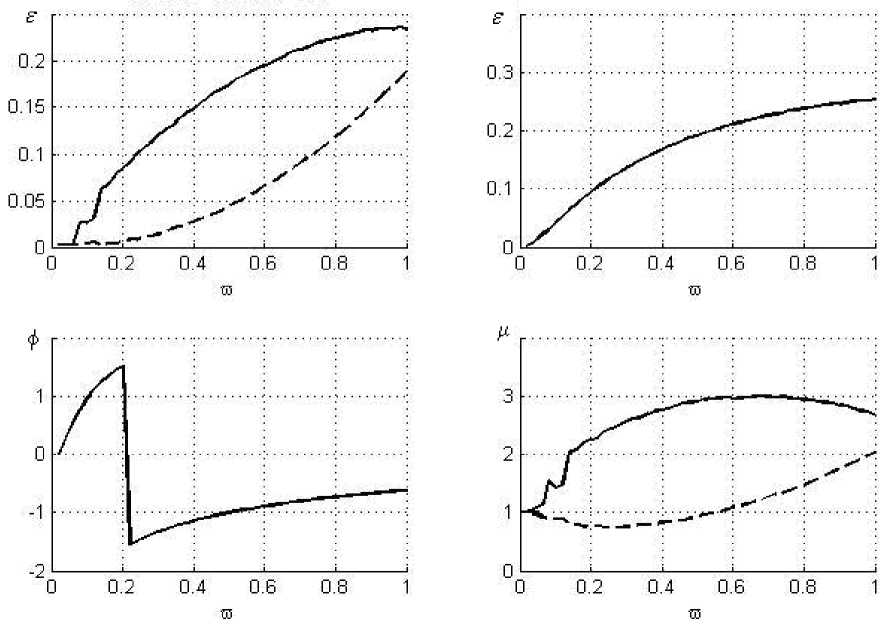
Рис. 2. Результат расчета ротора СТ для короткого ГДД при полном охвате a = 0; B = 0.05; U = 0.3
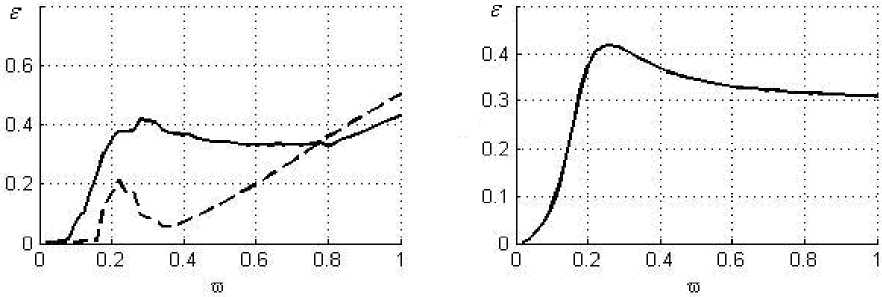
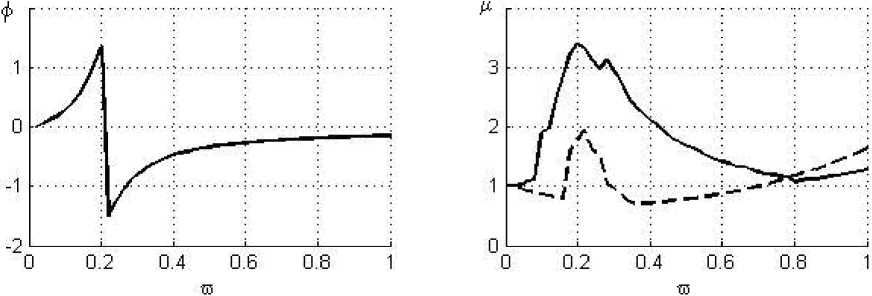
Рис. 3. Результат расчета ротора СТ для короткого ГДД при полном охвате a = 0; B = 0.01; U = 0.3
ными параметрами выгодным оказалось пониженное демпфирование (рис. 4). В этом случае значения коэффициентов передачи по обеим опорам на рабочем режиме не превышают единицы, а ампли- туда колебаний растет, но находится в приемлемых границах. Более высокое значение параметра B приводит к передемпфированию (рис. 2, 3) и усилению передаваемых на корпус усилий.
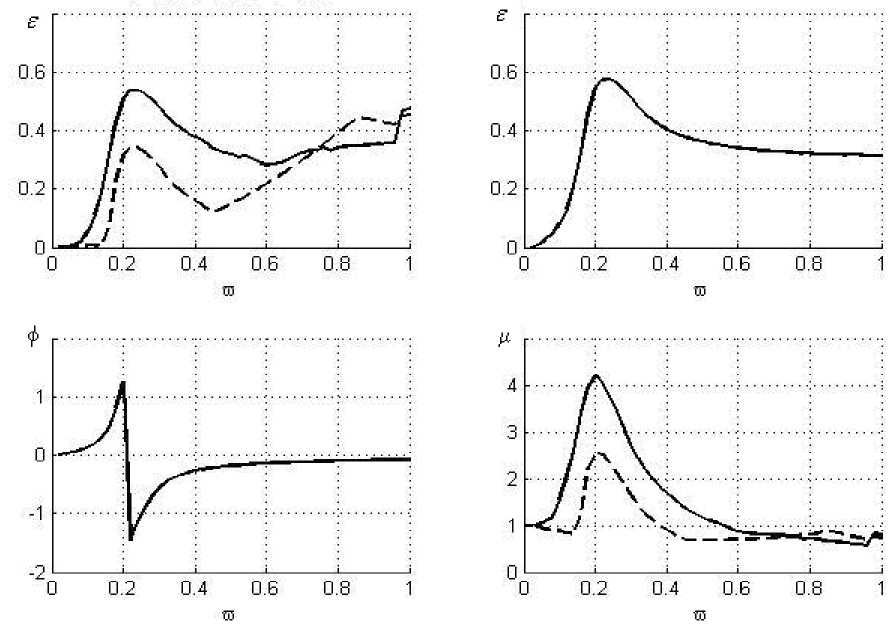
Рис. 4. Результат расчета ротора СТ для короткого ГДД при полном охвате a = 0; B = 0.005; U = 0.3
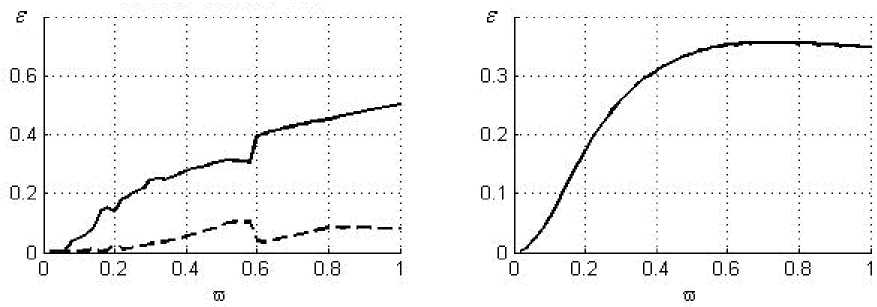
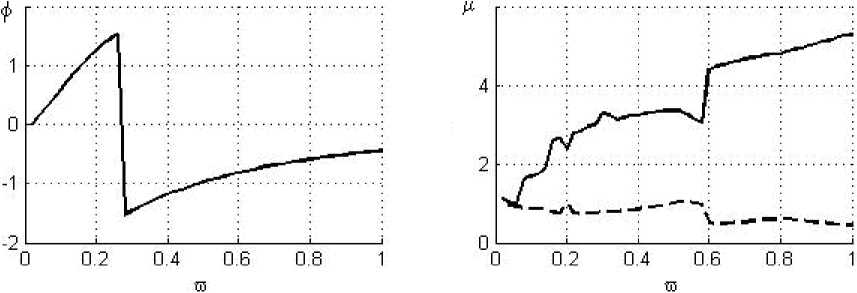
Рис. 5. Результат расчета ротора СТ для короткого ГДД при половинном охвате a = 0; B = 0.05; U = 0.3
При оценке короткого ГДД в случае половинного охвата можно указать на нарастающее увеличение зон неустойчивости (рис. 5-7) по мере снижения демпфирования. На графиках эти зоны характеризуются участками внезапного изменения знака приращения функции с постепенным возвращением к нормальному виду. Это говорит о недостаточном демпфировании,
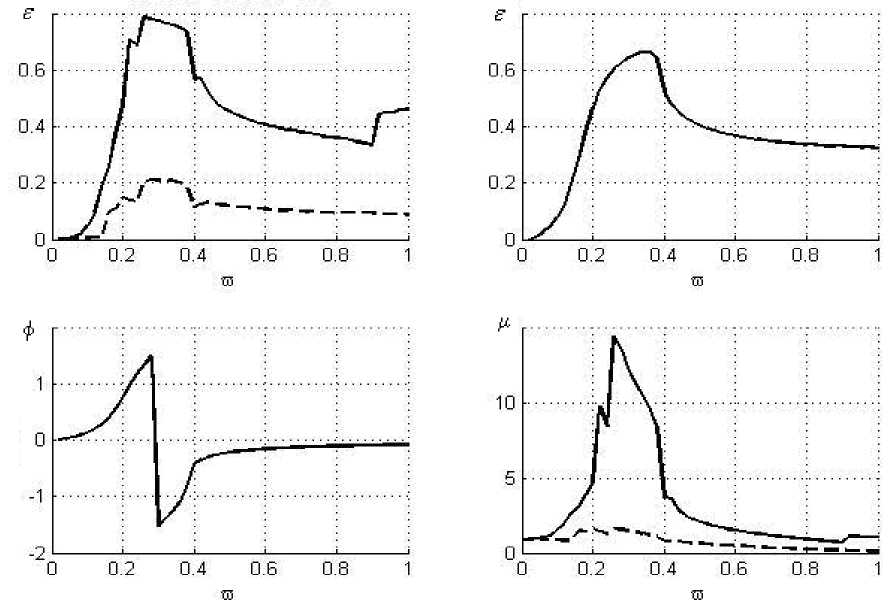
Рис. 6. Результат расчета ротора СТ для короткого ГДД при половинном охвате a = 0; B = 0.01; U = 0.3
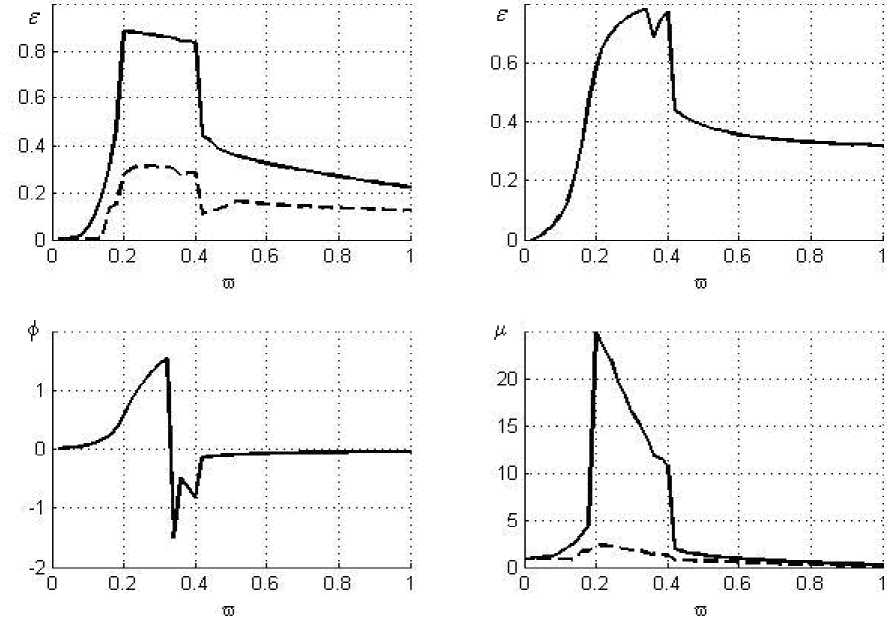
Рис. 7. Результат расчета ротора СТ для короткого ГДД при половинном охвате a = 0; B = 0.005; U = 0.3
что ведет к разрыву масляной пленки под воздействием радиальных сил, появляющихся в ГДД с половинным охватом. Такое положение объясняется большим влиянием безразмерного параметра демпфирования B на АЧХ из-за наличия в формуле радиальной силы добавки, не зависящей от инерции жидкости. Следствием этого же является высокие значения коэффици- ента µ на всем рабочем диапазоне частот вращения, что приводит к невозможности применения короткого ГДД при половинном охвате с такими параметрами (в первую очередь жесткости С1 , С2 и зазорδ0 ) и требует проведения оптимизации. Отсутствие срывных зон (рис. 5-6) на АЧХ, полученных в [4] при всех прочих равных условиях обуславливается заложенными в этой методике допущениями.
ВЫВОДЫ
-
1. Получено решения задачи вынужденных колебаний ротора СТ с ГДД в опорах с учетом нелинейности гидродинамических сил.
-
2. Показано, что так же, как и в одномассовом роторе, могут возникать срывные режимы работы.
-
3. Необходимо дальнейшее проведение многоплановой оптимизации конструкции и параметров ГДД, что позволит успешно внедрить их
в опоры СТ и конечном счете во многом решить задачу увеличения ресурса всего ГПА.
Список литературы Динамика жесткого ротора свободной турбины двигателя НК-14СТ-10 с применением демпферов опор
- Балякин В.Б., Новиков Д.К., Рыжинский И.Н., Стукалов В.П. Вибрационная доводка двигателя НК12СТ//Авиационная промышленность. 1990. № 8. С. 15-17.
- Новиков Д.К., Балякин В.Б., Клячин Ю.А., Кулагин С.Н., Медведев С.Д. Снижение вибрации двигателя НК12СТ//Газовая промышленность. 1998. № 12. С. 36-37.
- Кельзон А.С., Циманский Ю.П., Яковлев В.И. Динамика роторов в упругих опорах. М.: Наука, 1982. 280 с.
- Белоусов А.И., Новиков Д.К., Балякин В.Б. Гидродинамические демпферы опор роторов турбомашин: Учеб. пособие. Самара: КуАИ, 1991. 95 с.
- Медведев С.Д., Фалалеев С.В., Новиков Д.К., Балякин В.Б. Повышение эксплуатационной надежности ГПА развитием конвертированных авиационных технологий. Самара: СНЦ РАН, 2008. 371 с.
- Бать М.И., Джанелидзе Г.Ю., Кельзон А.С. Теоретическая механика в примерах и задачах. М.: Наука, 1968. Т. 2. 560 с.
