Дистанционный контроль водоемов с борта судна со стеклянным дном

Автор: Деулин Б.И.
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Перспективные проекты
Статья в выпуске: 4 (8), 2015 года.
Бесплатный доступ
Изобретение лазеров в 60-х годах ХХ века привело к созданию и широкому распространению дистанционных оптических методов контроля состояния окружающей среды. Применению этих методов контроля и улучшению характеристик оборудования для их реализации посвящено множество работ. Настоящая статья посвящена дистанционному контролю состояния водной среды методом комбинационного рассеяния света. Рассмотрен случай, когда лидар (оптический локатор) установлен на судне со стеклянным дном или подводном аппарате.
Загрязнение водоемов, дистанционный контроль, лидар, комбинационное рассеяние, лазер, водная среда
Короткий адрес: https://sciup.org/14770115
IDR: 14770115 | УДК: 504.064:504.453:656.612:666.162:692.53
Текст научной статьи Дистанционный контроль водоемов с борта судна со стеклянным дном
Воздействие Человека на окружающую среду носит все более возрастающий характер. Одним из проявлений такого воздействия является ее загрязнение. Далеко не редким явлением стали техногенные аварии и катастрофы, сопровождающиеся выбросом различных вредных веществ. В связи с этим возникает необходимость в разработке оперативных методов контроля, которые бы позволяли мгновенно осуществлять сбор и обработку информации и выдавать результаты о состоянии окружающей среды в удобной форме. Таким требованиям отвечают дистанционные оптические методы контроля, возникшие после создания лазеров в 60-х годах ХХ века. Они обладают экспрессностью, которая связанна с возможностью эффективного преобразования света, несущего информацию об объекте, с которым взаимодействовал, в электрические сигналы, техника автоматической обработки хорошо развита; высокой чувствительностью при определении примесей, связанной с принципиальной возможностью регистрировать сверхслабые свечения; универсальностью методов оптической спектроскопии при идентификации состава и определении содержания веществ.
Все оптические методы основываются на применении оптических локаторов (лидаров), которые могут быть установлены на различные носители: автомобили, самолеты, плавательные средства и т.д., что в значительной степени повышает оперативность и 190
экспрессность контроля. Лидар - аббревиатура из начальных английских слов Light Detection and Ranging.
Дистанционный контроль состояния водоемов осуществляется различными методами, одним, из которых является метод комбинационного рассеяния света. Несмотря на низкие сечения рассеяния это метод обладает рядом преимуществ, а именно, он позволяет произвести определение исследуемой компоненты относительно какой-либо другой, концентрация которой известна, что существенно упрощает интерпретацию данных лазерного зондирования по сравнению с другими методами. Из-за низких сечений, при применении спонтанного комбинационного рассеяния, возможно определять вещества при относительно больших концентрациях (г/л). Например, проводить мониторинг соленых озер или определять растворенные в воде газы, такие как, кислород, наличие которого важно для всех живых организмов, населяющих данный водоем.
Возможности метода существенно возрастают на резонансных частотах (резонансное комбинационное рассеяние). При этом сечения возрастают на порядок и выше. Однако для широкого применения резонансного комбинационного рассеяния необходимо наличие мощных лазеров с перестраиваемой частотой.
Методом комбинационного рассеяния света можно осуществлять дистанционный контроль температуры водоемов с точностью до 10С на глубине до 30 м (азотный лазер, Х0=337нм). Увеличение глубины контроля может быть осуществлена путем подбора лазера с большей проникающей способностью [1]. Принцип измерения основан на одновременном существовании в воде мономерных и полимерных молекул, количество которых является функцией температуры рис.1. В работе [2] данный способ измерения температуры предлагался для определения теплового загрязнение водоемов.
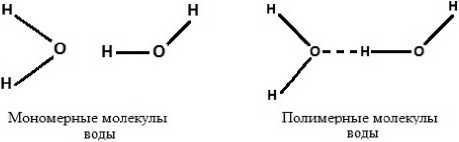
Рисунок 1 - Мономерные и полимерные молекулярные составляющие воды
Так как
пропорциональна выражение
интенсивность комбинационного рассеяния числу молекул, можно записать следующее
-
1 мономер момономер f (Г) ^ полимер ^ полимер
где: T – температура; f(T) – функция температуры; I мономер – интенсивность сигнала комбинационного рассеяния от мономерных молекул;
Iполимер – интенсивность сигнала комбинационного рассеяния от полимерных молекул; Cмономер – концентрация мономерных молекул; C полимер – концентрация полимерных молекул.
Контроль состояния водоемов может производиться с различных технических средств, например, с борта вертолета или судна. Однако в данном случае на результаты мониторинга может влиять наличие ряби или волн на поверхности водоема, а так же, такие погодные явления как туман. Для избегания этого влияния можно использовать суда со стеклянным дном или с иллюминаторами, расположенными под водой, подобные тем, которые известны лицам, посетившим египетские курорты на Красном море, рис. 2.
Рисунок 2 - Судно со стеклянным дном
В ряде случаев удобно оснастить оборудованием для дистанционного оптического контроля исследовательские подводные плавательные аппараты.
Получение опытных данных по лазерному дистанционному зондированию основано на применении уравнения лидара. Уравнение лидара в случае комбинационного рассеяния света в газовой среде для мощности сигнала имеет вид [1]:
A
P = KgP0
R
KP
da J dqJ
ctN ехр(-2т) —И
Где Р – мгновенное значение принимаемой мощности в момент времени t; P0 – посылаемая мощность в момент времени t0 ; с – скорость света; tu - длительность импульса; T - оптическая толщина участка; К - коэффициент потерь в оптике; g - геометрический фактор; N - плотность компоненты; A - эффективная площадь приемника; R - расстояние; (do/dQ^K - дифференциальное сечение рассеяния для исследуемой компоненты/
Данное уравнение справедливо для прямоугольного импульса и при условии, что R>>ct u /2. Современные нано- и пикосекундные лазеры дают возможность реализации данного условия. Их характеристиками приведены в [3,4].
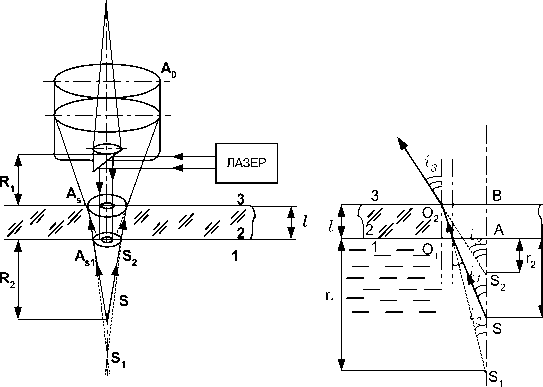
Для рассмотренного выше случая данное уравнение требует модификации, в связи с распространением лазерного импульса в трех средах: воде, стекле и воздухе, рис.3. Будем считать, что зондирующее излучение вертикально падает на иллюминатор.
R 2
а)
б)
Рисунок 3 а) ход лучей гидрологического лидара при прохождении зондирующего излучения через три среды: 1- водная среда, 2-cтекло, 3-воздух. б) ход лучей при прохождении через границы раздела трех сред.
Произведем соответствующую модификацию уравнения гидрологического лидара (1). Рассмотрим рисунок 3.
Из ΔSO 1 A и ΔS 1 O 1 A имеем :
/O 1 A/ = /SA/tgi 1 = /S 1 A/tgi 2
/O 1 A/ = R 2 tgi 1 =r 1 tgi 2
r 1= R 2 tgi 1 /tgi 2
Ввиду малости углов и учитывая закон преломления света имеем:
tgi 1 / tgi2 ~ sini , / sini2 =n2/n 1
r 1= R 2 n 2 / n 1
Из A S 1 O 2 B и A s2O2B имеем
/O 2 B/=/S 1 B/ tgi 2 =(r 1 +l)tgi 2 /O 2 B/=/S 2 B/tgi 3 =(r 2 +l)tgi 3
( r +1) tgi3 sin i3 n
---- = «---3 = -2- = n 2
v r2 +1) tgi 2 sin i 2 n3
т.к. n 3 -1
r + 1
----- = n 2
r2 +1
r +1 . r +1 — nl
r2 = —--1 = ------—
n2 n2
Излучение исходящее с глубины R2 распространяется в телесном угле Q.
n = ASL
R 2 2
где AS1 – площадь внутри поля зрения приемника на поверхности воды. Переходя через границу раздела двух сред: вода -стекло лучи претерпят преломление и на поверхности стекла образуется площадка АS подобная площадке AS1. Из рис. 3 б). видно, что A s 1 O2B ~A s 1 O 1 A
[O 2 B] G A s ; [O i A] g A si
/ O 1 A / / AS 1 /
/ O 2 B / / S 1 B /
/AS 1 /=r 1 ; /S 1 B/=r 1 +l
/ O.B / / 5B / r + 1 л l ,
—2— = —1— = -— = 1 + — = k =
/ O 1 A / / AS 1/ r 1 r 1
в то же время из рис. 3 б) видно, что
1 + —^_ к R 2 n 2 J
Q =
AS
AO
= AO ( Г 2 + I ) 2
5 " ( / + Г 2 + R l ) 2
A S
A S1 =As/ k2
AO (r2 + l)2
A S 1
AO (r2 + l )2
= ( l + r2 + R i ) 2
1+ТГ к R 2 n 2 J
( l + Г 2 ) 2 П 2
( l + r 2 + R i ) 2 ( R 2 n 2 + 1П 1 ) 2
A 0 l + ’
r + l
— П 2 1
к
Q =------
. r +1 l + J---
n 2 J
n 2 2
—
n 2 l + R 1 ( R 2 n 2 + 1n 1 ) 2
к
Q =
n 2 j
A 0 ( r i + l ) 2 П 22
( r + I + n 2 R ) 2 ( R 2 n 2 + ln ) 2
Q =
( R 2 n 2 / n i + l + n 2 R i ) 2 ( R 2 n 2 + ln i ) 2
q =---- An--—
( R 2 n 2 / n i + l + n 2 R i ) 2 n i
Теперь запишем уравнение лидара для данного случая:
P = Кд ф р Q LB- ( d a I d Q ) KP NTT T 2 T 3 (2)
где К – коэффициент потерь в оптике; g-геометрический фактор; ϕ – двусторонний коэффициент пропускания на границе раздела сред: воздух/стекло - стекло /воздух; £ - двусторонний коэффициент пропускания на границе раздела сред: стекло /вода -вода/ стекло; L B - длина импульса в пробе; T i - функция ослабления сигнала в i - той среде.
Запишем уравнение лидара (2) для исследуемой компоненты
Р х = Кдф^Р0 Q х ^- ( d a I d Q )f N x T i T 2 T 3
В качестве компоненты сравнения возьмем воду. Запишем уравнение лидара (2) для молекул воды:
Рв = Кдф^0 Q в LB (da I dQ) f NbTT T3
Найдем отношение сигналов
PX = QX (da I dQ)KP NX PB QB (da I dQ)KPNb
N x =
PxQв (da IQ)KP N PBQ X (da I dQ)Kp B to =
^ B
Q x
n 2 (^ B ) [ R 2 n 2 (^ X ) + lni (^ X ) + n i (^ X ) n 2 (^ X ) R ! ]
n 22 ( ^ X ) [ R 2 n 2 ( ^ B ) + lni ( ^ B ) + n i ( ^ B ) n 2 ( ^ B ) R i ] 2 (3)
Nx = ^Pl (da I dQ)T (4)
N b P b ( d a I d Q ) Kp
Значение ώ находится из выражения (3).
Вывод. Данное уравнение позволяет дистанционно определять концентрации различных веществ находящихся в водоеме относительно молекул воды или определять температуру водной среды при условии что зондирующее излучение лазера падает вертикально на иллюминатор судна, который находится под водой.
REMOTE CONTROL OF WATER BODIES FROM SHIP WITH
Annotation. The invention of lasers in the 60s of the twentieth century led to the creation and wide dissemination of remote optical methods for monitoring the environment. The application of these methods to control and improve the performance of equipment for their implementation has been widely discussed. This article is dedicated to remote monitoring of the aquatic environment by Raman spectroscopy. The case where the lidar (optical locator) is installed on a vessel with a glass bottom, or submersible.
Список литературы Дистанционный контроль водоемов с борта судна со стеклянным дном
- Потапов А.И., Черкасов В.Н. Лазерные методы дистанционного контроля водной среды: уч. пособие. -СПб.: СЗПИ, 1993, 64с.
- Деулин Б.И. Дистанционный контроль температуры водоемов//Энергосберегающие технологии и техника в сфере АПК. Сборник материалов к межрегиональной выставки-конференции 17-19 ноября. -Орел: ОрелГАУ, 2010, с 293-296.
- Деулин Б.И. Природные водоемы и их дистанционный контроль методом комбинационного рассеяния света: Электронное учебно-методическое пособие. -Орел: ОрелГАУ, 2012, 101 с.
- CZL лабораторное оборудование -Режим доступа: http://www.czl.ru/
