ДВЕ МЕТОДИКИ ИЗМЕРЕНИЯ ПОМЕХ ДЕКАМЕТРОВОГО ДИАПАЗОНА

Автор: А. О. Щирый
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Системный анализ приборов и измерительных методик
Статья в выпуске: 4, 2023 года.
Бесплатный доступ
Представлены две методики измерения помех декаметрового диапазона. Первая методика позволяет извлекать информацию о станционных помехах из данных радиозондирования ионосферы линейно-частотномодулированными сигналами. Таким образом могут быть одновременно измерены характеристики и сигнала, и помех; повышается информативность существующего метода зондирования ионосферы. Однако в этом случае прием осуществляется в специфическом режиме радиозондирования, что несколько ограничивает возможности измерения помех, например измерения их абсолютных величин. Если нужны характеристики только помех, то целесообразно использовать вторую методику, функционирующую в режиме обычного "классического" радиоприема. Вторая методика представляет собой универсальную гибкоперестраиваемую методику измерения панорам спектра помех различных видов, ее гибкость заключается в возможностях широкого варьирования параметров измерений помех, в том числе над сохраненными измерительными данными после проведения измерительного эксперимента, что позволяет применять одни и те же данные для исследований с различными целями. Вторая методика может комплексироваться с зондированием ионосферы. Описанные методики реализованы в составе аппаратно-программных комплексов зондирования ионосферы различных исполнений. Также приведена методика оценки уровня фонового шума по панораме спектра помех. В перспективе возможна реализация алгоритма панорамного измерения помех всех видов для более широкого диапазона, чем декаметровый (но включая его). Предлагается делать это на основе технологии программно определяемого радио (Software Defined Radio).
Измерение помех, помехи декаметрового диапазона, спектр помех, радиозондирование ионосферы, наклонное зондирование ионосферы
Короткий адрес: https://sciup.org/142238616
IDR: 142238616 | УДК: 621.3.09
TWO METHODS FOR MEASURING HF BAND NOISE
Two methods of measuring HF band noise are presented. The first method allows you to extract information about station interference from data on ionospheric radiosounding using linear-frequency-modulated signals – thus, the characteristics of both the signal and interference can be measured simultaneously; the informativeness of the existing ionospheric sounding method increases; however, in this case, reception is carried out in a specific radiosounding mode, which somewhat limits the possibilities of measuring noises, for example, measuring their absolute values. If only interference characteristics are needed, then it is advisable to use the second technique, which operates in the mode of a conventional "classical" radio reception. The second method is a universal, flexible method for measuring panoramas of the spectrum of noises of various types. Its flexibility lies in the possibility of wide variation of the parameters of interference measurements, including processing the stored measurement data after the experiment finishes, which allows you to use the same data for research with different purposes; the second technique can be combined with ionospheric sounding. The described methods are implemented as part of hardware and software complexes of various designs for ionospheric sounding. A technique for estimating the background noise level based on a panorama of the interference spectrum is also given. In the future, it is possible to implement an algorithm for panoramic measurement of interference in all kinds of ranges wider than a decameter one (but including it). It is proposed to do this on the basis of Software Defined Radio technology.
Текст научной статьи ДВЕ МЕТОДИКИ ИЗМЕРЕНИЯ ПОМЕХ ДЕКАМЕТРОВОГО ДИАПАЗОНА
Работа радиотехнических систем (РТС) дека-метрового (ДКМ) диапазона основана на способности коротких волн (КВ) многократно отражаться от ионосферы и земной поверхности, поэтому адаптация таких РТС к ионосферным условиям является важнейшим фактором обеспечения их корректной работы. Для указанной адаптации проводят оперативную диагностику ионосферы [1–6], состояние которой зависит от времени суток и сезона года, солнечной и геомагнитной активности и других факторов, как правило, носящих случайный характер. Традиционно для диагностики среды распространения в интересах радиолокации используется возвратно-наклонное зондирование (ВНЗ) ионосферы, а в интересах систем связи — наклонное зондирование ионосферы (НЗИ). Целесообразно дополнять средства диагностики также средствами вертикального (ВЗ) зондирования ионосферы, особенно в точках отражения лучей наклонных трасс от ионосферы [1–4]. Наиболее перспективным является выбор сигнала с линейно- частотной модуляцией (ЛЧМ) в качестве зон-дирующего[1].
Кроме многочисленных и сложных эффектов распространения самого сигнала, необходимо учитывать помехи ДКМ-диапазона различной природы. Поэтому, как правило, адаптация РТС ДКМ-диапазона к ионосферным условиям путем выбора оптимальной рабочей частоты состоит из двух шагов: выбора наилучших частотных диапазонов с точки зрения прохождения радиосигнала, а затем — в пределах этих диапазонов — выбора поддиапазонов с наименьшей загруженностью помехами.
Радиопомехи могут возникнуть внутри радиоприемного устройства (РПУ), это внутренние помехи, и вне РПУ, т.е. в среде распространения — это внешние помехи.
Уровень собственных шумов современных РПУ ДКМ-диапазона существенно ниже минимального уровня внешних помех даже в высокочастотной части ДКМ-диапазона (> 20 МГц). Практический интерес могут представлять различные виды внутренних помех, возникающих в приемнике при действии на него мощных станционных помех (превышающих динамический диапазон), в том числе внеполосных [7, 8]. В настоящей работе не рассматривается все многообразие внутренних помех радиоприемных устройств, включая те, что вызваны внеполосными воздействиями [7, 8], а также шумы антеннофидерных систем. В режиме калибровки РПУ измеряется только интегральный уровень собственных шумов в зависимости от частоты.
Внешние помехи подразделяются на активные и пассивные. Разновидностями активных помех в ДКМ-диапазоне являются [9–12]: помехи, обусловленные тепловым излучением земной поверхности, атмосферные помехи, космические (галактические) помехи, помехи от радиостанций (сосредоточенные помехи), индустриальные помехи. Помехи, имеющие сравнительно равномерный спектр мощности, иногда называют фоновыми помехами. Фоновые помехи природного происхождения с медленной динамикой (атмосферные флуктуационные, галактические, тепловые) вместе называют естественными фоновыми помехами.
В настоящей работе не рассматриваются помехи, называемые в радиолокации пассивными (мешающие отражения от земной и водной поверхности, помехи от метеорологических образований) [9]. Не рассматриваются также вопросы радиоэлектронной борьбы (РЭБ), т.е. не рассматриваются т.н. активные маскирующие помехи [9].
Проблематика антенн и углов прихода сигналов требует отдельного рассмотрения и в настоящей статье не затрагивается. Отметим только в качестве иллюстрации, что в системе частотного обеспечения австралийского загоризонтного радиолокатора Jindalee [13] измерения помех проходят в два этапа. Целью первого этапа является получение зависимости спектральной плотности помех от частоты, для чего производится сканирование в заданном диапазоне частот. На первом этапе используется антенна с широкой диаграммой направленности. Затем по данным, полученным на первом этапе, выбираются наиболее "тихие" участки (участки с наименьшим уровнем помех) в каждом интервале 1 МГц. На втором этапе в выбранных участках измеряются уровни фонового шума с использованием восьми антенн, имеющих узкие диаграммы направленности, что позволяет определять направление прихода радиопомех в горизонтальной плоскости. Отметим также, что для систем радиосвязи направление прихода радиопомех не столь существенно, как для систем радиолокации.
Вообще, в зависимости от целей исследования к аппаратуре и методу измерений помех предъявляются различные требования. Так геофизические исследования не требуют высокого разрешения по частоте, потому что для построения суточных, годовых и других зависимостей не нужно знать "тонкую" структуру шумов (которая к тому же сильно подвержена быстрым флуктуациям), а требуется накопление статистических данных за длительный период. Кроме того, измерение шумов должно производиться в абсолютных единицах — единицах измерения напряженности поля. Значит, перед каждым сеансом измерения нужно производить калибровку радиоприемного устройства (РПУ), учитывать тип антенны, ее диаграмму направленности и прочие характеристики. Для задач радиосвязи, радиолокации и радионавигации, наоборот, измерения могут проводиться в относительных единицах, но важно высокое спектральное разрешение метода и аппаратуры, как, например, при выборе узкополосных (десятки или сотни герц) каналов, а также возможность оперативной диагностики и экспресс-анализа.
Отметим, что существует класс устройств, сочетающих в себе требования точного (и даже нормированного) измерения абсолютных величин с высоким разрешением по частоте, это т.н. измерительные приемники (применяемые, как правило, совместно с измерительными антеннами), предназначенные для решения задач мониторинга использования каналов и диапазонов частот, анализа электромагнитной обстановки, контроля электромагнитной совместимости, радиоконтроля и радиоразведки.
В качестве примера методик измерения помех для задач радиосвязи и радиолокации, описанных в литературе, можно привести [10]. Эта методика позволяет получить интегральные оценки загруженности частотных каналов и заключается в следующем. Сигнал с выхода приемника, дискретно во времени, подается на интегратор, где интегрируется за 1.5 или 5 с, а далее через преобразователь на вход регистрирующего устройства (цифропечатающей машинки). После регистрации измерения автоматический коммутатор осуществляет перестройку приемника на следующую частоту. Разрешение по частоте определяется шириной полосы РПУ, что не позволяет измерять "тонкую" структуру помех. В [10] также рассматривается вопрос о пересчете напряжения на входе приемника в напряженность поля.
Другим примером является спектральный монитор загруженности канала, входящий в состав частотного обеспечения радиотехнических систем ДКМ-диапазона, выпускаемых фирмой Barry Research (Barry Research Communications. AN/TRQ-35(v) Tactical frequency Management System). Монитор загруженности канала может работать в двух режимах: сканирование частотного диапазона 2–30 МГц (или его части) и контроль за отдельной частотой. Ширина каналов 3 кГц, расположены через 2 кГц. Спектр помех отображается в виде гистограммы 0–30 дБ; порог отсчета взят относительно собственных шумов.
ИЗМЕРЕНИЕ СТАНЦИОННЫХ ПОМЕХ В ХОДЕ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ ЛЧМ-СИГНАЛАМИ
Так как работа ионозонда во многих случаях осуществляется в режиме энергетической скрытности, то появляется возможность использовать данные зондирования для мониторинга помеховой обстановки в ДКМ-диапазоне, расширяя измерительные возможности ионозонда.
Разработан алгоритм автоматического измерения станционных (сосредоточенных) помех в процессе радиозондирования ионосферы сигналами с ЛЧМ [14, 15]. Особое внимание измерению станционных (сосредоточенных) помех было обусловлено тем, что это доминирующие помехи практически во всем ДКМ-диапазоне. Извлечение из данных радиозондирования информации о помехах других видов тоже возможно [5], но требует предварительного выделения и полезного сигнала на ионограмме, поэтому в данной работе не рассматривается.
Сначала была построена модель преобразования помех в тракте приемника ЛЧМ-сигнала [14, 15]. Показано что станционная помеха, сосредоточенная по спектру, после преобразования в РПУ ЛЧМ ионозонда становится импульсной (точнее, ЛЧМ-квазиимпульсом). На основе анализа оценок моментов распределения смеси сигнала и помех разработан адаптивный алгоритм обнаружения сосредоточенных по спектру помех, прошедших приемник ЛЧМ ионозонда [14, 15]. Основная его идея заключается в следующем. Сигнал разностной частоты с выхода
РПУ ионозонда длительностью T разбивался на K неперекрывающихся элементов длительностью Tэ . Величина Tэ выбиралась таким образом, чтобы соответствующая полоса частот А fэ была равна среднему значению ширины спектра сосредоточенной помехи. Для каждого к -го элемента сигнала находились несмещенные оценки среднеквадратичного отклонения (СКО) σk . Двухмодальность выборки σk говорит о наличии в ней сосредоточенной помехи, и производится цензурирование этой выборки для выделения отсчетов, принадлежащих помехе. Значимость различий между σk оценивается на основе критерия обнаружения грубых ошибок в экспериментальных измерениях, справедливого для большого числа законов распределения [16]. Если для величины σk выполняется оценка
I o k - о | < s - ( 1.55 + 0.8 V E + 2 - lg( K /10) ) , (1)
1K где о =— ^о,, s — СКО для значений а^ E — Kt1 '
эксцесс, то нет оснований считать это значение значительно отличающимся от среднего. Если неравенство (1) для некоторого элемента не выполняется и o k > о, то предполагается, что этот элемент сигнала относится к сосредоточенной помехе. Достоинством этого алгоритма является также то, что обнаружение осуществляется на основе оценок характеристик сигнала, без выбора закона распределения.
Оценена эффективность работы алгоритма. По данным моделирования вероятность правильного обнаружения сосредоточенной помехи составила 99%, а вероятность ложной тревоги 3%. По экспериментальным данным (1500 выборок сигнала полосой 100 кГц из 300 сеансов НЗИ радиолинии Великобритания – Нижний Новгород, 16–19 декабря 2003 г.) вероятность правильного обнаружения помехи составила 95% [5, 14, 15].
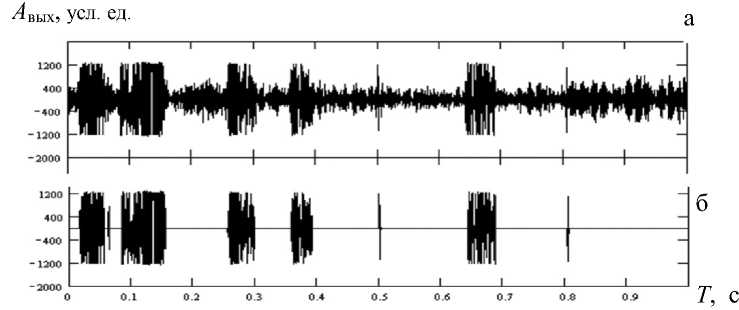
Рис. 1. Осциллограммы.
а — сигнал разностной частоты; б — участки сигнала, выделенные как сосредоточенные помехи
На рис. 1 в качестве примера приведены осциллограммы (сеанс НЗИ Великобритания – Нижний Новгород, 16.12.2003, 10:52 МСК) сигнала разностной частоты (рис. 1, а) и участков сигнала, выделенных как сосредоточенные помехи (рис. 1, б). Видно, что применение предложенного алгоритма обнаружения позволяет неплохо выделять сосредоточенные помехи.
Обнаруженная помеха является объектом дальнейшего исследования: можно оценить такие параметры как число помех в заданной полосе частот (полоса частот – помехи), вероятность появления помехи в случайно выбранном канале с заданной полосой и т.п. [5, 15]. При вычислении "ширины" (т.е. величины занимаемой частотной полосы) сосредоточенной помехи возникает задача восстановления разрывов в последовательностях отсчетов, идентифицированных как помеховые. Разрывы, как правило, составляют величину в один-два отсчета (т.к. частотная полоса пропуска существенно меньше полос соседних обнаруженных помех, то можно утверждать с высокой долей вероятности, что обе эти помехи и пропуск между ними представляют собой одну помеху). Вообще, для удаления одиночных выбросов целесообразно использовать медианный фильтр. Однако в данном случае его прямое применение привело бы к удалению обнаруженных узкополосных помех (занимающих полосу, аналогичную полосе удаляемых пропусков). Поэтому потребовалась модификация фильтра, а именно, введение условия его применения: значение отсчета заменяется значением медианы только в случае, если этот отсчет не идентифицирован ранее как принадлежащий помехе.
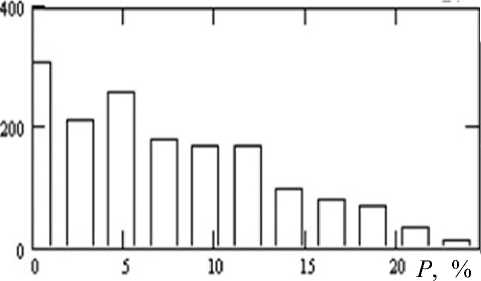
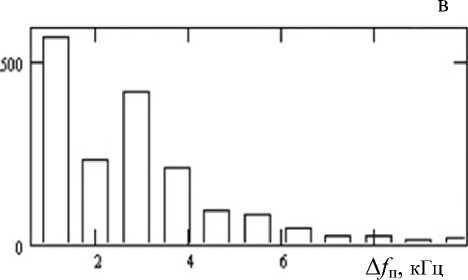
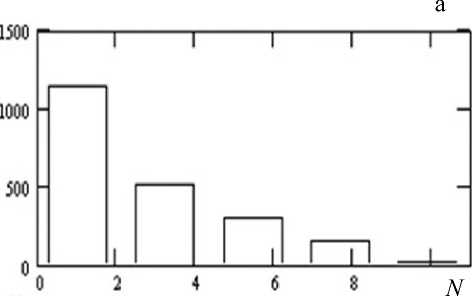
Рис. 2. Гистограммы распределений N (а), Р (б), Δ f п (в) по данным экспериментов
В ходе обработки той же выборки экспериментальных данных, по которой оценивалась вероятность обнаружения, исследовались обнаруженные помехи. Вычислялись следующие параметры: число помех N в полосе частот Δ f = = 100 кГц, полоса частот помехи Δ f n , вероятность Р появления сосредоточенной помехи в случайно выбранном канале с полосой в 3 кГц. На рис. 2 представлены гистограммы распределения этих параметров по всем обработанным данным. На рис. 2, в, выделяется пик в окрестности 3 кГц, который соответствует характерной полосе частот радиовещательных станций.
Отдельное направление работ (выходящее за рамки темы данной статьи) — очистка ионограммы от сосредоточенных помех, т.е. улучшения качества работы самого ионозонда, когда обнаруженная помеха не является объектом исследования, а подавляется [14] путем режек-тирования либо наложения весовой функции.
Такое подавление сосредоточенных помех является этапом предварительной подготовки данных для дальнейшей обработки ионограммы и извлечения данных из нее (например, вычисления АЧХ радиолинии) [5, 6, 17, 18].
ГИБКОПЕРЕСТРАИВАЕМЫЙ АЛГОРИТМ ПОЛУЧЕНИЯ ПАНОРАМЫ СПЕКТРА ПОМЕХ (ВСЕХ ВИДОВ)
Важнейшим достоинством алгоритма измерения сосредоточенных помех по данным НЗИ, описанного выше (кроме возможности извлечения дополнительной информации из данных НЗИ), является одновременное измерение характеристик и сигнала, и помех. Однако, если потребителя интересуют характеристики только помех, то целесообразно разработать специальный алгоритм измерения помех не в режиме ЛЧМ, а в режиме обычного "классического" приема. Такой алгоритм позволит производить измерения с широчайшими возможностями по изменению параметров (в то время как в режиме ЛЧМ-приема есть "привязка" к параметрам работы ЛЧМ-передатчиков и т.п., а если осуществлять прием в режиме ЛЧМ, "отвязавшись" от расписания передатчиков и их параметров, то пропадает основная мотивация использования ЛЧМ-режи-ма — одновременное измерение и помех, и прохождения сигнала).
Такой алгоритм был разработан [5, 19]. Основная его идея заключается в том, что последовательно с заданным шагом происходит перестройка РПУ в заданном диапазоне, РПУ "стоит" на текущей частоте заданное время, сигнал с низкочастотного выхода РПУ оцифровывается, далее над оцифрованным сигналом выполняется быстрое преобразование Фурье (БПФ). Полученные спектры, выстроенные последовательно, в общем, и представляют собой панораму спектра помех (но есть некоторые тонкости).
Вообще, у информации о частотно-временнóй структуре помех могут быть разные потребители, и разнообразие задач ведет к противоречивым требованиям к измерительным данным. Так, геофизические исследования, как правило, не требуют высокого разрешения по частоте, потому что для построения суточных, годовых и других зависимостей не нужно знать "тонкую" структуру шумов (которая к тому же сильно подвержена быстрым флуктуациям), а требуется накопление статистических данных за длительный период. Для задач радиосвязи, радиолокации и радионавигации, наоборот, важно высокое частотное разрешение. Разработанный алгоритм позволяет в широких пределах варьировать параметры обработки, благодаря чему разработанный измерительный комплекс может быть использован как для изучения тонкой структуры помех, так и для исследования вариаций параметров помех.
Перестройка РПУ происходит последовательно с установленным шагом. Причем шаг перестройки примерно равен полосе РПУ (как показано ниже, шаг несколько меньше полосы).
В зависимости от целей исследования задаются:
f н и f к — начальная и конечная частоты сканируемого интервала;
tf — время измерения на одной частоте (один спектр);
n — число сканирований интервала (для усреднения по сканированиям);
δ p — результирующее разрешение по частоте (для усреднения по частотам);
Δ f фон — интервал выбора уровня фонового шума.
Исходя из характеристик приемника задаются: Δ f — полоса пропускания РПУ;
t п — время перестройки РПУ.
Время перестройки РПУ учитывается следующим образом: отсчеты сигнала, приходящиеся на это время, отбрасываются. Поэтому разность t f – t п назовем значимым временем измерения на частоте tu . Строго говоря, это время на практике еще немного корректируется так, чтобы соблюдалось следующее условие: произведение частоты дискретизации и этого времени — целое число. При несоблюдении этого условия на один спектр (соответствующий времени измерения на данной частоте) приходится нецелое число отсчетов. Дробные отсчеты приходилось бы отбрасывать, что приводило бы к небольшой погрешности в определении частоты, соответствующей этому блоку отсчетов. При управлении перестройкой РПУ также учитывается реальное значение времени измерения на частоте.
Частота дискретизации f д сигнала выбирается из соображения необходимости обеспечения полосы анализа больше, чем полоса пропускания РПУ Δ f ( f д > 2 Δ f ), т.е. ближайшая бóльшая от удвоенной полосы РПУ (если нет возможности задания точно требуемой, а только выбор из фиксированного списка частот дискретизации).
Число точек БПФ выбирается ближайшим бóльшим (степень числа 2) от произведения частоты дискретизации и значимого времени измерения на частоте:
ceil(log2 ( f д ( tf - t п)))
N БПФ = 2 ,
где ceil — функция округления в бóльшую сторону.
Отношение полосы анализа (половина от частоты дискретизации) к числу спектральных элементов (( N БПФ / 2) + 1) определяет спектральное разрешение. Увеличение времени измерения на частоте позволяет увеличить спектральное разрешение.
В полосе РПУ выбирается для дальнейшей обработки полоса, которую назовем полезной Ду^. Для чего отбрасываются частотные участки в полосе РПУ перед ней (Л^Д и после нее (ЛУУ; шаг перестройки РПУ должен быть равен А Уд. Нижняя часть полосы РПУ (А Ун) отбрасывается для исключения низкочастотных наводок (от электросети и др.). Необходимость отбрасывания верхней части полосы РПУ (АУУ обусловлена особенностью аппаратуры и методики измерений: частота дискретизации не может регулироваться плавно и выбирается ближайшей большей от удвоенной полосы РПУ, т.о. полоса анализа БПФ несколько больше, чем полоса РПУ. При задании Д^г требуется учесть "лишнюю" полосу. Отбрасывание полос учитывается при вычислении величины шага перестройки Д f^ так что все полезные полосы Д /, выстраиваются последовательно без пропусков и наложений, образуя непрерывную панораму спектра помех. Поэтому реальный шаг перестройки Д fn меньше полосы РПУ Д / ‘
Величина интервала, приходящегося на один спектральный элемент, определяется отношением полосы анализа БПФ и числа спектральных элементов. Поэтому заданные Ду^ и Ду^2 выравниваются по границам ближайших спектральных элементов.
Для снижения влияния широкополосных импульсных помех (ближние грозы), способных вызывать в т.ч. внеполосные искажения в РПУ, используется следующий алгоритм [16]. Вначале в выбранном частотном диапазоне для повышения устойчивости оценки спектра измерения производятся п раз. Среди выборочных спектров отсеиваются те, которые подвергались воздействию широкополосной импульсной помехи.
Для определения факта воздействия вычисляется математическое ожидание спектральной плотности и определяется пороговый уровень. Спектры, для которых математическое ожидание превышало порог, отбрасывались. Эта помеха может быть как природного происхождения (ближние грозы), так и искусственного (индустриальные помехи). Нужно отметить, что эта помеха является импульсной в "обыкновенном" режиме работы приемника, в то время как станционная помеха становится импульсной (точнее, ЛЧМ-квазиимпульсом) только в режиме ЛЧМ-приема.
Повышение статистической устойчивости спектра возможно за счет потери разрешения по частоте путем суммирования т соседних спектральных компонент (для достижения заданного разрешения Др) либо за счет потери разрешения по времени. Последний вариант в рамках данной методики может быть осуществлен двумя способами: увеличением времени измерения на частоте tj либо сканированием заданного интервала заданное число раз п с последующим усреднением панорамы спектра помех по всем п сканированиям. Важно то, что эти действия могут производиться над сохраненными оцифрованными данными после процесса измерений, т.е. одни и те же данные могут быть обработаны с разными параметрами и использоваться для разных целей исследования.
На рис. 3 в качестве примера показаны спектры помех с разрешением 5Р = 10 кГц (тонкая линия), 5р = 1 МГц (жирная линия). Здесь и далее примеры основаны на данных круглосуточного измерения помех в приемном пункте г. Йошкар-Ола в марте 2001 г. [5]. ' '
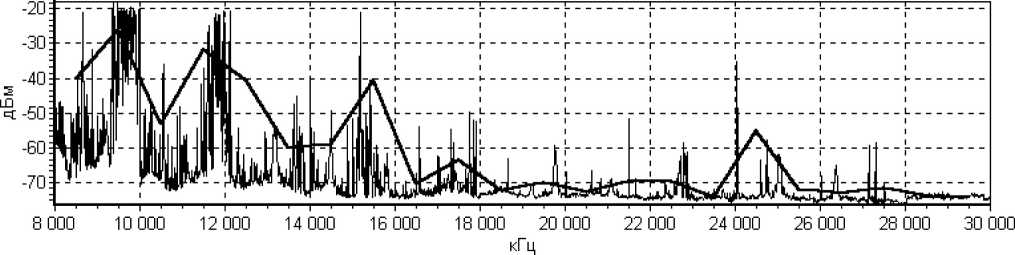
Рис. 3. Спектры помех с разрешением <5Р = 10 кГц (тонкая линия), <5Р = 1 МГц (жирная линия)
Получайте e-mail уведомления о выходе нового номера журнала. Подписка на странице
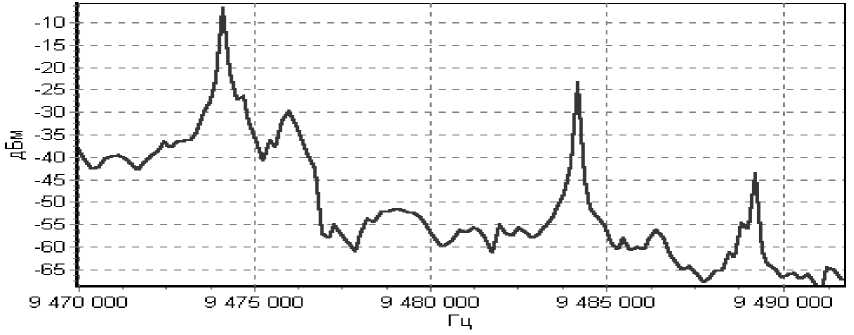
Рис. 4. Фрагмент спектра помех с частотным разрешением 200 Гц
На рис. 4 в качестве примера показан фрагмент спектра помех с высоким частотным разрешением (200 Гц). Видно, что помехи, которые, скорее всего, можно идентифицировать как станционные, занимают полосы примерно 1–2 кГц, в то же время имеются частотные диапазоны шириной менее 1 кГц, практически не занятые станционными помехами.
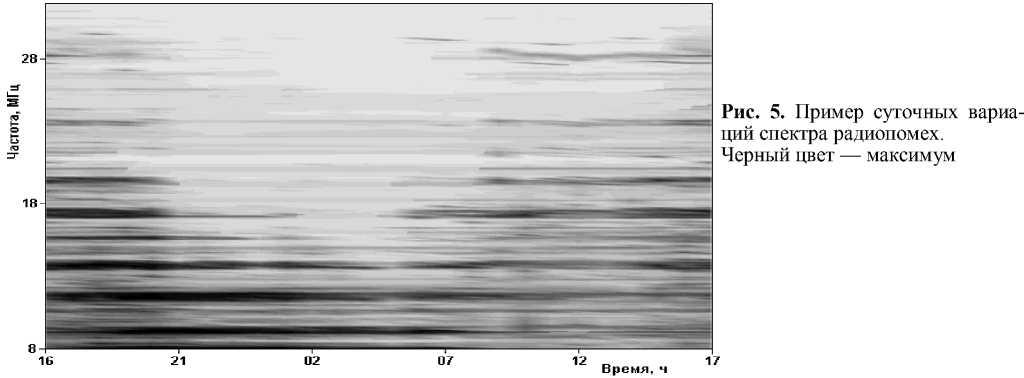
Результаты измерения помех за сутки могут быть наглядно представлены в виде спектрограммы — развертки спектров помех, выстроенных в ряд вертикально таким образом, что по горизонтальной оси представлено время снятия спектра помех, по вертикальной — частоты спектра, а цветом или яркостью изображены значения спектральных элементов (см. рис. 5, по данным измерений в г. Йошкар-Ола, 18– 19 марта 2001 г.). На представленном рисунке видны диапазоны, занятые мощными радиовещательными станциями. Ночью (21 ч – 05 ч) происходит смещение загруженности по частоте, что объясняется смещением к нижним частотам диапазона распространения радиоволн в ночное время и маневрированием рабочей частоты (в пределах набора разрешенных частот) радиопередатчиков.
Предусмотрен режим калибровки АЧХ РПУ [5]. В этом режиме на вход РПУ подается гармонический сигнал известного уровня и частоты; в файле сохраняется частотно-зависимый коэффициент усиления РПУ (отношение уровня выходного сигнала к уровню эталонного сигнала), используемый для коррекции АЧХ РПУ на этой частоте. Процедура повторяется для заданного частотного диапазона с заданным шагом. Отдельно измеряется интегральный уровень собственных шумов РПУ (с отключенной антенной) в зависимости от частоты; этот уровень характеризует минимальный уровень помех, который способна измерить конкретная аппаратура.
Также отметим, что для задач геофизики, как правило, измерение шумов должно производиться в абсолютных единицах — единицах измерения напряженности поля, поэтому нужно не только производить калибровку РПУ, но и учитывать АЧХ антенно-фидерной системы, а также методически корректно учитывать диаграммы направленности антенн. Эти вопросы в настоящей работе не рассматриваются, приведенные здесь данные рассчитаны по входу РПУ.
Заслуживает отдельного упоминания методика выделения фонового шума из смеси помех всех видов. Напомним, что здесь под фоновым шумом понимается шум природного происхождения с медленно меняющимися характеристиками, т.е. без атмосферных импульсных помех, без станционных и индустриальных помех, другими словами, под фоновым шумом понимается сумма помех (атмосферный флуктуационный, тепловой, галактический шумы), уровни которых на порядки меньше уровней (и медленнее меняются во времени) мощных помех природного (атмосферный импульсный шум — ближние грозы) и антропогенного (станционные и индустриальные) происхождения. Вообще, измерение фонового шума — отдельное направление, важное для геофизики. Но, например, в системе частотного обеспечения австралийского радиолокатора Jindalee [13] измерение фонового шума также производится. Применяемая методика основана на гипотезе, что минимальный уровень помех в диапазоне определяется фоновым шумом (что, конечно, не будет соответствовать действительности для диапазона, полностью забитого помехами "не фоновых" видов). Для оценки уровня фонового шума по панораме спектра помех на выбранной частоте в заданном частотном интервале Δ f фон (10 кГц – 1 МГц) выбираются частотные элементы с минимальным уровнем помехи, который принимается за уровень фонового шума на этом интервале. Иллюстрация результатов приведена на рис. 6, где разрешение усредненного спектра помех (тонкая линия)
10 кГц, фонового шума на интервале Δ f фон = 1 МГц (толстая линия), причем выделение фонового шума произведено на тех же данных, что на рис. 3.
ЗАКЛЮЧЕНИЕ
Описанные методики реализованы в составе аппаратно-программных комплексов зондирования ионосферы различных исполнений [5]. Первая методика позволяет извлекать информацию о станционных помехах из данных радиозондирования ионосферы ЛЧМ-сигналами. Таким образом могут быть одновременно измерены характеристики и сигнала, и помех; повышается информативность существующего метода зондирования ионосферы. Однако в этом случае прием осуществляется в специфическом режиме радиозондирования, что несколько ограничивает возможности измерения помех, например измерения их абсолютных величин (а также параметры измерений привязаны к параметрам сеансов зондирования, прежде всего временные параметры). Поэтому если требуются характеристики только помех, то целесообразно использовать вторую методику, функционирующую в режиме обычного "классического" радиоприема. Вторая методика представляет собой универсальную гибкоперестраиваемую методику измерения панорам спектра помех различных видов. Ее гибкость заключается в возможностях широкого варьирования параметров измерений помех, в том числе над сохраненными измерительными данными после проведения измерительного эксперимента, что позволяет применять одни и те же данные для исследований с различными целями. Немаловажно, что и вторая методика может комплексироваться с зондированием ионосферы путем соответствующего составления расписания экспериментов с различными режимами измерений (а также динамического изменения расписания на основе экспресс-анализа данных, полученных в предыдущих сеансах).

Рис. 6. Спектр помех разрешением 10 кГц (тонкая линия) и фоновый шум при Δ f фон = 1 МГц (жирная линия)
На основе результатов измерений возможно построение (уточнение) полуэмпирических моделей радиопомех (как части фоноцелевой обстановки при комплексном имитационном моделировании), в т.ч. для моделирования и проектирования РТС различного назначения [20].
Также в планах дальнейших работ — реализация алгоритма панорамного измерения помех всех видов для более широкого диапазона, чем ДКМ (но включая ДКМ), на основе технологий т.н. "программно определяемых систем" (Software Defined Radio, SDR), что может представлять интерес для радиотехнических систем уже не только ДКМ-диапазона, но и других диапазонов, а также для целей геофизических исследований. Просматриваются два принципиально различных методических направления: первое — сохранение полного потока "сырых" измерительных данных с целю дальнейшей детальной обработки (включая методы обработки временных рядов и методы теории обучения машин); второе — экспресс-анализ помех в реальном времени, в т.ч. с использованием DSP (Digital Signal Processor) на борту SDR, получение неких описательных "моментальных" оценок характеристик помех, а также усредненных за нужное время "макрохарактеристик". При таком измерении помех в широких диапазонах придется решить техническую проблему коммутации антенн (разные диапазоны требуют разных антенн, да даже нижняя и верхняя части одного диапазона) и методическую проблему нормализации данных (поскольку разные антенны обладают разными коэффициентами усиления и диаграммами направленности). Могут оказаться полезными эксперименты по организации измерений на границах диапазонов на разные антенны для одного и того же небольшого частотного интервала с целью дальнейшего сравнения и выработки методики нормализации данных. Также в случае SDR-приемников имеется проблема отсутствия входных преселекторов, в результате чего SDR-приемники более, чем традиционные, подвержены влиянию мощных помех, особенно внеполосных. Возможно, потребуется дооснащение SDR-приемников преселекторами, "позаимствованными" от традиционных приемников ДКМ-диапазона. В качестве SDR-приемников для указанных целей нами рассматриваются Winradio WR-3500i-DSP и USRP N210. Устройство Winradio WR-3500i-DSP это плата SDR, компьютерный ДВ/СВ/КВ/УКВ приемник с возможностями радиосканера, диапазон частот на прием: 0.15–2600 МГц. Также рассматривается SDR-устройство USRP N210, привлекательное тем, что для него уже есть реализации режимов ВЗ и НЗИ в открытых исходных кодах [21], что позволяет легко реализовать комплексирование режимов измерения помех и радиозондирования ионосферы.
Список литературы ДВЕ МЕТОДИКИ ИЗМЕРЕНИЯ ПОМЕХ ДЕКАМЕТРОВОГО ДИАПАЗОНА
- 1. Филипп Н.Д., Блаунштейн Н.Ш., Ерухимов Л.М., Иванов В.А., Урядов В.П. Современные методы исследования динамических процессов в ионосфере. Кишинев: Штиинца, 1991. 286 с.
- 2. Акимов В.Ф., Калинин Ю.К. Введение в проектирование ионосферных загоризонтных радиолокаторов / Под ред. С.Ф. Боева. М.: Техносфера, 2017. 492 с.
- 3. Алебастров В.А., Гойхман Э.Ш., Заморин И.М., Колосов А.А., Корадо В.А., Кузьминский Ф.А., Кукис Б.С. Основы загоризонтной радиолокации / Под ред. А.А. Колосова. М.: Радио и связь,1984. 256 с.
- 4. Fabrizio G. High Frequency Over-the-Horizon Radar: Fundamental Principles, Signal Processing, and Practical Applications. McGraw-Hill Education, 2013. 944 p.
- 5. Щирый А.О. Разработка и моделирование алгоритмов автоматического измерения характеристик ионосферных коротковолновых радиолиний: Автореф. дис. … канд. техн. наук. СПб.: Санкт-Петербургский гос. ун-т телекоммуникаций им. проф. М.А. БончБруевича, 2007. 19 c.
- 6. Колчев А.А., Щирый А.О., Недопекин А.Е. Математические модели и методики измерения АЧХ многолучевых ионосферных коротковолновых радиолиний. Йошкар-Ола: Мар. гос. ун-т, 2013. ISBN 978-5-94808-762-7. 147 с.
- 7. Ред Э.Т. Схемотехника радиоприемников. Практическое пособие: пер. с нем. М.: Мир, 1989. 152 с.
- 8. Поляков В. О реальной селективности КВ-приемников // Радио. 1981. № 3. С. 18–20.
- 9. Максимов М.В., Бобнев М.П., Кривицкий Б.Х., Горгонов Г.И., Степанов Б.М., Шустов Л.Н., Ильин В.А. Защита от радиопомех / Под ред. М.В. Максимова. М.: Сов. радио,1976. 496 с.
- 10. Комарович В.Ф., Сосунов В.Н. Случайные радиопомехи и надежность КВ-связи. М.: Связь, 1977. 134 с.
- 11. Хмельницкий Е.А. Оценка реальной помехозащищенности приема сигналов в КВ диапазоне. М.: Связь, 1975. 232 с.
- 12. Распространение по земному шару атмосферных помех и их характеристики. Отчет 322: Документы X Пленарной Ассамблеи МККР, Женева, 1963. М.: Связь, 1965. 80 с.
- 13. Earl G.F., Ward B.D. The frequency management system of the Jindalee over-the-horizon backscatter HF radar // Radio Science. 1987. Vol. 22, no. 2. P. 275–291. DOI: 10.1029/RS022i002p00275
- 14. Колчев А.А., Щирый А.О. Режекция сосредоточенных по спектру помех при ЛЧМ зондировании ионосферы // Известия высших учебных заведений. Радиофизика. 2006. Т. 49, № 9. С. 751–759. URL: https://elibrary.ru/item.asp?id=9209029
- 15. Колчев А.А., Щирый А.О. Оценивание параметров сосредоточенных по спектру помех на выходе приемника ЛЧМ ионозонда // Известия высших учебных заведений. Радиоэлектроника. 2007, № 5. C. 5461. URL: https://elibrary.ru/item.asp?id=12878495
- 16. Новицкий П.В. Зограф И.А. Оценка погрешностей результатов измерений. Л.: Электроатомиздат, 1991. 304 с.
- 17. Колчев А.А., Щирый А.О. Восстановление частотной зависимости комплексного коэффициента отражения по данным наклонного ЛЧМ ионозонда // Оптика атмосферы и океана. 2007. Т. 20, № 7. С. 627–630. URL: http://ao.iao.ru/ru/content/vol.20-2007/iss.07/9
- 18. Shiriy A.O. HF channel transmit function module measurement // 5th International Conf. on Actual Problems of Electron Devices Engineering, APEDE 2002. 5. 2002. P. 365–369. DOI: 10.1109/APEDE.2002.1044964
- 19. Колчев А.А., Шумаев В.В., Щирый А.О. Гибкоперестраиваемая методика измерения радиопомех // Технологии электромагнитной совместимости. 2007. № 1. С. 50–54. URL: https://elibrary.ru/item.asp?id=22766702
- 20. Коновальчик А.П., Плаксенко О.А., Щирый А.О. Обоснование облика перспективных радиолокационных станций посредством разрабатываемой отечественной системы автоматизированного проектирования // Наукоемкие технологии в космических исследованиях Земли. 2019. Т. 11, № 1. C. 4–11. URL: https://cyberleninka.ru/article/n/obosnovanie-oblikaperspektivnyh-radiolokatsionnyh-stantsiy-posredstvomrazrabatyvaemoy otechestvennoy-sistemy
- 21. GNU Chirp Sounder [Электронный ресурс]. Sodankylä Geophysical Observatory. Дата обращения: 22.06.2022. URL: https://www.sgo.fi/~j/gnu_chirp_sounder/
