Движение экипажа на упругих колесах

Автор: Привалов С.А., Халиков Т.М.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и промышленность
Статья в выпуске: 5-2 т.11, 2009 года.
Бесплатный доступ
В статье рассматриваются явление увода колеса, возникающее при качении упругих колес, эластичных как в радиальном, так и в поперечном направлении при действии боковой нагрузки; а также исследуются некоторые свойства функций нагружения и анизотропии колеса, применяемых при моделировании данного процесса.
Упругое колесо, нагружение, анизотропия, моделирование
Короткий адрес: https://sciup.org/148198735
IDR: 148198735 | УДК: 539.5.621.01
Movement of the vehicle on elastic wheels
In article are observed the phenomenon of the wheel withdrawal, originating at rolling motion of elastic wheels, elastic both in radial and in transverse direction at act of lateral loading; and also some properties of loading func-tions and anisotropy of the wheel, applied at modeling of given process are researched.
Текст научной статьи Движение экипажа на упругих колесах
При движении жесткого колеса по жесткой опорной поверхности под действием силы, направленной под некоторым углом к плоскости колеса, увод практически незаметен, при качении же обрезиненного колеса или, более того, колеса с пневмошиной увод становится значительным. Что касается бокового увода колеса, или поперечного упругого скольжения, то его можно реально наблюдать на колесных транспортных средствах.
Рассмотрим автомобиль, у которого управляющие упругие колеса находятся под некоторым углом, и проследим, в каком направлении будет двигаться колесо, когда на него действует сила тяги F . Очевидно, что направление действия силы и плоскость колеса не совпадают. Существуют различные варианты [1, 6] учета этого явления при практических расчетах, но все они обладают одним существенным недостатком: они не позволяют решать обратную задачу – как по известному направлению качения колеса определить направление и величину действующей на него силы. Использование функции нагружения колеса [ 4, 5 ] позволяет решать как прямую, так и обратную задачи. Необходимо лишь подобрать такую форму функции нагружения f , чтобы нормаль к ней в каждой точке приложения силы соответствовала направлению качения колеса. При этом следует отметить, что функция нагружения колеса должна удовлетворять некоторому требованию: она должна быть невогнутой, что объясняется необходимостью обеспечения принципа максимума скорости диссипации механической работы [3]. Можно показать, что из этого условия вытекает необходимость направления скорости движения колеса строго по нормали к линии
нагружения. В противном случае движение колеса будет неустойчивым: при отклонении действующей на колесо силы в одном направлении направление скорости движения колеса может отклоняться в другом направлении. Однако важным является необходимость учета того, что направления действующей силы и скорости движения колеса могут не совпадать.
В каждом конкретном случае может быть использован свой способ учета расхождения направления действия силы и направления качения колеса: например, сама функция нагружения может быть представлена в виде эллипса, или при достижении силой F какого-либо участка границы функции нагружения f отклонение направления качения колеса от нормали в каждой точке может быть представлено [2, 3, 5] в виде некоторой функции а = а (f, F, е). (1)
Эта зависимость определяет, в каком направлении будет двигаться колесо, имеющее функцию нагружения f и подвергающееся воздействию силы F , направленной под углом е к плоскости колеса. Эта же зависимость позволит при решении обратной задачи находить направление и величину действия силы при известном направлении качения колеса.
На рис. 1 показано, что качение абсолютно жесткого колеса по абсолютно жесткой поверхности начинается с момента, когда величина вектора силы F достигает прямолинейного участка линии нагружения и становится равной Fi. При этом значение составляющей Fхi становится равным силе сопротивления движению Fс в плоскости колеса (качению), а составляющая Fуi вызывает увод колеса, и величина увода (угол аi отклонения вектора скорости движения vi от плоскости колеса) будет зависеть именно от величины Fуi [1, 2, 4, 6]. Действительно, под действием нагрузки Fi, направленной под некоторым углом ei к плоскости колеса, вектор скорости движения колеса vi отклоняется от нормали к первоначальной линии нагружения на угол ai и образует с вектором силы Fi угол
Ф . = £ i - a t . (2)
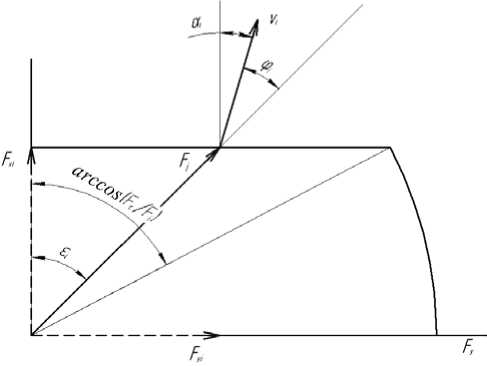
Рис. 1. Отклонение вектора скорости движения колеса с уводом от направления действия силы
При отклонении вектора скорости vi от нормали к функции нагружения колеса нарушается условие перпендикулярности вектора скорости к «первоначальной» функции нагружения, которую имеет колесо до начала действия силы. Однако функция нагружения в процессе нагружения колеса некоторой силой [2-4] обладает свойством изменять свое положение, поэтому при достижении прикладываемой к колесу силой некоторой величины (вектор силы достигнет линии нагружения) функция нагружения в этой точке совершает поворот на угол a , равный величине угла отклонения вектора скорости от нормали к первоначальной линии нагружения. В результате вектор скорости движения колеса станет перпендикулярным к этой «новой» линии нагружения (рис. 2). Сила сопротивления качению станет равной Fcx , которая и определяет скорость движения колеса. Сила Fcy определяет величину угла а отклонения вектора скорости от нормали к исходной функции нагружения. На рис. 2 видно, что сопротивление качению F c K оказывается несколько больше, чем при качении в плоскости колеса Fxo . Таким образом, при действии на колесо некоторой силы по известной из эксперимента зависимости (1) можно всегда рассчитать направление движения колеса. Кроме того, такой подход позволяет решать и обратную задачу: как по известному принудительному движению колеса определить величину и направление действующей на колесо силы.
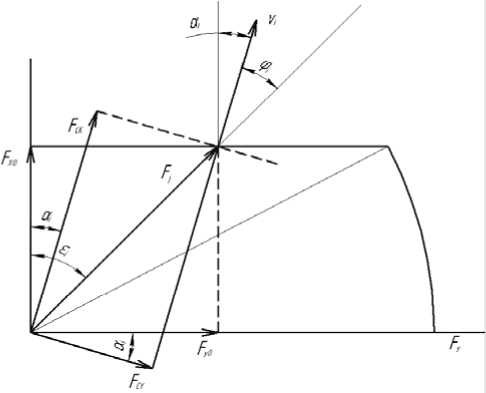
Рис. 2. Изменение функции нагружения при качении колеса с уводом под действием силы, направленной под углом к плоскости колеса
Аналогично пространству сил введем пространство скоростей движения колеса экипажа Ср, в котором прямоугольные координаты рассматриваемой точки равны компонентам вектора скорости v p . Это означает, что каждому значению вектора vp в пространстве Ср соответствует некоторая точка или радиус-вектор vp , которая некоторую линию равного уровня, называемую в математической теории пластичности диссипативной функцией. Тогда по аналогии с функцией нагружения соответствующая скорости сила, действующая на колесо, должна быть направлена по нормали к этой линии.
Таким образом, рассмотренная модель движения колеса может быть введена двумя эквивалентными путями: или через определение функции нагружения, или через определение диссипативной функции. При этом в обоих случаях необходимо формулировать принцип максимума. Использование функции нагружения позволяет описать анизотропные свойства колеса. Это можно сделать, если в пространстве сил каждой фиксированной функции нагружения поставить в соответствие функцию анизотропии [3], являющуюся годографом вектора сил относительно вектора скорости (нормали) в соответствующей точке линии нагружения (рис. 3). При построении линии анизотропии вектор F откладывается от фиксированной оси ОО 1 в направлении, которое он образует с вектором скорости (нормалью) в данной точке линии нагружения. Очевидно, что для круглой изотропной функции нагружения замкнутая линия стягивается в точку на расстоянии F от начала отсчета на оси ОО 1 .
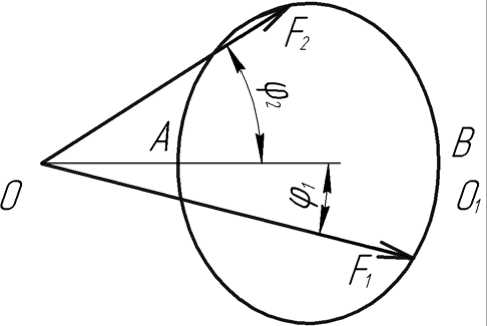
Рис. 3. Построение функции анизотропии
Необходимо заметить, что линию анизотропии можно построить для разных уровней диссипативной функции. Для устойчивых систем отрезок АВ (рис. 3) будет увеличиваться, причем точки А и В будут двигаться в противоположных направлениях, для неустойчивых систем отрезок АВ будет изменяться, при этом точки А и В будут двигаться в одном направлении. Угол отклонения вектора скорости от вектора силы в точке, принадлежащей функции нагружения, показывает, что колесо двигается в направлении скорости v, а возникающие при этом силы сопротивления Fx и бокового увода Fy и составляющие в сумме результирующую силу F , представляют собой динамическую характеристику колеса. Тогда построенную функцию анизотропии можно считать по аналогии с крылом полярой колеса, которая показывает зависимость величины действующей на колесо силы F от угла отклонения плоскости колеса от направления его движения (сравним с углом атаки крыла) или иначе соотношение сил сопротивления Fx и сил увода Fу (подъемной силы крыла в аэрогидродинамике). Зная зависимость (1), можно определить зависимость ε = ε(α), затем по известному направлению действующей на колесо силы – рассчитать величину вектора силы как расстояние от начала координат до границы функции нагружения f.
Выводы:
-
1. На основе сделанных предположений и допущений сформулирован новый класс моделей движения колеса, который позволяет описывать поведение колеса и определять параметры его движения при различных условиях нагружения.
-
2. Построена функция нагружения колеса, которая, являясь важнейшей характеристикой его механических свойств, однозначно определяет направление его движения. Установлено, что вектор скорости движения колеса не всегда совпадает с направлением действия силы и должен быть направлен по нормали к функции нагружения.
-
3. Построена поляра колеса, характеризующая его анизотропность.
Список литературы Движение экипажа на упругих колесах
- Додонов, Б.М. Математическая модель системы «Дорога-шина-рулевое управление-автомобиль»/Б.М. Додонов, А.А. Хачатуров, М.М. Хорев//В сб.: Устойчивость управляемого движения автомобиля. Труды МАДИ, выпуск 130. -М.; 1979. -С. 59-69.
- Ивлев, Д.Д. К теории сложных сред/Д.Д. Ивлев//ДАН СССР. -1963. -148, №1. -С. 64.
- Ивлев, Д.Д. Теория упрочняющегося пластического тела/Д.Д. Ивлев, Быковцев Г.И. -М.; Наука, 1971. -232 с.
- Привалов, С.А. Качение с уводом колес монорельсового транспорта//Вклад ученых вузов в научно-технический прогресс на железнодорожном транспорте: Тезисы докладов межвузовской научно практической конференции. -Самара: СамГАПС, 2003. -С. 13.
- Привалов, С.А. Об одном классе моделей квазипластического поведения составных систем/С.А. Привалов, Д.С. Привалов//Вестник МАНЭБ. -1999. -№3 (11). -С. 30-31.
- Rocard, Y. L'instabilite en mecanique. Automobiles. Avions. Ponts suspndus. Paris, 1954.
