Двухмассовый маятник

Автор: Попов И.П., Моисеев О.Ю., Абдулов С.В., Харин В.В.
Журнал: Международный журнал гуманитарных и естественных наук @intjournal
Рубрика: Физико-математические науки
Статья в выпуске: 9-1 (72), 2022 года.
Бесплатный доступ
Целью работы является создание осциллятора, не нуждающемся в обмене энергией с приводом. В предлагаемом осцилляторе свободные синусоидальные колебания сопровождаются трансформацией кинетической энергии инертного элемента в кинетическую же энергию другого инертного элемента. Элементы с другим характером реактивности в таком осцилляторе отсутствуют. Актуальность исследования определяется тем, что периодические процессы имеют повсеместное применение.
Кинетическая энергия, осциллятор, привод, реактивность, инертный элемент
Короткий адрес: https://sciup.org/170195565
IDR: 170195565 | DOI: 10.24412/2500-1000-2022-9-1-136-140
Dual-mass pendulum
The aim of the work is to create an oscillator that does not need energy exchange with the drive. In the proposed oscillator, free sinusoidal oscillations are accompanied by the transformation of the kinetic energy of an inert element into the kinetic energy of another inert element. Elements with a different nature of reactivity are absent in such an oscillator. The relevance of the study is determined by the fact that periodic processes are widely used.
Текст научной статьи Двухмассовый маятник
Для сообщения инертному телу периодических возвратно-поступательных движений требуется затрата соответствующим образом изменяющейся энергии. Это обусловлено тем, что тело обменивается энергией с приводом.
Целью работы является создание осциллятора, не нуждающемся в обмене энергией с приводом.
В классических осцилляторах свободные синусоидальные колебания сопровождаются обменом энергии между его элементами, имеющими противоположный характер реактивности [1-3].
В пружинном маятнике груз обменивается энергией с пружиной.
В электрическом колебательном контуре катушка индуктивности обменивается энергией с конденсатором.
Известны колебательные системы, в которых груз или пружина обмениваются энергией с катушкой индуктивности или кондесатором [4-6].
Все указанные колебательные системы по существу являются биреактивными , а именно: m-k, L-C, m-L, m-C, k-L, k-C .
Свободные синусоидальные колебания могут возникать при взаимной трансформации каких угодно физических видов энергии [7].
Это обстоятельство является побудительным мотивом создания осциллятора, в котором свободные синусоидальные колебания сопровождаются трансформацией кинетической энергии инертного элемента в кинетическую же энергию другого инертного элемента. Элементы с другим характером реактивности в таком осцилляторе отсутствуют.
Такой осциллятор по существу является монореактивным , а именно: m-m .
Актуальность исследования определяется тем, что периодические процессы имеют повсеместное применение [8-10].
Синтез осциллятора производится на основе трех предпосылок.
Первое . Осциллятор состоит из двух одинаковых по массе грузов.
Второе . Грузы совершают синусоидальные перемещения
Х1 = A sin (z + Z1), x2 = A sin (Z + Z2 ) .
Здесь X ], x2 - перемещения инертных элементов, A - амплитуда, Z — изменяющаяся фаза колебаний, Zi , Z2 — начальные фазы колебаний.
Третье . Суммарная энергия осциллятора со временем не изменяется Wx + W, = const .
Из второй и третьей предпосылок следует
m f dL Y 2 ( dt )
m
+
2
(dx2 )2
V dt 7
= const,
cos2 (Z + Zi) + cos2 (Z + Z2 ) = const.
Из второго выражения следует, что n
Z1 +Z 2 = ±^
Эта формула дает возможность определить конфигурацию монореактивного гармонического осциллятора, которая представлена на рисунке.
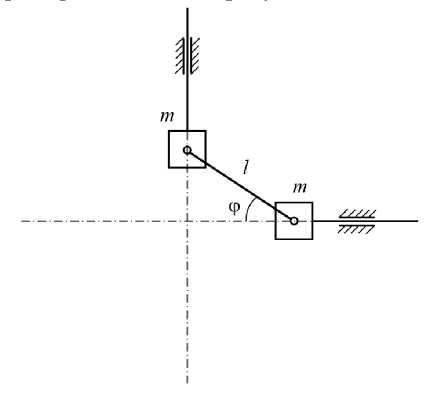
Рис. 1. Монореактивный гармонический осциллятор
Анализ осциллятора
Допущения . К инертным элементам внешние силы не приложены. Масса соединительного элемента равна нулю. Потери на трение отсутствуют.
В соответствии с рисунком перемещения инертных элементов имеют вид:
X = l cos ф,
x2 =lcos

Текущая фаза ф наилучшим образом подходит на роль обобщенной координаты.
Рассматриваемая механическая система обладает одной степенью свободы, поэтому, соответственно, уравнение Лагранжа второго рода принимает следующую форму:
d (дТ) дT
-^
dt (дф J дф
Так как активные силы равны нулю, то обобщенная сила тоже равна нулю Q = 0 .
Суммарная кинетическая энергия системы равна
m ( dx. Т 2 ( dt )
m ( dx, + — —-
2 ( dt
ml2 ml2 ml2
—— sin фф + —— cos фф = —— ф .
Отсюда следует
дт дт г. d (ат) 2„
— = 0, — = ml ф , — — = ml ф = 0.
дф дф dt (дф)
Это дифференциальное уравнение имеет элементарное решение
d ф
—— = C1, ф = C1t + C2.
dt
Постоянные интегрирования С 1 и С 2 находятся с учетом начальных условий ф (0) = ф о ,
d ф zm — (0) = ©o.
dt
Отсюда следует
C 1 =^ 0 , C 2 =ф о .
С учетом установленных величин перемещения инертных элементов (1) и (2) приобретают вид:
X = l cos («„ t + ф0),
П
x2 = l cos —
-toot -фо I.
Если исходное положение первого инертного элемента равно
X1(0) = X10 , то
x
cos фо = -10,
ф0 = arccos — = arcsin x20.
Если исходная скорость второго инертного элемента равна
dx
-
-72 (0) = v 20 , dt
то
ltoo cos (too0 + Фо ) = v20 , v20 v10
—--—--
x 10 x 20
С учетом полученных выражений перемещения инертных элементов и их скорости можно записать в виде:
lvx
± cos — t + arccos — , xl
П V ,A
X. — l cos — + —101
^-
2
x 20
x
arcsin^° ,
v
v — l —10-sin x20
—t + arcsin — , 720 l у
vx
cos ^° t - arccos^0- .
v 2 — lv 20 x 10
Заключение. В монореактивном ( m-m ) гармоническом осцилляторе инертные элементы могут совершать свободные синусоидальные колебания, которые сопровождаются трансформацией кинетической энергии инертного элемента в кинетическую же энергию другого инертного элемента.
В положении, при котором ф — 0 энер- гия первого инертного элемента равна нулю. При этом энергия второго элемента имеет максимальное значение. В следующий момент времени первый элемент приобретает ускорение за счет кинетической энергии второго элемента, скорость которого начинает уменьшаться.
В соответствии с выражениями (3) – (8) в монореактивном ( m-m ) гармоническом осцилляторе могут возникать свободные гармонические колебания любой заданной частоты, которая определяется исключительно начальными условиями.
Список литературы Двухмассовый маятник
- Попов И.П. Реактансы и сассептансы механических систем // Вестник Томского государственного университета. Математика и механика. - 2021. - №70. - С. 64-75.
- Попов И.П. Символическое представление вынужденных колебаний разветвленных механических систем // Вестник Томского государственного университета. Математика и механика. - 2021. - № 72. - С. 118-130.
- Попов И.П. Антирезонанс - резонанс скоростей // Мехатроника, автоматизация, управление. - 2019. - Т 20. - № 6. - С. 362-366.
- Попов И.П. Инертно-индуктивный осциллятор // Вестник Курганского государственного университета. Технические науки. - Вып. 8. - 2013. - № 2 (29). - С. 80-81.
- Попов И.П., Парышев Д.Н., Ильтяков А.В., Моисеев О.Ю., Мосин А.А., Харин В.В. Спонтанные емкостно-инертные колебания в системах железнодорожной автоматики и телемеханики // Транспорт Урала. - 2019. - №2 (61). - С. 45-48.
- Попов И.П. Спонтанные упруго-емкостные колебания в системах автоматики // Вестник Морского государственного университета им. адмирала Г.И. Невельского. Серия: Автоматическое управление, математическое моделирование и информационные технологии. - 2017. - Вып. 78. - С. 93-97.
- Попов И.П. Электромагнитное устройство для ориентирования космических аппаратов // Космические аппараты и технологии. - 2022. - Т. 6. - № 2 (40). - С. 119-122.
- Попов И.П. Применение символического (комплексного) метода для исследования околорезонансных явлений // Проблемы машиностроения и автоматизации. - 2020. - № 4. - С. 145-153.
- Попов И.П. Источники гармонических силы и скорости в мехатронных автоматических системах // Мехатроника, автоматизация, управление. 2021. - Т. 22. - № 4. - С. 208-216.
- Попов И.П. О резонансе и антирезонансе // Проблемы машиностроения и автоматизации. - 2019. - №4. - С. 45-48.
