Двухсредные беспилотные летательные аппараты

Автор: Полянин К.С.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 1 (19), 2017 года.
Бесплатный доступ
В статье рассматриваются последние изобретения в области конструирования двухсредных летательных аппаратов, способных, перемещаясь в воздушной среде, переходить в водную среду и обратно. Детально рассматриваются четыре аппарата, прошедших основные испытания и представленных мировому сообществу. Делается вывод о важности изобретения аппаратов, способных функционировать в двух средах.
Летательный аппарат, воздух, вода, беспилотный аппарат, разведка, армия, спасатели, подводное плавание, электромотор, винт
Короткий адрес: https://sciup.org/140270143
IDR: 140270143
Aircrafts that can work in two environments
The article deals with the latest inventions in the field of construction of the aircrafts which capable of moving in the air, plunge into the aquatic go backward. We concentrate our attention on the four apparatus that passed basic tests and has been presented to the community. At the end we made a conclusion about the importance of the invention of apparatus that are able to work in the sea and in the air.
Текст научной статьи Двухсредные беспилотные летательные аппараты
Следует отметить, что изобретение двухсредных беспилотных аппаратов является огромным шагом вперед в развитии таких наук, как информатика, теория управления, физика и многих других. Первые проекты управляемых беспилотных аппаратов существовали еще в конце 1800-х годов. Первым таким проектом являются радиоуправляемые воздушные шары, которые использовала Австрийская армия для бомбардировки Венеции. Официальной датой рождения радиоуправляемых беспилотных аппаратов является сентябрь 1924 года, когда гидросамолет Curtiss F-5L совершил первый целиком радиоуправляемые полёт, включавший взлёт, маневрирование и посадку на воду. В дальнейшем количество и сложность задач, ставившихся перед учеными, работавшими над развитием такого вида техники, лишь увеличивались. В настоящее время беспилотные аппараты используются во многих отраслях деятельности человека, таких, как армия, метеорология, борьба со стихийными бедствиями и др.
В сентябре 2015 года на конференции IROS 2015 группа ученых из Гарвардского университета представила робота, способного передвигаться в двух средах, а именно, летать в воздухе и плавать под водой. Результатом их работы является создание робота-пчелы весом всего сто миллиграммов.
Передвижение в воздухе осуществляется за счет махов крыльями с частотой 120 герц. В ходе разработок способов передвижения робота в воде было установлено, что передвижения возможно путем совершения таких же движений, как и в полете, но с более низкой частотой. Позднее была установлена наиболее оптимальная частота махов – 9 герц. Следует отметить, что при этом пчела остается полностью управляемой и способна передвигаться в любом направлении.
Предполагается, что в будущем такие роботы могут быть использованы спасателями для ликвидации последствий стихийных бедствий или военными для ведения разведки. Фото робота, сделанное во время испытаний, представлено ниже на рисунке.

Рисунок 1 – робот-пчела во время испытаний.
В октябре 2016 года команда ученых ST Engineering представила на выставке Singapore Airshow 2016 (рисунок 2)беспилотный летательный аппарат самолетного типа UHV (Unmanned Hybrid Vehicle, беспилотный гибридный аппарат). Существенным отличием от робота-пчелы является способность аппарата садиться на воду и передвигаться по поверхности.
UHV приводится в движение электромотором и имеет три винта (рисунок 3): один воздушный винт и два для подводного плавания. Для движения летательного аппарата над водной поверхностью и под водой используются лишь гребные винты, а лопасти воздушного винта складываются при посадке на водную поверхность. Во время полета в воздушной среде аппарат способен развивать скорость до 83 км/ч, но движение с такой скоростью может продолжаться лишь 15 минут. Под водой UHV может двигаться со скоростью около 5-6 км/ч в течение трёх часов.
Вероятно, в будущем такой гибридный аппарат будет применяться спасателями для разведки и борьбы с различного рода чрезвычайными ситуациями. UHV может использоваться и для военной разведки, или поиска подводных мин и других объектов. Для этих целей аппарат оснащён блоком видеонаблюдения и сонаром1.

Рисунок 2 – UHV на выставке Singapore Airshow 2016

Рисунок 3 – винты электромотора UHV.
12 ноября 2016 года в США прошли испытания летательного аппарата, получившего название GTQ-Cormorant, способного погружаться под воду и взлетать с поверхности воды.
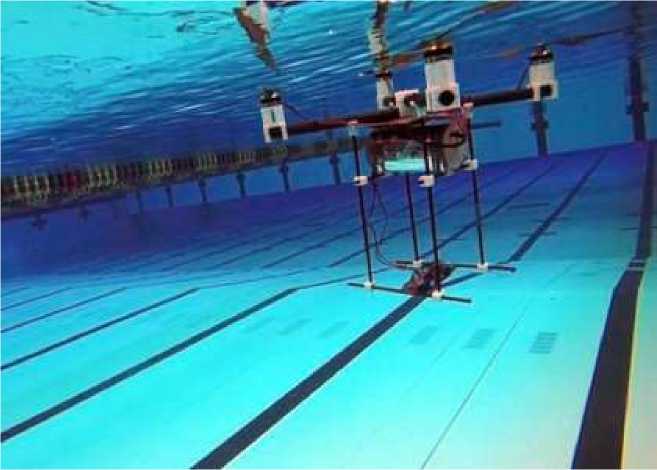
Рисунок 3 – GTQ-Cormorant во время испытаний механизма регулировки плавучести.
GTQ-Cormorant – первая модель БПЛА2, оснащённая механизмом регулировки плавучести. С его помощью аппарат может погружаться в воду на заданную глубину, а также подниматься на поверхность и взлетать. Разработку GTQ-Cormorant финансирует Управление военноморских исследований ВМС США.
Исследователи из Имперского колледжа Лондона разработали беспилотный летательный аппарат, способный нырять в воду для забора проб.
Преимущество нового аппарата заключается в том, что он не расходует энергию аккумулятора во время взлета из-под воды. На аппарат, получивший название AquaMAV (рисунок 4), разработчики установили капсулу со сжатым углекислым газом. Находясь под водой, аппарат перед взлетом располагается носом к поверхности, а затем открывает капсулу. Получившаяся реактивная струя и выбрасывает аппарат из воды.
Масса AquaMAV составляет всего 200 граммов. Аппарат способен в воздухе развивать скорость до 48 километров в час, а дальность его полета составляет пять километров.

Рисунок 4 –AquaMAV после прохождения испытаний.
В заключение всего вышесказанного необходимо отметить, что робот-пчела является наиболее перспективной разработкой, поскольку обладает возможностью не только нырять в воду, но и передвигаться под водой, хотя, важно учитывать ее весьма небольшой размер, который в различных ситуациях может являться как плюсом, так и минусом. Нельзя не заметить и такую разработку, как AquaMAV. Довольно большим плюсом этого аппарата является наличие камеры для забора проб воды, что может существенно помочь различным службам или ученым, занимающимся наблюдением за уровнем загрязнения воды.
Список литературы Двухсредные беспилотные летательные аппараты
- Сычёв В. Британцы научили беспилотный самолет нырять: // [Электронный ресурс].2017. URL: https://nplus1.ru/news/2017/01/04/dive (дата обращения 14.01.2017).
- Ackerman E. Robot with tummy full of microbes can swim in dirty water forever: // [Электронный ресурс].2015. URL: http://spectrum.ieee.org/automaton/robotics/robotics-hardware/rowbot-energetically-autonomous-artificial-organism (дата обращения 14.01.2017).
- Беспилотник для двух стихий :// [Электронный ресурс] // Warspot 2016. URL: http://warspot.ru/5371-bespilotnik-dlya-dvuh-stihiy (дата обращения 14.01.2017).
- Квадрокоптер научился взлетать из-под воды : //[Электронный ресурс] // Warspot 2016. URL: http://warspot.ru/4454-kvadrokopter-nauchilsya-vzletat-iz-pod-vody (дата обращения 14.01.2017)
- С. Фадеев. Словарь сокращений современного русского языка. - С.-Пб.: Политехника, 1997.
- Научно-технический энциклопедический словарь // [Электронный ресурс] URL: http://dic.academic.ru/contents.nsf/ntes/ (дата обращения 12.01.2017).
