Единое информационное обеспечение безредукторной электромехатроники

Автор: Смирнов Юрий Сергеевич, Юрасова Екатерина Валерьевна, Никитин Иван Сергеевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 4 т.14, 2014 года.
Бесплатный доступ
Рассмотрены преимущества безредукторной электромехатроники в ответственных применениях. Отмечено повышение качества движения для большинства технологических процессов при реализации приведенных временных диаграмм составляющих перемещения. Показано, что повышение эффективности безредукторных электромехатронных преобразователей (ЭМТП) на основе бесконтактных электромашин с постоянными магнитами (БЭПМ) требует формирования единого информационного обеспечения (ЕИО) процесса конвертации электроэнергии и информации в функциональное движение рабочего механизма (РМ). Обоснован выбор первичного измерительного преобразователя (ПИП), в качестве которого используются кинестетические синусно-косинусные сенсоры (СКС) или генераторные синусно-косинусные магнитные энкодеры (СКМЭ), обладающие свойствами хронотопа.
Единое информационное обеспечение, безредукторная электромехатроника, элек тромехатронные преобразователи, рабочий механизм, первичный измерительный преобразователь, синусно-косинусные сенсоры, синусно-косинусные магнитные энкодеры, бесконтактные электромашины с постоянными магнитами
Короткий адрес: https://sciup.org/147158290
IDR: 147158290 | УДК: 621.856.8
Common dateware of the gearless electromehatronic
The paper considers benefits of the gearless electromechatronic in the critical applications. We noted improvement of movement quality for most technological processes at the implementation of timing diagrams of displacement components. It is shown that the increase of the efficiency gearless electromechatronic converters based contactless electric machine with the permanent magnets requires forming of a common dateware of the process of converting electric power and information into the functional movement of the working mechanism. Choice of sensor is explained. As a sensor we used kinesthetic sine-cosine sensor or generator sine-cosine magnetic encoders having properties of a chronotope.
Текст научной статьи Единое информационное обеспечение безредукторной электромехатроники
Преимущества безредукторной электромехатроники
До появления БЭПМ гидравлика и пневматика были эффективными средствами промежуточного преобразования электроэнергии в механическое движение. Однако их недостатки: необходимость дополнительных энергозатрат на формирование повышенного давления энергоносителя, наличие сложной электронной аппаратуры сопряжения, возможность утечек энергоносителя, отрицательно влияющих на экологию – снижают их конкурентоспособность в сравнении с ЭМТП на основе БЭПМ.
Поэтому современная прикладная мехатрони-ка в большинстве случаев базируется на использовании электромеханики, которая наиболее эффективна для выработки движущихся сил путем преобразования электрической энергии в механическую безредукторным ЭМТП.
Следует учитывать следующие существенные преимущества безредукторной электромехатрони-ки в ответственных применениях:
-
• отсутствие редуктора обуславливает высокую надежность;
-
• единое информационное обеспечение;
-
• повышенная плавность движения, возможность длительного сканирования и скачкообразные шаговые перемещения [1];
-
• безопасность работы персонала и практическое отсутствие шума за счет применения современных технологий и материалов;
-
• наличие радиационностойких вариантов ЭМТП [2].
Показательны в этом отношении весьма ответственные устройства – скоростные лифты высотных зданий. Безредукторная электромехатро-ника уже начала задавать новую тенденцию в лиф-тостроении. Концепция безредукторных лифтов ставится на вооружение ведущими мировыми производителями подъемного оборудования. Возможности управления БЭПМ позволяют экономично использовать безредукторную технологию в лифтах грузоподъемностью от 1000 до 2000 кг на скоростях от 1,6 до 3,0 м∙с–1 и высотой подъема до 180 м. Новые ЭМТП лифтов компактны, просты в обслуживании и энергоэффективны [1].
Важной, с точки зрения энергоэффективности, является способность рекуперации энергии, которая возникает в БЭПМ при работе в генераторном режиме, когда РМ движется благодаря инерции. Это имеет место при движении автотранспорта под уклон и опускании лифта. Благодаря этому даже в случае ограниченного электроснабжения можно установить более эффективные лифты, чем при использовании традиционной редукторной технологии. Надежность безредуктор-ной электромехатроники достигается путем использования высококачественных инновационных материалов и соблюдения жестких производственных допусков при изготовлении.
Конструктивно БЭПМ выполняются в различных вариантах, обычно имеющих полый ротор (рис. 1). При встраиваемом варианте БЭПМ поставляется в виде двух узлов: ротора и статора, имеющих форму колец (рис. 1, а). Для ряда применений целесообразным становится использование корпусной конструкции электромеханической компоненты (ЭМК) с размещением на ней микроэлектронной компоненты (МЭК) (рис. 1, б). При использовании ЕИО особый интерес представляет агрегатирование в одном корпусе БЭПМ, СКС и зажимной муфты для сопряжения с РМ (рис. 1, в).
Повышение показателей функционального движения РМ
Одним из существенных достижений современной мехатроники стало улучшение показателей функционального движения РМ. В работах [3, 4]

а)
б)
в)
Рис. 1. Конструктивные варианты БЭПМ
показано, что наиболее эффективным для большинства технологических процессов является реализация временных диаграмм составляющих перемещения, представленных на рис. 2: величины θ( t ) (рис. 2, а), скорости Ω( t ) (рис. 2, б), ускорения ε( t ) (рис. 2, в) и рывка ρ( t ) (рис. 2, г).
Это, в свою очередь, потребовало совершенствования традиционного информационного обеспечения в части формирования не только составляющих величины θ, но и составляющих скорости Ω и ускорения ε. Особую роль составляющая ускорения ε играет при оценивании плавности движения и принятия решения об изменении составляющей скорости Ω на основе когнитивных технологий (КТ) путем выработки команд, формирующих выбор алгоритма и способа управления БЭПМ или форсировки посредством рывка ρ в самоорганизующемся ЭМТП. Наличие интеллектуальных возможностей ЭМТП позволяет достичь синергетического эффекта в части повышения энергоэффективности, надежности, быстродействия и точности.
Реализация движения в соответствии с приведенными зависимостями составляющих перемещения оказывается предпочтительной не только в обрабатывающей промышленности, где она повышает качество продукции, но и на транспорте, где она снижает износ механических узлов и требования к прочности РМ, которая связана с его размерами и весом. Их рост ухудшает энергоэффективность и динамику ЭМТП за счет увеличе- ния момента инерции РМ, непосредственно связанного с ротором высокомоментного БЭПМ. Электромеханическая постоянная агрегата БЭПМ-РМ увеличивается, что приводит к снижению устойчивости в динамике. Для обеспечения устойчивости необходима коррекция динамики обратными связями, осуществляющими в соответствии с управляющими технологиями подчиненное или модальное регулирование в прямом контуре ЭМТП. При формировании обратных связей используются аналоговые или цифровые эквиваленты составляющих перемещения [5].
Повышение энергоэффективности и функциональных возможностей безредукторного ЭМТП делает его экономически привлекательным. Поэтому дальнейшее развитие электромехатроники будет связано с исключением механических передач и интеграцией преобразователей энергии с РМ. Отсутствие редуктора позволяет не только расширить функциональные возможности ЭМТП, но и снизить номенклатуру выпускаемых модулей при одновременном увеличении их серийности, снижает прежде всего металло- и трудоемкость производства ЭМК, уменьшает ее износ, шум при работе и упрощает обслуживание.
Введение электромеханических устройств, а затем и локальных систем управления непосредственно в конструкцию РМ существенно упрощает и повышает их функциональные возможности и технические характеристики. Основное преимущество безредукторных ЭМТП – это возможность
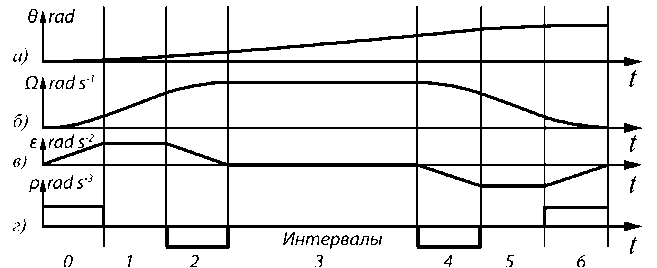
Рис. 2. Временные диаграммы составляющих перемещения: величины 0( t ) (a), скорости О( t ) (б), ускорения е( t ) (в), рывка р( t ) (г)
пов ышен и я точ н ости за с ч е т отсутствия люфтов , с уще с т в е н ного ум еньшения м е ртв ого х ода , пов ышен ия ре з она нсной ча стот ы, с ни ж е н ия м ом е нтов с ух ого тре ни я и д р у ги х н е жел ате л ь ных фа к торов , вносимых редуктором [ 1]. В ыс ока я эффе кт ивнос ть фун кц и они ров а ни я бе з ред укторн ого Э М ТП дос т игае тс я з а с че т у че та ко нс тр у кт ив ны х ос обе нносте й БЭПМ [6] и повышения требовани й к ин форма ц ионному обеспечению ЭМПТ [ 7], форм ируе м ому в ми кроэ л е ктрон ной ком поненте (МЭК) [5].
Особенности информационного обеспечения ЭМТП
Дл я м а с с ов ого в не дрени я бе з ре д у кторны х ЭМТП не обх од им о пре одол е ть ря д при нц ип иальных т р у дносте й, сде рж и в а ющи х инновационный проце с с. В пе рву ю оче ре дь это относ и тс я к не д оо ц е нке роли и нформ а цио н н ого об ес пе че н ия проце сс а пре обра з ов а ни я в и да эне ргии, не ра з рыв но свя за нн о г о с п р еоб р азо ва ния ми ф о р м ин ф о р мации. Тр ад ици он н ые вари а н т ы кин естети ч ес ких П ИП , применяемых в ЭМТП , п р едст ав ле н ы н а рис. 3.
Попытки полного перехода от аналоговых сенсоров (рис. 3, а) к кодовым (рис. 3, б) не дали желаемого эффекта из-за дороговизны изготовления последних и сложностей, связанных с передачей многоразрядных цифровых эквивалентов составляющих перемещения, требующих для получения скорости и ускорения операций цифрового дифференцирования в микроконтроллере (МК) величины перемещения с чрезвычайно высокими быстродействием и помехозащищенностью [7].
Применение инкрементальных датчиков (рис. 3, в) вписалось в концепцию использования последовательных интерфейсов. Этот вариант ПИП не решил проблем с динамикой и помехозащищенностью формирования составляющих скорости и ускорения. В качестве дополнительного недостатка в нем появилась реальная возможность потери информации в процессе передачи и отсутствие ее самовосстановления после пропадания питания.
Варианты «бессенсорного» информационного обеспечения [8] аккумулируют перечисленные недостатки кодовых и инкрементальных сенсоров. Получение информации о перемещении косвенными методами с применением моделей ЭМТП может быть осуществлено только приближенно, поскольку в большинстве случаев на современной микропроцессорной базе возможна реализация только упрощенных динамических моделей ЭМТП [5].
В ЭМТП с БЭПМ используется информационное обеспечение с ПИП на основе СКС. Его выходные сигналы оцифровываются вторичным микроэлектронным преобразователем (ВМП) «угол – параметр – код» (УПК), которые поставляются под заказ [9].
Варианты ЕИО на основе ПИП представлены в таблице.
Бесконтактные СКС (рис. 4) выполняются одноотсчетным встраиваемым (а) и корпусным (б), двухотсчетным корпусным (в).

а) б) в)
Рис. 3. Кинестетические первичные измерительные преобразователи

а)

б)
Рис. 4. Бесконтактные СКС: редуктосин (а), СКВТ (б) и БИФ (в)

в)
Варианты ЕИО на основе ПИП
|
№ п/п |
Тип и разновидность первичного измерительного преобразователя |
Составляющие перемещения на выходе ПИП |
Информационные технологии, необходимые для формирования остальных составляющих ЕИО |
|
1 |
КИНЕСТЕТИЧЕСКИЙ |
||
|
1.1 |
Инкрементальный датчик |
Числоимпульсный код N θ, маркер N 0 при θ = 0 |
Двойное дифференцирование N θ для получения ФΩ и Фε |
|
1.2 |
Кодовый датчик |
Позиционный код Грея N θГ или Баркера N θБ |
Формирование Фθ и двойное его дифференцирование для получения ФΩ и Фε последовательным дифференцированием двоичного кода Фθ |
|
1.3 |
Электромашинный синусно-косинусный сенсор |
Аналоговые квадратурные US θ и UC θ |
Формирование Фθ, Ф S θ, Ф C θ, ФΩ и Фε в составе циклического или следящего преобразователя УПК |
|
2 |
ГЕНЕРАТОРНЫЙ |
||
|
2.1 |
Круговые и секторные СКМЭ на эффекте Холла |
Параллельный двоичный код Ф θ , маркеры границ |
Двойное дифференцирование Ф θ для получения ФΩ и Фε, АЦП – для Ф S θ и Ф C θ |
|
2.2 |
Круговой СКМЭ на эффекте ГМР |
Параллельные двоичные коды Ф θ , Ф S θ , Ф C θ |
Двойное дифференцирование Ф θ для получения ФΩ и Фε, или формирование в составе следящего АЦП |
Информационное обеспечение ЭМТПна основе СКМЭ
Перспективным направлением дальнейшей электронизации ЭМК является использование в качестве ПИП генераторных синусно-косинусных магнитных энкодеров (СКМЭ), в которых используются следующие физические эффекты [10]:
-
• Холла, причиной которого является отклонение заряженных частиц, движущихся в магнитном поле под действием силы Лоренца.
-
• гигантского магнитного резонанса (ГМР), в основе которого лежит рассеивание электронов, зависящее от изменения направления магнитного поля.
Компания Austriamicrosystems производит СКМЭ (рис. 5) с вторичными микроэлектронными преобразователями серии AS5000 в вариантах с цилиндрическим однополюсным магнитом (рис. 5, а), с секционированной магнитной линейкой (рис. 5, б) и кольцевые многополюсные ПИП с горизонтальным (рис. 5, в) и вертикальным (рис. 5, г) размещением магнитов. Они изготавливаются из редкоземельных сплавов AlNiCo, SmCo и NeFeB, которые используются и при изготовлении ротора БЭПМ, что способствует дальнейшей электрони- зации ЭМК в части агрегатирования сенсора с электромашиной.
На рис. 5, д представлен СКМЭ типа TLE5012В компании Infineon Technologies на основе встроенных ГМР-элементов, соединенных в мостовую схему. Структура СКМЭ предусматривает возможность формирования сигнала скорости, а ортогональные составляющие оцифрованы.
Применение современных СКМЭ в прецизионных ЭМТП ограничивается повышенным, по сравнению с электромашинными СКС, уровнем суммарной погрешности как в статике, так и в динамике. Если первую удается снизить путем калибровки, то для коррекции второй необходимо формировать внешний тахометрический канал, что ведет к усложнению МЭК [11]. В качестве примера уместно привести следящий ВМП компании Analog Devices AD2S1210, обеспечивающий с электромашинными СКС цифровые выходы значения и скорости перемещения с разрешением до 15 бит. Необходимо учесть, что и этот вариант ВМП не формирует составляющую ускорения, необходимую для реализации самоорганизующегося преобразователя УПК.
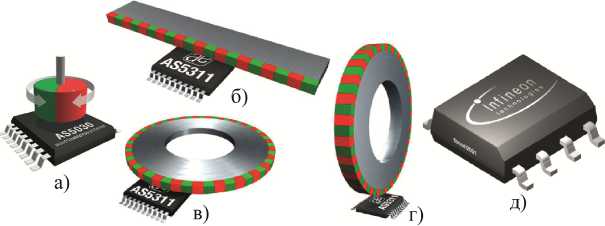
Рис. 5. Синусно-косинусные магнитные энкодеры
а)
Рис. 6. Самоорганизующийся преобразователь с переменной структурой (а) и его переходная характеристика (б)
б)
Самоорганизующийся преобразователь с переменной структурой
Мехатронный подход для реализации одноотсчетных прецизионных ЭМТП с СКМЭ, имеющими на выходе ПИП разрешение 15–16 бит, делает целесообразным использование интеллектуальных возможностей самоорганизующегося ВМП с переменной структурой и микроконтроллерной обработкой информации о перемещении на основе КТ.
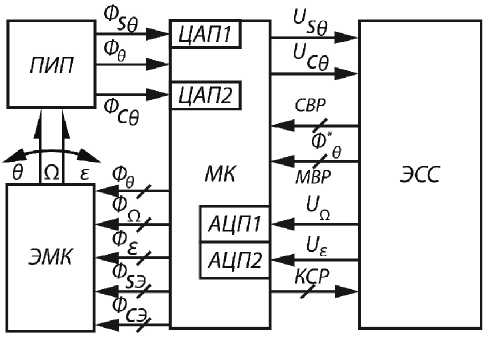
Блок-схема самоорганизующегося преобразователя представлена на рис. 6, а. Она содержит первичный измерительный преобразователь ПИП , сопряженный непосредственно с электромеханической компонентой ЭМК . Выходные сигналы ПИП в цифровой форме поступают в микроконтроллер МК . Ортогональные составляющие перемещения Ф S θ и Ф C θ декодируются соответственно ЦАП1 и ЦАП2 . После конвертации ортогональные аналоговые сигналы US θ и UC θ поступают на входы электронной следящей системы ЭСС . В ЭСС формируется цифровой эквивалент перемещения Ф*θ, временной сдвиг которого определяется динамической ЭСС , являющейся следящей системой с астатизмом второго порядка.
В процессе работы ЭСС на ее выходах формируются аналоговые эквиваленты составляющих скорости U Ω и ускорения U ε перемещения. Кодирование этих сигналов производится МК, с выхода которого цифровые эквиваленты скорости Ф Ω и ускорения Фε поступают в МК , где они используются для формирования соответствующих обратных связей по перемещению, его скорости и ускорению. В ЭМК поступают цифровые эквиваленты Ф S Э и Ф C Э , сформированные в МК для управления БЭПМ с любым числом пар полюсов [5].
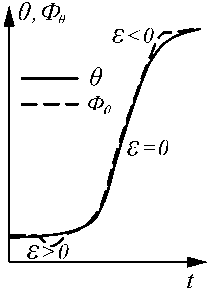
В установившемся режиме входного воздействия, когда его скорость Ω = const, а ускорение ε = 0 (рис. 6, б), динамическая ошибка преобразования отсутствует.
При изменении скорости входного воздействия возникает динамическая погрешность, связанная с инерционностью ЭСС . Погрешность преобразования в переходных режимах (см. рис. 6, б)
может быть достаточно быстро устранена [11] посредством замены режима слежения на циклический режим конвертации. Решение о смене режима конвертации принимается в МК посредством оперативного оценивания на основе КТ массива информации о составляющих перемещения Ф* θ , Ф θ , ФΩ и Фε. Из режима пропорционального управления ЭСС при больших рассогласованиях переводится в релейный режим. С точки зрения теории автоматического управления это аналогично введению логического нелинейного корректирующего устройства, что делает многокомпонентный преобразователь УПК самоорганизующимся в части самостоятельного изменения режима конвертации на основе оценивания массива текущих значений составляющих скорости Ω и ускорения ε перемещения. Команда смены режима КСР формируется в МК .
Заключение
Повышение эффективности преобразователей УПК при применении в ЭМТП связано с совершенствованием структурного, алгоритмического и информационного обеспечения процесса конвертации выходных сигналов ПИП в эквиваленты составляющих перемещения с целью формирования рекомендуемых для большинства технологических процессов временных диаграмм.
Существенным недостатком современных СКМЭ, ПИП которых обладает свойствами хронотопа, является ограниченное использование его функциональных возможностей в части формирования составляющих скорости и ускорения. Низки помехозащищенность и метрологические показатели формирования цифрового эквивалента перемещения разомкнутой структурой.
Выбор оптимального типа преобразователя для конкретного применения – трудная задача, усложняемая рядом противоречивых ограничений. Последние определяются возможностями, достоинствами и недостатками циклических и следящих преобразователей УПК. Мехатронный подход позволяет предложить компромиссный самооргани- зующийся вариант, обеспечивающий снижение динамической погрешности преобразования за счет уменьшения времени восстановления ВМП на три порядка в сравнении с аналогичным параметром традиционного следящего преобразователя УПК.
Список литературы Единое информационное обеспечение безредукторной электромехатроники
- Соловов, А.В. Безредукторные приводы. Вечное стремление к совершенству/А.В. Соловов//Оборудование. Разработки. Технологии. -2007. -№ 05 (5). -С. 63-64.
- Обеспечение радиационной стойкости электромехатронных преобразователей/Ю.С. Смирнов, Д.А. Кацай, Е.В. Юрасова, Т.А. Козина//Вестник ЮУрГУ. Серия «Энергетика». -2014. -Т. 14, № 2. -2014. -С. 79-87.
- Drury, B. The Control Techniques Drives and Controls: Handbook/B. Drury. -2nd Edition. -EMERSON. JET, 2009. -724 p.
- Балковой, А.П. Прецизионный электропривод с вентильными двигателями/А.П. Балковой, В.К. Цаценкин. -М.: ИД МЭИ, 2010. -328 с.
- Смирнов, Ю.С. Электромехатронные преобразователи/Ю.С. Смирнов; под ред. А.Л. Шестакова. -Челябинск: Изд. центр ЮУрГУ, 2013. -360 с.
- Бартос, Ф Технология встроенных магнитов в бесщеточных серводвигателях/Ф. Бартос//Control Engineering Россия. -2006. -Март.
- Бартос, Ф Высокомоментные бесколлекторные двигатели с постоянными магнитами/
- Бартос//Control Engineering Россия. -2007. -Октябрь.
- Импульсно-векторное управление с косвенным определением углового положения ротора/Ю.С. Усынин, Ю.С. Смирнов, Т.А. Козина и др.//Электротехника. -2013. -№ 10. -С. 36-41.
- Моментные электродвигатели и индукционные датчики угла для прецизионных электроприводов и цифровых безредукторных следящих систем: Каталог ГНЦ РФ ФГУП ЦНИИ «Электроприбор», 2002. -77 с.
- Сысоева, С. Разработка нового поколения датчиков магнитного поля/С. Сысоева//Компоненты и технологии. -2014. -№ 1. -С. 40-46.
- Специфика применения синусно-косинусных сенсоров/Ю.С. Смирнов, Е.В. Юрасова, Е.В. Встав¬ская, И.С. Никитин//Материалы конференции «Информационные технологии в управлении» (ИТУ-2014). -СПб.: ОАО «Концерн «ЦНИИ «Электроприбор», 2014. -С. 720-728.
