Enhancing Data Processing Methods to Improve UAV Positioning Accuracy

Author: Igor Zhukov, Bogdan Dolintse, Sergii Balakin
Journal: International Journal of Image, Graphics and Signal Processing @ijigsp
Article in issue: 3 vol.16, 2024.
Free access
UAVs play a crucial role in various applications, but their effective operation relies on precise and reliable positioning systems. Traditional positioning systems face challenges in delivering the required accuracy due to factors such as signal degradation, environmental interference, and sensor limitations. This study proposes the LeGNSS positioning subsystem, which integrates low Earth orbit (LEO) satellite network data with GPS and MEMS-based inertial systems, to enhance UAV positioning accuracy and reliability. The presented in this research LeGNSS system employs sophisticated algorithms for optimal data processing and filtering from various sources. Simulation results demonstrate a 9.02% improvement in positioning estimation accuracy compared to classic GPS/INS integration and a 26.4% improvement compared to the onboard GPS receiver. The integration of inertial and satellite positioning, corrective mechanisms, and optimized filtration has resulted in improved precision of trajectory computations, attenuation of positioning signal anomalies, and a significant decrease in INS inaccuracies. The proposed LeGNSS positioning system presents a solution for precise and reliable UAV positioning in a wide range of applications. By leveraging the unique advantages of LEO satellite networks and advanced data fusion techniques, this system pushes the boundaries of UAV positioning capabilities. The novel integration of multiple data sources and the use of adaptive error correction algorithms set a new standard for accuracy and robustness, paving the way for unprecedented capabilities in fields such as aerial surveying, precision agriculture, infrastructure monitoring, and emergency response. Analysing the impact of complex environmental factors on LeGNSS operation can provide insights into expanding the list of satellite systems or sensors to improve positioning accuracy, particularly in high-latitude regions. The findings of this study contribute to improving the accuracy, reliability, and resilience of UAV positioning systems, with applications in scientific polar research, geomatics data gathering, and other domains. The LeGNSS system has the potential to become a key feature for the next generation of autonomous aerial vehicles, unlocking efficiency, safety, and innovation across industries.
LeGNSS, INS, LEO satellites, UAV, multi-constellation positioning system, precise positioning, drone management
Short address: https://sciup.org/15019456
IDR: 15019456 | DOI: 10.5815/ijigsp.2024.03.08
Text of the scientific article Enhancing Data Processing Methods to Improve UAV Positioning Accuracy
In the modern era of warfare and surveillance, Unmanned Aerial Vehicles (UAVs) have emerged as pivotal assets on the battlefield and beyond, transforming operational strategies and redefining the paradigms of engagement. As these aerial systems ascend in prominence, so do the challenges associated with their effective deployment and management. Foremost among these challenges are the critical issues of detection, including evasion from sophisticated radar systems
[1], which can be based on micro-Doppler effect [2], often using microwave [3] millimetre wave radar [4], coherent-polarimetric [5-6] and other methods [7-8], including acoustic ones [9]. Such detection data can be used to countermeasures including radio-electronic warfare [10] that aim to disrupt UAV operations, for example, by influencing the navigation system. Additionally, the control and navigation of UAVs under varied environmental conditions and against active electronic jamming present complex obstacles that demand robust solutions.
Detection technologies are continually advancing, with radar systems now capable of identifying UAVs among a myriad of airborne objects, thereby necessitating innovative stealth technologies and tactics. Concurrently, UAVs face threats from radio-electronic warfare tactics that seek to impair their communication and navigation systems. These include jamming techniques [11] that disrupt GPS signals and other critical communication links, challenging the UAVs' ability to operate effectively in hostile environments.
This article considers these multifaceted challenges and the advanced technologies enabling effective positioning. These challenges can lead to decreased accuracy and reliability, which can have serious consequences for UAV operations [12]. To address these challenges, researchers and developers have been exploring new and innovative positioning technologies that can provide more accurate and reliable positioning for UAVs. These methods propose of data fusion from GPS, INS and LEO (low Earth orbit) satellites based positioning systems (StarLink, OneWeb, etc.), which use computer data processing algorithms to estimate the position and orientation of UAVs, and wireless sensor networks, which use a network of sensors to estimate the position of a UAV. Such approach [13] offers the potential to significantly improve the accuracy and reliability of UAV positioning systems, but they also present new challenges in terms of integration, calibration, and synchronization.
Innovating approaches to traditional positioning systems like GPS and INS [12], in particular, development of advanced sensor fusion algorithms to combine data from multiple sensors, such as GPS, INS, and LEO provides more accurate and reliable positioning. These approaches offer the potential to significantly improve the performance of traditional positioning systems [14], data security and consistency [15], but they also require careful consideration of issues such as cost, complexity, and power consumption.
The accuracy of positioning is critical for the effective operation of UAVs in various applications, and traditional positioning systems face significant challenges in delivering the required level of accuracy [16]. The integration of a robust inertial multi-satellite positioning system is a promising solution to address the challenges that traditional solutions cannot cope with. Such a system aims to improve the processing of redundant information by enabling correction and optimal filtering of measurement errors from three different sources of information, thereby increasing the accuracy and reliability of UAV positioning.
The LeGNSS positioning system integrates satellite network data [17-18] with GPS and marking a significant advancement in UAV positioning technology. This integration offers the potential to improve the accuracy and reliability of UAV positioning.
Currently, there are only limited research publications covering the scope and application of fusion of LEO-satellite data with traditional positioning systems. Therefore, the development of practical application and further data processing in positioning systems that use the latest approaches to positioning with technologies such as LEO satellites is a very perspective trend. The development and implementation of the LeGNSS positioning system are crucial for enhancing UAV positioning accuracy, reliability, and fault tolerance. By providing enhanced positioning accuracy, reliability, and fault tolerance, the LeGNSS positioning system can revolutionize UAV positioning technology, making it more efficient and safer for various applications.
The purpose of this article is to present the design, implementation, and evaluation of the LeGNSS positioning system for UAVs, demonstrating its potential to significantly improve UAV positioning capabilities.
2. Problem Statement
The evolution of UAV positioning technology has been accelerated by the growing demand for UAVs in various applications, such as commercial delivery, agricultural monitoring, military operations, and search and rescue missions. However, the fundamental requirement for effective UAV operation, precise and reliable positioning, faces significant challenges due to the limitations of existing positioning systems, such as GPS and INS [19]. Limitations of GPS: GPS, despite its global coverage and relatively high accuracy, has several limitations.
The primary challenge is signal degradation, which can result in significant errors in position estimation. Signals transmitted from satellites to receivers on UAVs can be affected by various sources of interference, including atmospheric conditions, urban canyons, and foliage. Moreover, GPS is susceptible to multipath errors, where signals reflect off surfaces before reaching the receiver, causing delays and inaccuracies in the calculated positions.
In addition to signal degradation and multipath errors, GPS is also vulnerable to intentional interference, such as jamming and spoofing, which can cause significant disruptions to UAV operations [20]. These challenges necessitate the development of more advanced and robust positioning systems that can overcome the limitations of GPS and provide accurate and reliable positioning for UAVs in various applications [21].
INS Limitations: Conversely, INS, which determines position using motion and rotational sensors, operates independently of external signals, thus avoiding the signal degradation issues that affect GPS. However, INS systems, particularly those utilizing micro-electro-mechanical systems (MEMS), are susceptible to cumulative errors. These errors stem from drift in inertial sensors over time. Lacking external reference points, the accuracy of INS diminishes rapidly, rendering it unreliable for prolonged positioning tasks.
Integration Challenges: Combining GPS and INS has been identified as a potential solution to mitigate the individual drawbacks of each system. Nonetheless, this integration presents complexities. The key challenge lies in effectively merging data from both systems to yield a more precise and dependable estimation of the UAV's position [22]. This process necessitates advanced filtering and correction techniques to handle the inherent noise and errors in the data from each system. Moreover, the integration must consider dynamic environmental factors and operational conditions that can impact the performance of the positioning systems [23].
Dynamic Environmental Influences: UAV operations are often subject to dynamic environmental conditions, such as varying wind speeds and directions, which can further complicate positioning. These factors can introduce additional errors in the positioning data, making it difficult to maintain the required level of accuracy for specific applications. Robust Positioning Subsystem: To address these challenges, a robust positioning system is required that can effectively integrate GPS and INS data, applying advanced correction and filtering techniques [24]. This system must enhance the accuracy and reliability of UAV positioning and be resilient to environmental influences and flight dynamics.
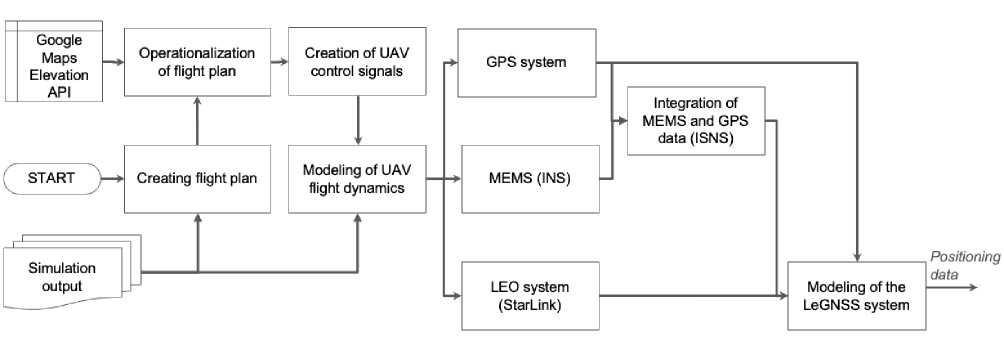
Fig. 1. Algorithm for LeGNSS integrated multilayer positioning system in Matlab.
Research Gap: Current research in UAV positioning has predominantly concentrated on enhancing GPS or INS independently or on the basic integration of these systems. There is a lack of comprehensive solutions that tackle the intricate interplay of errors and environmental factors affecting integrated UAV positioning systems. The LeGNSS positioning system aims to bridge this gap by offering an advanced solution that integrates LEO-satellites information with both classical positioning onboard systems (GPS and INS) and enhances this integration with correction and optimal filtering techniques.
SpaceX-inspired satellite innovation promises a new era for positioning systems, offering unprecedented accuracy and reliability. The proposed LeGNSS system addresses UAV positioning challenges by integrating information from LEO satellites and GPS and INS data, enhancing accuracy, reliability, and fault tolerance. This research aims to provide a robust solution for UAV positioning, applicable to various applications.
3. Problem Solution
Satellite positioning is vital for precise location determination but faces challenges like signal interference and accuracy limitations. Threats like solar interference and system maintenance impact system reliability. The U.S. Air Force manages GPS but struggles with system upgrades and satellite acquisition. Despite challenges, satellite technology offers improved communication, positioning, security, and potential for space tourism, while facing issues like component supply, standards complexity, space debris, and environmental concerns [25]. Solar interference, system maintenance, man-made radio interference, intentional jamming, and system under attack are some of the threats to satellite systems. Solar activity, such as solar storms, can disrupt signal reception, and system designers must plan for these disruptions.
The strategy proposed to address the complexities encountered in UAV positioning systems involves the creation of a sophisticated LeGNSS positioning subsystem. This system is designed to incorporate advanced correction mechanisms and optimal filtering techniques to refine the processing of redundant information essential for achieving precise UAV positioning. At the core of this proposed solution is an intricate integration scheme that leverages the capabilities of the LeGNSS positioning subsystem. By integrating this system effectively, the aim is to elevate the accuracy and reliability of UAV positioning systems to new levels, ensuring optimal performance in various scenarios.
To validate the proposed approach and demonstrate its real-world applicability, a case study was conducted using the recently launched StarLink LEO satellite constellation. The study aimed to assess the feasibility and performance of using LEO satellite signals for UAV positioning in a real-world scenario. In 2022, researchers first proposed the concept of utilizing LEO telecommunication satellites for positioning purposes [26]. Subsequently, in 2023, researchers discovered that by observing signals from eight LEO satellites over a 10-minute period, their information processing algorithms could achieve an unprecedented positioning accuracy for a stationary ground receiver, with a achieving a horizontal positioning error of 10 meters [27].
To evaluate the proposed model, a detailed simulation was conducted using Matlab to generate arrays of data representing various aspects of UAV positioning. The simulation encompassed positioning errors derived from satellite and inertial information sources, as well as the influence of external dynamic factors, such as wind, on the UAV's flight modeling. By simulating these aspects, the analysis aimed to provide a comprehensive understanding of the complexities and challenges associated with UAV positioning, and the effectiveness of the proposed solution in real-world scenarios.
Building upon these findings, the case study focused on integrating StarLink LEO satellite data into the LeGNSS positioning system. A UAV equipped with the LeGNSS hardware and software components was flown in an open field, and the positioning data from GPS, MEMS inertial sensors, and StarLink LEO satellites were collected simultaneously. The successful integration of StarLink satellite signals highlights the potential of the LeGNSS system to benefit from the rapidly expanding LEO satellite constellations and their global coverage. However, to fully harness the capabilities of LEO satellites for UAV positioning, further research is needed to refine the error modeling techniques and adapt the data fusion algorithms to the specific characteristics of LEO satellite signals. This approach allowed for a thorough examination of the proposed LeGNSS positioning subsystem, providing insights into its potential to enhance the accuracy and reliability of UAV positioning. (Fig. 1).
Logical workflow of LeGNSS positioning system can be describe in next following key steps:
-
- data acquisition: raw data are collected from GPS, LEO satellite networks (e.g., StarLink, OneWeb), and MEMS-based inertial sensors (accelerometers, gyroscopes, and magnetometers) via the UAV's onboard sensors and receivers;
-
- data preprocessing: raw data are preprocessed to remove outliers, filter noise, and synchronize the measurements from different sources. This step is crucial for ensuring the accuracy of the subsequent data fusion process, with time synchronization playing a critical role;
-
- data fusion: preprocessed data from GPS, LEO satellites, and inertial sensors are fused using an adaptive Kalman filter-based algorithm. This algorithm estimates the UAV's position, velocity, and attitude by combining the measurements from the different sensors and dynamically adjusting the filter gains based on estimated error covariances;
-
- error correction: multi-stage error correction mechanisms are applied to the fused data to mitigate the impact of signal degradation, multipath effects, and sensor drift. These mechanisms include bias estimation, outlier detection, and smoothing techniques;
-
- position estimation: corrected and fused data are used to estimate the UAV's final position, velocity, and attitude. The estimated states are then provided to the UAV's control systems for further processing and decision-making;
-
- performance evaluation: accuracy and reliability of the LeGNSS positioning system are continuously monitored and evaluated using various performance metrics, such as root-mean-square error (RMSE), maximum error, and confidence intervals.
The algorithm is specifically crafted to emulate the operational dynamics of the LeGNSS integrated positioning system for Unmanned Aerial Vehicles (UAVs). It executes a series of procedural steps to replicate UAV flight dynamics by incorporating diverse positioning models like MEMS, GPS, LEO, and LeGNSS systems.
In the simulation of UAV flight dynamics, meticulous attention must be given to aerodynamic forces, variations in air density, and external influences like wind and turbulence that exert influence on the vehicle's motion. These considerations are fundamental in ensuring the accuracy and reliability of the simulation, particularly in the context of UAV flight dynamics. Aerodynamic drag during flight simulated via equation (1):
Fdrag = --2pCdAv2, (1)
where ρ is the density of the air, C d is the drag coefficient, A is the cross-sectional area, and v is the velocity.
The given equation models the aerodynamic drag force experienced by a UAV during flight, which is a crucial factor in accurately simulating its motion in various flight conditions. By incorporating this equation into the simulation, we can account for the resistance of the air and generate more precise predictions of the UAV's behaviour. This, in turn, enables the determination of optimal control commands that effectively guide the UAV towards the specified waypoints in its flight routes.
The utilization of Matlab tools for automated compilation and visualization of flight routes enables detailed planning and evaluation of UAV trajectories. The UAV flight simulation model integrates and processes data from multiple positioning systems, providing a thorough analysis of onboard system behaviour under various conditions. By employing pseudo-real data during the simulation of the integrated positioning system, a comprehensive 3D flight model was developed, reflecting a realistic flight scenario for UAVs. This approach allows for a more accurate representation of UAV movements during flight, aiding in the development and optimization of control algorithms and positioning.
Simulation of flight dynamics requires using equations of Newton and Euler (2-3), which allows to reproduce the dynamics of UAV movement.
L = = - д, (2)
т ш = Г1(Т-шх(1 ш)), (3)
where r is the acceleration of the UAV centre of mass, F is the moment of force, m is the mass, g is the acceleration of gravity, ω is the angular velocity, T is the moment of forces, and I is the inertia tensor.
During simulation, gyroscope drift and accelerometer errors exhibit exponential characteristics with notable correlation periods, which can be mathematically described by the following set of differential equations (4-5).
ш = Г\Т -ых(1 ш)), (4)
Да = - ^Aa + ^q a , (5)
Ta Ta where is q - random component (white noise), Ta, Tw - correlation time coefficient.
The error model (6) simulates random and systematic errors for sensors like accelerometers, gyroscopes, and magnetometers, accounting for errors from temperature changes, mechanical stresses and electromagnetic interference.
^MEMS = ^bias^t) + ^scale + ^ortho + ^drift^t) + ^noise^^), where bias represents the time-dependent shift error, scale indicates the sensor data scale deviation, ortho signifies the non-orthogonality error of sensor axes, drift denotes the time-dependent rate of sensor drift, noise refers to unpredictable and uncorrectable measurement fluctuations, and (t) represents a time-dependent function (rate of change).
The modeling and research of the integrated LeGNSS with optimal filtering was performed in a discrete form in the Matlab (R2024a) environment. To construct the flight altitude plan along the route, the Google Maps API and algorithm for operationalizing the flight plan over the Earth surface. For a quantitative assessment of the accuracy of the simulation result, multiple statistical evaluations were carried out to obtain the variance of the error estimate of the integrated LeGNSS system and compare the obtained data with other subsystems. At this stage of the research, we are focusing exclusively on the software solution. Hardware requirements and potential obstacles will be considered in future studies.
Figs. 2-4 show a comparative analysis of the errors of the subsystems' estimation of the UAV position values for the main competing onboard positioning systems INS/GPS and LeGNSS. The graphs show that the inclusion of the optimal filtering and positional correction algorithm in the model of the integrated system allowed to reduce the overall system error and the noise level of the obtained positioning estimates for both competing systems.
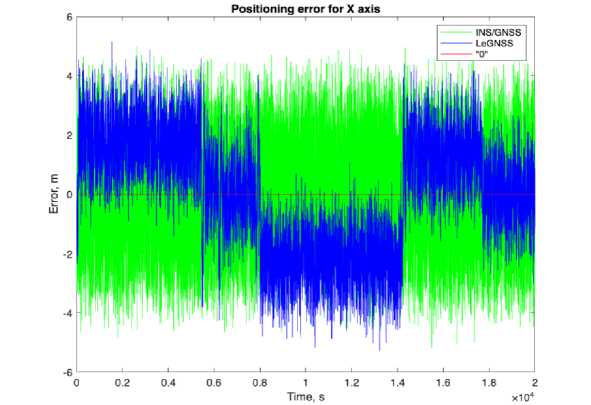
Fig. 2. Results of the quadrotor guidance simulation of positioning error on X-axis: a) INS/GPS positioning system (green), b) LeGNSS positioning system (blue), c) zero line for error estimation (red).
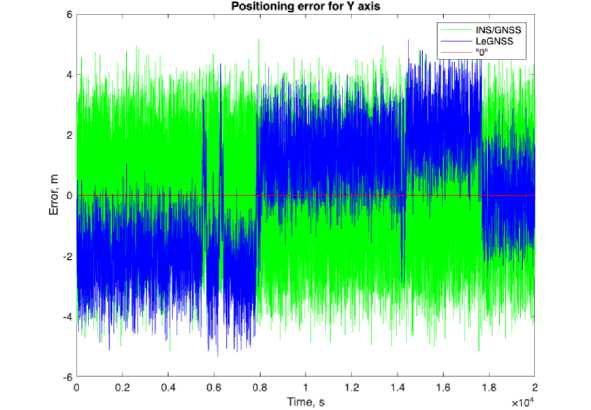
Fig. 3. Results of the quadrotor guidance simulation of positioning error on Y-axis: a) INS/GPS positioning system (green), b) LeGNSS positioning system (blue), c) zero line for error estimation (red).
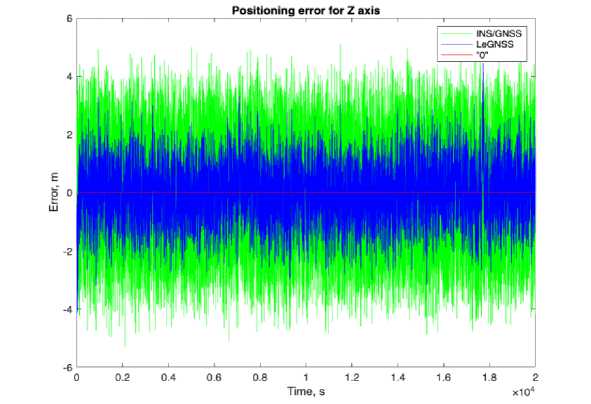
Fig. 4. Results of the quadrotor guidance simulation of positioning error on Z-axis: a) INS/GPS positioning system (green), b) LeGNSS positioning system (blue), c) zero line for error estimation (red).
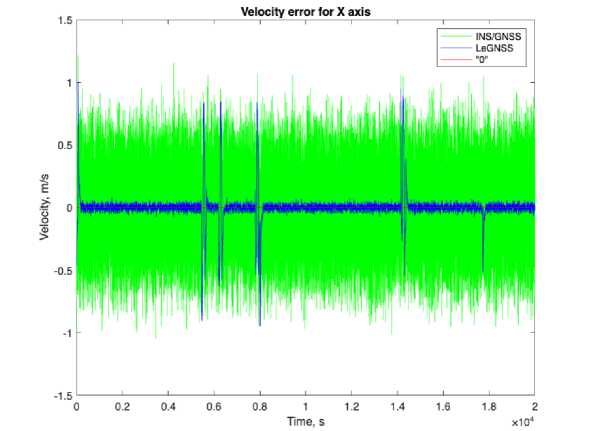
Fig. 5. Results of the quadrotor guidance simulation of velocity error on X-axis: a) INS/GPS positioning system (green), b) LeGNSS positioning system (blue), c) zero line for error estimation (red).
хЮ4
Time, s
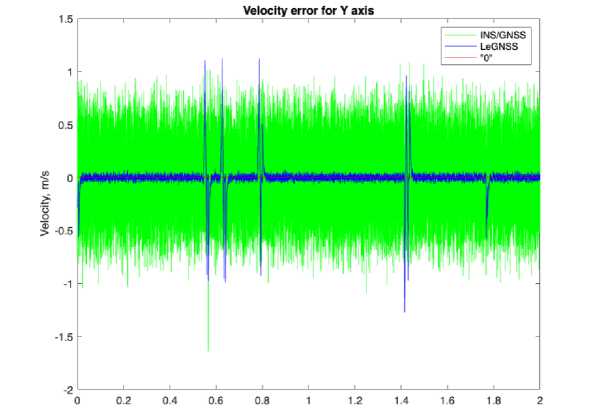
Fig. 6. Results of the quadrotor guidance simulation of velocity error on Y-axis: a) INS/GPS positioning system (green), b) LeGNSS positioning system (blue), c) zero line for error estimation (red).
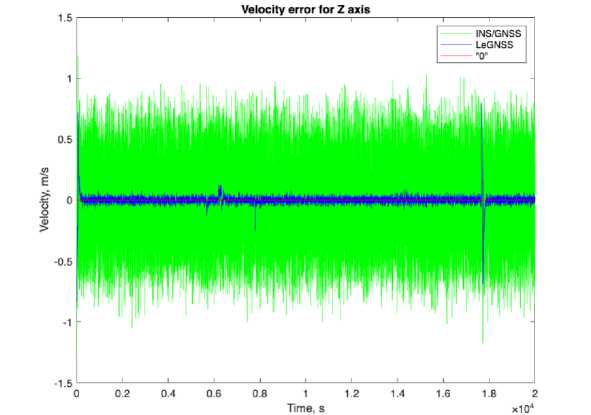
Fig. 7. Results of the quadrotor guidance simulation of velocity error on Z-axis: a) INS/GPS positioning system (green), b) LeGNSS positioning system (blue), c) zero line for error estimation (red)
At the beginning of the simulation period, the error has a slight spike, but does not exceed the permissible limits and remains relatively low throughout the simulation period, which indicates a reliable initialization of the system. Transient error peaks can be observed throughout the entire period. These peaks can be explained by a significant change in flight dynamics during the passage of difficult route stages, signal failures, or temporary INS drifts. Despite the random peaks, the general trend of the error curve is stable, which indicates the stable operation of the proposed LeGNSS system. Figs. 5-7 demonstrate a comparative analysis of the errors of the subsystems' estimation of the UAV velocity values of errors using a similar approach for each of the X, Y, Z axes. However, the additional input of information from LEO satellites significantly improved the accuracy and stability of data processing in the system and, as a result, the best results of information processing in dynamic operating conditions.
The results of the LeGNSS system modeling demonstrate its exceptional performance in maintaining accurate and reliable positioning even in the presence of temporary GPS signal loss. The average positioning error remains within 33.5 meters, a significant improvement compared to standalone GPS or INS solutions. This is achieved through the intelligent integration of LEO satellite data, which provides an additional layer of redundancy and resilience. This enables the LeGNSS system to maintain a stable and accurate positioning solution even in challenging environments where GPS signals may be intermittently unavailable. The real-time processing capabilities of the system further enhance its practical applicability, allowing for seamless integration into UAV positioning systems and enabling reliable autonomous operations in various scenarios. The LeGNSS system's robustness and accuracy make it particularly suitable for applications such as precision agriculture, infrastructure inspection, and rescue missions, where positioning is critical.
The discrete simulation in the Matlab environment (R2024a) offers insights into the UAV positioning subsystem's operation. Multiple statistical evaluations were conducted to quantify the accuracy of the simulation results, comparing the variance of error estimation of the complex LeGNSS system with other systems (Fig. 8). These evaluations demonstrate the high quality of the LeGNSS error identification process and the reliability of the statistical modeling. To actually assess the level of improvement in the quality of positioning data processing in UAVs, it is necessary to calculate the root-mean-square (RMS) value of each subsystem. Since most satellite positioning systems have good accuracy only in two-dimensional space, and UAVs perform missions in three-dimensional space, it is necessary to calculate the three-dimensional RMS. The task of analysing the RMS of the system is not only to quantify the error values, but also to optimize the weighting factors, which minimizes the error values and increases the positioning accuracy by more efficiently using data from different satellite systems.
The optimized total 3D RMS error, derived from the weighting coefficients, becomes a key indicator for assessing the quality of the proposed models presented in Fig.8. It reflects the integrated effect of the errors of each of the coordinate axes, allowing to form a comprehensive picture of the accuracy of the received positioning information.
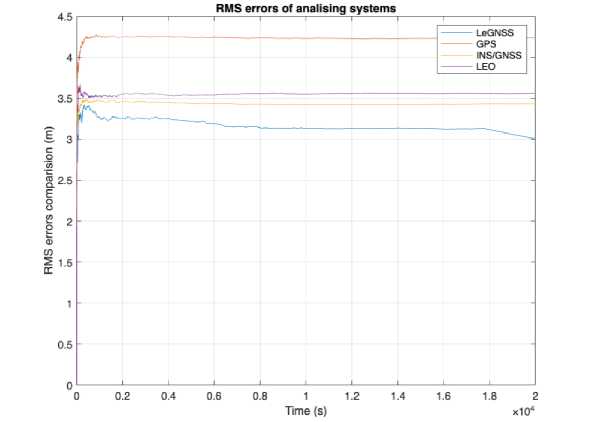
Fig. 8. Analysis of changes the RMS of the error estimates for each of the analysis sub-systems based on the modeling results.
To enhance the robustness and comprehension of the positioning system, we introduce an advanced multi-source positioning approach for UAVs that relies on real-time evaluation of redundant data. This method is general in algorithm specifically designed to accurately estimate Inertial Navigation System (INS) discrepancies, leveraging the principles of the Kalman filter. The core of the LeGNSS positioning system incorporates the Kalman filter, a crucial element in amalgamating data from the MEMS inertial positioning system, satellite positioning system, and LEO satellite network. The correction coefficients of the filter, obtained through the solution of the Riccati equation, are instrumental in updating the covariance matrix of estimation errors (Fig. 2). By efficiently assimilating new measurements, the Kalman filter continuously refines the system's state estimate and reduces uncertainty to minimize overall errors.
The incorporation of optimal filtering and positional correction algorithms within the complex system results in a significant reduction of overall error and noise levels in positioning estimates. The error exhibits a minor spike at the beginning of the simulation period, yet it remains within acceptable limits and remains relatively low throughout the entire simulation period, indicating a reliable system initialization. Transient peaks of error are observed periodically, which can be attributed to changes in flight dynamics during challenging mission phases, signal failures, or temporary INS drifts. However, the magnitude of these errors rapidly decreases following each peak.
The modeling of the proposed LeGNSS system illustrates the efficiency of processing real-time positioning information, with a stable overall trend of error curves despite some peaks. The positioning error in the proposed LeGNSS system is within 3 meters, as depicted in Fig. 3, indicating the regular operation of the system.
The calculation of absolute RMS values of positioning error estimation based on the simulation results reveals a 9.02% improvement in accuracy for the LeGNSS positioning system compared to the integrated INS/GPS of increased accuracy, and a 26.4% improvement compared to the onboard GPS receiver. This data demonstrates the superior performance of the proposed LeGNSS system in estimating positioning errors.
The results presented in this study highlight the exceptional efficiency of the complex LeGNSS subsystem, which is formed by integrating the LEO (Starlink) low-orbit satellite communication system, the GPS Global Satellite Positioning System (GPS), and the onboard MEMS measurement system. The LeGNSS system employs sophisticated algorithms for optimal data processing and filtering from various sources, thereby enhancing the accuracy of real-time UAV positioning and speed assessment.
However, it is important to note that the study assumes idealized conditions for receiving satellite signals, which may not always be reflective of real-world scenarios. Additionally, the error simulation of the MEMS system may not capture all the specifics of individual sensors' drifts and measurement biases. Due to the ongoing martial law in Ukraine, data collection has been challenging, including access to satellite signals, which may be subject to potential restrictions.
The proposed LeGNSS positioning system represents a significant advancement in UAV positioning technology, offering a reliable, continuous, and accurate positioning solution by integrating multiple data sources with advanced filtering and correction techniques. This system's efficiency not only addresses existing challenges in positioning but also opens up opportunities for improved safety, accuracy, and operational efficiency in various sectors employing UAVs.
At this stage of the research, we are focusing exclusively on the software solution of the LeGNSS system, without addressing hardware implementation issues. Hardware requirements and potential obstacles will be considered in future studies and developments.
The findings of this study can be applied in various sectors, including unmanned aircraft systems, to enhance safety, accuracy, and operational efficiency of existing systems.
4. Conclusion
By leveraging the unique advantages of LEO satellite networks and advanced data fusion techniques, this system pushes the boundaries of what is possible in UAV positioning. The novel integration of multiple data sources and the use of adaptive error correction algorithms set a new standard for accuracy and robustness, paving the way for unprecedented capabilities in fields such as aerial surveying, precision agriculture, infrastructure monitoring, and emergency response. As the demand for UAVs continues to grow across industries, the LeGNSS system has the potential to become a key enabler for the next generation of autonomous aerial vehicles, unlocking new possibilities for efficiency, safety, and innovation.
Overall, the proposed LeGNSS positioning system presents new way for precise and reliable UAV positioning in a wide range of applications. The proposed LeGNSS system differs from the already known systems in that it offers a solution for fusing INS, GPS and LEO satellites using correction mechanisms and optimal filtering, which resulted in increased accuracy of trajectory calculations, reduced positioning signal anomalies and reduced positioning errors.
The proposed positioning solution for UAVs which allows combining information from INS, GPS and LEO satellites, has shown good results with a 9.02% improvement in positioning estimation accuracy compared to classic GPS/INS integration and a 26.4% improvement compared to the onboard GPS receiver.
Results of this study can be used to improve the accuracy, reliability, and resilience of UAV positioning systems, particularly in the context of scientific polar research and geomatics data gathering systems. The findings can be applied to enhance the precision and robustness of GPS-based positioning systems, and to explore the potential of expanding the list of satellite systems or sensors to improve the accuracy of positioning information. The study also highlights the importance of resilient PNT solutions for civilian, military, and space operations, particularly in the context of unmanned and other systems. This can be particularly useful in high-latitude regions, where geostationary satellites used for data distribution may be located at low elevation angles above the horizon, leading to potential data reception issues.
In future work, the potential for further advancements in this technology can be explored. For instance, the integration of a complex sensor error framework, refining the Kalman filter matrix, and reconciling the frequency disparities between the systems can lead to even greater positioning precision and robustness. Additionally, the assimilation with alternative satellite clusters can further enhance the accuracy of positioning information. Furthermore, the potential impact of complex environmental factors on the operation of LeGNSS can be analysed to explore the possibility of expanding the list of satellite systems or sensors to improve the accuracy of positioning information.
Conflict of Interest
The authors declare no conflict of interest.
References Enhancing Data Processing Methods to Improve UAV Positioning Accuracy
- Sayed, A. N., Ramahi, O. M., & Shaker, G. (2023). Detection and classification of drones using radars, AI, and full-wave electromagnetic CAD tool. In Drones - Various Applications, IntechOpen, pp. 1-25.
- Chen, V. C., Li, F., Ho, S.-S., & Wechsler, H. (2006). Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Transactions on Aerospace and Electronic Systems, 42(1), pp. 2-21.
- Nosich, A. I., Poplavko, Y. M., Vavriv, D. M., & Yanovsky, F. J. (2002). Microwaves in Ukraine. IEEE Microwave Magazine, 3(4), pp. 82-90.
- Yanovsky, F. (2008). Millimeter-wave radar: Principles and applications. In Millimeter wave technology in wireless PAN, LAN, and MAN. Auerbach Publications, CRC Press, pp. 305-376.
- Yanovsky, F. J., Russchenberg, H. W. J., & Unal, C. M. H. (2005). Retrieval of information about turbulence in rain by using Doppler-polarimetric radar. IEEE Transactions on Microwave Theory and Techniques, 53(2), pp. 444-450.
- Yanovsky, F. (2022). Retrieving information about remote objects from received signals. In M. Andriychuk, M. Antyufeyeva, & O. Bagatska (Eds.), 2022 IEEE 2nd Ukrainian Microwave Week (UkrMW), IEEE, pp. 512-517.
- Wang, D., & Ali, Z. A. (Eds.). (2023). Advances in UAV detection, classification and tracking. MDPI Books.
- Bokal, Z. M., Sinitsyn, R. B., & Yanovsky, F. J. (2011). Generalized copula ambiguity function application for radar signal processing. 2011 Microwaves, Radar and Remote Sensing Symposium (MRRS), pp. 313-316.
- Yanovsky, F. J., Sinitsyn, R. B., Chervoniak, Y., Makarenko, V., Tokarev, V., & Zaporozhets, O. (2016). Moving target detection and tracking using passive acoustic radar. 2016 IEEE Radar Methods and Systems Workshop (RMSW), pp. 87-90.
- Thomas, T. (2020). Russia's electronic warfare force: Blending concepts with capabilities (MITRE Product No. MP 19-2714, 9-10-2020). MITRE Corporation.
- Yan, D., & Ni, S. (2022). Overview of anti-jamming technologies for satellite navigation systems. 2022 IEEE 6th Information Technology and Mechatronics Engineering Conference (ITOEC), pp. 118-124.
- Li, B., et al. (2018). LEO enhanced global navigation satellite system (LeGNSS) for real-time precise positioning services. Advances in Space Research, 63(1), pp. 73-93.
- Schrader, D. K., et al. (2016). Real-time averaging of position data from multiple GPS receivers. Measurement, 90, pp. 329-337.
- He, H., Li, J., Yang, Y., Xu, J., Guo, H., & Wang, A. (2014). Performance assessment of single- and dual-frequency BeiDou/GPS single-epoch kinematic positioning. GPS Solutions, 18, pp. 393-403.
- Zhukov, I. (2010). Implementation of integral telecommunication environment for harmonized air traffic control with scalable flight display systems. Aviation, 14(4), pp.117-122.
- Oxley, A. (2017). Uncertainties in GPS positioning: A mathematical discourse. Academic Press.
- Li, B., Ge, H., Ge, M., Nie, L., Shen, Y., & Schuh, H. (2018). LEO enhanced Global Navigation Satellite System (LeGNSS) for real-time precise positioning services. Advances in Space Research, 63(1), pp. 73-93.
- Ge, H., Li, B., Jia, S., Nie, L., Wu, T., Yang, Z., … Ge, M. (2022). LEO Enhanced Global Navigation Satellite System (LeGNSS): progress, opportunities, and challenges. Geo-Spatial Information Science, 25(1), pp. 1-13.
- Kharchenko, V., Kliushnikov, I., Rucinski, A., Fesenko, H., & Illiashenko, O. (2022). UAV fleet as a dependable service for smart cities: Model-based assessment and application. Smart Cities, 5(3), pp. 1151-1178.
- J. Zidan, E. I. Adegoke, E. Kampert, S. A. Birrell, C. R. Ford and M. D. Higgins. (2021). GNSS Vulnerabilities and Existing Solutions: A Review of the Literature. In IEEE Access, 9, pp. 153960-153976.
- Zhou, Q., Ding, S., Qing, G., & Hu, J. (2022). UAV vision detection method for crane surface cracks based on Faster R-CNN and image segmentation. Journal of Civil Structural Health Monitoring, 12, pp. 845-855.
- Dolintse, B. I. (2023). Architecture of integrated navigation systems with enhanced coordinate accuracy and fault detection. Problems of Informatization and Control, 2(74), pp. 31-37.
- Liu, W., & Wu, P. (2023). Multi-UAV collaborative absolute vision positioning and navigation: A survey and discussion. Drones, 7(4), pp. 254-261.
- Zhukov, I., & Dolintse, B. (2023). Enhancing accuracy of information processing in onboard systems of UAVs. Technology Audit and Production Reserves, 5(2), pp. 6-10.
- Boley, A. C., & Byers, M. (2021). Satellite mega-constellations create risks in Low Earth Orbit, the atmosphere and on Earth. Scientific Reports, 11(1), Article 10642.
- Khalife, J., Neinavaie, M., & Kassas, Z. M. (2022). The first carrier phase tracking and positioning results with Starlink LEO satellite signals. IEEE Transactions on Aerospace and Electronic Systems, 58(2), pp. 1487-1491.
- Neinavaie M., Khalife J., Kassas Z. M. (2022). Acquisition, Doppler Tracking, and Positioning With Starlink LEO Satellites: First Results. IEEE Transactions on Aerospace and Electronic Systems. 2022. Vol. 58, № 3. P. 2606–2610.
