Ensuring extreme regulation of power of primary energy sources at their joint operation for total load

Author: Nepomnyashchiy O. V., Krasnobaev Y. V., Yablonsky A. P., Solopko I. V., Lichargin D. V.
Journal: Siberian Aerospace Journal @vestnik-sibsau-en
Section: Aviation and spacecraft engineering
Article in issue: 1 vol.21, 2020.
Free access
Heterogeneous energy sources and homogeneous energy sources with different characteristics are frequently used in autonomous power supply systems. Solar batteries are widely used as primary energy sources for on-board power supply systems of spacecrafts, unmanned and manned aircrafts. Renewable energy sources such as solar, wind, geothermal and hydro energy, serve as primary energy sources of terrestrial autonomous power supply systems. Matching primary energy sources with different characteristics and operating conditions within a unified power supply system leads to problems connected with the power control of energy sources, which determines the relevance of the considered problems. The main aim of the study is to develop a combination of primary energy sources and control techniques which allow using primary energy sources with different characteristics and operating conditions in unified autonomous power supply system. The objectives of the study are to create the simulation model of a power supply system using MATLAB/Simulink software; to develop and test control algorithms for primary energy source controllers that would allow to maintain the needed battery charging current; to develop and test control algorithms for primary energy source controllers that would allow the primary energy sources to operate in the maximum power point tracking mode and to minimize the maximum power point search time. Methods used in the study: the simulation of a power supply system using MATLAB 7.9 Simulink software. Results: the simulation model of a power supply system including two primary energy sources with different characteristics is designed. In the case of excess power generating by the primary energy source, its controller operates in the battery charging mode. When the primary source power shortage occurs, its controller operates in the maximum power point tracking mode. The proposed power supply system structure allows controlling two energy sources independently, thus the primary energy source controllers can operate in different modes. This provides flexibility of the power supply system. The use of fuzzy logic control algorithm increases the accuracy and search speed of the maximum power point tracking algorithm. Simulation results confirmed the efficiency of the proposed solar controller operation algorithms in all modes stated above. The efficiency of controller operation modes selection algorithm was confirmed in different operating conditions. The proposed algorithms allow implementing the effective control of primary power sources depending on power supply system operating conditions.
Autonomous power supply system, solar cell, solar controller, simulation model, battery, maximum power point tracking.
Short address: https://sciup.org/148321724
IDR: 148321724 | UDC: 621.31.629.78 | DOI: 10.31772/2587-6066-2020-21-1-85-95
Text of the scientific article Ensuring extreme regulation of power of primary energy sources at their joint operation for total load
Introduction. In the autonomous power supply systems (PSS) wide used renewable energy sources. In PPS of spacecrafts and unmanned and manned aircrafts the solar panel are widely used as primary sources of energy [1–3]. Renewable energy sources, such as the sun, wind, waves, rivers, tides, etc., provide energy to ground-based autonomous objects [2–5].
Heterogeneous energy sources, and in some cases homogeneous energy sources with different characteristics are studied below. The use of various combinations of dissimilar energy sources allows reducing the consumer’s dependence on changing external conditions that affect the output of the useful power of some autonomous power supply systems [3–7]. In space-based PSSs, the primary sources (PS) of energy are mainly solar panels (SP) [8–11].
Design features of the placement of several SPs on the spacecraft can lead to significantly diverse external characteristics of these SPs.
Coordination of primary energy sources with different characteristics and operating conditions within the unified PSS leads to additional difficulties in ensuring their joint work, in particular, with extreme power control of each PS.
Problem formulation . Autonomous power supply systems include directly primary energy sources, a storage
battery (SB), a cable network and PS controllers, made in the form of converters with control devices.
The article describes operating algorithms and structure of SP controllers is a part of an autonomous power supply system with solar panels as primary energy sources. The operating algorithm of the SP controller should provide a charge of the battery with a constant current of a given value, as well as charging battery with a decreasing current while maintaining a certain fixed voltage on the battery in the case when the current power of the battery exceeds the total power consumed by the load and the battery. In the case when the current SP power is less than the total power consumed by the load and the battery, the SP controller operates in the search mode for extreme power and provides the selection of maximum power from the SP.
PSSs of microsatellites and small spacecrafts usually include several sections of solar panels located on each side of the spacecraft [8–10]. Therefore, the SP sections of such a spacecraft are in various lighting conditions and make various contributions to the total power of the solar cells. Moreover, sections of the SP can have different characteristics, and the maximum power that each section of the SP can generate depends not only on the individual characteristics of the section, but also on the orientation of the section on the Sun.
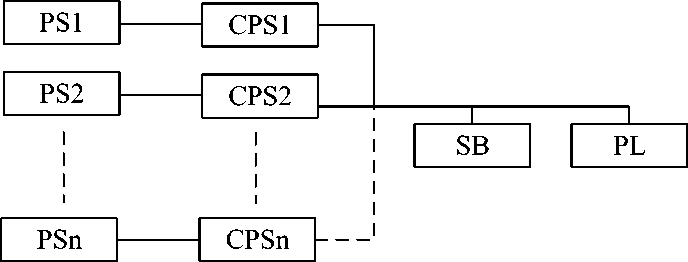
Fig. 1. Structural diagram of autonomous power supply system with several primary energy sources
Рис. 1. Структурная схема автономной системы энергоснабжения с несколькими первичными источниками энергии
When several SPs with different characteristics are connected to the total load in parallel using a common voltage converter [4; 8; 9], the position of the operating points on the power characteristic of each energy source cannot be individually controlled, since the SP controller in this case will provide control of the position of the operating point on the resulting power characteristic of parallel connected SP. In the extreme power selection mode, this leads to a decrease in the total power given by the SP to the load. Thus, it becomes necessary to use individual SP controllers, which can provide regulating the position of the operating points on the power characteristics for the SP independently.
The state-of-art of microcontroller technology allows reducing the size of the control device and implementing control of the SP controller based on the microcontroller [12]. At the same time, it becomes possible to implement not only a step-by-step algorithm for searching an extremum of SP power [13–15], but also more complex algorithms that speed up the searching process for an extremum and increase the power level generated by SP while reducing the amplitude of the operating point oscillations on the current-voltage characteristic of the SP in a neighborhood maximum power points [16; 17]. The acceleration of the extremum search process is especially important in the case of spacecraft rotation around its axis with a certain angular speed [9; 10]. Approaches to the implementation of a power supply system with several energy sources, as well as control algorithms for SP controllers, are considered in this paper.
Solutions. When solving the problem of regulating the power of each primary source individually, we use the structural diagram of an autonomous PSS, shown in fig. 1
In accordance with the structural diagram shown in fig. 1, energy sources PS1 and PSn are connected in series to the controllers PS (CPS1 and CPSn). Output terminals controllers CPS1-CPSn connected to the SB and the power load (PL). Thus, it becomes possible to implement independent control of energy sources and ensure the operation of the following controller operation modes:
-
– battery charge mode with direct current of the given fixed value;
-
– search mode for the extreme power of the solar battery.
When power of the source is available and the battery needs to be charged, the SP controller charges the battery with direct current of the given fixed value I SB.set , subject to the limitation of the voltage U SB on the battery. Fig. 2 shows a block diagram of an algorithm for charging a battery with a given fixed current.
According to the algorithm, the SP controller reads the voltage and current signals of the battery, after which the condition for the voltage on the battery managed to reach its maximum voltage value is checked. If this condition is met, then the SP controller disconnects the battery from the energy source. If the condition is not met, then the equality of the present current value and the set value of the optimal charge current is checked. If the present current value is in a certain predetermined range, then it is equal to the optimal charging current with some error, then the demanded cycle ratio remains constant. If the charge current is less than the specified one, taking into account the error, then the pulse duty ratio increases by a certain amount, otherwise it decreases. The magnitude of the change in the duty cycle of pulses in one step of the algorithm is set programmatically and does not change during the operation of the algorithm.
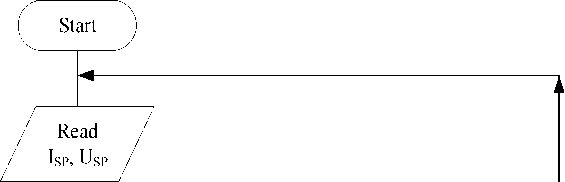
If the primary source of a power shortage is detected, the SP controller selects the extreme power of the solar battery operating in accordance with the developed extreme power search algorithm. In the extreme power search mode, the operating point on the SP power characteristic performs oscillations in the nearest of the maximum power point. In this case, part of the SP power exceeding the power consumed by the load, is supplied to the battery charge. Fig. 3 shows a block diagram of a step-by-step algorithm of the controller operates in the search mode for extreme power [16].
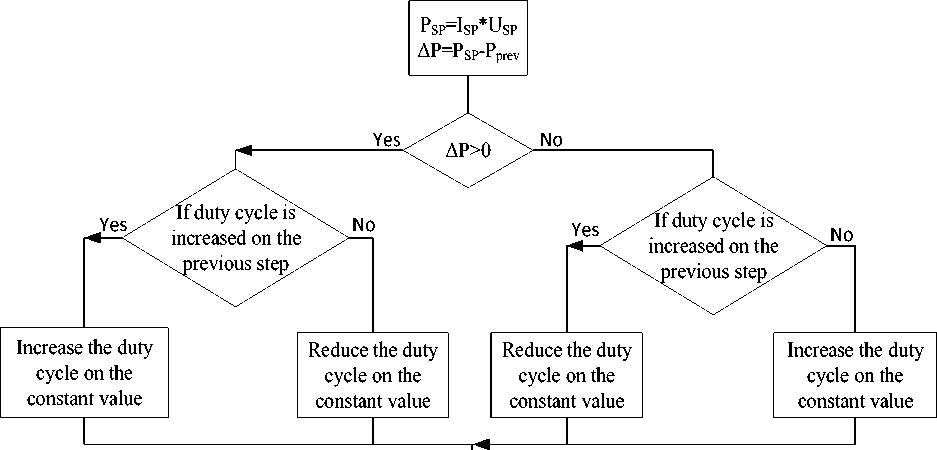
In the extreme power search mode, the controller reads the current and voltage signals of the SP, and then multiplies them. If the signals are measured for the first time, then the current power is defined as the power received from the SP in the previous step. Next, an increase in the fill factor of the control pulses by a certain value k is viewed, being determined by the controller based on fuzzy logic occurred, then the current power of the SP is again calculated. If the power has increased to the value compared to the value stored in the previous step, then a
further increase in the duty cycle is observed. In the case when the measured power decreases, the direction of movement of the operating point is changed according to the power characteristic of the SP, and, consequently, a decrease in the fill factor of the control pulses is viewed.
The value of step k in the extreme power search mode is calculated by the fuzzy logic control unit [18–20], the
input variables of which are the derivative of the power with respect to voltage dP / dV for one step of searching for extreme power, as well as the absolute change in power dP for this step.
Fuzzy terms of the values of step k depending on the values of the terms of the input variables of the controller are given in table.
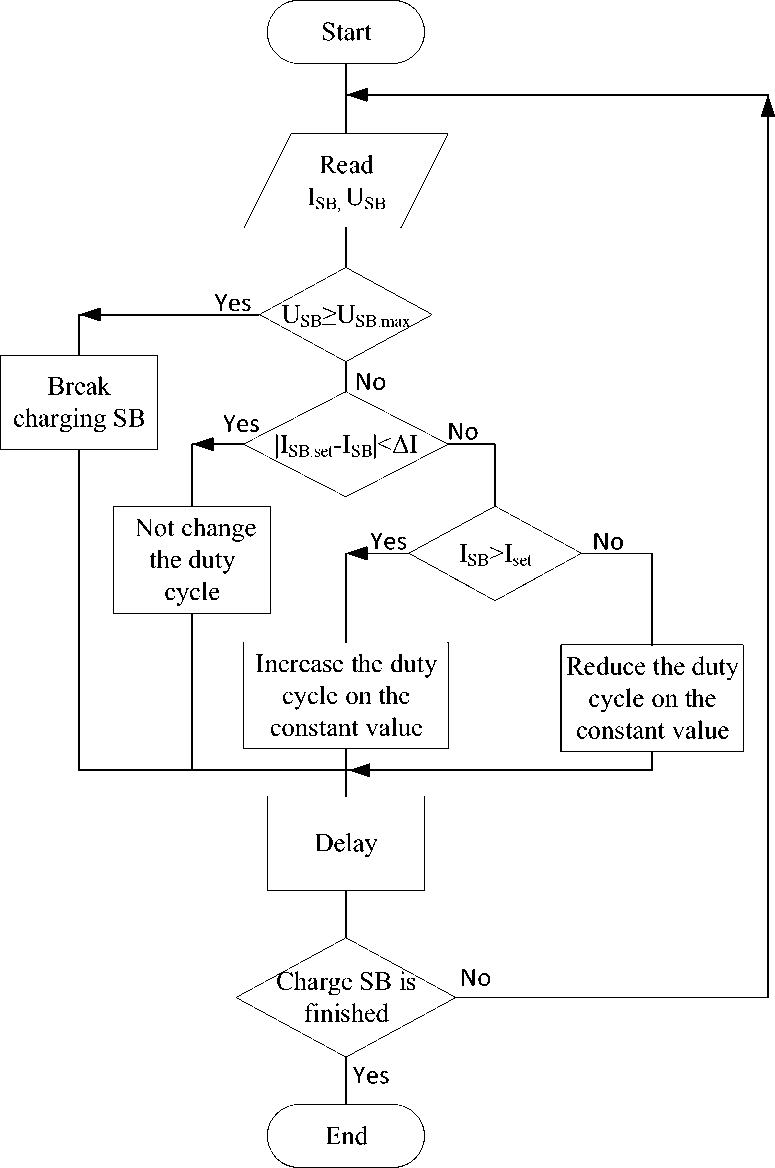
Fig. 2. Flowchart of the algorithm of specified fixed current battery charging mode
Рис. 2. Блок-схема алгоритма зарядки аккумулятора фиксированного тока
Delay
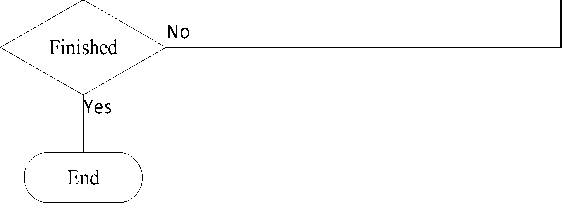
Fig. 3. Flowchart of maximum power point tracking algorithm
Рис. 3. Блок-схема алгоритма отслеживания точки максимальной мощности
Values of k step terms in the maximum power point tracking mode
|
dP/dV dP |
NL (Negative large) |
NS (Negative small) |
NZ (Near zero) |
PS (Positive small) |
PL (Positive large) |
|
NL (Negative large) |
Highest |
High |
Middle |
High |
Highest |
|
NM (Negative moderate) |
High |
Middle |
Low |
Mode Middle rate |
High |
|
NS (Negative small) |
Middle |
Low |
Lowest |
Low |
Middle |
|
NZ (Near zero) |
Low |
Lowest |
Lowest |
Lowest |
Low |
|
PS (Positive small) |
Middle |
Low |
Lowest |
Low |
Middle |
|
PM (Positive moderate) |
High |
Middle |
Low |
Middle |
High |
|
PL (Positive large) |
Highest |
High |
Middle |
High |
Highest |
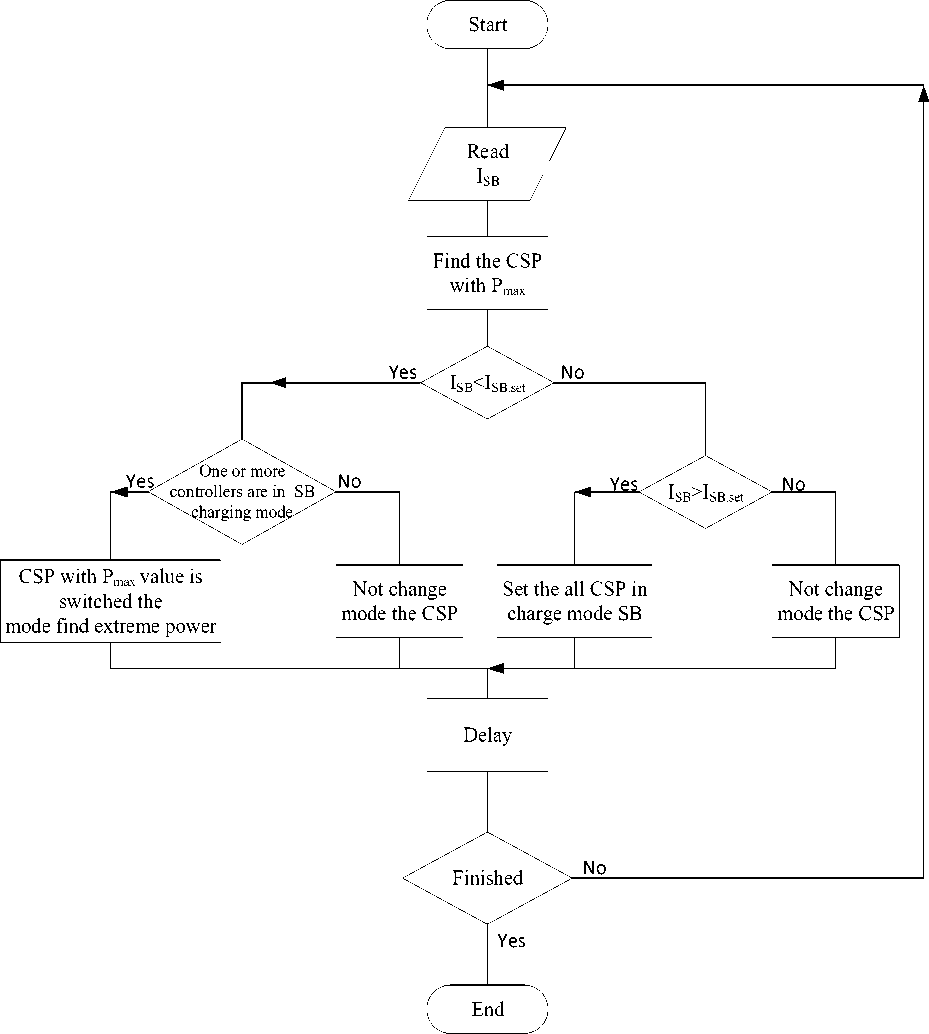
Fig. 4. Flowchart of solar controllers operation modes selection algorithm
Рис. 4. Блок-схема алгоритма выбора режима работы контроллеров солнечных батарей
The choice of the current operating modes of the SP controllers is determined by the unit selecting an operating mode (USOM). The flowchart of the operation algorithm USOM of the SP controllers is shown in fig. 4.The mode selection block at each step of operation determines the SP controller with the highest current power value. If the SP controller with the highest power value operates in the battery charge mode with a fixed current, and the current value of the charging current ISB is less than the specified ISB.set, this controller is put into the search mode for extreme power. The choice of the SP controller with the highest power value is due to the potentially largest increase in the current delivered to the load and to the battery charge after switches it to the extreme power search mode.
This allows reducing the time for switching operating modes of other SP controllers in the case of transferring the switch of one controller to the extreme power search mode and achieves the set value of the charging current ISB.set. If controllers operate in the extreme power search mode, and the charging current value ISB is still less than the specified ISB.set, the controller operating mode does not change, since in this case it is not possible to ensure a further increase in the power transmitted from the sources. In the case when the SP controllers operate in the search mode of extreme power, and the value of the charging current ISB exceeds the set value ISB.set, all SP controllers are switched to the battery charge mode with a fixed current. Each cycle of the mode selection unit finishes with the time delay necessary to complete the transient processes after changing the operation mode of the SP controller.
To test the proposed control algorithms was developed of a simulation model the power supply system with two primary sources in the MATLAB / Simulink environment was developed, the module is shown in fig. 5.
The simulation model of the power supply system contains two primary sources of energy represented by the solar panels SP1 and SP2, which represent several series-connected solar cells from the library of components of Simscape [21]. SP1 and SP2 are connected to the controllers a CSP1 and CSP2 running on the total load PL in the form of resistors R2 and R3 and the battery – SB with an internal resistance R1. SP controllers consist of control units (CU1 and CU2) together with voltage converters CSP1 and CSP2 and represent functional blocks, the functioning algorithms of which accord with the control algorithms shown in fig. 2 and 3.
The converters CSP1 and CSP2, which are part of the controllers CSP1 and CSP2 accord with the scheme of a step-down voltage converter [4; 8; 13–16]. USOM is a functional block that contains the m-code as a built-in function for the Simulink environment [22]. The input of the mode selection block receives signals about the current operating mode of each controller, the current power values of each energy source, as well as the current value of the current ISB of the battery. The USOM functioning algorithm is developed in accordance with the flowchart shown in fig. 4.
A comparative analysis of the operation of extreme power search algorithms with a fixed step and a variable step is shown in fig. 6.
The analysis of time diagrams of the extreme power search algorithm operating showed that the use of a variable step in the extreme power search algorithm based on fuzzy logic increases the search speed of the maximum power point by 50.8%. The searching algorithm for extreme power with a variable step, developed using fuzzy logic, also reduces the underutilization of the SP power caused by fluctuations in the operating point relative to the point of maximum power of the SP by 2.8 %.
In fig. 7 shows a time diagrams of the current battery I SB , it explains the process of changing the operating modes of the SP controllers.
In the time interval from t = 0 to t0, the controllers of the power supply system do not change the fill factor of the control pulses of the converters and the current of the battery ISB charge remains constant. At time t0, both power system controllers are put into battery charge mode with a given fixed current. At this time, a gradual increase in the fill factor of the control pulses occurs, which leads to an increase in current I SB up to the value of the optimal charge current I SB.set = 10 A. At the time t1, the process of increasing the fill factor of the pulses ends, since the value of the charging current I SB becomes equal to I SB.set with some predetermined error. At the time t2 , an additional load is connected, which leads to a stepwise increase in the load current and a decrease in the charging current ISB , after which the controller starts the process of increasing the duty cycle of the pulses in order to achieve the specified optimal value I SB.set with the charging current.
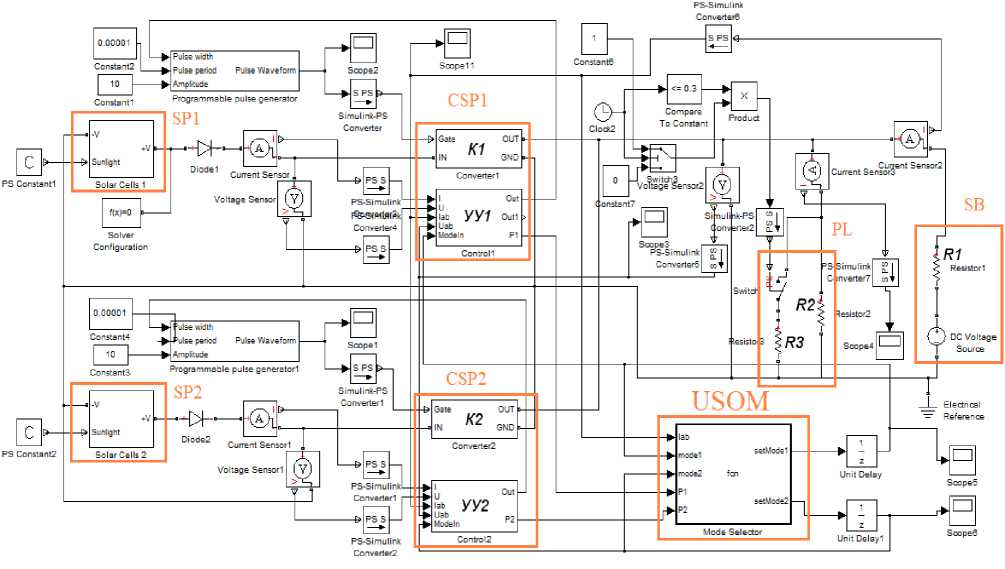
Fig. 5. Simulation model of the power supply system with two primary energy sources
Рис. 5. Имитационная модель системы электроснабжения с двумя первичными источниками энергии
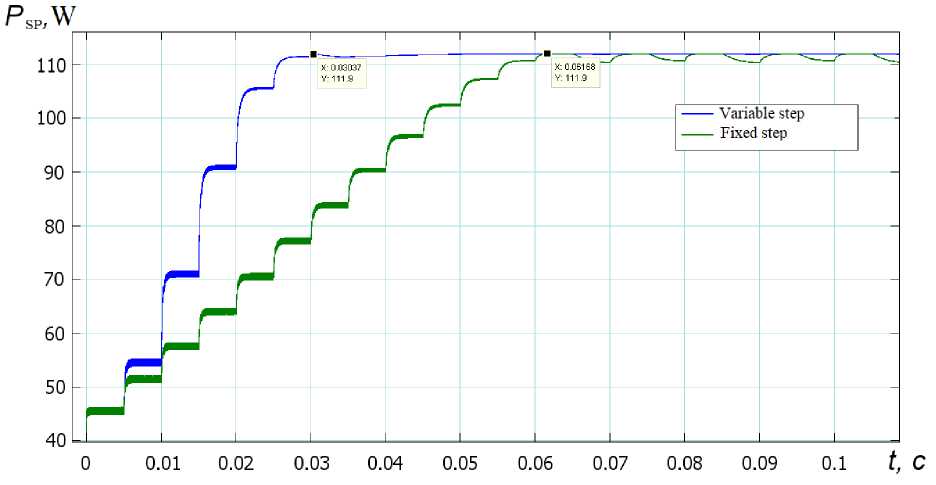
Fig. 6. Change in solar panel power in the maximum power point tracking mode
Рис. 6. Изменение мощности солнечной панели в режиме отслеживания точки максимальной мощности
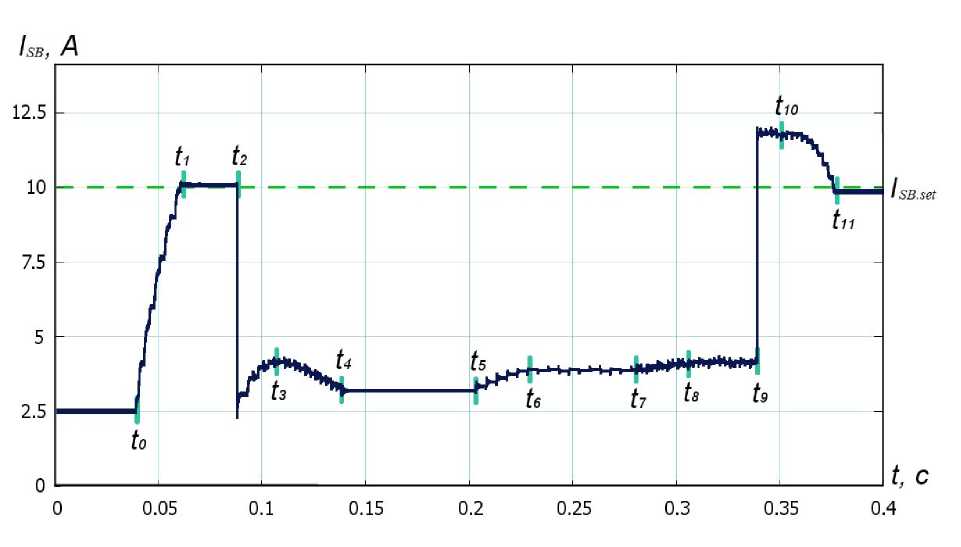
Fig 7. Change in battery current in the process of solar controllers modes switching
Рис 7. Изменение тока батареи в процессе переключения режимов работы солнечных контроллеров
At time t3, the operating points on the characteristics of the solar cells SP1 and SP2 are located in the vicinity of the maximum power point, but the controllers, in accordance with the control algorithm, continue the process of increasing the fill factor of the control pulses up to time t4, when the maximum value of the fill factor is observed. Since the optimal value of the charging current ISB.set= 10 A was not achieved during the operation of the SB charge mode algorithm, at the time t5, the SP controller with the highest current power value (in this case SP1) switches to the search for extreme power, and the operating point on the power characteristic SP1 starts moving towards the point of maximum power of the solar battery. By the time t6, the operating point on the power characteristic SP1 reaches the vicinity of the maximum power point, which, however, does not lead to the achievement of the specified optimal value ISB.set by the charging current ISB. Further, at the time t7, the SP controller with a lower value of the current power (SP2) switches to the extreme power search mode, and the operating point on the power characteristic SP2 starts moving towards the maximum power point. By the time t8, the operating point on the power characteristic SP2 reaches a neighborhood of the maximum power point. At the time t9, the additional load is switched off, which leads to a stepwise decrease in the load current and an increase in the charging current ISB. At time t10, the mode selection unit, in accordance with the operation algorithm, switches both controllers to the battery charge mode with a fixed current, after which the process of decreasing the duty cycle of the pulses begins in order to achieve the specified optimal value ISB.set by the charging current. By the time t11, the charge current ISB of the battery again reaches its optimum value ISB.set = 10 A with some predetermined error.
Conclusion.
-
1. Operating several electric energy sources including energy stores within of unified autonomous power supply system erases the problem of their coordinated teamwork aimed at the effective utilization of their occur, in particular a problem of the maximal outfeed of energy from renewed energy sources.
-
2. The simulation model of the power supply system, including two energy sources with various characteristics has been developed. At surplus of the capacity generated by a primary energy source, the energy source controller operates in battery charging mode with a given fixed current. In the case of primary source power shortage the controller operates in a mode of search of extreme capacity. The structure of the power supply system allows operating two energy sources independently. Thus, energy source controllers can operate in various modes of operation, providing the raised flexibility of power supply system. The use of control algorithm on the base of fuzzy logic increases speed of search of a point of the maximal capacity, as well as increases accuracy of the implementation of the algorithm.
-
3. The experimental study of the developed model have confirmed working capacity of control algorithms of the solar battery controllers in all operation modes. The efficiency of the algorithm for choosing the controller operating modes in various conditions is confirmed. The introduced algorithms provides effective capacity regulation of primary energy sources depending on various operating conditions for autonomous power supply systems.
References Ensuring extreme regulation of power of primary energy sources at their joint operation for total load
- Wu B., Zhuo F., Long F., Gu W., Qing Y., Liu Y. A management strategy for solar panel – battery – super capacitor hybrid energy system in solar car. 8th International Conference on Power Electronics – ECCE Asia; 30 May-3 June 2011.
- Zhu, X., Guo, Z., Hou, Z., Gao, X. and Zhang, J. Parameter’s sensitivity analysis and design optimization of solar-powered airplanes. Aircraft Engineering and Aerospace Technology, 2016. Vol. 88 No. 4, pp. 550-560.
- Lawhorn D., Rallabandi Vandana., Ionel D. Power Electronics Powertrain Architectures for Hybrid and Solar Electric Airplanes with Distributed Propulsion. 2018 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS); 12-14 July 2018.
- Dontsov O., Ivanchura V., Krasnobaev Y., Post. S. [Autonomous power supply system with extreme power control of primary energy sources]. Izvestiya Tomskogo politekhnicheskogo universiteta. Inzhiniring georesursov. 2016, Vol. 327, No. 12, P. 35–44 (In Russ.).
- Trends 2013 in photovoltaic applications. Survey report of selected IEA countries between 1992 and 2012. Available at: http://helapco.gr/pdf/IEA_PVPS_Trends_Report_2013_v1_0_01.pdf (accessed 15.09.2019).
- Lukutin B. Decentralizovannye sistemy elektrosnabzheniya s vetrovymi i solnechnymi elektrostantsiyami [Decentralized power supply systems with wind and solar power stations]. Tomsk, Tomsk Polytechnic University Publ., 2015, 100 p.
- International Renewable Energy Agency: Vision and Mission. Available at: http://www.irena.org/menu/index.aspx?mnu=cat&PriMenuID=13&CatID=9 (accessed 16.09.2019).
- Soustin B. Sistemy elektropitaniya kosmicheskikh apparatov [Spacecraft power supply systems]. Novosibirsk, Nauka Publ., 1994, 318 p.
- Fortescue P., Swinerd G., Stark J. (Eds.). (2011, August). Spacecraft Systems Engineering, (4th ed.). John Wiley & Sons, Ltd, 2011, 691 p.
- Norton C., Pellegrino S., Johnson M. (2014, July) Small Satellites: A Revolution in Space Science. Available at: http://www.kiss.caltech.edu/study/smallsat/KISSSmallSat-FinalReport.pdf (accessed 21.09.2019).
- Makridenko L., Boyarchuk K. Mikrospuntniki. Tendentsiya razvitiya. Osobennosti rynka i sotsialnoe znachenie [Microsatellites. Development trend. Market characteristics and social impact]. Available at: http://jurnal.vniiem.ru/text/102/2.pdf (accessed 24.09.2019).
- The development of microprocessor technology. The structure and mode of modern microprocessors. Available at: http://life-prog.ru/view_articles.php?id=334 (accessed 24 .09.2019).
- Shinyakov Y., Otto A., Osipov A., Chernaya M. Autonomous power plant with extreme step regulator of solar battery power. Alternative Energy and Ecology. 2015, No. (8-9), P. 12–18.
- Ivanchura V. I. [Solar cell controller with maximum power point tracking]. Elektromekhanicheskie preobrazovateli energii. VI Mezhdunarodnaya nauchnotekhnicheskaya konferentsiya [Electromechanical energy converters. VI International research conference]. Тomsk, 9–11 October 2013. Vol. 6, P. 180–185 (In Russ.).
- Post S., Dontsov O., Ivanchura V., Krasnobaev Yu. [A simulation model of the solar cell controller]. Izvestiya Tomskogo politekhnicheskogo universiteta. Teknhika i tekhnologiya v energetike. 2014, Vol. 325, No. 4, P. 111–120 (In Russ.).
