Fast Time-varying modal parameter identification algorithm based on two-layer linear neural network learning for subspace tracking

Author: Kai Yang, Kaiping Yu
Journal: International Journal of Information Engineering and Electronic Business(IJIEEB) @ijieeb
Article in issue: 1 vol.3, 2011.
Free access
The key of fast identification algorithm of time-varying modal parameter based on subspace tracking is to find efficient and fast subspace-tracking algorithm. This paper presents a modified version of NIC(Novel Information Criterion) adopted in two-layer linear neural network learning for subspace tracking, which is applied in time-varying modal parameter identification algorithm based on subspace tracking and get a new time-varying modal parameter identification algorithm. Comparing with the original subspace-tracking algorithm, there is no need to set a key control parameter in advance. Simulation experiments show that new time-varying modal parameter identification algorithm has a faster convergence in the initial period and a real experiment under laboratory conditions confirms further its validity of the time-varying modal identification algorithm presented in this paper.
Subspace tracking, time-varying modal parameter, identification algorithm, neural network learning
Short address: https://sciup.org/15013061
IDR: 15013061
Text of the scientific article Fast Time-varying modal parameter identification algorithm based on two-layer linear neural network learning for subspace tracking
Published Online February 2011 in MECS
The key of algorithms based on subspace tracking is to find an efficient and fast algorithm for subspace tracking. The signal subspace obtained by PAST converges asymptotically to the orthogonal subspace, by introducing orthogonal method W = W (WTW)-1/2 OPAST[18] is obtained. Otherwise by deflation technique of PCA(Principal Component Analysis), PASTd[17,19] is derived. Similarly, signal subspace obtained by PASTd has a strong lose of orthogonality, by introducing orthogonal method Gram-Schmit for incorporating characteristic of PASTd, a modified PASTd[20] is obtained. PAST can be viewed as a classical power iteration method. Comparing with PAST, NPI[21,22](Natural Power Iteration) has a faster convergence speed and ensures orthogonality of subspace vectors without compute load increasing. In both PAST and NPI, Wp+1 ® Wp is used in the process of algorithm derivation, so they are only suitable for tracking slow subspace. Different from PAST and NPI, API[23](Approximated Power Iteration) can track rapid subspace and apply updating data in both infinite exponential window and finite moving exponential window. Different from PAST in cost function, NIC[24,25](Novel Information Criterion) is proposed, adopting in two-layer linear neural network learning for subspace tracking. By introducing orthogonal method, a modified version is obtained named FONIC[26].
This paper presents a modified version of NIC adopting in two-layer linear neural network learning for subspace tracking. Comparing with the original algorithm, there is no need to set an important parameter in advance. Simulation experiments show that it has a faster convergence in the initial period.
-
2. Modal parameter identification algorithm based on ED/SVD
The state-space model of linear time-invariable system of n /2 order is denoted as follows:
x ( k + 1) = Ax ( x ) + Bu ( k ), y ( k ) = Cx ( k ) + Du ( k )
Where x ( k ) e R" x 1 is the state vector at the k th sampling instant, A e R " x " is the system state matrix, B e r " x m is the input matrix, u ( k ) e R m x 1 is the corresponding input vector at the k th sampling instant, C e Rr x " is the input matrix , D e R r x m , y ( k ) the output vector.
Constructing Hankel matrix by input/output vectors respectively, we have:
|
U P = |
■ u (1) u (2) M |
u (2) - u (3) - |
u ( P ) u ( p + 1) M |
(2) |
||
|
Y p = |
[ |
_ u ( M ) y (1) y (2) |
u ( M + 1) - y (2) - y (3) - |
u ( p + M — 1 y ( P ) y ( P + 1) M |
) _ |
(3) |
|
Furth YU - pp Wher |
_ y ( M ) y ( M + 1) — y ( P + M — 1) _ er we get = Y p — Y p U P ( U p U P ) - 1 U p = Г XU - = u-=I-UT(U UT —AU , Ppppp , |
I |
(4) is an |
|||
|
identity matrix, Г |
= [ C CA |
— CAM —1" |
T |
is the |
||
|
generalized |
observability |
matrix, |
||||
X = [ x (1) x (2) ”• x (p )] is a matrix constituted by state vector, superscript (D) T denotes matrix transpose.
Do singular value decomposition(SVD) on YpU - , we have:
YU ±=[P Pl pp s n
2 , 0
. 0 2 "
V sT
V nT
Where P s is estimate of Г . For
Y P U P - (Y p U p ) T = YPU P Y" , eigen-decomposition(ED) on YpU - Y p can be used to extract left-singular matrix block P s of YpU - . By (4), we have:
A = Г+Г2
A = ФЛФT (7)
Where Л = diag ( X X 2 -■ X 2" ) and X i = X * + " , superscript * denotes conjugate. By modal analysis theory, we get:
и = 7(XR )2+ (X' )2, X = —XR / и, (8)
Where to i and C i are the natural frequency and damping ratio respectively of the i t order, Xp and X , are the real and imaginary parts respectively of eigenvalue X . In general, natural frequency and damping ratio are included in modal parameters. Here in this paper we focus on time-varying frequency identification.
-
3. Pre-treatment on the updating input/output data
From the second part, evidently each step eigen-decomposition on YpU p Y P costs a large memory space and computation load. Otherwise there is no need to evaluate YpU - Y p and do eigen-decomposition on YpUp Y p for extracting its eigen-matrix in the timevarying modal parameter identification algorithm based on subspace tracking. By adopting recursive form of updating input/output data, principle subspace tracking algorithm can be applied and then fast identification of time-varying modal parameter is achieved. Updating the input and output Hankel matrix, we have:
Y p + i = [ Y p УР + 1 ], U p + i = [ U p U p + 1 ] (9)
Where yp+1 =[yp+1) yp+2) L yp +M], up+1 = [u (p+1) u (p + 2) ^ u (p+M) ]T.
By lemma of matrix inverse
( A + xxT ) - 1 = A - 1 - A - 1 xxT A - 1 / (1 + xT A - 1 x ) (1°) We have:
Y p UY = Y p UY + Z p + 1 ^x (11)
Where Z p1 A YU(U p U T )X - L -L^, ti p +1 = u T + 1 (U p Up ) - 1 u p +1 . Equation (11) is called rank-one updating. If there is no persistent excitation, namely exciting by initial displacement or velocity conditions, then we have zp +1 = y p +1 , U p E Cp x p identity matrix. Such condition is common in the engineering field. Both are referred in this paper.
-
4. Time-varying modal parameter identification algorithm based on neural network learning
After getting the recursive form of updating input/output data, the key of fast identification of timevarying modal parameters is efficient and fast algorithm for subspace tracking. The following is to state the algorithm based on linear two-layer neural network for subspace tracking.
The cost function[23,24] is chosen as:
J nic (W k ) = jw^ W T R ( kW k )] - Г WX )} (12) Where Wk is the signal subspace at k th instant.
Rzz ( k ) = L в - iz^T , ° < в < 1 is the forgetting factor, i = 1
tr ( D ) denotes matrix trace.
By partial differential of matrix trace, we have:
J ( W k ) = R zz ( kXWR ( k ) W ) - 1 - W (13) Further we have:
W = W k - 1 + n V J„ C (W k ) (14)
W = (1 -n k ) W - 1 +n R ( kW ( WR ( kW ) 4,15) Let y k = W k - 1 z k , we get,
W k = (1 -n k )W - 1 +n R y ( k ) R 1 ( k ) (16)
kk
Where R, ( k ) = £ в Ay T , R , ( k ) = Z в - i yy T - = 1 i = 1
By lemma of matrix inverse,
( A + zzT ) - 1 = A - 1 - A - 1 zzT A - 1 /(1 + zT A - 1 z ) , We get
W k = (1 - n k ) W k - 1 + nkWk (17)
и; = W ,-1 + ( z k - W k - 1 y k ) У Г Д-, /( в + y k P k -, y k ) . W k -1 = R z, ( k - 1) P k -,,
P k = (Ilin' ) " ‘ = ( PR„ ( k - 1) + iX ) - 1
= 1
.
n ( Pk -1 n t ух )
Different from the original method, n k is not set in advance. Applying Differential segment,
6nk dJNIC (Wk )
Let dHk
a W k 6n k
= ° , we have:
(zt -W-y„))TP.ч/(в+yTP.-кУк)
k r ’kA
Where ||D| denotes Frobenius norm of matrix.

Linear two-layer NN
T
W k - 1
W
У
y T P k - 1 /( P + y ' P k - y )
, n k
1 - n k
W
I
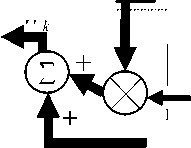
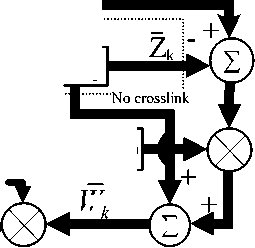
Fig. 1 Algorithm block based on linear two-layer neural network learning for subspace tracking
According to the modified version mentioned above, we get the algorithm block based on two-layer linear neural network learning for subspace tracking showed in Fig.1. Further we get the fast identification algorithm of time-varying modal parameters.
Further construct the system matrix A ( k ) by Wk ,
Ук„ r^-—► wk.,
repeating (6), (7) and (8) for extracting time-varying modal parameters. The whole procedure of the timevarying modal parameter identification algorithm based on two-layer linear neural network learning for subspace tracking is showed as follows:
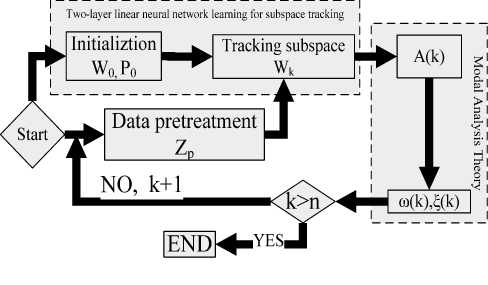
Fig.2 Flowchart of identification algorithm for time-varying modal parameters
-
5. Simulation and Analysis
Moving mass-beam structure is widely used in modelling bridge with moving vehicles, truss with moving crane and so on, which is a typical time-varying structure. Supposing that moving mass keeps contact with beam all the time, neglecting torsion deformation of beam, applying Euler-Bernoulli beam theory, we get the model as follows:
EI ∂ 4 y ( x , t ) + m ∂ 2 y ( x , t ) = F ( x , t ) (20)
∂ x 4 ∂ t 2
Where E is Young’s modulus, I is the second moment of beam cross-section, m is the mass per unit length of beam, y ( x , t ) denotes the transverse deflection of beam, F ( x , t ) is time-varying driving force. Taking the inertia load of moving mass into account[27], we have:
-
1 ∂2y(x,t)
F ( x , t ) = [ - m 0 g - m 0 ][ H ( x - ξ + ) -
ε ∂t2
H(x-ξ-ε2)]-f(t)δ(x-l)(21)
Where m 0 is the moving mass, g is the gravitational acceleration, H ( □ ) is Heaviside unit function, f ( t ) is external excitation force, ^ ( D ) is Dirac-Delta function, ξ = Vt , V = const the moving speed of moving mass. And the other parameters are showed in Fig. 2.
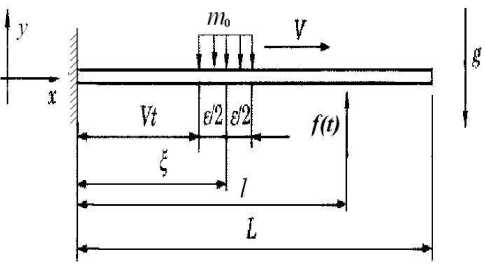
Fig. 3 Moving distributed mass-Cantilever structure
∞
Let y(x,t) = ∑φi(t)Xi(x), with φi(t) is i =1
unknown functions of time and Xi (x) is the shape th functions for the i mode of the vibration beam, which are chosen to be known. Substituting them into (20) and (21) , we have:
M ( t ) Φ ''( t ) +Ω 2 Φ ( t ) = F ( t )
M ( t ) = e I re n : + diag ( m i ) m 0 [ X ( ξ ) XT ( ξ )
+ ε 24 ( X ( ξ ) XT ( ξ ) Λ 2
+ 2 Λ X ( ξ ) XT ( ξ ) Λ+Λ 2 X ( ξ ) XT ( ξ )]
Λ = diag ( β i )
X ( x ) = [ X 1 ( x ) L X,( x ) l X n ( x ) f
Ф ( t ) = [ ф ( t ) ..ф( t ) ™ ф п ( t ) f , In E C n X n
,
, identity
matrix, Q = diag( to i ) , diag ( □ ) denotes diagonal matrix, ω i 2 = β i 4 EI / m , Xi ( x ) should be chosen to meet that
X ( x ) - β 4 X (4)( x ) = 0 , m = mLX 2( x ) dx ,
F ( t ) =- diag ( m i ) m 0 g ( I n + ε 24 Λ 2) X ( ξ ) + f ( t ) X ( l )
The dimension of beam is 1.2 × 0.05 × 0.008 m,
V = 0.2 m/s, EI = 418.13 N.m2,
ξ = 0.07 m, l = 1.0 m,
Xi ( x ) = cosh( β i x ) - cos( β i x ) -
cosh( β i ) + cos( β i ) sinh( β i ) + sin( β i )
(sinh( β i x ) - sin( β i x )) , β i is determined by
-
1 + cos( e L)cosh( e L ) = 0 , i = 1 l n , n takes a limited value as n = 4 .
The identification results of time-varying modal parameter identification algorithms based on different subspace tracking methods, such as the original NIC, the modified NIC presented in this paper and FONIC, are showed in Fig. 4 and 5. The output data incorporates stochastic white noise of signal-noise ratio SNR=43db.
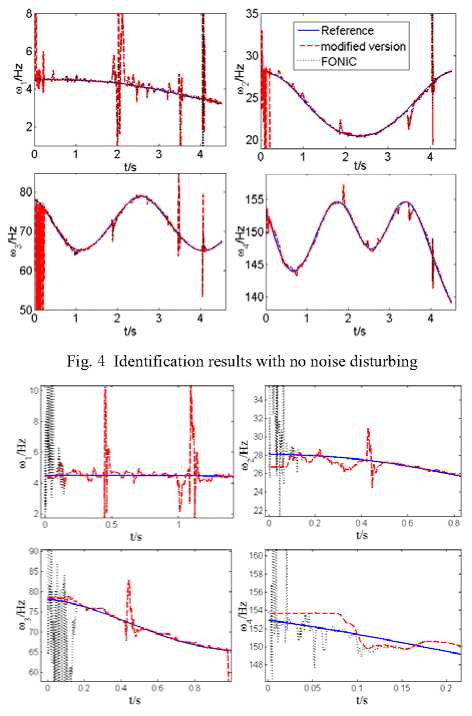
Fig. 5 Identification results with noise disturbing
By Fig.3 and Equation (22), its natural frequencies of the moving distributed mass-cantilever structure change along with time. In Fig.4, the real blue curve denotes theoretic results for reference, with the red dash curve denoting identification results obtained by applying time-varying modal parameter identification algorithm based on modified NIC,which is adopted in two-layer linear neural network learning for subspace tracking and the black dot curve denoting identification results obtained by using time-varying modal identification algorithm based on FONIC. As is shown in Fig. 4 , timevarying modal identification algorithm based on modified NIC has an equivalent performance with that based on FONIC. Otherwise due to adopting orthogonal method in FONIC for subspace tracking, its computation load is greater than that of modified NIC. As is showed in Fig.5, all of the three time-varying modal parameter identification algorithms based on different subspace tracking method have a good tolerance of noise. Showed In Fig.5, evidently the time-varying modal parameter algorithm based on modified NIC, which is adopted in two-layer linear neural network learning for subspace tracking, has a faster convergence speed in the initial period.
To test its performance of the time-varying modal parameter identification algorithm based on two-layer linear neural network learning for subspace tracking, a experiment of cantilever beam with removable mass is designed. Such an experiment is divided into three parts. First test its natural frequencies of cantilever beam with removable mass on it by applying conventional modal analysis method, such as Power Spectrum Density Analysis. Second repeat the first part on cantilever beam without removable mass on it. Third sample its vibration response data in the form of acceleration excited by shock and remove abruptly the moveable mass in the data sampling procedure. Do data processing by using the time-varying modal parameter identification algorithm based on two-layer linear neural network learning for subspace tracking presented in this paper. The experiment equipment is showed in Fig.6. There are two piezoelectric accelerometers, a cantilever beam, a removable mass, a hammer used as plus excitation, a set of data collecting system named DASP V10 showed in Fig.6 and data processing system ,mainly a set of modal analysis software and corresponding hardware, doesn’t be showed in Fig.6.

Fig.6 the experiment equipment out of work
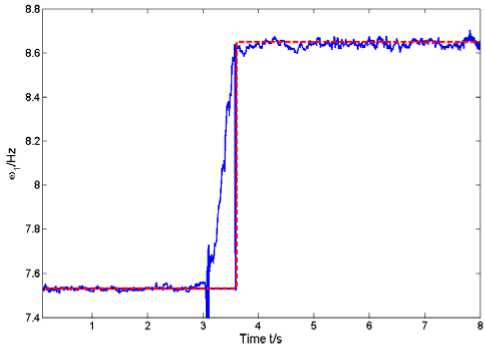
Fig.7 the first-order abrupt natural frequency
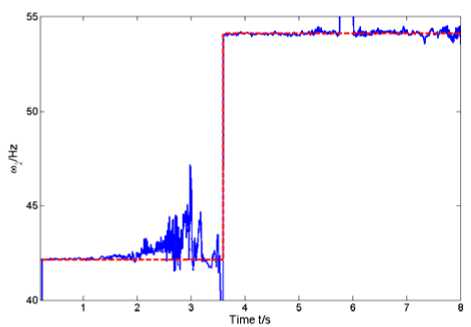
Fig.8 the second-order abrupt natural frequency
In Fig.7 and 8, the blue real curve denotes the identification results with the red dash curve denoting the testing value for reference. In Fig.7 the first-order natural frequency changes from 7.53Hz to 8.65Hz and in Fig.8 the second-order natural frequency changes from 42.1Hz to 54.1Hz. Evidently we can foresee change of natural frequencies in the third part of the designed experiment. And identification results showed in Fig. 7 and 8 just coincide with what we test, which confirms its performance of the time-varying modal parameter identification algorithm based on two-layer linear neural network learning for subspace tracking presented in this paper.
-
6. Conclusion
The key of fast identification algorithm of timevarying modal parameters is to find efficient and fast signal subspace tracking algorithms. This paper applies the modified NIC adopted in two-layer linear neural network learning for subspace tracking to achieve fast identification algorithm of time-varying modal parameters. For the modified version of NIC, using in two-layer linear neural network learning for subspace tracking, there is no need to set an important factor in advance and has a faster convergence speed in the initial period demonstrated by simulation experiment results. And real experiment under laboratory conditions confirms its validity of the time-varying modal parameter identification algorithm presented in this paper in extracting time-varying modal parameters.
References Fast Time-varying modal parameter identification algorithm based on two-layer linear neural network learning for subspace tracking
- Zou Jingxiang, Yu Kaiping and Pang Shiwei. Methods of time-varying structural parameter identification[J]. Advances in mechanics, 2000, 30(3):370-377
- Kefu Liu . Extension of modal analysis to linear time-varying system[J] . Journal of Sound and Vibration, 1999, 226(1):149-167
- Kefu Liu . Identification of linear time-varying system[J] . Journal of Sound and Vibration, 1997,206(4):487-505
- Juang J N and Pappa R S . An eigensystem realization algorithm for modal parameter identification and model reduction[J] . Journal of Guidance, Control and Dynamic, 1985,8(5):620-627
- Longman R W and Juang J N . Recursive form of the Eigensystem Realization algorithm for system identification[J] . Journal of Guidance, Control and Dynamic, 1989, 12(5):647-652
- Yu Kaiping, Xie Lili, Fan Jiuming et.al . A parameter identification of simple supported beams system carrying a moving mass[J] . Earthquake engineering and engineering vibration, 2002, 22(5):14-17
- Pang Shiwei, Yu Kaiping and Zou Jingxiang . Improved subspace method with application in linear tie-varying structural modal parameter indentification[J] . Chinese Journal of applied mechanics, 2005, 22(2):184-189
- Yang Lifang, Yu Kaiping, Pang Shiwei et. al . Comparison study on identification methods applied to linear time-varying structures[J] . Journal of Vibration and Shock, 2007,26(3):8-12
- F Tasker, A Bosse, S Fisher . Real-time modal parameter estimation using subspace methods:theory[J] . Mechanical Systems and Signal Processing,1998,12(6):797-808
- A Bosse, F Tasker, S Fisher . Real-time modal parameter estimation using subspace methods: application[J] . Mechanical Systems and Signal Processing, 1998, 12(6):809-823
- E M Dowling, L P Ammann and R D Degroat . A TQR-iteration based adaptive SVD for real time angel and frequency tracking[J] . IEEE Transactions on Signal Processing, 1994,42(4):914-926
- Wu Riqiang, Yu Kaiping and Zou Jingxiang . An improved subspace method and its application to parameter identification of time-varying structures[J] . Engineering Mechaics,2002,19(4):67-70
- Michel Verhaegen , Xiaode Yu . A class of subspace model identification algorithms to identify periodically and arbitrarily time-varying systems[J] . Automatica, 1995, 31:201-216
- Hiroshi Oku and Hidenori Kimura . Recursive 4SID algorithms using gradient type subspace tracking[J] . Automatica, 2002,38:1035-1043
- Pang Shiwei, Yu Kaiping and Zou Jingxiang. A projection approximation recursive subspace method for identification of modal parameter of time-varying structures [J]. Engineering Mechanics, 2002, 22(5):115-119
- Pang Shiwei, Yu Kaiping and Zou Jingxiang . Time-varying system identification using recursive subspace method based on free response data[J] . Journal of Vibration Engineering,2005, 18(2):233-237
- Bin Yang . Projection Approximation subspace tracking[J] . IEEE Transactions of Signal Processing, 1995, 43(1):95-107
- K Abed-Meraim, A Chkeif and Y Hua . Fast orthonormal PAST algorithm[J] . IEEE Signal Processing Letters, 2000, 7(3):60-62
- Bin Yang . An extension of the PASTd algorithm to both rank and subspace tracking[J] . IEEE Signal Processing Letters, 1995, 2(9):179-182
- Imran Ali, Doug Nyun Kim and Taikyeong Ted Jeong . A new subspace tracking algorithm using approximation of Gram-Schmidt procedure . In: 2009 International Conference on Information and Multimedia Technology, 2009, 245-248
- Yingbo Hua, Yong Xiang, Tianping Chen and so on . A new look at the power method for fast subspace tracking [J]. Digital Signal Processing, 1999,9:297-314
- Yingbo Hua, Yong Xiang, Tiangping Chen, Karim Abedmeraim et al . Natural power method for fast subspace tracking . In:Proceeding of the 1999 IEEE Signal Processing Society Workshop, Neural Networks for Signal Processing, 1999, 176-185
- Roland Badeau, Bertrand David and Gael Richard . Fast approximated power iteration subspace tracking[J] . IEEE Transactions on Signal Processing, 2005, 53(8):2391-2341
- Yongfeng Miao and Yingbo Hua . Fast Subspace Tracking by a Novel Information Criterion . Signals, Systems and Computer, the Thirty-First Asilomar Conference, 1997, vol2:1312-1316
- Yongfeng Miao and Yingbo Hua . Fast Subspace Tracking and Neural Network Learing by a Novel Information Criterion . IEEE Transactions on Signal Processing, 1998,46(7):1967-1979
- Amir Valizadeh, Mehdi Farrokhrooz and Ali Rafiei . Fast Signal Subspace Tracking Using Two-Layer Linear Neural Network Learning. 16th Mediterranean Conference on Control and Automation . France, 2008:1828-1832
- E Esmailzadeh and M Ghorashi . Vibraton analysis of beams traversed by uniform partially distributed moving masses[J] . Journal of Sound and Vibration, 1995, 184(1):9-17
