Физико-технические основы диагностики магистральных трубопроводов методом радиолокации

Автор: Шайдуров Г. Я., Меренков М. Г., Шайдуров Р. Г., Майков О. А., Кохонькова Е. А.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Математическое моделирование. Численный эксперимент
Статья в выпуске: 6 т.17, 2024 года.
Бесплатный доступ
Рассматривается актуальная проблема обнаружения дефектов трубопроводов с борта беспилотных летательных аппаратов, позволяющая оперативно оценивать состояние сварных швов, появление утечек углеводородов, нарушение изоляции, местоположения несанкционированных врезок и геопозиционирования трубопровода в подземном пространстве. Исследуется состояние трубопроводов: пространственное положение, утечка продукта, состояние сварных швов и изоляции, наличие и место несанкционированных врезов; дается количественная оценка чувствительности радиолокационного метода дистанционной дефектоскопии с борта беспилотного летательного аппарата (БПЛА).
Трубопровод, дефекты, радиолокация, беспилотный аппарат, сварные швы, изоляция, несанкционированные врезки, вибрация, собственные частоты
Короткий адрес: https://sciup.org/146282894
IDR: 146282894 | УДК: 621.396.96
Physico-technical basics of diagnostics of main pipelines by radar method
The article considers the current problem of pipeline defect detection using unmanned aerial vehicles, which allows for prompt assessment of the condition of welds, hydrocarbon leaks, insulation failure, locations of unauthorized cuts and geo-positioning of the pipeline in the underground space. The following are examined the condition of pipelines: spatial position, product leakage, condition of welds and insulation, presence and location of unauthorized incuts; a quantitative assessment of the sensitivity of the radar method of remote flaw detection from on board an unmanned aerial vehicle (UAV) is given.
Текст научной статьи Физико-технические основы диагностики магистральных трубопроводов методом радиолокации
Цитирование: Шайдуров Г. Я. Физико-технические основы диагностики магистральных трубопроводов методом радиолокации / Г. Я. Шайдуров, М. Г. Меренков, Р. Г. Шайдуров, О. А. Майков, Е. А. Кохонькова // Журн. Сиб. федер. ун-та. Техника и технологии, 2024, 17(6). С. 802–813. EDN: XVPKLU стенок трубы. К информационным параметрам относятся дефекты стенки и сварных швов, состояние изоляции, несанкционированные врезки, линия и глубина положения трубопровода.
Характеристика частотного спектра вибраций трубопровода
Собственные частоты колебаний замкнутой цилиндрической оболочки, загруженной внутренним и внешним давлением при фиксации концевых сечений трубы, можно определить с помощью уравнения [4]
2 E g h2X^ + m4(m — l)(m2 — 1 + Px~) mn y2 АД hx + m4 + m2
h hx = —, —;
й/щТ^Т2) (1)
_ R
Px ~ Eh h2’ hnR R
Здесь m, n – волновые числа в окружённом и продольных направлениях; h – толщина стенки трубы; Е – модуль упругости; γ – удельный вес; g – ускорение силы тяжести; Po – внутреннее давление в трубе; v – коэффициент Пуассона; hx – параметр относительной толщины оболочки; R – радиус трубы; L – длина отрезка трубы.
С учетом внутреннего потока жидкости
2 A„ + m4(m - l)(m2 - 1 + Px) + Mnn u2hx A.2 mn R h Px (h^ hx + m4 + m2) — M^in r2
где ^m n – присоединенная масса жидкости в трубе a _ ^m ^° . i _ h it R
Im (λ о ) – модифицированная функция.
По расчетам [5] частота собственных колебаний стального безнапорного трубопровода длиной L = 8 R при диаметре 1220 мм и толщине 25 мм оценивается как ⁓140 Гц.
Математическое моделирование трубопровода с внутренним потоком нефти через уравнение Навье-Стокса дало оценку собственной частоты вибрации отрезка трубопровода длиной 10 м и диаметром 1 м в районе 400 Гц.
Однако моделирование неоднородностей в стенке трубы в виде небольшого отверстия диаметром 2 мм и надрезов показало смещение этих частот на 2÷4 Гц, которое трудно диагностировать дистанционно.
По этой причине за основу такой диагностики целесообразно положить вибрации трубы за счет истечения жидкости или газа под высоким давлением порядка 80 атм.
В этом случае приближенно можно оценивать частоту вибрации, определяемую давлением, скоростью истечения продукта и диаметром отверстия D. В районе отверстия создается зона Френеля с длиной волны порядка λ a ≈ 2D.
Если представить дефект в виде отверстия в районе шва диаметром 10 мм, то частота вибрации, вызванной истечением струи продукта, определяется как
К 1500
F = ^ = -——— = 75 кГц. 2D 2 X IO”2
Здесь V з – скорость звука в нефти.
При истечении газа эта частота снизится до 15 кГц.
Поскольку это приближенная оценка, то необходим прямой эксперимент на действующем трубопроводе.
По данным математического моделирования амплитуда вибрации у поверхности трубопровода может составлять Δh = 2,5÷5 мкм.
При облучении радиоволной отраженный радиосигнал будет модулирован по фазе на величину
Ml
^ = 24y- где f – рабочая частота, v – скорость распространения радиоволн в грунте.
Так, при f = 300 МГц; v = 108 м/с; Δh = 10–5 м; Δ φ = 2 × 10–4 рад.
При фазовом измерении цифровым методом точность оценки фазы определяется как [6]:
где q – отношение сигнал/шум на входе приемника по мощности; Δ f – полоса пропускания; T н – время наблюдения.
Из (2) требуемое отношение сигнал/шум
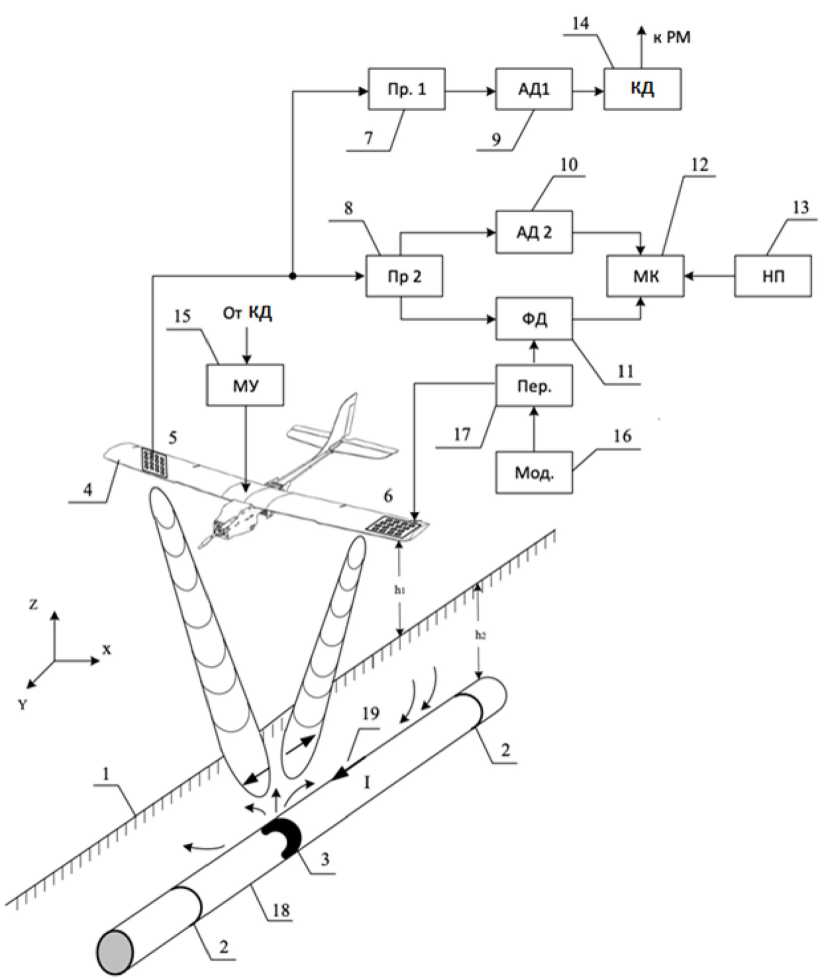
Рис. 1. Схема реализации системы дистанционной диагностики с использованием БПЛА самолетного типа
Fig. 1. Implementation scheme of a remote diagnostics system using an aircraft-type UAV онный приемник; 14 – кодер; 15 – модуль управления БПЛА, 16 – модулятор; 17 – передатчик; 18 – трубопровод.
Антенны вида фазированных антенных решеток (ФАР) из полуволновых вибраторов размещены на крыльях аппарата. Для снижения влияния излучения передатчика на приемник передающая и приемная ФАР размещены по разным крыльям. Выход приемника подключен через амплитудный и фазовый детектор к микроконтроллеру, обеспечивающему цифровую обработку поступающей информации и запоминание времени и координаты обнаруженного дефекта.
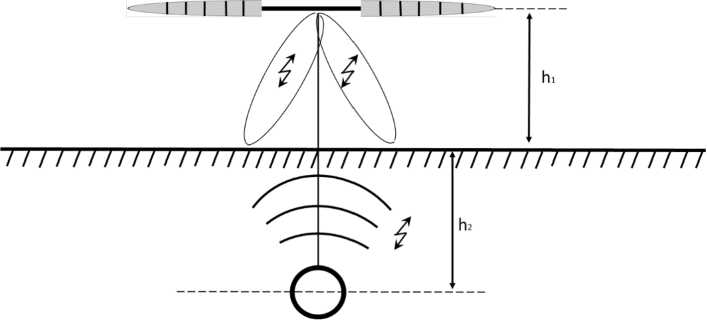
Рис. 2
Fig. 2
Для геопозиционирования передающая ФАР должна содержать в каждом её элементе два разнесенных между собой вибратора [7].
Передатчик радиометра излучает радиосигнал с поочередной коммутацией этих вибраторов.
Это создает в пространстве двухлучевую диаграмму направленности относительно оси положения трубопровода. Лишь на оси равносигнальной зоны амплитуды радиосигналов одинаковы, и любое смещение в сторону приведет к изменению соотношения амплитуд отраженных радиосигналов. Таким образом, вертикальные рули БПЛА направляют его полет вдоль оси положения трубопровода.
Амплитуда отраженного радиосигнала описывается как:
U(t) = Um eJ^M±FB)t sin(2nFk + (pk~), (7)
где ω = 2π f – радиальная частота; F в – частота вибраций трубы; Fk – частота коммутации.
После детектирования амплитудным демодулятором полосовой фильтр выделяет сигнал частоты коммутации Fk .
Глубина положения определяется через фазу сигнала этой частоты
Vk = My + d- (8)
где С – скорость распространения радиоволн в воздухе, v г – скорость распространения радиоволн в грунте.
При импульсной модуляции радиосигнала первый член этого уравнения определяется по запаздыванию радиосигнала в воздухе, а второй – по разности фаз, отраженных от трубы радиосигнала на частоте коммутации.
Частота коммутации определяется условием
4 = - > 2(4 + 4) , позволяющим снять неоднозначность фазовых измерений.
Так, при h 1 + h 2 = 21,5 м; λ k > 40 м, что соответствует частоте коммутации
-
3 IO8
-
4 = -^ «----« 10 МГц.
fe 4 40 4
Измеряемый фазовый сдвиг оценивается как:
(Pk = 4я 107 — ^ 1,9 рад ^ 114°.
Погрешность измерений глубины положения трубы определяется из уравнения
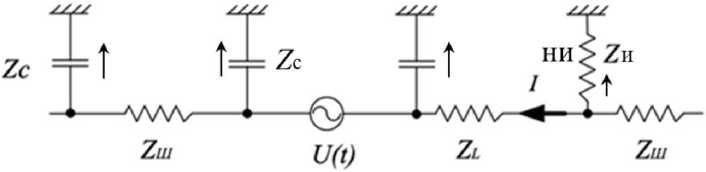
A 2nFk —. (10) Если принять оценку фазовых измерений в 1° (1/57 рад), то получим: Ah = ±0,03 м Более высокую величину погрешности даст учет вариаций скорости РРВ, зависящий от электропроводности грунта 4 = 1= , где £ « 5 ^ 10 – относительная диэлектрическая проницаемость в грунте. В этих пределах будет изменяться погрешность измерения высоты полета БПЛА. На рис. 3 изображена схема формирования отраженной от трубопровода электромагнитной волны РЛС, где: 18 – трубопровод; 22 – стенка трубы толщиной d; 19 – скин-слой ЭМ волны толщиной δ; 2 – сварные швы; 3 – нарушение изоляции; 20 – наведенный ток; 23 – поле передатчика; 21 – вытекающий ток через нарушенную изоляцию. На рис. 4 показана эквивалентная электрическая схема формирования тока в стенках трубы, наведенного электромагнитной волной РЛС, где: U(t) – наведенная в стенке трубы ЭДС; I – наведенный в трубе ток; ZШ и ZL соответственно электрическое сопротивление дефективного шва и скин-слоя электромагнитной волны в стенке трубы;Zc= —– ёмкостное сопротивле- ние изолирующей оболочки; НИ – место нарушения изоляции; ZИ – сопротивление изоляции. Физической основой метода является возбуждение продольного тока I в стенке трубы на глубине скин-слоя электромагнитной волны, излучаемой продольным широкополосным вибратором 6. Наведенный ток через емкость, образуемую стенкой трубы и изоляции, замыкается на грунт. Амплитуда этого тока определяется электрическим сопротивлением двух соседних сварных швов 2, и при нарушении их прочности это сопротивление существенно нарастает, – 808 – Рис. 3. Схема формирования отраженной от трубопровода электромагнитной волны РЛС Fig. 3. Schematic diagram of the formation of an electromagnetic wave reflected from a pipeline by a radar Рис. 4. Эквивалентная электрическая схема формирования тока в стенках трубы, наведенного электромагнитной волной РЛС Fig. 4. Equivalent electrical circuit for the formation of current in the walls of a pipe induced by an electromagnetic wave of a radar амплитуда принимаемого сигнала на входе приемника падает и смещается фаза. По появлению этого минимума микроконтроллер 12 регистрирует дефект, а результат его запоминается во флэш-память. При нарушении изоляции 3 через место контакта трубы с окружающим грунтом начинает вытекать ток, электромагнитное поле которого наводит ЭДС в поперечном приемном вибраторе 5, сигнал которого через приемник 8 поступает на второй амплитудный детектор 10 и фазовый детектор 11. Результат цифровой обработки в микроконтроллере 12 запоминается в бортовой флэш-памяти. Точка положения БПЛА в пространстве регистрируется бортовым навигационным приемником 13. Линия положения трубопровода определяется производной по времени огибающей группы сигналов. Линейный ток в стенках трубы, наведенный передающей антенной 5, распространяется в скин-слое электромагнитной волны глубиной где f – рабочая частота РЛС, σ – электропроводность материала трубы, μ – магнитная проницаемость материала трубы. Наведенный в стенках трубы ток определяется как: L 2nRLe где: ZL — – продольное электрическое сопротивление скин-слоя; CE = – суммар- 2nR6o d I 1 – тол- ^Ro ная емкость между стенками трубы и грунтом; d – толщина изоляции трубы; 6 = щина скин-слоя; σ – электропроводность железа; S - S X s0 – диэлектрическая проницаемость 1 - изоляции; £0 =77“ 10 -; P = P * Ho – диэлектрическая и магнитная проницаемость изо-ЗСп м ляции; д0 = 4nl0 7—. м 87Сим При величинах L=10 м; f = 3 × 108 Гц; к = 10; σ = 107 глубина скин-слоя составит м δ = 5 мкм, а продольное электросопротивление (ЭС) ZL = 6 × 10–3Ом. 7 Сим Если принять что ЭС сварного шва не отличается от ЭС железа, принятого как σ = 107 , м то при толщине шва а = 10–2 м его ЭС составит ZШ = 4 × 10–3 Ом. Емкостное сопротивление утечки тока на грунт через изоляцию трубы оценивается ZC = 1,5 × 10–3 Ом при общей емкости CE = 0,3 мкФ. Фазовый сдвиг наведенного в трубе тока определяется как: 5^ 22ш + ZL Изменение соотношения ZШ/ZL в результате деформации сварного шва отразится как по амплитуде, так и по фазе отраженной электромагнитной волны, а повреждение изоляции изменяет скачком параметр емкостного сопротивления ZC. Поскольку диаграмма направленности излучающей антенны имеет косинусоидальную форму и максимум амплитуды отраженного радиосигнала U(t) точно соответствует положению БПЛА над осью трубопровода, то любое отклонение влево или вправо приведет к ее уменьшению. По этой причине ось трубопровода отмечается минимумом производной радиосигнала dU(t) на участке между двумя точками положения. Бортовой микроконтроллер отметит эти изменения и внесет корректировку полета БПЛА. Наведенная в трубе ЭДС от излучения бортового передатчика РЛС оценивается через уравнение: Pr ат е аК'2 р =___________ где: P1 – мощность излучения РЛС; P2 – мощность сигнала РЛС, падающего на отрезок трубы длиной между сварными швами; σT = 2πRL – эффективная поверхность рассеивания трубы; ^2=VW– напряженность электромагнитного поля у поверхности трубы; Волновое сопротивление грунта: wr = -p== h = p = узол^. ЭДС, наведенная сигналом РЛС на стенки трубы: u(t) = E2(t)L; 4л h2 – коэффициент поглощения электромагнитной волны в окружающем грунте; – длина электромагнитной волны; И = ^ – скорость электромагнитной волны в грун- те; σГ – проводимость грунта; μ – магнитная проницаемость грунта; h2 – глубина положения трубы. На выходе РЛС мощность отраженного от трубы радиосигнала составит: , = ProT e~^SAQ 3 16^2(/i! + h2y Требуемая мощность излучения передатчика составит: Pi 16дРшя2(Л1 + h2)4e4afl2 °t ^a Q Здесь: Q = 4k — – коэффициент направленности действия полуволнового вибратора передающей антенны; σT – эффективная поверхность рассеивания радиоволны цилиндром трубы; рш = PT^f – мощность шума на входе приемника; k = 1,38 × 10–23 Дж/К – постоянная Больцмана; Pk =3000 К – температура шумов; SA – эффективная площадь антенны. Требуемое отношение сигнал/шум на входе приёмника определяется погрешностью измерения фазового сдвига, отражённого от трубы [6] _ 1 q ="^' где: hep = 2л/— (рад); f – несущая частота РЛС; δ – минимально регистрируемая амплитуда C вибрации; Cr = ^ – скорость распространения радиоволн в грунте; εГ – диэлектрическая проницаемость в грунте; C – скорость света. Принимая для численных расчётов следующие параметры: R = 0,5 м; f = 300 МГц; λ = 1 м; SA = 0,25 м2; Δf = 104 Гц; σT = 5 м2; ; e4αh2= 387; –5 4 h1 = 20 м; h2 = 1,5 м; Q = 3,14; δ = 10 мкм = 10–5 м; εГ = 9; Δφ = 2 × 104 рид, получим из (17) P1 = 0,4 Вт. Эта оценка мощности передатчика дана для узкополосного режима измерений [7]. Для электромагнитной развязки приемника РЛС возможна импульсная модуляция излучаемого радиосигнала в виде последовательности видеоимпульсов с длительностью τи = 3 мс и периодом повторения T = 200 мс, либо радиоимпульсов, вмещающих по времени 10 периодов несущей частоты, т.е. τи = 30 мс. Импульсная мощность передатчика в случае излучения видеоимпульса увеличится в 104 раз соответствующего спектральной линии 300 МГц. Р1И = 4 кВт. Диагностические параметры содержатся в радиосигнале, поступающем на вход приемника РЛС с мощностью: El Р = — 3 IV H3(t) = E2(t)Le2ah^ _ El где Ез – напряженность электрического поля в районе приемника РЛС, которая может быть определена через напряженность магнитного поля Hз(t), наведенного в трубе тока, где W = 377 Ом – волновое сопротивление воздуха. Если за счет дефекта сварного шва его электрическое сопротивление ZШ становится много больше величин ZL и ZC, то амплитуда отраженного от трубы сигнала и его фазовый сдвиг t9v _ uCZ, будут нести информацию о качестве шва. При нарушении изоляции через место повреждения возникнут токи утечки, ортогональные оси трубы. Это будет отмечено появлением на поперечном вибраторе приемной антенны параметров соответствующего сигнала, амплитуда и фаза которого дадут информацию о повреждении изоляции. Преимуществами заявленного способа перед внутритрубной дефектоскопией являются: 1. Высокая дальность и скорость обследования; 2. Низкая трудоемкость и скорость работ; 3. Получение дополнительных информационных параметров – повреждение изоляции и контроль линии положения трубопровода в пространстве. Ожидаемые характеристики системы дефектоскопии: 1. БПЛА самолетного типа с грузоподъемностью около 3 кг; 2. Высота полета 10–20 м; 3. Рабочая частота РЛС 300 МГц; 4. Мощность передатчика ˂1Вт. Выводы 1. Дистанционная радиолокационная диагностика магистральных трубопроводов с использованием беспилотных летательных аппаратов позволяет оперативно производить кон- 2. Для практического использования необходимо проведение экспериментальных работ на действующих магистралях.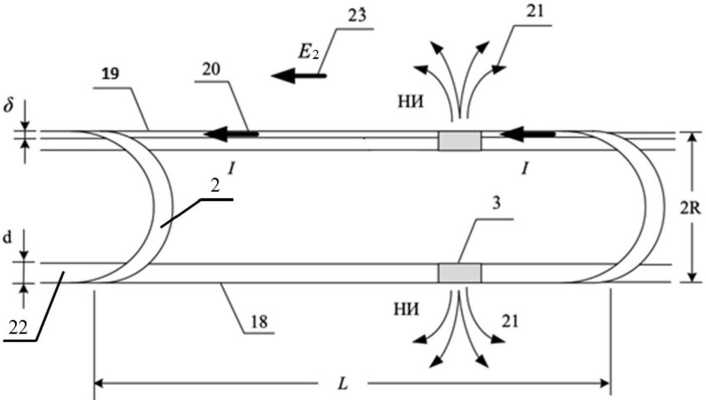

Список литературы Физико-технические основы диагностики магистральных трубопроводов методом радиолокации
- Многосекционный внутритрубный магнитный дефектоскоп. Патент РФ № 117186 от 20.06.2012.
- Устройство внутритрубной дефектоскопии. Патент РФ № 161019 от 10.04.2016.
- Магнитный дефектоскоп для наружного контроля труб большого диаметра. Патент РФ № 75750 от 20.08.2008.
- Дмитриев А. В., Соколов В. Г., Березнёв А. В. Исследование параметра длины и продольной сжимающей силы по определению частот свободных колебаний подземных тонкостенных газопроводов большого диаметра. Интернет-журнал «Транспортные сооружения», 2019, 3, https://t-s.today/PDF/40SATS 319.pdf (доступ свободный). Загл. с экрана. Яз. рус., англ. DOI: 10.15862/40SATS 319.
- Дмитриев А. В. Исследование частоты свободных колебаний для трубопроводов с различными физико-механическими свойствами материала. Интернет-журнал «Транспортные сооружения», 2020, 1, https://t-s.today/PDF/04SATS 120.pdf (доступ свободный). Загл. с экрана. Яз. рус., англ. DOI:10.15862/04SATS 120.
- Чмых М. К. Цифровая фазометрия. М.: Радиосвязь. 1993. 184.
- Шайдуров Г. Я. Способ радиолокации Патент РФ № 2797828 от 27.07.2022.
