Формирование цифровых двойников объектов автоматического управления с использованием нейронных сетей в процессах холодной сушки рыбы

Автор: Вотинов М. В., Ершов М. А.
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Электротехника. Транспорт
Статья в выпуске: 4 т.25, 2022 года.
Бесплатный доступ
В работе рассматривается применение нейронных сетей при построении цифрового двойника технологического процесса. Представлено исследование, целью которого является обработка накопленных системой автоматического управления малогабаритной сушильной установки данных о протекающих на ней в течение последнего времени технологических процессах, обучение на их основе нейронной сети и формирование цифровой (нейросетевой) модели изменения температуры в термокамере. Используются элементы машинного обучения с привлечением многослойной нейронной сети прямого распространения. Применяется метод обратного распространения ошибки, при котором величина ошибки выходного нейрона проецируется на все веса всех нейронов сети, начиная от выходного и заканчивая весами нейронов входного слоя. В процессе обучения на сеть поступала информация о мощности работы исполнительных механизмов установки и изменяющейся во времени температуре в термокамере. По завершению обучения сформировалось состояние нейронной сети, представляющее собой цифровую модель изменения температуры в термокамере малогабаритной сушильной установки. Полученная с помощью нейронной сети модель (цифровой двойник) показала корреляцию экспериментальным данным со средней абсолютной процентной ошибкой, не превышающей 3 %. Таким образом, поведение нейросетевой модели адекватно реальному объекту. Дальнейшие исследования в сфере формирования цифрового двойника технологического объекта (учет в модели дополнительных параметров, формирование на основе модели нейрорегулятора) необходимы и планируются авторами.
Нейронная сеть, управление, тепловые процессы, цифровой двойник
Короткий адрес: https://sciup.org/142235516
IDR: 142235516 | УДК: 681.53 | DOI: 10.21443/1560-9278-2022-25-4-291-297
Текст статьи Формирование цифровых двойников объектов автоматического управления с использованием нейронных сетей в процессах холодной сушки рыбы
Мурманский государственный технический университет, г. Мурманск, Россия; e-mail: , ORCID:
Вотинов М. В. и др. Формирование цифровых двойников объектов автоматического управления с использованием нейронных сетей в процессах холодной сушки рыбы. Вестник МГТУ. 2022. Т. 25, № 4. С. 291–297. DOI:
e-mail: , ORCID:
Votinov, M. V. et al. 2022. Formation of digital counterparts of automatic control objects using neural networks in cold fish drying processes. Vestnik of MSTU, 25(4), pp. 291–297. (In Russ.) DOI:
Становление и популяризация таких направлений, как робототехника, технология блокчейн и интернет вещей, стали возможными благодаря современному развитию процессов цифровой трансформации общества, экономики, бизнеса и промышленности. Предшествующие цифровой трансформации цифровизация и информатизация общества ( Votinova et al., 2019 ) способствовали тому, что практически все действия в современном информационном мире оставляют свой цифровой след в виде необработанных массивов данных. Таким образом, сегодня данные являются основой цифровой трансформации, обработка которых обеспечивает формирование новых эффективных моделей процессов и систем. Развитие цифровых двойников объектов позволит принимать широкий сектор управленческих решений не только в общественных процессах, но и на уровне систем автоматического управления технологическими процессами и производствами.
С обработкой больших данных успешно справляются системы машинного обучения ( Манжула и др. 2011; Xianjun et al., 2008 ), выполненные преимущественно на базе нейронных сетей. Доказано, что нейронные сети уверенно решают такие классы задач, как предсказание, распознавание, кластеризация и аппроксимация ( Zhao et al., 2016 ).
В Мурманском государственном техническом университете одним из направлений научной деятельности является совершенствование процессов тепловой обработки гидробионтов. Исследовательские цеха оборудованы большим количеством технологического оборудования, среди которого автоклавы, коптильные и сушильные установки. Объединяет эти установки то, что они работают с помощью современных систем автоматического управления. Как следствие, на протяжении длительного времени в процессе своей деятельности эти установки оставляли свой цифровой след в виде log-файлов и баз данных.
Одной из таких установок является малогабаритная сушильная установка ( Вотинов, 2013 ), используемая для проведения технологических процессов сушки, вяления, тепловой обработки рыбного сырья. Система автоматического управления установкой выполнена на базе оборудования отечественного производителя систем автоматики фирмы "ОВЕН". В составе установки действует программный комплекс, который в процессе своей деятельности ведет архивирование данных, содержащих количественную и качественную информацию о протекающем технологическом процессе. Только за последний год собрано несколько гигабайт сжатой информации. В частности, логируются такие параметры, как время работы, текущая мощность исполнительных механизмов, температура в термокамере, влажность воздуха и так далее.
Контур управления температурой в термокамере концептуально выполнен на базе ПИД регулятора, настройка которого выполнялась классическим методом. Для идентификации объекта управления была определена передаточная функция изменения температуры в термокамере по методике доктора технических наук А. В. Нетушила. Безусловно, передаточная функция позволяет представить изменение температуры в термокамере малогабаритной сушильной установки в качестве модели объекта управления и произвести настройку регулятора на оптимальный режим работы. Однако сама модель создается по большом счету экспертным путем, с присущим ему человеческим фактором. В этой связи актуальным представляется получение цифрового двойника малогабаритной сушильной установки с привлечением алгоритмов машинного обучения и обработки.
Целью работы является обработка накопленных системой автоматического управления данных о протекающих на ней в течение последнего времени технологических процессах, обучение на их основе нейронной сети и, как следствие, формирование цифровой (нейросетевой) модели изменения температуры в термокамере малогабаритной сушильной установки.
Материалы и методы
Для достижения поставленной в работе цели была выбрана разработанная ранее и хорошо зарекомендовавшая себя в процессах прогнозированная информации нейронная сеть Нейростат ( Votinov et al., 2020 ).
Нейростат представляет собой классическую многослойную нейронную сеть прямого распространения, общий вид которой представлен на рис. 1.
Нейронная сеть характеризуется нейронами входного (X), скрытого (N) и выходного (Y) слоя. Количество нейронов входного слоя определяется количеством поступающих на нейронную сеть извне параметров. Количество нейронов выходного слоя определяется теми целями и задачами, на выполнение которых направлена нейронная сеть.
Структура скрытого слоя нейронной сети характеризуется количеством скрытых слоев и количеством нейронов в каждом слое. Определение структуры скрытого слоя – отдельная задача, не стоящая в рамках данной работы. Известно, что малое количество нейронов приводит к большой ошибке выходного слоя, в свою очередь большое количество нейронов делает нейронную сеть нестабильной. Исследования, проводимые в области прогнозирования информации (Votinov et al., 2020), показали, что для нормальной работы нейронной сети достаточно порядка 50 нейронов каждого скрытого слоя. Экспериментальные исследования авторов показали достаточность организации скрытой структуры в три слоя.
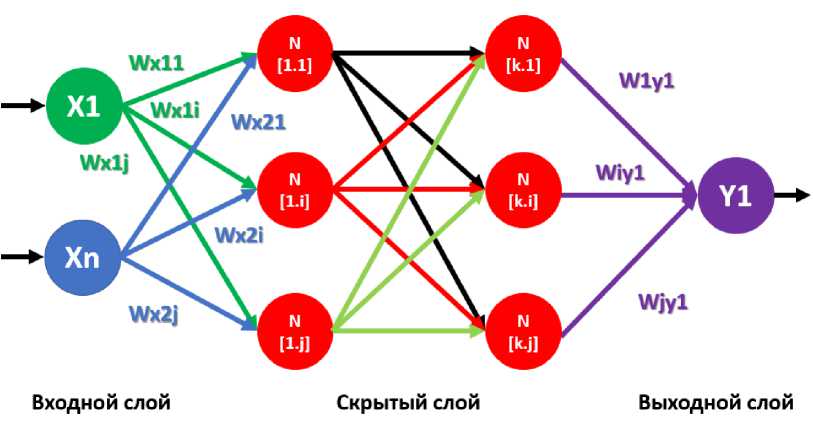
Рис. 1. Классическая структура многослойной нейронной сети Fig. 1. Classical structure of a multilayer neural network
Нейроны каждого слоя связаны друг с другом, каждая связь – синапс (W) – имеет свой вес по принципу математического графа. В основе каждого нейрона лежит математическая функция активации, обычно принимающая значения в диапазонах [–1,1] или [0,1]. В нейронной сети "Нейрстат" используется функция активации вида сигмоид.
Главное отличие нейронной сети от обычных традиционных алгоритмов программирования заключается в возможности ее обучения ( Брестер и др., 2017 ). В процессе обучения осуществляется определение весов связей нейронов с соседними нейронами. В работе применяется метод обратного распространения ошибки, при котором величина ошибки выходного нейрона проецируется на все веса всех нейронов сети, начиная от выходного и заканчивая весами нейронов входного слоя.
В результате обучения сеть способна выдавать результаты на наборе данных даже таких, которых изначально не было в обучающей выборке. Эта особенность очень полезна и для систем автоматического управления, управляющее воздействие которых зачастую формируется на основе зашумленной входной информации с датчиков и исполнительных механизмов системы.
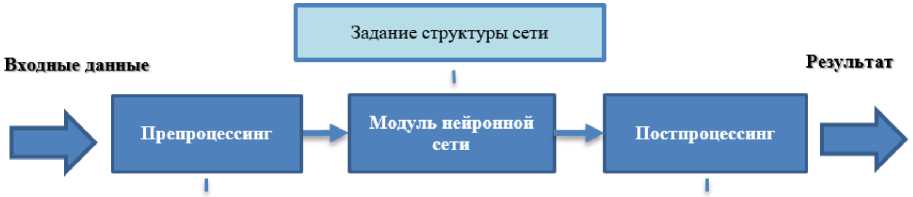
Технология обработки данных нейронной сетью "Нейростат" приведена на рис. 2. Ввиду малого диапазона выходных значений функции активации вся поступающая на нейроны входного слоя информация должна быть нормирована ( Поляхов и др., 2016 ) на стадии препроцессинга и соответственно приведена в понимаемый пользователем вид на стадии поспроцессинга.
'''Приведение данных от нормализованного вида к исходному «'Интерпретация результатов v' Приведение данных к нормализованному виду по методу «минимакс»
V Формирование обучающего DataSet
Рис. 2. Технология обработки данных нейронной сетью "Нейростат"
Fig. 2. The technology of data processing by the neural network "Neurostat"
Результаты и обсуждение
Для формирования цифрового двойника малогабаритной сушильной установки по температурному контуру были взяты формируемые ее системой автоматического управления архивированные данные о мощности работы ТЭН и изменяющейся во времени температуре в следующем виде:
|
Техн. процесс, номер |
Время работы, сек |
Мощность ТЭН, % |
Температура в термокамере, °С |
|
Номер |
t |
P |
T кам |
В общей сложности это составило более 1 600 000 строк данных по более 20 процессам. Из полученного множества данных сформировался обучающий датасет. В соответствии с теорией управления обучающий датасет формировался по подобию матрицы Якоби, который содержит в себе вектора предыдущих состояний объекта управления (табл.). Экспериментально было определено, что оптимальными являются три последних вектора.
Таблица. Структура обучающей выборки Table. The structure of the training sample
|
Входные ней |
роны |
Выходной нейрон |
|||||
|
Нейрон 1 |
Нейрон 2 |
Нейрон 3 |
Нейрон 4 |
Нейрон 5 |
Нейрон 6 |
Нейрон 7 |
Нейрон 1 |
|
P i –3 |
P i –2 |
P i –1 |
P i |
T i –3 |
T i –2 |
T i –1 |
T i |
|
Текущее и предыдущие значения мощности, подаваемой на ТЭН |
Текущее и предыдущие значения температуры в термокамере |
||||||
Соответственно нейронная сеть получила семь нейронов входного слоя, которые описывали предыдущие состояния мощности, подаваемой на исполнительные механизмы, а также значения температуры в термокамере малогабаритной сушильной установки.
Обучение нейронной сети проводилось на обычном персональном компьютере (Intel CoreI7 4710HQ, x64, DDR3 8 ГБ). При этом какие-либо серверные высокопроизводительные платформы не были задействованы.
В процессе обучения нейронная сеть сопоставляла входные данные с выходными, определяя между ними корреляционную связь и получая оптимальные веса соответствующих синапсов. В результате за период времени порядка 45 минут нейронная сеть завершила обучение, т. е. определила веса синапсов нейронов таким образом, при котором для всего обучающего датасет ошибка выхода не превышает 0,01 в нормализованном виде. Таким образом, сформировалось состояние нейронной сети, представляющее собой цифровую модель изменения температуры в термокамере малогабаритной сушильной установки.
Для определения адекватности полученной модели был проведен эксперимент. Выбран технологический процесс тепловой обработки рыбного сырья, который не вошел в обучающий датасет. С шагом квантования в 2 секунды – именно с таким шагом работает реальная система автоматического управления исследуемой установки – на входы цифровой модели подавались записанные параметры мощности исполнительных механизмов и параметры температуры, и отмечался результат выхода. На рис. 3 представлен график переходного процесса изменения температуры, снятый во время реального технологического процесса тепловой обработки гидробионтов. На рис. 4 представлен график изменения температуры, полученный в результате моделирования, а также график ошибки моделирования.
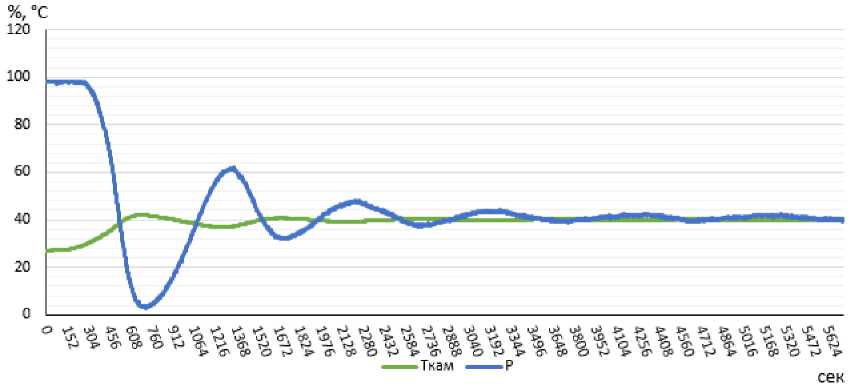
Рис. 3. График изменения температуры реального технологического процесса
Fig. 3. Graph of the temperature change of the real technological process
Начальные условия эксперимента специально не содержат уточняющую информацию: какова была заданная температура в термокамере, модель регулятора, начальная температура и т. д. Однако результаты эксперимента говорят о том, что полученная в результате обучения нейросетевая модель, основываясь на информации, поступающей на ее входы, выдавала достоверный результат со средней абсолютной процентной ошибкой MAPE (Mean Absolute Percent Error), не превышающей 3 %.
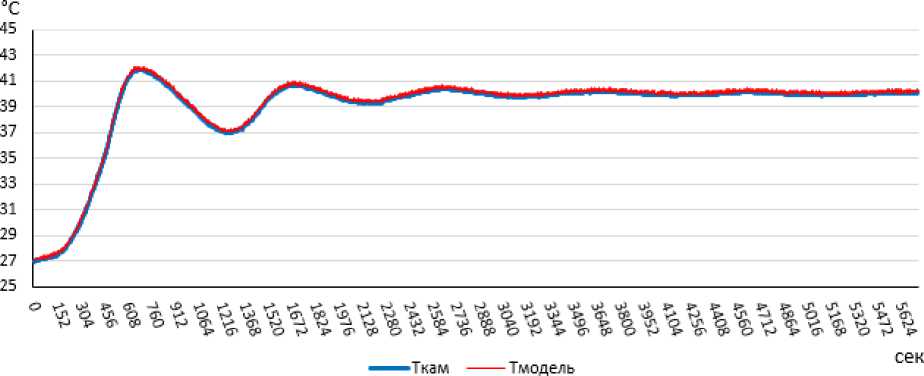
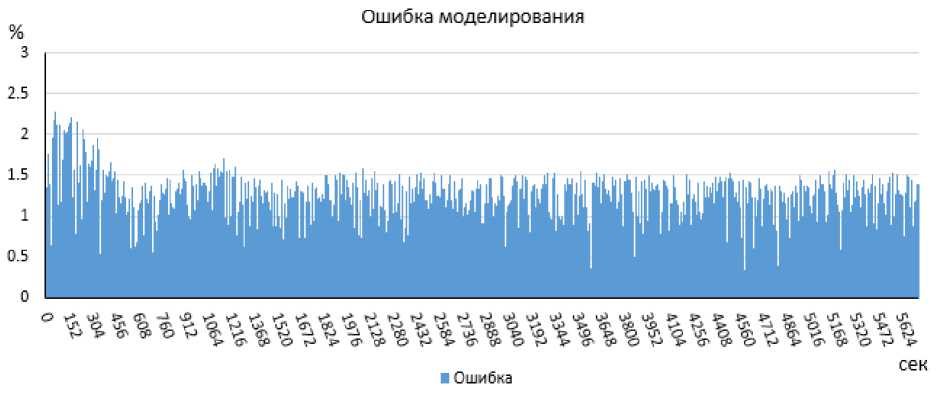
Рис. 4. Результаты моделирования
Fig. 4. Simulation results
Таким образом, поведение нейросетевой модели адекватно реальному объекту, цифровой двойник создан.
Заключение
Проведенное исследование позволило с использованием алгоритмов машинного обучения сформировать цифровой двойник процесса изменения температуры в малогабаритной сушильной установке на основе нейросетевой модели.
Сформированный обучающий датасет, основанный на накопленных системой автоматического управления больших данных о протекавших ранее на малогабаритной сушильной установке технологических процессах, позволил в результате обучения получить такие веса синапсов нейронной сети, при которых модель выдает достоверный результат с погрешностью, не превышающей 3 %.
Полученная цифровая модель является основой для разработки и дальнейшего внедрения нейросетевого регулятора вместо традиционного ПИД регулятора системы автоматического управления.
Нейросетевая модель может быть использована для исследования и моделирования новых экспериментальных режимов обработки рыбного сырья на малогабаритной сушильной установке. Безусловно, требуются дополнительные исследования по учету в модели таких параметров, как влажность в термокамере, начальная температура окружающей среды и так далее. Это является предметом дальнейших исследований авторов. Однако уже сейчас очевидно, что начатая цифровая трансформация на примере только одной малогабаритной сушильной установки дала положительный эффект, который в дальнейшем может быть спроецирован на все технологическое оборудование исследовательского цеха МГТУ.
Исследование выполнено за счет гранта Российского научного фонда № 22-26-20116, – 50 % финансирования; за счет гранта Министерства образования и науки Мурманской области (далее – Министерство) по направлению "Проведение фундаментальных научных исследований и поисковых научных исследований малыми отдельными научными группами", на основании Соглашения № 103 от 13.04.2022 г. между Министерством и Мурманским государственным техническим университетом – 50 % финансирования.
