Формирование идеальной тяговой характеристики колёсной машины и экономичной характеристики двигателя внутреннего сгорания регулированием электромеханической трансмиссии

Автор: Павловская Ольга Олеговна, Кондаков Сергей Владимирович, Носенко Лев Сергеевич
Статья в выпуске: 2 т.13, 2013 года.
Бесплатный доступ
В статье приведены результаты исследования возможностей электромеханической трансмиссии колесной машины по регулированию совместной работы двигателя внутреннего сгорания, управляемого человеком-оператором, и внешних сопротивлений, являющихся величиной случайной. Разработан алгоритм управления, обеспечивающий, с одной стороны, приближение тяговой характеристики колесной машины к идеальной гиперболе при десятикратном диапазоне изменения сопротивлений и скоростей движения, а с другой стороны - работу двигателя внутреннего сгорания по экономичной характеристике. Проведен анализ различных способов регулирования электромеханической трансмиссии, состоящей из одного общего генератора, приводимого во вращение двигателем внутреннего сгорания, и двенадцати тяговых электродвигателей, установленных на колесах, а именно: регулирование генератора, синхронное и индивидуальное регулирование тяговых электродвигателей. Предпочтение отдано синхронному регулированию всех тяговых электродвигателей. В статье приведены структурные схемы соответствующих систем регулирования.
Колесная машина, электромеханическая трансмиссия, управление
Короткий адрес: https://sciup.org/147154896
IDR: 147154896 | УДК: 681.51.013
Creating of wheel machine's ideal tractive characteristic and internal combustion engine's economic characteristic by regulation of electromechanical transmission
The results of research of wheel machine electromechanical transmission's properties for regulation of joint work of internal combustion engine, controlled by driver, and accidental size of external resistances are described. The algorithm control is worked out; it provides, on the one hand, the approximate of tractive characteristic to ideal with tenfold diapason of external resistances and drive speed and, on the other hand, the internal combustion engine's work in order to economic characteristic. The research of regulation different means of electromechanical transmission, consisting of one generator and twelve tractive electric engines, installed on wheels, namely: regulation of generator, synchronous and individual regulation of tractive electric engines is carried out. Authors give preferences to synchronous regulation of tractive electric engines. The structural schemes of corresponding regulation systems are described.
Текст научной статьи Формирование идеальной тяговой характеристики колёсной машины и экономичной характеристики двигателя внутреннего сгорания регулированием электромеханической трансмиссии
Объектом исследования является колесная машина (КМ) с электромеханической трансмиссией (ЭМТ), состоящей из одного общего генератора и 12 тяговых электрических двигателей (ТЭД), установленных непосредственно на колесах. Источником механической энергии для генератора является двигатель внутреннего сгорания (ДВС) мощностью 720 кВт.
Необходимость внешнего регулирования электромашин, работающих в составе трансмиссий транспортной техники, связана с изменением нагрузки на ТЭД вследствие переменности свойств грунта, условий движения (разгон, торможение, равномерное движение), рельефа местности [1].
Вопросами регулирования ЭМТ для различных объектов занимались научноисследовательские и инженерно-технические работники различных отечественных и зарубежных организаций, например, ЧТЗ [2] (при проектировании семейства дизель-электрических тракторов), кафедра колесных машин МГТУ им. Н.Э. Баумана [7] (при проектировании многоосных колесных машин), фирма «Магнет мотор» (при проектировании колесных и гусеничных машин с электрической трансмиссией). Однако все перечисленные работы не касаются особенностей электрического привода.
Целью работы является приближение тяговой характеристики КМ к идеальной гиперболе при десятикратном диапазоне изменения сопротивлений и скоростей движения с помощью регулирования ЭМТ.
Ограничения. ДВС образует в паре с генератором дизель-генераторную установку (ДГУ) мощностью 720 кВт, которая при полном нажатии на педаль подачи топлива (ППТ) обеспечивает постоянную частоту вращения вала ДВС на уровне 190 рад/с. При этом всережимный регулятор топливного насоса высокого давления автоматически регулирует подачу топлива при изменении сопротивления на коленчатом валу. Механическая нагрузка на коленчатый вал ДВС определяется электрической нагрузкой генератора ДГУ, которая в свою очередь определяется суммой токов в силовых (якорных) цепях 12 ТЭД. Таким образом, мощность в 720 кВт реализуется только при приведенной к ДВС нагрузке в 3800 Н·м, во всех остальных случаях потенциальная мощность ДВС реализуется частично. Добиться работы ДГУ на полную мощность (720 кВт) при полном нажатии на ППТ и любых внешних нагрузках можно только с помощью дополнительного регулирования ЭМТ. При неполном нажатии на ППТ дополнительное регулирование ЭМТ позволит минимизировать удельный расход топлива ДВС.
Таким образом, режим работы ДВС определяется с одной стороны внешней нагрузкой, а с другой – человеком, то есть в какой-то степени является случайным. Регулируя магнитный поток генератора или ТЭД, можно изменять передаточное число трансмиссии (отношение крутящего момента на ведущем колесе к крутящему моменту на коленчатом валу ДВС) так, чтобы режим работы ДВС перестал быть величиной случайной, а всегда соответствовал экономичной характеристике (кривая А на рис. 1).
Гипотеза: если правильно задавать передаточное число ЭМТ, то можно добиться работы ДВС в режиме минимального расхода топлива при каждом заданном водителем уровне мощности, по так называемой экономичной характеристике [5] (график А на рис. 1).
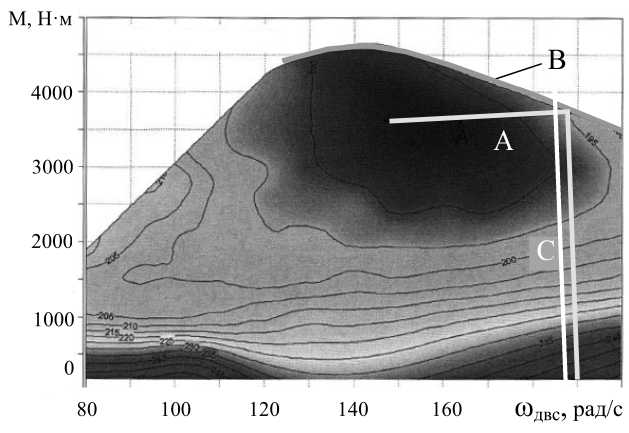
Рис. 1. Статические характеристики ДВС: зависимость момента двигателя и удельного расхода топлива от частоты вращения коленчатого вала (в том числе экономичная характеристика А, В– корректорная ветвь, С – регуляторная ветвь)
Каждый ТЭД снабжен силовым преобразователем, регулирующим характеристику ТЭД, в том числе и по гиперболе постоянной мощности, показанной на рис. 2.
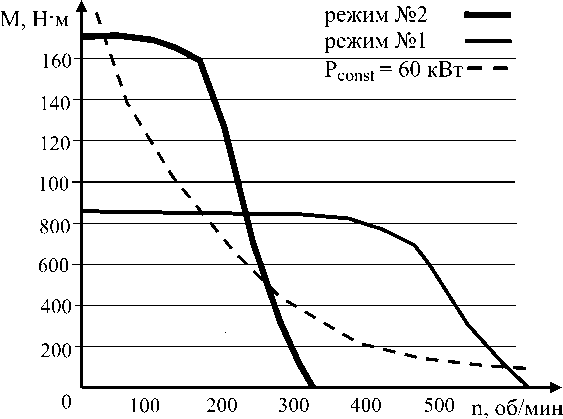
Рис. 2. Механическая характеристика ТЭД, состоящая из 2 режимов и кривой постоянной мощности
Альтернативой регулирования каждого из 12 ТЭД является регулирование генератора. В связи с этим проведено сравнение двух подходов к регулированию ЭМТ: регулирования напряжения генератора по скорости вращения вала ДВС и регулирования ТЭД по току в силовой (якорной) цепи.
-
1. Регулирование напряжения генератора . Опорный сигнал – требуемая скорость вращения вала ДВС, прямо пропорциональная ЭДС генератора, и, с небольшим искажением, напряжению, выдаваемому генератором в бортовую сеть. На основании [3], поставленная задача может быть достаточно корректно решена на базе известных уравнений для машины постоянного тока с независимым возбуждением [5]. Так, для генератора
-
2 . Синхронное регулирование всех ТЭД по току . Совсем по-другому выглядит регулирование магнитного потока ТЭД и связанного с ним К тэд формулой (2). Структурная схема регулирования ЭМТ по току всех ТЭД приведена на рис. 6. Отклонение текущего сигнала (Σ I ) от опорного сигнала (900 А) формирует магнитный поток ТЭД.
-
3. Раздельное регулирование каждого ТЭД по току . Предполагается, что при этом каждый ТЭД будет брать из сети по 60 кВт энергии и отрабатывать каждый в отдельности свою гиперболу по рис. 2. При постоянном напряжении генератора в 800 В каждая пара ТЭД одной оси должна потреблять ток на уровне 150 А, тогда мощность каждой пары будет 120 кВт. Схема моделирования автоматизированной системы (рис. 9) аналогична рис. 6, но опорный сигнал в 150 А получает каждая пара ТЭД в отдельности. Результат имитационного моделирования приведен на рис. 10. В процессе переезда на другой грунт токи ТЭД разных осей сильно отличаются друг от друга: от минус 400 А до плюс 800 А, колеса начинают противоречить друг другу, появляется циркуляция мощности между осями.
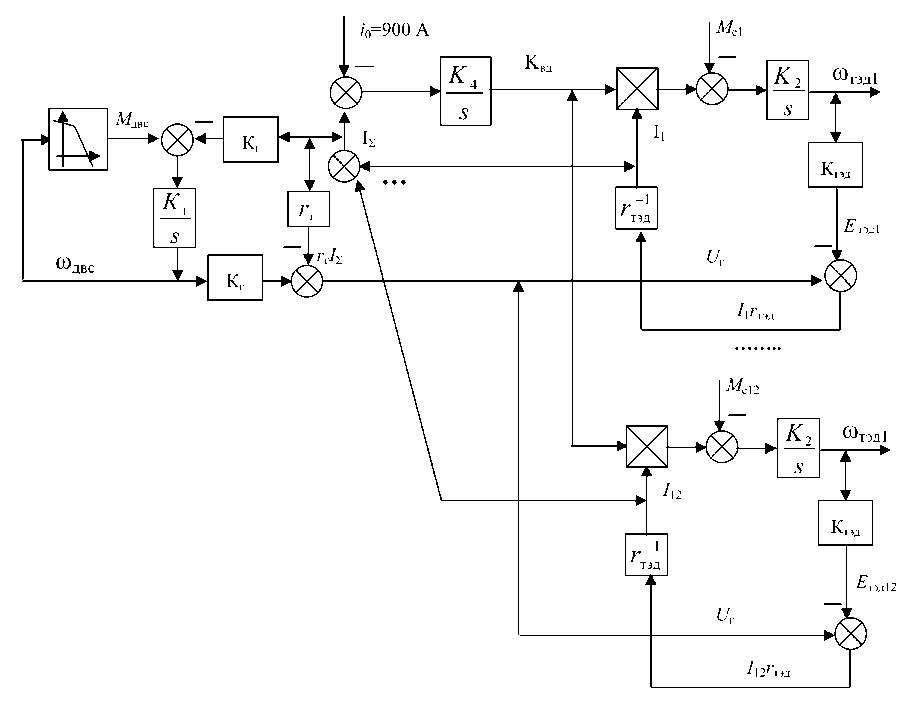
Рис. 6. Структурная схема ЭМТ при синхронном регулировании по току всех ТЭД
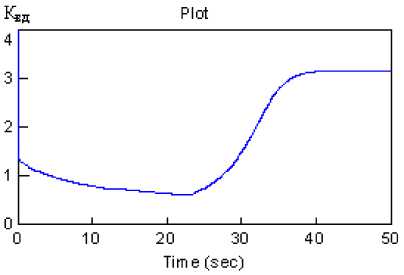
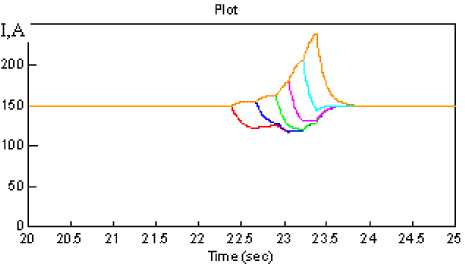
Рис. 8. Токи и ЭДС каждого из ТЭД по осям
Рис. 7. Изменение магнитного потока ТЭД
-
4. Рассмотрим результативность предложенного синхронного регулирования ЭМТ по суммарному току всех ТЭД при разгоне КМ . Этих вопросов касаются исследования ученых МГТУ им. Н.Э. Баумана [7, 8]. Способ регулирования – синхронно все двенадцать ТЭД. Условия разгона, как и на рис. 4, а: от 5,3 м/с до 10 м/с за 15 с, ускорение при этом равно 0,31 м/с2. Перераспределение нормального давления на грунт между колесами осей (в долях от единицы при равномерном движении) составляет от 0,922 на первой оси до 1,06 на последней. Токи в ТЭД соответствующих колес тоже различаются при разгоне, см. рис. 12а, от 148 А до 152 А (незначительно). Гораздо большие различия в токах ТЭД проявляются при переезде с грунта на грунт (на рис. 11, б в другом масштабе показан тот же эпизод разгона с последующим переездом на более тяжелый грунт, на котором разгон прекращается).
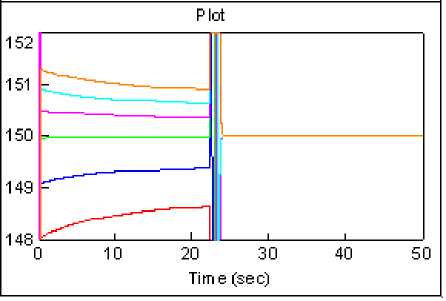
а)
Рис. 11. Токи ТЭД при разгоне (а) и при переезде на другой грунт (б)
б)
-
5. Сформулированные выше алгоритмы управления электрической трансмиссией для регулирования кинематических и силовых параметров КМ через магнитный поток ТЭД позволяют сформулировать гипотезу о возможности дополнительного управления ДВС (помимо всере-жимного центробежного регулятора подачи топлива) с целью обеспечения работы ДВС по экономичной характеристике [5].
U г = E г - Г I Г , (1) где r г – сопротивление силовой цепи генератора, Ом; U г – напряжение, выдаваемое генератором в сеть, В; E г – ЭДС генератора, В;
М г = С е Ф г I г = К г I г , (2) где М г – момент на валу генератора, Н·м, С е – постоянная для данной машины величина, Ф г – магнитный поток, Вб, I г – ток, А;
E г = Ф г С е « г , (3) где ш г - угловая скорость вращения вала генератора.
Уравнения, аналогичные (1)–(3), можно записать и для ТЭД. Регуляторная характеристика ДВС (см. рис. 1, прямая С) аппроксимирована прямой M двс = а 1 ш + Ь 1 , а корректорная (см. рис. 1, кривая В) - параболой M двс = а 2 ш 2 + b 2 ш + c 2 .
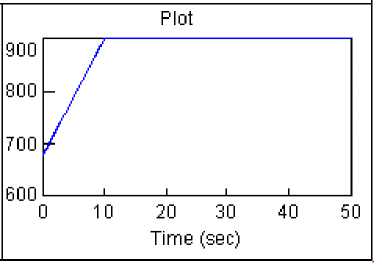
Структурная схема системы регулирования напряжения генератора U г по скорости вала ДВС представлена на рис. 3, где « 0 = 190 рад/с.
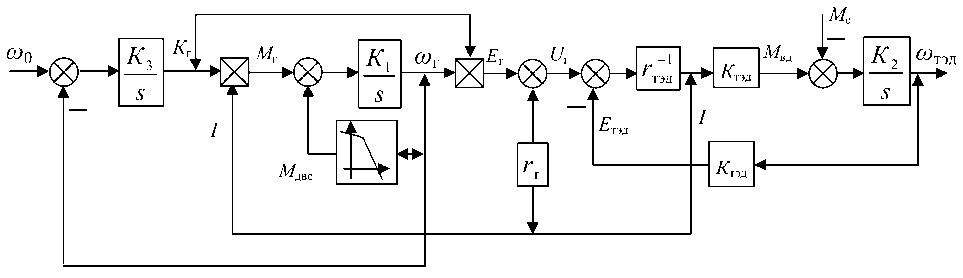
Рис. 3. Структурная схема системы регулирования напряжения генератора по скорости вала ДВС
Работоспособность данного алгоритма подтверждена в среде программирования VISSIM с использованием математической модели движения машины [4].
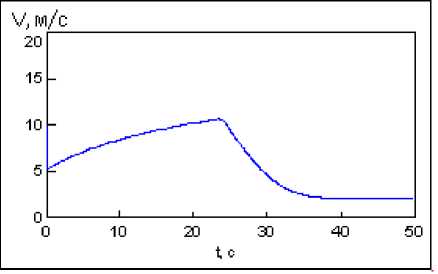
Результаты имитационного моделирования следующие. При начальной скорости движения 5 м/с за 20 секунд машина разгоняется до скорости 10 м/с, насколько позволяют достаточно небольшие сопротивления грунта, и между 22-й и 24-й секундами машина совершает переезд на другой грунт последовательно колесами всех осей, скорость снижается до 2 м/с (рис. 4, а). На рис. 4, б показан график изменения мощности ДГУ.
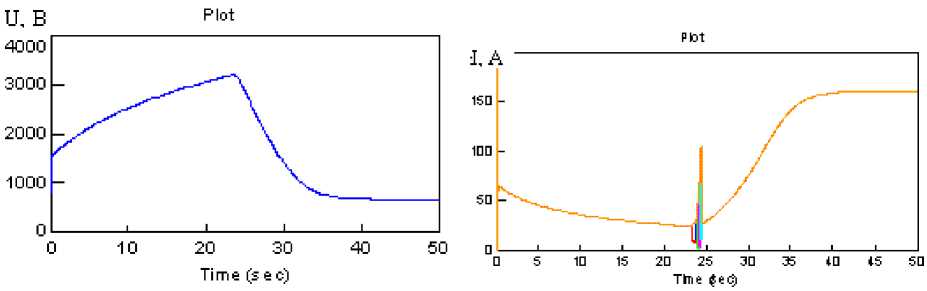
На рис. 5 приведены графики изменения тока каждого ТЭД и общее напряжение генератора, при этом сумма токов всех ТЭД обеспечивается током генератора.
Переходный процесс (с 24-й по 36-ю секунды) связан с переездом каждой из осей на другой грунт (24-я–25-я секунды), что сопровождается существенным перераспределением токов между осями, а затем синхронным ростом тока на каждой оси с 50 А до 150 А и потерей скорости КМ.
Камнем преткновения является напряжение генератора (см. рис. 5, а), так как по техпаспорту допустимо только 800 В. Таким образом, регулирование напряжения генератора по скорости вала ДВС не может быть реализовано в заданных конструктивных ограничениях.
а)
Рис. 4. Скорость движения колесной машины и мощность ДГУ
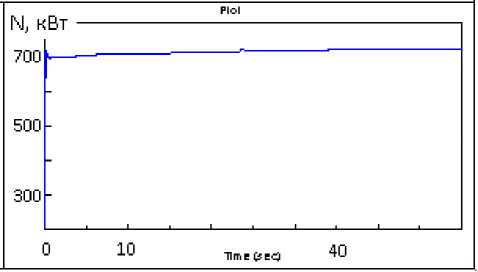
б)
а)
б)
Рис. 5. Напряжение генератора (а) и токи ТЭД (б) при регулировании магнитного потока генератора
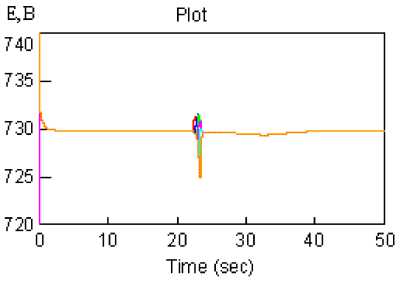
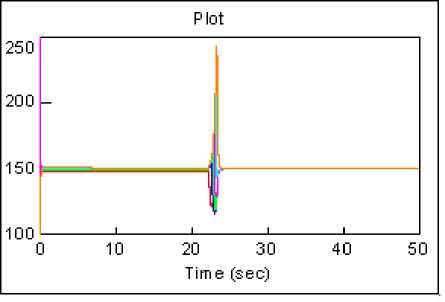
Здесь результаты имитационного моделирования следующие: мощность ДВС стабильна и равна 720 кВт, момент ДВС стабилен и равен 3800 Н·м. График изменения скорости КМ показан на рис. 4а, изменение магнитного потока ТЭД показано на рис. 7, а токов и ЭДС ТЭД – соответственно на рис. 8, а и рис. 8, б.
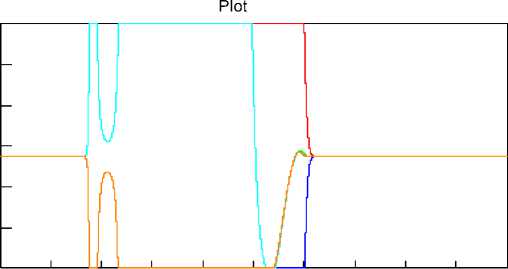
Судя по рис. 7, магнитный поток, определяющий величину К тэд, находится в разумных пределах, величина токов (см. рис. 8) на каждой оси колеблется в пределах от 110 А до 240 А, при этом задняя ось нагружена больше всего, но сумма токов всех ТЭД выдерживается строго в 150 x 6=900 А в периоды равномерного нагружения, и неравномерно колеблется от 110 А до 240 А, но в сумме те же 900 А между 22,5 с и 23,5 с. ЭДС всех ТЭД одинаков в периоды равномерного нагружения и равны 730 В, а в переходный период переезда на задней оси достигается минимум 725 В, а на передней – максимум 732 В, различие в скорости колес, таким образом, не превышает 1 %. Это хороший результат.
Аналогичная ситуация получилась бы при установке индивидуальной коробки передач на каждую ось КМ и попытке их автоматического регулирования по критерию постоянства мощности на каждой оси (колесе).
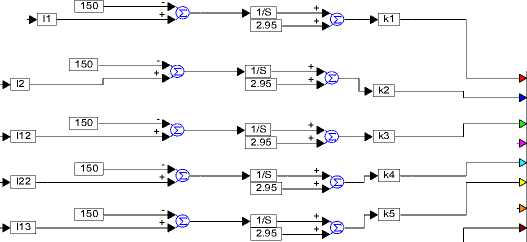
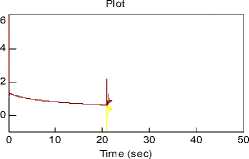

Рис. 9. Автоматизированная система индивидуального регулирования ТЭД
-200
-400
20 20.5 21 21.5 22 22.5 23 23.5 24 24.5 25
Time (sec)
Рис. 10. Токи в ТЭД при индивидуальном регулировании по току
При этом передаточное число в каждой коробке при смене грунта устанавливается отличным от других, что ведет к циркуляции мощности между осями (или колесами). Подобный результат получен в МАМИ при проектировании ГОТ для КМ с насосом и мотором на каждую ось [5]. Ученые МАМИ вынуждены создавать отдельную специальную автоматическую систему выравнивания подачи каждого из моторов ГОП для сглаживания эффекта «разных передаточных чисел» в приводе колес [6].
Таким образом, напрашивается вывод о целесообразности синхронного регулирования ЭМТ по суммарному току всех ТЭД. При этом необходимо отказаться от представления об одинаковом нагружении колес каждой оси током в 150 А.
Видим, что, как и на рис. 8, а, токи «скачут» в гораздо больших пределах: от 110 А до 250 А. Таким образом, самое значимое перераспределение токов между колесами КМ имеет место при смене грунта. На два порядка меньше – при разгоне и поворотах.
Дело в том, что человек, управляющий ДВС, по сути дела задает только внешнюю (или частичную) характеристику ДВС (см. рис. 1), точку же на этой характеристике определяет внешняя нагрузка (на ведущих колесах). Если каждому положению ППТ поставить в соответствие суммарный ток на всех 12 ТЭД, то однозначно определится момент ДВС и точка на его частичной характеристике. На каждой частичной характеристике имеется точка наибольшей экономичности. Для использования описанного выше алгоритма синхронного управления ТЭД в целях еще и управления двигателем внутреннего сгорания в алгоритме необходимо менять только опорный сигнал в зависимости от положения ППТ. Опорный сигнал при частичном нажатии на ППТ должен быть меньше 900 А в соответствии с экономичной характеристикой А на рис. 1. Если сохранить опорный сигнал в 900 А при всех положениях ППТ, то автоматизированная система будет отрабатывать М д =3800 Н·м, что не совпадает ни с корректорной характеристикой, ни с экономичной. Формирование опорного сигнала, отрабатывающего экономичную характеристику ДВС, придает трансмиссии новое свойство – стать дополнительным регулятором ДВС, повышающим его экономичность.
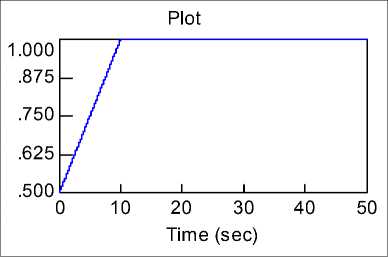
Для реализации сформулированной выше гипотезы математическая модель движения КМ с ЭМТ дополнена управлением ППТ и связанным с ним управлением ЭМТ. В итоге получены следующие результаты. Изменение положения ППТ показано на рис. 12а: в течение 10с КМ разгоняется не при постоянной максимальной подаче топлива (как на рис. 11), а за счет плавного его увеличения и одновременного увеличения опорного сигнала всех ВД (рис. 12, б).
а)
б)
Рис. 12. Положение ППТ (а) без регулирования; опорный сигнал ТЭД, А (б)
А момент ДВС при этом соответствует экономичной характеристике (рис. 13). Совпадение полученной характеристики на рис. 13 с экономичной характеристикой ДВС (линия А на рис. 1) указывает на подтверждение гипотезы, выдвинутой и проверенной в данной статье.
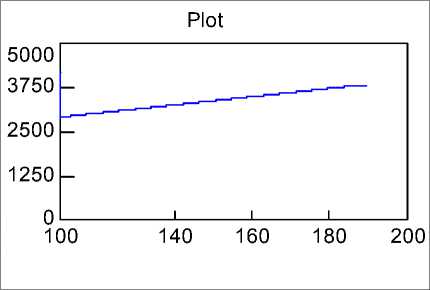
Рис. 13. Момент ДВС по экономичной характеристике
Оценка положительного эффекта может быть получена по рис. 1: точки с координатами 150 р/с; 3500 Н·м и 190 р/с; 2750 Н·м имеют равные показатели по мощности – 550 кВт, но существенно разные по удельному расходу топлива: на экономичной характеристике – 180 г/кВт, а на регуляторной – 192 г/кВт. Разница в 12 г/КВт соответствует экономии топлива в 6 %.
Выводы
-
1. Регулирование электромеханической трансмиссии (ЭМТ) колесной машины через регулирование генератора по скорости нереализуемо и нерационально, так как требует напряжения до 3000 В, что превышает возможности конструкции.
-
2. Предпочтительнее синхронное регулирование всех тяговых электродвигателей (ТЭД) по суммарному току, при нем сохраняется стабильность также по суммарной мощности и по напряжению во всей электрической части ЭМТ. При этом перегрузки каждого ТЭД по току неизбежны, величина перегрузок – до 250 А против расчетного среднего значения 150 А. Различие по ЭДС ТЭД в случае их синхронного регулирования составляет 7 В при средней величине в 730 В, что соответствует рассогласованию в скоростях вращения колес до 1 %.
-
3. При индивидуальном регулировании ТЭД неизбежна циркуляция мощности в случаях попадания колес в разные дорожные условия.
-
4. Использование разработанного алгоритма дополнительного синхронного регулирования машин постоянного тока с независимым возбуждением по положению педали подачи топлива обеспечит работу ДВС по экономичной характеристике и снизит удельный расход топлива до 6 %.
Список литературы Формирование идеальной тяговой характеристики колёсной машины и экономичной характеристики двигателя внутреннего сгорания регулированием электромеханической трансмиссии
- Петров, В.А. Автоматическое управление бесступенчатых передач самоходных машин/В.А. Петров. -М.: Машиностроение, 1986. -248 с.
- Исаков, П.П. Электромеханические трансмиссии гусеничных тракторов/П.П. Исаков, П.Н. Иванченко, А.Д. Егоров. -Л.: Машиностроение, 1981. -302 с.
- Леонтьев, А.Г. Электронная книга по электромеханике/А.Г. Леонтьев. -http://www.unilib.neva.ru/dl/059/CHAPTER5/Chapter5.html
- Имитационное моделирование движения быстроходной гусеничной машины с электрической трансмиссией/Б.Н. Гомберг, С.В. Кондаков, Л.С. Носенко, О.О. Павловская//Вестник ЮУрГУ. Серия «Энергетика». -2012. -Вып. 18. -№ 37 (296). -С. 73-81.
- Орлин, А.С. Теория рабочих процессов поршневых и комбинированных двигателей: учебник для студентов специальности «ДВС»/А.С. Орлин. -М.: Машиностроение, 1971. -400 с.
- Корректирующие алгоритмы для системы управления гидрообъемной трансмиссией полноприводного автотранспортного средства при прямолинейном его движении/С.В. Бахмутов, С.Б. Шухман, Р.Х. Курмаев, А.В. Лепешкин//Автомобильная промышленность. -2010. -№ 1. -С. 14-18.
- Котиев, Г. О. Синтез системы управления тяговыми электродвигателями для индивидуального привода ведущих колес автомобиля/Г.О. Котиев, В.А. Горелов, А.В. Мирошниченко//Наука и образование: электронное научно-техническое издание. -2011. -№ 12. -М.: Изд-во МГТУ им. Н.Э. Баумана. -С. 1-20. -http://technomag.edu.ru/doc/282533.html
- Горелов, В.А. Оценка эффективности законов управления индивидуальным приводом движителей колесных транспортных комплексов/В.А. Горелов, Л.А. Масленников, А.В. Мирошниченко//Наука и образование: электронное научно-техническое издание. -2012. -№ 6. -М.: Изд-во МГТУ им. Н.Э. Баумана. -С. 77-106. -http://technomag.edu.ru/doc/403852.html.
