Формирование ограничений при управлении приводом штангового глубинного насоса

Автор: Садов Виктор Борисович
Статья в выпуске: 2 т.14, 2014 года.
Бесплатный доступ
Рассматривается вопрос формирования ограничений при управлении приводом штангового глубинного насоса в автоматическом режиме. Приведен подход использования данных динамограмм с диагностированием дефекта типа «недостаточный приток жидкости в скважину». Показаны результаты анализа реальной динамограммы, приведен алгоритм коррекции ограничений в процессе настройки количества двойных ходов. Сделаны выводы по эффективности предложенных подходов.
Управление, привод глубинного штангового насоса
Короткий адрес: https://sciup.org/147154963
IDR: 147154963 | УДК: 622.276:62.52
Formation of restrictions at management of the drive sucker rod pump
In article the question of formation of restrictions is considered at management of a drive sucker rod pump in an automatic mode. The approach of use of the data dinacards with diagnosing defect such as “insufficient inflow of a liquid to a chink” is resulted. Results of the analysis real dinacard are shown, the algorithm of correction of restrictions is resulted during adjustment of quantity of double courses. Conclusions on efficiency of the offered approaches are made.
Текст научной статьи Формирование ограничений при управлении приводом штангового глубинного насоса
В качестве привода штангового глубинного насоса (ШГН) могут быть использованы станки-качалки, гидравлические приводы, цепные приводы и т .п. Принципы регулирования в автоматическом режиме для разных типов приводов отличаются весьма слабо. Необходимость подобного регулирования связана с тем, что характеристики добываемой жидкости, величина дебита, параметры привода и множество других факторов имеют нестационарный характер. Кроме того, зависимость подачи насоса от средней скорости движения полированного штока (определяемого количеством двойных ходов в минуту и величиной хода полированного штока) есть величина нелинейная из-за механических характеристик привода и глубинного оборудования, характеристик извлекаемой жидкости, а также степени наполнения глубинного насоса и других параметров нефтедобычи. При использовании комплексных критериев типа [1] встает вопрос о формировании ограничений на управляющее воздействие (в нашем случае на диапазон изменения числа двойных ходов привода).
Ограничения при управлении приводом ШГН
Ограничения снизу определяются технологами с учетом минимального уровня добычи. Также на уровень этого ограничения могут влиять характеристики откачиваемой жидкости и глубинного оборудования. Чем больше вязкость жидкости, связанная с наличием парафина, тем больше опасность «запарафинивания» скважины при очень малых скоростях движения полированного штока. Максимальный уровень определяется технологами, а также может определяться и в системе управления на основе анализа производительности (анализом ее оценки по динамограмме) так же, как это определяется, например, в станциях управления фирмы Lufkin Automation [2]. При этом в алгоритме она может определяться как ограничение при изменении количества двойных ходов.
В ходе настройки числа двойных ходов привода ШГН необходимо учитывать их ограничения. В случае выхода этих значений за ограничения в алгоритмах можно использовать их крайние значения, при этом меняя направление изменения количества двойных ходов на противоположное. Предлагается ограничение на количество двойных ходов сверху корректировать в ходе нефтедобычи. При этом это ограничение в начале цикла настройки количества двойных ходов принимается равным ограничению, устанавливаемому технологами. Это связано с тем, что процессы в ходе нефтедобычи достаточно медленные, и даже в стационарных условиях производительность установки добычи нефти при одном и том же количестве ходов есть величина, возможно, значительно меняющаяся во времени. В процессе нефтедобычи, если диагностируется дефект типа «недостаточный приток жидкости в скважину», то максимальное значение количества двойных ходов принимается равным текущему.
Таким образом, важной является задача диагностики дефекта типа «недостаточный приток жидкости в скважину». Практически все современные станции управления приводами глубинных штанговых насосов снабжены встроенными системами динамометрирования [3], поэтому актуальным является синтез эффективных алгоритмов диагностики скважины по динамограмме.
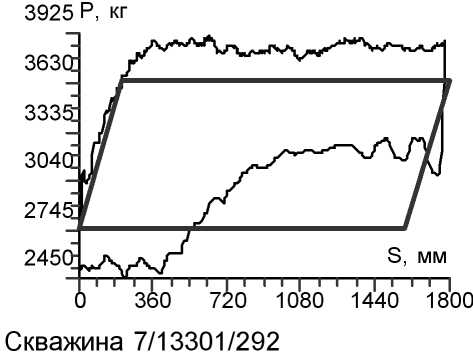
Рис. 1. Динамограмма
На рис. 1 приведена динамограмма, полученная с помощью портативного динамометра (вероятно, неверно масштабированная) на скважине 292 куста № 923 Кокуйского месторождения НК «Лукойл-Пермь».
Из рис. 1 видно, что наблюдается недостаток притока продукции в скважину, и количество двойных ходов на данном приводе следует уменьшить. Управление по проявлению признаков недостаточного притока жидкости в скважину используется в практических целях, например, в контроллерах станций управления фирмы Lufkin Automation [2]. Тем самым система держится на минимальном уровне скоростей движений полированного штока при обеспечении близкого к мак- симальному значению производительности установки.
Характерной особенностью динамограмм с дефектом вида «недостаточный приток жидкости в скважину» является наличие «хвоста» на начальном участке динамограммы при движении полированного штока вниз, нагрузка на котором близка к нагрузке на конечном участке при движении полированного штока вверх. При рассмотрении данного дефекта рассмотрим характеристику развернутой динамограммы, обозначив участок I как участок движения полированного штока вверх, а II – как участок движения полированного штока вниз. При анализе можно использовать сформулированный автором в своих статьях «наивный» подход, при котором в зависимости от поведения точек перегиба характеристики динамограммы и значений точек динамограммы между точками перегиба делается вывод о наличии или отсутствии какого-либо дефекта. Точки перегиба могут быть определены на основе поведения функции развернутой динамограммы вблизи этих точек (изломы или плавные перегибы с переходом скорости изменения усилия через ноль).
Можно рассмотреть разные варианты исходных данных для анализа в зависимости от того, сколько точек перегиба определилось. Можно также сделать замечание, что точка перегиба, соответствующая началу движения, может попасть как на начало участка I, так и на конец участка II. В зависимости от количества точек перегиба на участке I и II можно предложить алгоритм выделения данного дефекта, при котором последовательно рассматриваются варианты различного числа точек перегиба и варианты анализа. Далее они записываются в виде «количество точек перегиба на участке I – количество точек перегиба на участке II (номер варианта)».
2-2(1). Точек перегиба 2+2 (вверх-вниз).
Третья точка на обратном ходе, и если величина этого хода в этой точке составляет не менее фиксированной величины (вычисляется как заданный процент от величины полного хода), то гипотеза «недостаточный приток жидкости в скважину» принимается.
2-2(2). Точек перегиба 2+2 (вверх-вниз).
Если третья точка находится вблизи от верхней точки движения (на расстоянии не более заданного числа процентов от величины полного хода), величина разности хода между третьей и четвертой точками не менее заданного значения (процент от величины полного хода) и величина усилия на штоке в четвертой точке существенно меньше минимального усилия (на величину заданного процента от максимального значения усилия динамограммы), то гипотеза «недостаточный приток жидкости в скважину» принимается. «Существенность» отличия усилий при вычислениях здесь и в дальнейшем может быть только в одной проверке усилий из двух.
2-2(3). Точек перегиба 2+2 (вверх-вниз).
Если вторая точка находится вблизи от верхней точки движения (на расстоянии не более заданного числа процентов от величины полного хода), величина разности хода между второй и третьей точками не менее заданного значения (процент от величины полного хода) и величина усилия на штоке в третьей точке существенно меньше минимального усилия (на величину заданного процента от максимального значения усилия динамограммы), то гипотеза «недостаточный приток жидкости в скважину» принимается.
1-3(1). Точек перегиба 1+3 (вверх-вниз).
Вторая точка на обратном ходе, и если величина этого хода в этой точке составляет не менее заданной величины (вычисляется как заданный процент от величины полного хода), то гипотеза «недостаточный приток жидкости в скважину» принимается.
3-1(1). Точек перегиба 3+1 (вверх-вниз).
Если третья точка находится вблизи от верхней точки движения (на расстоянии не более заданного числа процентов от величины полного хода), величина разности хода между третьей и четвертой точками не менее заданного значения (процент от величины полного хода) и величина усилия на штоке в четвертой точке существенно меньше минимального усилия (на величину заданного процента от максимального значения усилия динамограммы), то гипотеза «недостаточный приток жидкости в скважину» принимается.
2-3(1). Точек перегиба 2+3 (вверх-вниз).
Если третья точка находится вблизи от верхней точки движения (на расстоянии не более заданного числа процентов от величины полного хода), четвертая точка находится вблизи от третьей точки (на расстоянии не более заданного числа процентов от величины полного хода), величина усилия на штоке в четвертой точке меньше или существенно меньше усилия в третьей точке (на величину заданного процента от максимального значения усилия динамограммы), величина усилия на штоке в пятой точке меньше или существенно меньше усилия в четвертой точке (на величину заданного процента от максимального значения усилия динамограммы) и значение усилия в пятой точке отличается от минимального усилия не менее, чем на заданную величину (вычисляется как заданный процент максимального усилия), то гипотеза «недостаточный приток жидкости в скважину» принимается.
2-3(2). Точек перегиба 2+3 (вверх-вниз).
Если третья точка находится вблизи от верхней точки движения (на расстоянии не более заданного числа процентов от величины полного хода), вторая точка находится вблизи от третьей точки (на расстоянии не более заданного числа процентов от величины полного хода), величина усилия на штоке в третьей точке меньше или существенно меньше усилия во второй точке (на величину заданного процента от максимального значения усилия динамограммы), величина усилия на штоке в четвертой точке меньше или существенно меньше усилия в третьей точке (на величину заданного процента от максимального значения усилия динамограммы) и значение усилия в четвертой точке отличается от минимального усилия не менее, чем на заданную величину (вычисляется как заданный процент максимального усилия), то гипотеза «недостаточный приток жидкости в скважину» принимается.
3-2(1). Точек перегиба 3+2 (вверх-вниз).
Если третья точка находится вблизи от верхней точки движения (на расстоянии не более заданного числа процентов от величины полного хода), четвертая точка находится вблизи от третьей точки (на расстоянии не более заданного числа процентов от величины полного хода), величина усилия на штоке в четвертой точке меньше или существенно меньше усилия в третьей точке (на величину заданного процента от максимального значения усилия динамограммы), величина усилия на штоке в пятой точке меньше или существенно меньше усилия в четвертой точке (на величину заданного процента от максимального значения усилия динамограммы) и значение усилия в пятой точке отличается от минимального усилия не менее, чем на заданную величину (вычисляется как заданный процент максимального усилия), то гипотеза «недостаточный приток жидкости в скважину» принимается.
3-2(2). Точек перегиба 3+2 (вверх-вниз).
Если третья точка находится вблизи от верхней точки движения (на расстоянии не более заданного числа процентов от величины полного хода), вторая точка находится вблизи от третьей точки (на расстоянии не более заданного числа процентов от величины полного хода), величина усилия на штоке в третьей точке меньше или существенно меньше усилия во второй точке (на величину заданного процента от максимального значения усилия динамограммы), величина усилия на штоке в четвертой точке меньше или существенно меньше усилия в третьей точке (на величину заданного процента от максимального значения усилия динамограммы) и значение усилия в четвертой точке отличается от минимального усилия не менее, чем на заданную величину (вычисляется как заданный процент максимального усилия), то гипотеза «недостаточный приток жидкости в скважину» принимается.
1-4(1). Точек перегиба 1+4 (вверх-вниз).
Если вторая точка находится вблизи от верхней точки движения (на расстоянии не более заданного числа процентов от величины полного хода), третья точка находится вблизи от второй точки (на расстоянии не более заданного числа процентов от величины полного хода), величина усилия на штоке в третьей точке меньше или существенно меньше усилия во второй точке (на величину заданного процента от максимального значения усилия динамограммы), величина усилия на штоке в четвертой точке меньше или существенно меньше усилия в третьей точке (на величину заданного процента от максимального значения усилия динамограммы) и значение усилия в четвертой точке отличается от минимального усилия не менее, чем на заданную величину (вычисляется как заданный процент максимального усилия), то гипотеза «недостаточный приток жидкости в скважину» принимается.
Данный алгоритм был реализован в виде программы для ПЭВМ и на рис. 2 приведены результаты обработки данных динамограммы, изображенной на рис. 1.
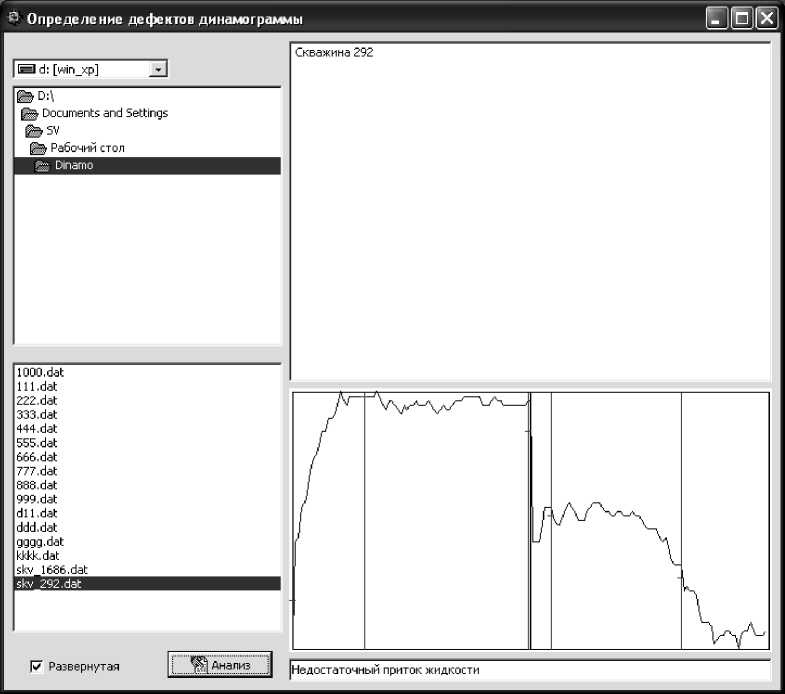
Рис. 2. Результаты обработки динамограммы
Работа данного алгоритма была проверена на ряде модельных примеров, полученных по методике [4], и данных реальных динамограмм. Результативность выделения данного вида дефекта составляла до 98 %. Таким образом, работа предложенного алгоритма выделения признаков недостаточного притока жидкости в скважину является эффективной и может быть использована при коррекции ограничений в режиме автоматического управления приводом ШГН.
Выводы
-
1. При управлении приводом глубинного штангового насоса эффективным подходом к формированию ограничений регулируемого числа двойных ходов является использование встроенных систем диагностики по динамограмме.
-
2. Ограничения целесообразно корректировать непосредственно в ходе управления приводом ШГН в автоматическом режиме.
-
3. Приведенный подход позволяет осуществлять оперативную коррекцию ограничений управления в ходе настройки количества двойных ходов привода ШГН.
Список литературы Формирование ограничений при управлении приводом штангового глубинного насоса
- Садов, В.Б. Автоматическое управление приводом глубинного штангового насоса/В.Б. Садов//Актуальные проблемы автоматизации и управления: тр. науч.-практ. конф. -Челябинск: Издат. центр ЮУрГУ, 2013. -С. 66-69.
- Lufkin -станция управления скважиной. Частотно-регулируемый привод. -http://lufkin.ru/rus/pdf/Lufkin_VSD.pdf (дата обращения: 15.04.2013).
- Сравнительный анализ возможностей отечественных и импортных систем автоматизации скважин, эксплуатируемых ШГН/М.И. Хакимьянов, С.В. Светлакова, Б.В. Гузеев и др.//Нефтегазовое дело. -2008. -№ 2. -С. 1-22.
- Садов, В. Б. Моделирование динамограмм при добыче нефти глубинными штанговыми насосами/В.Б. Садов.//Информационно-измерительные и управляющие системы и устройства: сб. тр. Приборостроит. фак. -Челябинск: Издат. центр ЮУрГУ, 2011. -С. 172-177.
