Формирование требований к качеству синхронизации цифровых систем передачи телеметрической информации

Автор: Лоскутов Андрей Иванович, Дуников Артм Сергеевич, Артюшкин Андрей Борисович, Кондратюк Виктор Игоревич
Рубрика: Управление сложными системами
Статья в выпуске: 1, 2017 года.
Бесплатный доступ
Представлены результаты оценки качества работы систем синхронизации в условиях изменения точностных характеристик определения границ следования бит. Сформулированы требования к качеству работы систем синхронизации при приеме группового телеметрического сигнала.
Телеметрия, потеря информации, система синхронизации, помехоустойчивость, додетекторная запись
Короткий адрес: https://sciup.org/148160291
IDR: 148160291 | УДК: 621.397.5
Formation of requirements to the quality of synchronization in digital transmission systems of telemetric information
The results of evaluation of the quality of synchronization systems in a changing accuracy characteristics to determine the boundaries of the following bits are presented. The requirements to quality operation of the systems of synchronization when receiving a group telemetric signal are formulated.
Текст научной статьи Формирование требований к качеству синхронизации цифровых систем передачи телеметрической информации
А.S. Dunikov А.B. Artyushkin V.I. Kondratyuk
FORMATION OF REQUIREMENTS TO THE QUALITY OF
SYNCHRONIZATION IN DIGITAL TRANSMISSION SYSTEMS
OF TELEMETRIC INFORMATION
The results of evaluation of the quality of synchronization systems in a changing accuracy characteristics to determine the boundaries of the following bits are presented. The requirements to quality operation of the systems of synchronization when receiving a group telemetric signal are formulated.
рической информации НПРА, является система синхронизации. Для обеспечения высокого качества регистрируемой информации необходимо определить требования к качеству работы систем синхронизации НПРА, которые отвечали бы существующим актуальным направлениям развития бортовых и наземных радиотелеметри-ческих средств (РТС).
Предложения по формализации требований к системе синхронизации наземных приемно-регистрирующих станций при приеме группового телеметрического сигнала. Постановка задачи
Под синхронизацией в телеметрии понимается установление временного соответствия между процессами в совместно функционирующих передающей и приемной частях РТС. В целях обеспечения надежной синхронизации в радиотелеметрической системе используют кадровые, канальные (словные) и символьные синхросигналы. В настоящее время к системам синхронизации РТС предъявляются следующие требования [1]:
-
1) разделение каналов должно быть надеж-
ВЕСТНИК 2017
ВЕСТНИК 2017
ным, то есть ошибка в определении принадлежности измерительных сигналов тому или иному датчику должна иметь малую вероятность;
-
2) определение границ канальных интервалов и символов должно быть достаточно точным, чтобы энергетические потери и взаимные помехи каналов из-за неточности синхронизации были малы;
-
3) время вхождения в синхронизацию и удержание синхронизации при перерывах в связи должны быть такими, чтобы потери информации были в допустимых пределах;
-
4) введение синхросигналов в групповой телеметрический сигнал не должно существенно сказываться на снижении скорости передачи информации или увеличении энергетического потенциала радиолинии.
Формулирование данных требований направлено, прежде всего, на обеспечение надежности регистрации телеметрической информации, передаваемой с борта изделия РКТ на этапе его выведения. Анализ фрагментов записи телеметрической информации наземных приемно-регистрирующих станций (НПРС) показал, что объем потерянных и искаженных результатов телеизмерений о состоянии бортовой аппаратуры составляет 15–20% от объема всей зарегистрированной телеметрической информации. Эти потери в большинстве случаев обусловлены срывом синхронизации радиотелеметрических средств [2]. Выявлено, что промежутки, на которых имела место потеря информации, зачастую соответствуют важным участкам циклограммы выведения изделия РКТ. Данное заключение подтверждается рис. 1, на котором изображен фрагмент записи телеметрической информации, зарегистрированной при пуске ракетоносителя «Рокот» 28 июля 2012 года. Анализ выполнен с помощью программы формирования единой записи телеметрической информации “MontISX”, разработанной «ОКБ Спектр». Из рис. 1 видно, что участок потери информации с 690-й по 754-ю секунду соответствует режиму переключения работы бортовой аппаратуры.
При этом временной промежуток потери информации обусловлен длительностью вхождения в синхронизм наземной приемно-ре-гистрирующей аппаратуры, зависящей от количества кадров группового телеметрического сигнала, требуемых на установление синхронизации.
Следовательно, снижение объема потерь и уровня искажений телеметрической информации возможно за счет применения научно обоснованных подходов при проектировании систем синхронизации наземных приемно-ре-гистрирующих станций телеметрической информации, основанных на четкой формализации требований к системам синхронизации радио-телеметрических средств.
Корректная формализация требований к системам синхронизации радиотелеметрических средств и их максимальный учет на этапе проектирования наземных приемно-регистрирующих станций призваны повысить надежность регистрации результатов телеизмерений.
Для цифровых способов передачи информации определяющее воздействие на качество вхождения в синхронизм наземной приемно-регистрирующей станции при приеме группово-
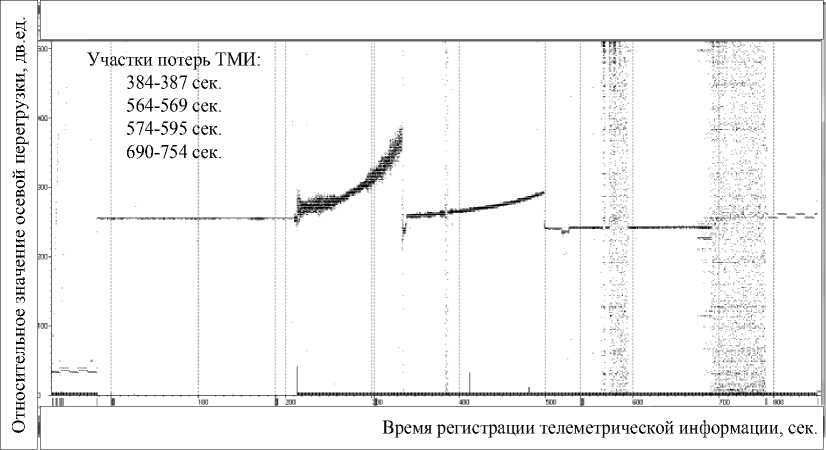
Рис. 1. Результаты регистрации телеметрической информации
го телеметрического сигнала оказывают системы символьной и кадровой синхронизации.
Следует отметить, что основные потери данных обусловлены срывом работы системы кадровой синхронизации из-за значительного ухудшения условий распространения сигнала.
Качество работы системы кадровой синхронизации можно оценить вероятностью ее правильной работы P пр.р., которая описывается выражением
P пр.р. = 1 – P ош.р., (1)
где P ош.р. – вероятность ошибочной работы системы кадровой синхронизации.
При этом, вероятность ошибки работы системы кадровой синхронизации рассчитывается в соответствии с выражением [1]
P ош.р. = P пр.с. + P л.с. – P пр.с. P л.с., (2)
где P пр.с. – вероятность пропуска синхронизации; P л.с. – вероятность ложной синхронизации. Вероятность пропуска синхронизации оценивается по формуле
вания к вероятности правильного обнаружения маркера кадра. При этом d определяется как степень числа при определении вероятности ложного обнаружения (к примеру, F л.о. = 10–3, d = 3).
Одним из основных требований к качеству работы систем синхронизации радиотелеметри-ческих средств при приеме группового телеметрического сигнала является минимизация количества анализируемых кадров, требуемых на вхождение в синхронизм. При этом данные требования в формализованном виде записываются следующим образом:
P пр.с. = 1 – (1 – P b ) n , (3)
где Pb – суммарная вероятность битовой ошибки;
n – количество символов в маркере кадра.
Вероятность ложной синхронизации оцени-
вается согласно выражению
Р л.с.
= 2 -
n
( n - (1 - P b ) n ) v n ) .
Время вхождения в синхронизм радиотеле-метрической системы, после которого начинается устойчивый прием телеметрической информации, определяется количеством кадров, необходимых для анализа в системе кадровой синхронизации. Вероятность правильной работы системы кадровой синхронизации определя-
ется выражением
пр.р.
N кадр.синх.
( ош.р. / ,
F : N кадр.синх. ( d , n , Pb ) ^ min . (7)
В данном случае значение вероятности битовой ошибки зависит от качества работы системы символьной синхронизации и оценивается в данном случае суммарной вероятностью битовой ошибки в условиях неизвестной временной задержки принимаемого сигнала, которая описывается следующим выражением [3]:
T
T max
P b = J P (t) p (t) dT, (8)
Tmin где τ – значение временной задержки принимаемого сигнала;
P (τ) – вероятность битовой ошибки при случайном изменении значения временной задержки;
p (τ) – плотность вероятности распределения случайной величины τ.
В работе [3] определены выражения для оценки суммарной вероятности битовой ошибки при рассмотрении основных видов модуляции, применяемых в цифровых радиотелеметриче-ских системах, в частности для модуляций FSK и PSK
„ z x2
pfsk (yt) --/^ ; .? x(9)
V 2nYT (2Ф( y t )-1)
1 ( - 2 (t2 +П-Т2))
x JI Q(4qiT;4qi(1 -t))--e 2 Iо(qiT(1 -t)) I e 21 dT, о V 2
ВЕСТНИК 2017
где N кадр.синх. – количество кадров на интервале анализа.
Оценивание количества кадров, требуемых
P PSK (Y t )
________2________
72Пу т (2Ф( Y t ) - 1)
×
на вхождение в синхронизм, производится в соответствии с выражением, полученным из выражения (5) при подстановке в него выражений (1–4):
1 ( 1 2 2.. - x JI Q(72q1t;^^.(1 -T))--e ql( ( ’’10(2qiT(1 -т)) I e Y-dr,
V 2 V
N кадр.синх.
г n n'
- -4g (1 - P b ) n + 2 - n n (1 P b ) -I (1 - P b ) n x 2 - n n (1 P b )
d I n ^ n
где d – коэффициент, характеризующий требо-
где γτ – приведенная среднеквадратическая погрешность синхронизации;
Q – функция Маркума;
I 0 – функция Бесселя нулевого порядка.
При этом значение приведенной среднеквадратической погрешности синхронизации определяется при аппаратной реализации системы символьной синхронизации.
Таким образом, при разработке и создании наземных приемно-регистрирующих станций телеметрической информации математический аппарат формализации требований к системе синхронизации описывается следующим выражением:
F • N кадр.синх. ( d, n, Y t ) ^ min. (11)
Представленный выше математический аппарат формирования требований к системе кадровой синхронизации справедлив для случая приема группового телеметрического сигнала со структурой РТС-9Ц.
В работе [4] описаны основные типы сим-
Таблица 1
Выражения оценки погрешности синхронизации
|
Тип синхронизатора |
Оптимальный синхронизатор |
Квазиоптимальный синхронизатор |
Синфазносреднефазный синхронизатор |
Синхронизатор с опережающим и запаздывающим стробированием |
|
Выражение для оценки погрешности |
σ 0, 25 γτ = τ ≈ τ и Kq |
0,411 Y =~ / = 4 KE b / N о |
γ =≈ N 0 ∆ f τ 4 E э b |
γ =≈ N 0 ∆ f τ 8 Eb э |
ВЕСТНИК 2017
Здесь: σ τ – среднеквадратическое отклонение погрешности определения границ бит; τи – длительность бита;
K – интервал анализа;
q – отношение сигнал/шум;
Eb – энергия сигнала на бит;
N 0 – спектральная плотность мощности белого шума;
Δ f э – эквивалентная полоса следящей системы символьной синхронизации.
Описание процесса моделирования. На рис. 2 представлен график зависимости значений приведенной среднеквадратической погрешности синхронизации от значения отношения сигнал/шум для различных типов символьных синхронизаторов, при условии усреднения по десяти интервалам приема бит группового телеметрического сигнала. На рис. 2 кривая 1 соответствует значениям приведенной среднеквадратической погрешности синхронизации синфазно-среднефазного символьного синхронизатора; 2 – квазиоптимального символьного синхронизатора, соответствующего устройству синхронизации наземных приемно-регистрирующих станций телеметрической информации; 3 – символьного синхронизатора с опережающим и запаздывающим стробированием; 4 – оптимального символьного синхронизатора.
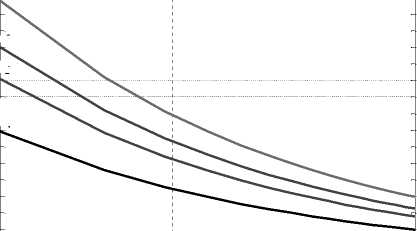
На рис. 3 представлен график зависимости значений приведенной среднеквадратической погрешности синхронизации от значения отно- вольных синхронизаторов, применяемых в цифровых системах приема информации. К данным типам относятся: оптимальный синхронизатор, квазиоптимальный синхронизатор, синфазносреднефазный синхронизатор, синхронизатор с опережающим и запаздывающим стробированием. Каждый из данных синхронизаторов характеризуется различными значениями приведенной среднеквадратической погрешности синхронизации. В таблице 1 приведены выражения оценки приведенной среднеквадратической погрешности синхронизации для различных типов символьных синхронизаторов.
0.18
0.17
0.16
0.02
0.15
0.14
0.13
0.12
a
0.11
0.1
§
0.09
0.08
0.07
0.06
0.05
0.04
0.03
1 2 3 4 5 6 7 8 9 10 11 12
Отношение сигнал/шум, дБ
0.01
Рис. 2. Результаты оценки приведенной среднеквадратической погрешности синхронизации для различных синхронизаторов шения сигнал/шум для квазиоптимального символьного синхронизатора при различном значении интервала усреднения.
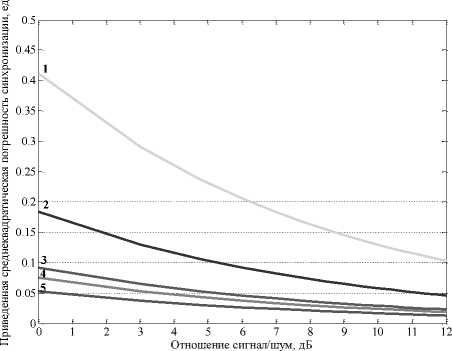
Рис. 3. Результаты оценки приведенной среднеквадратической погрешности синхронизации при различном объеме анализируемых бит:
1) – 1 бит; 2) – 5 бит; 3) – 20 бит; 4) – 30 бит; 5) – 60 бит
Приведенная среднеквадратическая погрешность синхронизации, ед.
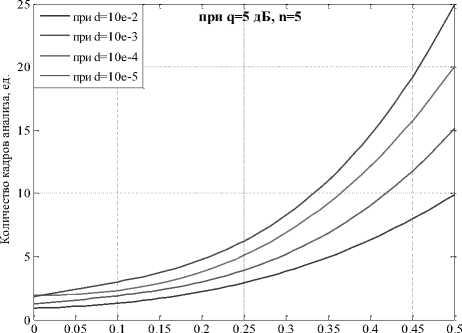
Рис. 5. Результаты оценки количества кадров анализа для работы системы кадровой синхронизации при изменении d , заданном q = 5 и n = 5
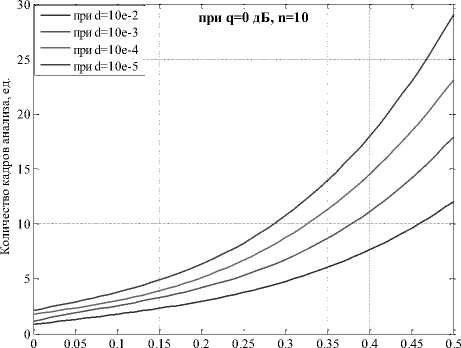
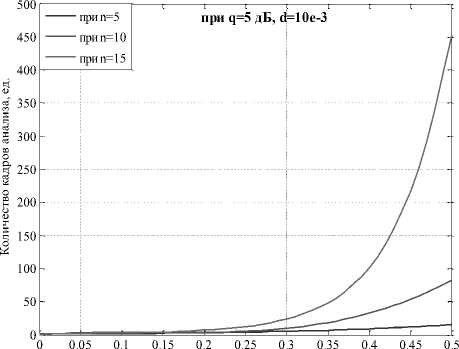
На рисунках 4–6 представлены результаты оценки количества кадров анализа, необходимых для установления кадровой синхронизации при изменении параметров маркера кадра, требований к системе кадровой синхронизации и приведенной среднеквадратической погрешности синхронизации.
Приведенная среднеквадратическая погрешность синхронизации, ед.
Рис. 4. Результаты оценки количества кадров анализа для работы системы кадровой синхронизации при изменении d , заданном q = 0 дБ и n = 10
Анализ результатов моделирования . Результаты моделирования показывают, что значительное влияние на время вхождения в синхронизм наземной приемно-регистрирующей станции телеметрической информации, определяемой по количеству кадров анализа N , кадр.синх. оказывает приведенная среднеквадратическая погрешность синхронизации. Данная погрешность зависит от аппаратно-программной реа-
Приведенная среднеквадратическая погрешность синхронизации, ед.
Рис. 6. Результаты оценки количества кадров анализа для работы системы кадровой синхронизации при изменении n и фиксированном d и q
ВЕСТНИК 2017
лизации системы символьной синхронизации. Кроме того, вероятность ложного обнаружения необходимо задавать в интервалах 10–2–10–4, а количество символов в маркере кадра n целесообразно выбирать исходя из кадровой структуры и обнаруживающей способности синхрокомбинации.
Таким образом, для повышения качества работы системы синхронизации радиотелемет-рических средств, при проектировании перспективной наземной приемно-регистрирующей аппаратуры, необходима разработка аппаратнопрограммных средств, обеспечивающих значение приведенной погрешности символьной синхронизации на уровне, не превышающем значения, равного 0,05.
Список литературы Формирование требований к качеству синхронизации цифровых систем передачи телеметрической информации
- Назаров А.В., Козырев Г.И., Шитов И.В. Современная телеметрия в теории и на практике: учебный курс/А.В. Назаров. -СПб.: Наука и техника, 2007. -667 с.
- Дуников А.С. Современное состояние и проблемы развития информационно-телеметрических средств/А.А. Бянкин, А.И. Лоскутов, А.С. Дуников//Сборник трудов Всероссийской научно-практической конференции «Современные проблемы создания и эксплуатации вооружения, военной и специальной техники». -СПб.: ВКА им. А.Ф. Можайского, 2012. -Т. 1.-С. 221-223.
- Горяинов В.Т. Требования к точности тактовой синхронизации в системах передачи двоичной информации/В.Т. Горяинов//Известия вузов СССР -Радиоэлектроника. -1970. -№ 7. -С. 787-798.
- Фомин А.И. Синхронизация цифровых радиосистем передачи информации/А.И. Фомин. -М.: Сайенс-Пресс, 2008. -80 c.
- Новиков А.Н. Математическая модель обоснования вариантов реконфигурации распределенной автоматизированной контрольно-измерительной системы/А.Н. Новиков, А.А. Нечай, А.В. Малахов//Вестник Российского нового университета. Серия «Сложные системы: модели, анализ и управление». -2016. -Выпуски 1-2. -С. 56-59.
- Нечай А.А. Методика повышения надежности функционирования систем, организованных на перепрограммируемых элементах/А.А. Нечай, П.Е. Котиков//Вестник Российского нового университета. Серия «Сложные системы: модели, анализ и управление». -2016. -Выпуски 1-2. -С. 87-89.
- Уланов А.В. Повышение оперативности принятия решения в автоматизированных системах/А.В. Уланов, А.А. Нечай, П.Е. Котиков//Наука и современность. -2014. -№ 2. -С. 95.
