Фрезерный станок с параллельной кинематикой

Автор: Панов Сергей Сергеевич, Густова Ольга Николаевна, Мазеин Петр Германович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Общие проблемы машиностроения
Статья в выпуске: 1-2 т.14, 2012 года.
Бесплатный доступ
Выполнено моделирование манипулятора фрезерного станка-трипода, обеспечивающее инженерное решение прямой и обратной задачи его кинематики.
Модель, трипод, параллельная кинематика, интерфейс, станок
Короткий адрес: https://sciup.org/148200613
IDR: 148200613 | УДК: 621.9
Milling machine with collateral kinematics
Modeling of manipulator of the milling machine-tripod, providing engineering solution of direct and inverse problem of its kinematics is made.
Текст научной статьи Фрезерный станок с параллельной кинематикой
схемы (рис. 2) была разработана математическая модель кинематики станка, в табл. 2 указаны геометрические параметры трипода.
Таблица 1. Основные технические характеристики станка «Дельта 1»
|
количество линейных приводов |
3 |
|
система управления |
PCNC |
|
порт управления |
USB |
|
размеры рабочей зоны (без учета вылета инструмента), мм |
230x230x140 |
|
расчетная сила резания в рабочей зоне, Н |
6 |
|
мощность привода фрезерной головки, Вт |
450 |
|
габаритные размеры, мм |
740x740х594 |
|
масса, кг |
80 |
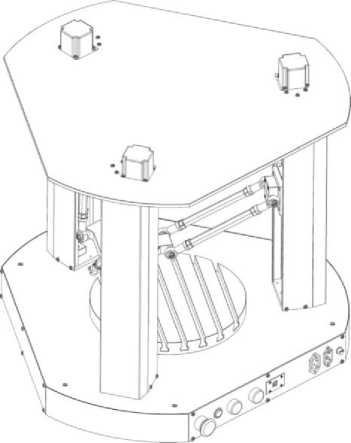
Рис. 1. Станок типа трипод «Дельта 1»
В прямой задаче по исходным заданным линейным перемещениям линейных приводов получаем положение подвижной платформы. В обратной задаче по исходным заданным координатам подвижной платформы определяем величины перемещений линейных приводов. При решении обратной задачи заданы: координаты центра (x0, y0, z0), 0≤z0≤L стороны фигуры b и с, координаты x, y точек на осях: х1 = 0; y1 = 0; х2 = ^; у2 = ^; x3 = d; y3 = 0. Необходимо
2 2 ’ J найти z1, z2, z3. Рассчитаем координаты точек (x01, y01, z0), (x02, y02, z0), (x03, y03, z0):
Ь с хО1 = хО - ---;
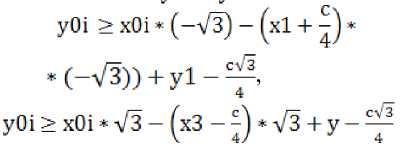
л Ъ + 2с СУЗ.
уО1 = уО-—= + —;
2v 34
х02 = х0;у02 = у0 + ^-^;(1)
хОЗ = хО + - + -;
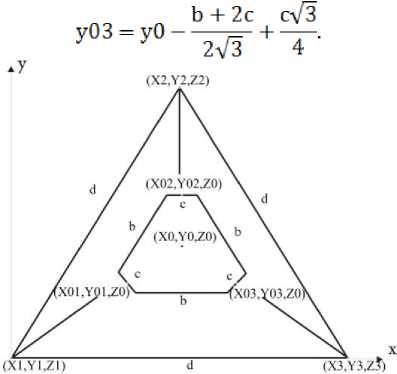
Рис. 2. Проекция звеньев трипода на плоскость OXY
Для того, чтобы подвижная платформа не пересекалась с осями звеньев необходима проверка расположения точек (x01, y01), (x02, y02), (x03, y30) внутри треугольника (рис. 2). Следовательно, должны выполняться условия:
,

Таким образом, получено решение обратной задачи кинематики трипода, удовлетворяющее требованиям его функционирования.
При решении прямой задачи дано: z1, z2, z3. L — п — е < zi < L — е, i = 1,3 . Расстояние между (x0i, y0i, z0) и (xi, yi, zi), i = 1,3, равно a. Составим систему уравнений:
f(xl — xOl)2 + (yl — yOl)2 + (zl — zO)2 = а2 < (х2 — х02)2 + (у2 — у02)2 + (z2 — zO)2 = а2 ( (хЗ — хОЗ)2 + (уЗ — уОЗ)2 + (z3 — zO)2 = а2 (3)
Выполняя преобразования получим:
(кх * zO + сх)2 + (ку * zO + су)2 4-+z02 — 2 * zl * zO = cl;z02(kx2 + ky2 + 1) + 2z0 *


Должно выполняться: D≥0. Нам необходимо меньшее значение z0:
„ -(kx-cx+ky-cy-zll-v'D _ zO = . Необходимо также
(kx2+kyz+l)
выполнение условия: z0≥0. Таким образом, система решена. Для того, чтобы подвижная платформа не пересекалась с осями, проверим следующее условие. Через точки (x1, y1), (x2, y2), (x3, y3) проведем прямые, параллельные противолежащим сторонам d и проверим, чтобы точки (x01, y01), (x02, y02), (x03, y30) лежали внутри треугольника. Уравнения прямых:
у = X « (-V3) - (xl + ^) * (-V3)) + yl - ^,
1— ( c \ y =y2,y = x * уЗ — I x3 — 1 *
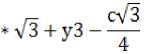
соответственно. Следовательно, должны выполняться условия:
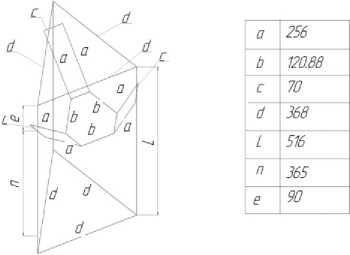
Рис. 3. Геометрическая схема разработанного трипода: а – длины штанг, b – размеры подвижной платформы; с – расстояние между штангами, L – длина линейных приводов; n – величина рабочего хода привода, e – верхняя зона ограничения перемещений; f – нижняя зона ограничения перемещений
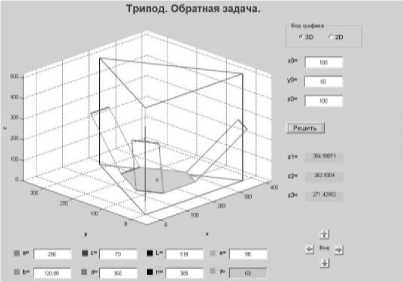
Рис. 4. Реализация примера решения обратной задачи кинематики трипода в MATLAB: x0, y0, Z0 – координаты центральной платформы, z1, z2, z3 – координаты линейных перемещений кареток
На рис. 4 представлен пример решения и интерфейс обратной задачи кинематики трипода, выполненный в программе MATLAB 7.7.0 при заданных значениях линейных модулей. В центральной части окна программы программно визуализирована геометрическая модель трипода в 3D, в правом нижнем углу находятся клавиши изменяющие угол обзора модели. На рис. 5 представлен пример решения прямой задачи. Разработанная программа обеспечивает моделирование прямой и обратной задач для любой геометрии трипода. В математической модели заложены ограничения на пересечения шарниров, линейных штанг и выноса перемещаемой платформы за пределы рабочей зоны, при которых возникает заклинивание механизма трипода. Таким образом, создан настольный манипулятор для фрезерного станка «Дельта 1» с параллельной кинематикой, разработана математическую модель его кинематики, выполнено решение прямой и обратной задач кинематики трипода, разработаны алгоритмы, программы и интерфейс для решения этих задач, выполнены численные примеры решения.
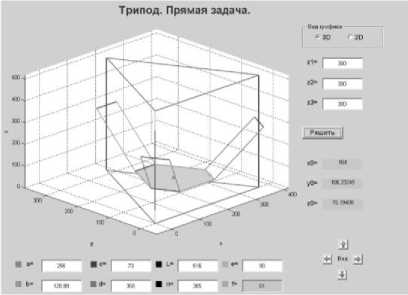
Рис. 5. Реализация примера решения прямой задачи в MATLAB
Список литературы Фрезерный станок с параллельной кинематикой
- Глазунов, В.А. Пространственные механизмы параллельной структуры: учебное пособие/В.А. Глазунов, А. Ш. Колискор, А.Ф. Крайнев. -М.: Наука, 1991. 94 с.
- Кузнецов, Ю.Н. Компоновки станков с механизмами параллельной структуры/Ю.Н. Кузнецов, Д.А. Дмитриев, Г.Е. Диневич. -Херсон, 2010. 471 с.
- Панов, С.С. Учебно-исследовательский стенд типа «Трипод» с параллельной кинематикой и компьютерным управлением/C.C. Панов, П.Г. Мазеин//Известия Самарского научного центра РАН. 2011. Т. 13, №1(3). С. 724-726.
