Функционирование математической модели ошибок бесплатформенной инерциальной навигационной системы при одновременной навигации, динамическом построении и обработки данных многоструктурных систем управления в рамках разработки алгоритмов интегрированной системы навигации летательного аппарата с использованием GPS / ГЛОНАСС технологий

Автор: Доронин Дмитрий Вячеславович, Донченко Анатолий Анатольевич, Шевцов Сергей Николаевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Технологии в авиационном и ракетно-космическом комплексе
Статья в выпуске: 4-5 т.14, 2012 года.
Бесплатный доступ
Статья посвящена вопросам функционирования математической модели ошибок бесплатформенной инерциальной навигационной системы (БИНС) при одновременной навигации, динамическом построении и обработки данных многоструктурных систем управления в рамках разработки алгоритмов интегрированной системы навигации летательного аппарата с использованием GPS/ГЛОНАСС технологий. В условиях развития современных инновационных технологий предполагается анализировать ошибки БИНС в процессе построения электронных карт с одновременным учетом параметров движения при решении актуальных задач управления и наведения для подвижных объектов различной природы.
Методы управления и наведения, навигационная система, беспилотный летательный аппарат, многоструктурная система управления, геоинформационная аналитическая система
Короткий адрес: https://sciup.org/148201399
IDR: 148201399 | УДК: 621.391
Mistakes mathematical model functioning of platformless inertial navigation system at simultaneous navigation, dynamic creation and data processing of multistructural control systems within the development of aircraft integrated navigation system algorithms with use the GPS / GLONASS technologies
Article is devoted to the questions of mistakes mathematical model functioning of platformless inertial navigation system (PINS) at simultaneous navigation, dynamic creation and data processing of multistructural control systems within the development of aircraft integrated navigation system algorithms with use of GPS/GLONASS technologies. In the conditions of development the modern innovative technologies it is supposed to analyze errors of PINS in the course of creation the electronic cards with the simultaneous accounting the parameters of movement at the solution of actual problems of management and prompting for mobile objects of the various nature.
Текст научной статьи Функционирование математической модели ошибок бесплатформенной инерциальной навигационной системы при одновременной навигации, динамическом построении и обработки данных многоструктурных систем управления в рамках разработки алгоритмов интегрированной системы навигации летательного аппарата с использованием GPS / ГЛОНАСС технологий
Simultaneous Location and Mapping (SLAM)
Интенсивное развитие методов и моделей одновременной навигации и построения электронных карт при решении актуальных задач управления и наведения для подвижных объектов различной природы приводит к необходимости вырабатывания и обоснования путей разрешения новых проблем построения информационно-аналитических систем управления как в условиях мониторинга значительных масштабов, обновления больших массивов геопространственных данных, так и преодоления запретных зон и других [1]. Синтез и обработка проблемно-ориентированных структур пространственных данных, к примеру, при динамическом построении маршрутов движения беспилотных летательных аппаратов (БПЛА), успешно осуществляется с применением технологий SLAM – оригинальной концепции, которая связывает два независимых процесса в непрерывный цикл последовательных вычислений, при этом результаты одного процесса участвуют в вычислениях другого процесса. Подход SLAM подразумевает также ряд новых методов, используемых роботами и БПЛА для построения карты в неизвестном пространстве или для обновления карты в заранее известном
пространстве с одновременным контролем текущего местоположения, состояния объекта и пройденного пути. Однако построение электронных карт маршрутов движения подвижных объектов не является достаточным для эффективного выполнения целевого предназначения сложного динамического объекта, в связи с чем выделяется актуальная фундаментальная проблема согласования данных методов управления движением и концепции SLAM для реализации мониторинга значительных масштабов при существенном ограничении возможностей обеспечения информационноаналитическими, коммуникационными и вычислительными ресурсами в современных условиях. Существенной проблемой в задаче построения электронных карт маршрутов движения подвижных объектов является учет ошибок БИНС.
Для вывода модели ошибок БИНС воспользуемся следующими векторными соотношениями.
-
1. Уравнение ошибок построения вертикали и ориентации в азимуте:
j j j j j
-
er = er × ωМ - εМ + ∆ωМ , (1)
-
2. Уравнение ошибок выработки скорости:
где j = х • z + а • j + в • к - вектор конечного поворота, представляющего собой совокупность трех элементарных поворотов на углы α (характеризует азимутальную ошибку БИНС), β и χ (ошибки построения вертикали); (jM - вектор угловой скорости географического трехгранника;
s m = [ S - , s ум , £ zm ] T - вектор дрейфов гироскопов;
А 0 2 M - вектор ошибок вычисления угловой скорости географического трехгранника.
А ^ м = — e r х п м + 5 a m + А < k
где n- - вектор перегрузок, записанный в проекциях на оси местной географической системы координат; 5a М = [5ax, 5a y, 5a z ]т - вектор смещения нулей акселерометров; Аak - вектор ошибок компенсации «вредных» ускорений.
Найдем компоненты вектора ошибок угловой скорости географического трехгранника А о м как разность между «расчетными» и истинными значениями. Представим в этих соотношениях «вычисленные» параметры движения в виде суммы «истинного» значения и малой ошибки. Пренебрегая величинами второго и более высокого порядка малости и вычисляя векторные произведения f х 0)м и г х пм , получаем следующую систему уравнений ошибок БИНС:
а = о - - в - о - - X + —-А V - +[ V z- +О з cos ф ^-А ф - ^^ ф -А r - S y- ;
r (r cos ф )
АVV
\P = —®xM« + OyM X--x- + "^T А r - S zM rr
А VV
XL = O zM « - O yM в +-- Q З sm ф -А Ф-- ~ А r - S xM ;
rr
-
А VxM = g0в • nyM - ga • nzM + ^xM - АakM;
-
< А VyM = g0X - nzM - g0 в • nxM + 5a yM - А7-;
А VzM = g0a - nxM - g0X - nyM + SdyM - АakM•
Определим ошибки определения координат ф, X, h аналогичным образом. Получим для этих ошибок следующие уравнения:
~
Аф) = ф - ф = — - —м = ~ r
V
АХ = X - X = —zM r cos ф
Л7 7
V xM - V xM А r rr 2
;
Vzm _ А V --—----- r cos ф r cos ф
\h = h—h = 7 -V =
А ’1 h h V yM V yM А V yM
VV
+ zM— Аф А r r cos2 ф r 2 cos ф
Представим погрешности гироскопов и акселерометров БИНС следующим образом:
-
- Sm = -^m5x + ^M - 5 A - 5^ - ^M - 5KK + f z- 5copk + f x- 5(0Tk + 5 эй + 2 f M{zM 5од
Л-lVl ZIVL x ZIVL Lt XIVL Ut r Lt 2
g 0 g 0
;
-
- SyM = ° zM • 5Ty - 50тр - ° xM • 5ky - ° yM • 5 K p + f z- - 5° pp + f f y- - 4 5° Tp + 5° zp + 2 f yM 2 ^ z- 50 Hp ;
g 0 I g 0 )
-
- S zM = O xM - 5kz - O xM 5 A - 50 tT - O zM 5 K T + x- 5 5tO p T + z- 5 50 rT + 5O tT + ^xM^zM
g 0 g 0 g 0
5 f xM =Ат х + 5T x + 5 Q x - fxM ;
< 5 f yM = Ат у + 5т y + 5 Q y - f yM - 5 yx - f xM + 5 yz - f - ;
5fZM =Атг + 5тz + 5Qz - f- + 5zx - fx-, где 5fxM, 5fyM, 5fzM - ошибка определения кажущегося ускорения; дюрк, дюрр, ЗшрТ, Stork, Smrp, SrorT - отклонения скоростей ухода гироблоков (ГБ) из-за осевой и радиальной разбалансировки; SroTk, дготТ, дготр - случайные угловые скорости ухода ГБ из-за тяжения и осевой разбалансировки; StoHk, дгонр, §гонТ - составляющие случайной угловой скорости ухода из-за неравножесткости ГБ; §Кк, §КТ, §Кр - отклонение масштабного коэффициента по осям МГСК; Атх, Ату, Atz - отклонение среднего значения акселерометров; Six, дгу, Siz - случайные отклонения акселерометров; SQx,SQy,SQz - отклонения масштабных коэффициентов акселерометров; Szx, Syz, Syx - ошибки взаимной выставки акселерометров; STx, Skz, STy - ошибки выставки кинематического момента ГБ; SФх0, SФz0 - ошибки на-
~ е~ е~ чальной выставки ГБ в горизонт; 5отк, оотТ, осотр
- погрешности калибровки ухода ГБ вокруг осей МГСК; fxM, fyM, fzM - измеренные значения кажущегося ускорения; SA(0) - начальная погрешность определения азимута.
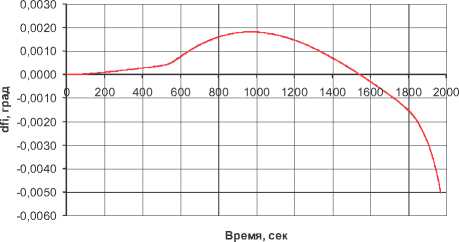
Приведенная модель ошибок БИНС использовалась в алгоритмах интегрированной комплексной навигационной системы летательного аппарата. Комплексирование осуществлялось с применением фильтра Калмана 25-го порядка по слабосвязанной схеме. Примерный вид ошибок определения координат и скорости как функции времени движения приведен на рис. 1. Видно, что сходимость фильтра Калмана обеспечивается с первых секунд движения. При этом точность навигации интегрированной системы определяется точностью спутниковой составляющей.
Имеющийся обширный научно-технический задел по разработке и реализации методов управления движением и наведением сложных динамических объектов не позволяет осуществлять мониторинг и анализ динамики их движения и поведения при одновременной навигации и существенных ограничениях информационно-аналитических, коммуникационных и вычислительных ресурсов. В условиях интенсивного развития многоструктурных систем управления БПЛА возникает проблема в совмещении методов управления движением и наведением летательного аппарата с имеющимися наработками в области геоинформа-ционных аналитических систем с целью совершенствования данных методов и анализа поведения летательного аппарата, включая различного рода ситуации в условиях преодоления запретных зон [2].
Изменение угла dfi
dfi,grad dfi_FK
1,00
0,00
-1,00
-2,00
-3,00
-4,00
-5,00
-6,00
-7,00
Изменение dVx
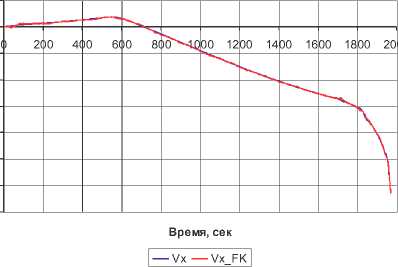
Рис. 1. Погрешности определения широты А ^ и составляющей скорости А Vx
В интересах обоснования путей разрешения проблем построения информационно-аналитических систем управления в условиях мониторинга значительных масштабов, обновления больших массивов геопространственных данных и эффективного выполнения целевого предназначения сложного динамического объекта с использованием методов и алгоритмов языка схем радикалов необходимо решить задачу синтеза методов управления и наведения при одновременной навигации, динамическом построении и обработки проблемно-ориентированных структур пространственных данных движения БПЛА посредством информационно-аналитических систем управления методов и моделей одновременной навигации и построения электронных карт при решении задач управления и наведения для подвижных объектов различной природы в сложных условиях мониторинга и преодоления запретных зон. В результате сравнительного анализа выделен ряд теоретических и экспериментальных методов и средств одновременной навигации, динамического построения карт и коррекции маршрутов движения для разработки комплексных навигационных систем в составе проблемно-ориентированной системы управления с целью мониторинга и анализа ситуаций с высокой степенью неопределённости в рамках концепции SLAM. Предложены комбинированные методы и алгоритмы управления и наведения БПЛА на всех участках полета, использующие сочетание энергетического подхода, свойства инвариантности динамических систем, программно-терминального принципа управления и модифицированного метода требуемых ускорений. Разработаны способы интеграции и комплексирования методов и алгоритмов управления и наведения с использованием оригинальной структуры данных на основе концепции SLAM для геоинформационных аналитических систем и усовершенствована математическая модель ошибок инерциальной навигационной системы в рамках разработки алгоритмов интегрированной системы навигации летательного аппарата. Таким образом, методы и алгоритмы наведения БПЛА на основе сочетания энергетического подхода, свойств инвариантности динамических систем, адаптивных манёвров, программно-терминального принципа управления и метода требуемых ускорений, методы идентификации, адаптации, когнитивных и нейросетевых технологий в приложении к новым возможностям технологий SLAM могут быть использованы автономными транспортными средствами для создания карты в незнакомой обстановке (без априорного знания), или обновления карты в известной среде (с априорного знания из данной карте), и одновременного отслеживания своего текущего местоположения [3].
Стремительное развитие авиационных и ракетно-космических технологий влечет за собой появление новых типов летательных аппаратов и систем, открывает новые возможности при решении ими функциональных задач. В результате такого развития ощущается потребность в создании надежных, компактных и интеллектуальных навигационных комплексов, имеющих относительно низкую стоимость по сравнению с традиционными платформенными инерциальными системами (ИНС) [4, 5]. В настоящее время основным путем создания таких систем является использование глобальных навигационных спутниковых систем GPS/ГЛОНАСС в сочетании с БИНС. Опыт разработчиков показывает, что наиболее приемлемыми для таких объектов управления являются слабо-, жестко- и глубоко интегрированные навигационные системы. Так, переход от «чисто инерциальной» к слабо связанной схеме позволяет существенно повысить точность за счет постоянной коррекции БИНС по данным спутниковой навигационной системы (СНС). Использование жестко связанной схемы дополнительно позволяет улучшить качество слежения за спутниковыми сигналами и снизить время восстановления после срыва слежения. Организация системы по глубоко интегрированной схеме позволяет реализовать преимущества, описанные ранее, при меньших массогабаритных характеристиках и меньшем энергопотреблении, что важно для летательных аппаратов (ЛА) с дефицитом энергетических ресурсов. Необходимо отметить, что жестко- и глубоко связанные схемы не всегда оказываются функционально надежными и могут не обеспечить требуемое качество навигации при длительных перерывах в получении информации от СНС (например, при постановке помех), поэтому в настоящем работе рассматривалась слабосвязанная интегрированная инерциальноспутниковая система как обеспечивающая (по совокупности показателей) более высокую точность, устойчивость слежения и надежность информационного обеспечения по сравнению с другими схемами комплексирования.
В ходе исследований предполагалось, что точность СНС является достаточной для решения ЛА его функциональных задач, поэтому модель погрешностей СНС рассматривалась в самом общем виде – на уровне задания ошибок определения координат и скорости без детализации причин их возникновения. Основное внимание уделялось определению ошибок БИНС и алгоритмам оптимальной фильтрации, обеспечивающим работу интегрированной навигационной системы. В числе погрешностей ИНС рассматривались инструментальные ошибки гироскопов и акселерометров, а также ошибки выставки и ввода начальных условий работы системы. Другие составляющие погрешностей считались пренебрежимо малыми. Инструментальные погрешности ИНС моделировались постоянными составляющими, компонентами, зависящими от перегрузок, а также случайными величинами ошибок акселерометров и параметров, описывающих уходы гироблоков. Ошибки выставки и ввода начальных условий задавались случайными переменными.
В системе реализовывался расширенный фильтр Калмана для 25-мерного вектора состояния. Вектор возмущений системы имел размерность, равную 21. Спутниковая информация включала шесть параметров: координаты и компоненты скорости ЛА, пересчитанные в географическую систему. Для фильтра Калмана при плохой сходимости оценок предусмотрена работа в так называемом режиме ε-механизации. Такой режим в ряде случаев обеспечивает лучшие характеристики сходимости оценок. В результате работы фильтра вычислялась оценка текущих ошибок БИНС в определении координат, скоростей, а также оценки составляющих погрешностей ее акселерометров и гироскопов. На основе полученных оценок корректировались показания БИНС и ее измерительных элементов.
Чтобы сформировать требуемую траекторию полета, обладающую заданными свойствами, системе управления ЛА должны быть заданы законы измерения координат и компонент скорости в какой-либо системе координат. Конкретный вид связи, накладываемой на движение центра масс, и определяющей траекторию движения, определяет метод наведения. Для достижения требуемой эффективности применения ЛА в терминальной точке требовалось обеспечить заданное значение угла наклона траектории, а также величину скорости, лежащей в приемлемом диапазоне. Траектория полета, обладающая указанными свойствами, была получена при использовании модифицированного метода наведения по требуемым ускорениям.
Результаты моделирования работы интегрированной системы навигации показали, что точность определения координат и составляющих вектора скорости определяется точностью спутниковой подсистемы. Сходимость фильтра Калмана при получении оптимальных оценок указанных параметров обеспечивается в течение нескольких секунд. Несколько хуже оказались характеристики сходимость фильтра при расчете систематических составляющих погрешностей БИНС (процесс получения оценок некоторых параметров затягивался до 100-140 с).
Выводы: сопряжение БИНС с СНС позволяет уменьшить систематические погрешности ИНС приблизительно на порядок, если удается обеспечить продолжительность непрерывного сеанса получения измерительной информации по спутниковому каналу в течение 150 и более секунд.
Список литературы Функционирование математической модели ошибок бесплатформенной инерциальной навигационной системы при одновременной навигации, динамическом построении и обработки данных многоструктурных систем управления в рамках разработки алгоритмов интегрированной системы навигации летательного аппарата с использованием GPS / ГЛОНАСС технологий
- Шевцов, С.Н. Обзор современных систем навигации и перспектив их развития, XI Всероссийская научно-техническая конференция и школа молодых ученых, аспирантов и студентов «Научные исследования и разработка в области авиационных, космических и транспортных систем» (АКТ 2010). -Воронеж, 2010. 32 с.
- Шевцов, С.Н. Разработка алгоритмов интегрированной системы навигации летательного аппарата с использованием GPS/ГЛОНАСС технологий/С.Н. Шевцов, Д.В. Доронин//Материалы I Международной научно-практической конференции «Теория и практика в физико-математических науках». -М., 2011. 27 с.
- Рожнов, А.В. Язык схем радикалов в проблемных вопросах предпроектных исследований, оснащения, сопровождения систем и в экспериментальных задачах внедрения критических наукоемких технологий/А.В. Рожнов, А.В. Чечкин, М.В. Пирогов и др.//под ред. А.В. Чечкина и А.В. Рожнова. Коллективная монография. Ч. 2. Изд-во Радиотехника. Тематический выпуск научного журнала Информационно-измерительные и управляющие системы. -М., 2009. 86 с.
- Матвеев, В.В. Основы построения бесплатформенных инерциальных навигационных систем/В.В. Матвеев, В.Я. Распопов. -СПб., «ЦНИИ «Электроприбор», 2009. 98 с.
- Управление и наведение беспилотных маневренных ЛА на основе современных информационных технологий/Под ред. М.Н. Красильщикова и Г.Г. Себрякова. -М.: ФИЗМАТЛИТ, 2005. 135 с.
- Разоренов, Г.Н. Системы управления летательными аппаратами/Г.Н. Разоренов, Э.А. Бахрамов, Ю.Ф. Титов. -М.: Машиностроение, 2003. 584 с.
