Fuzzy Stability and Synchronization of New 3D Chaotic Systems

Author: Masoud Taleb Ziabari, Ali Moarefianpur, Marjan Morvarid
Journal: International Journal of Information Engineering and Electronic Business(IJIEEB) @ijieeb
Article in issue: 5 vol.6, 2014.
Free access
This paper presents fuzzy model-based designs for control and synchronization of new chaotic system. The T–S fuzzy models for new chaotic systems are exactly derived. Then the asymptotic stability and synchronization are achieved by generalized backstepping method. On the other hand, this paper presents fuzzy model-based designs for synchronization of another chaotic system. Based on the T–S fuzzy new chaotic models, the fuzzy controllers for two different chaotic synchronization are designed via the active control technique. Numerical simulation results are presented to show the effectiveness of the proposed method.
T-S Fuzzy Model, Generalized Backstepping Method, Active Control, Stability, Synchronization
Short address: https://sciup.org/15013305
IDR: 15013305
Text of the scientific article Fuzzy Stability and Synchronization of New 3D Chaotic Systems
Published Online October 2014 in MECS
Control of complex irregular dynamics has evolved as one of the central issues in applied nonlinear science during the last decade. Nowadays the notion of chaos control involving stabilization of unstable periodic or stationary states in nonlinear dynamic systems has been extended to a much wider class of problems. Since the discovery of chaos synchronization introduced in [1], there have been tremendous interests in studying the synchronization of chaotic systems. Recently, much research on the fuzzy model-based designs to stability and synchronization for chaotic systems have been carried out based on Takagi–Sugeno (T–S) fuzzy models [2–4]. In [5], a fuzzy model-based designs for Chen’s chaotic stability and synchronization have been proposed. Based on the fuzzy hyperchaotic models, simpler fuzzy controllers have been designed for synchronizing hyperchaotic systems in [6]. In [7], a novel IMRAFC for a class of nonlinear chaotic systems subject to disturbances was proposed. A robust model reference fuzzy controller and the adaptation laws for the identification system were derived using an appropriate Lyapunov function. [8] have considered the problem of synchronizing a class of uncertain nonlinear systems by using adaptive fuzzy sliding mode control technique. In [9], authors have considered the robust stabilization and synchronization problems for nonlinear energy resource systems based on T-S fuzzy model. By designing the fuzzy state-feedback controllers, several sufficient conditions have been obtained to ensure the stability, robust stability and synchronization of nonlinear energy resources systems, respectively. A new adaptive interval type-2 fuzzy neural network (FNN) control for chaos synchronization between two different chaotic systems was proposed to handle the training data corrupted by noise or rule uncertainties involving external disturbances [10]. By investigating synchronization of chaotic systems, the structure of drive-response lag synchronization for fuzzy chaos system based on fuzzy observer was proposed in [11]. A Genetic based Fuzzy PID controller [12] has been proposed to synchronization task of chaotic systems in which one system has been considered as "master" whilst the other system has been treated as "slave" (a perturbed system with uncertainty and disturbance). In [13], two identical generalized Lorenz systems have been synchronized by a fuzzy controller based on mamdani approach and stability of the proposed scheme has been established by the Lyapunov stability theorem. In [14], the new 3 dimensional chaotic system was first investigated and then utilized an intelligent controller based on brain emotional learning (BELBIC), this new chaotic system was synchronized. In [15], stabilization and synchronization problem of the new hyperchaotic system was investigated. state dependent Riccati equation (SDRE) was applied to new hyperchaotic system in three ways. Stabilized system with know parameters, stabilized system with unknow parameters, sysnchronized system.
The rest of the paper is organized as follows. In Section 2, the T–S fuzzy models will be presented for a new 3D chaotic system. In Section 3, fuzzy stability of chaotic system is presented. In Section 4, synchronization between two new fuzzy chaotic system is achieved by generalized backstepping method is described. In Section 5, synchronization between two different fuzzy chaotic systems is achieved by active control. Finally, Section 6 provides, conclusion of this work.
-
II. T–S fuzzy model of new 3D chaotic system
The T–S fuzzy dynamic model originates from Takagi and Sugeno [16], which is described by fuzzy IF-THEN rules where the consequent parts represent local linear models. Consider a continuous-time nonlinear dynamic equation as follows:
x (t) = f(x(t)) + g(x(t))u(t) (1)
Then the T–S fuzzy model is composed of the following rules:
Rule i: If z 1 (t) is Mt1 & — & zp(t) is Mip then x (t) = Atx(t) + Bu(t), i = 1,2, —, r. (2)
Where Z 1 (t)~Zp(t) are the premise variableswhich would consist of the states of the system, Мц (j = 1, 2, ..., p) are fuzzy sets, r is the number of fuzzy rules, A , , В are system matrices with appropriate dimensions. The final output of the fuzzy system is inferred as follows:
x (t) = Z [ = i ii(z(t))(A/x(t) + Bu(t)) (3)
Where,
p hi(z(t)) = ЕГ^1^^)) , Wi(z(t)) = ПМ/7' ^(t))
1 1 (4)
Lemma [17]. The equilibrium of the continuous fuzzy system (3) with u(t) = 0 is globally asymptotically stable if there exists a common positive definite matrix P such that
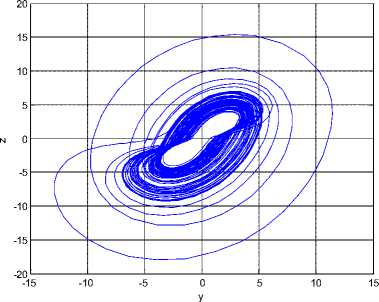
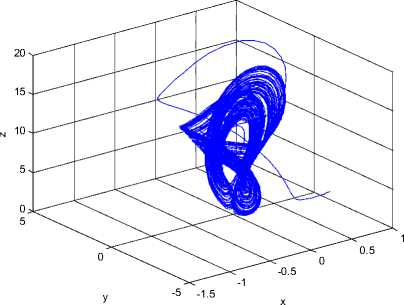
Fig 1. Strange attractors system (6)
A f P + PA , <0, i = 1,2, —, r (5)
that is, a common P has to exist for all subsystems.
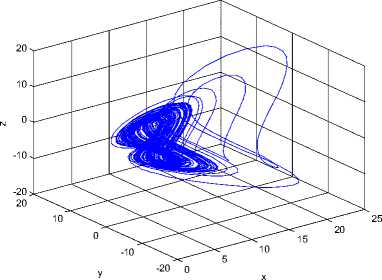
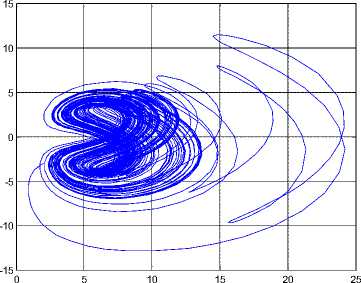
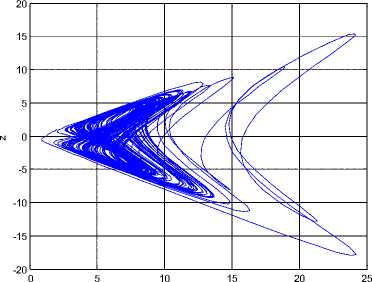
Recently, Sara Dadras and Hamid Reza Momeni constructed the 3D autonomous chaotic system [18]. The system is described by.
x = у - ax + byz у = су - xz + z (6)
Z = dxy - hz
Where a, b, с, d, h are positive constants and x, y, z are variables of the system, when a = 3, b = 2.7, с = 4.7, d = 2, h = 9, the system (6) is chaotic. See Figure 1.
Assume that x £ [-g, g], у £ [-g, g] and g > 0, then system (6) can be exactly represented by T–S fuzzy model as following:
Rule 1: if x is M 1 & у is N 1 then X ( t) = A 1 X (t)
Rule 2: if x is M 1 & у is N2 then X (t) = A2X(t)
Rule 3: if x is M2 & у is N 1 then X (t) = A3X(t)
Rule 4: if x is M2 & у is N2 then X (t) = A4X (t) (7)
Here,
X = [x у z]T
M, (x) = 1 (1+ x ) ,M2 (x) = 1 (1 - x )
2 g 2 gj
Ni№ = K1 + ;И« = K1 - f) (8)
And states matrixes are:
Rule 1: if x is M 1 & у is N 1 then X (t) = A 1 X(t) +
Bu(t)
Rule 2: if x is M 1 & у is N2 then X (t) = A2X(t) +
Bu(t)
Rule 3: if x is M2 & у is N 1 then X (t) = A3X(t) +
Bu(t)
Rule 4: if x is M2 & у is N2 then X (t) = A4X(t) +
Bu(t) (11)
B -0
Where
According to the Generalized
Backstepping Method [19, 20] theorem, the control signal will be obtained:
Г -a 1 bg
A 1 = I 0 c 1 - gl 0 dg -h
Г -a 1 -bg I
A2 = I 0 c 1 -gl 0 dg -h [-a 1 bg 0 c 1 + g
0 -dg -h .
|
—a |
1 |
-bg" |
||
|
A 4 = |
0 |
c |
1 + g |
(9) |
|
. 0 |
-dg |
-h . |
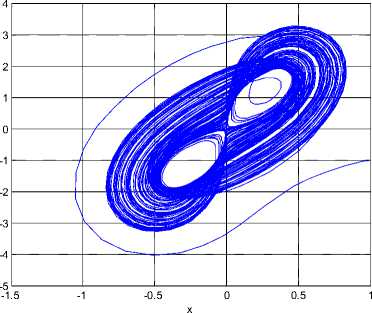
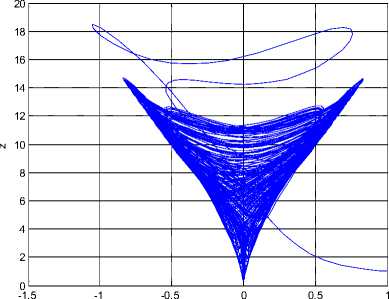
That g = 30. So the final output of the fuzzy system (7) is inferred as follows and the chaotic behavior is shown in Figure 2.
X (t) = T. 4= 1Mi(x)Ni(у)AiX(t) (10)
To support our analysis to be carried out in the following sections, some existing results are needed.
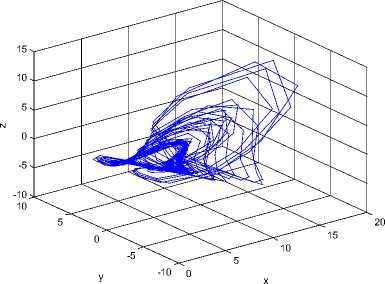
Fig 2. Chaotic behavior of fuzzy system (7).
-
III. Fuzzy stability of new chaotic system
For new chaotic fuzzy system (7), the following fuzzy controller is used to stabilize it.
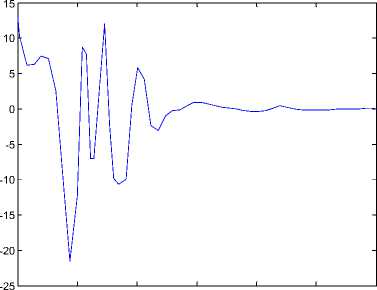
Figure 3 shows that (x, у, z) states of new fuzzy chaotic system (7) can be stabilized with the control laws u (12) to the origin point(0,0,0). The time response of the control input u for the stabilization new fuzzy chaotic system (7) shown in Figure 4.
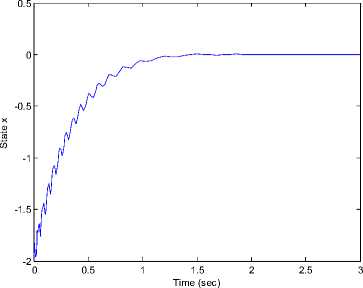
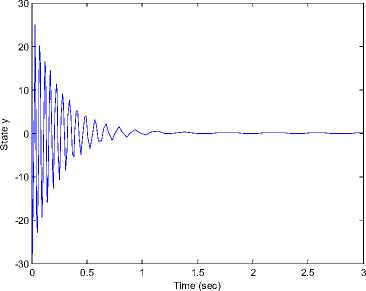
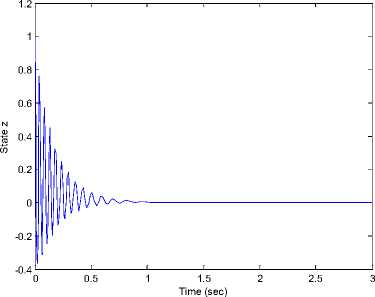
Fig 3. The time response of the states (x, y, z) for the controlled new fuzzy chaotic system (7) where the control inputs is (12).
P =I
' 0.1429
—0.714
.61.9693
—0.714
0.2143
— 274.9887
61.9693 —274.9887 200466.879
I (16)
IV. Fuzzy Synchronization Of New Chaotic System
In order to achieve the behavior of the synchronization between two new fuzzy chaotic system by using the generalized backstepping metod, suppose the drive system (7) and the slave system takes the following from.
■ t
t
Rule 1: if x is M 1 & y is N 1 then X(t) = A 1 X(t) + Bu(t)
■ t
t
Rule 2: if 5c is M 1 & y is N 2 then X(t) = A 2 X(t) + Bu(t)
■ t
t
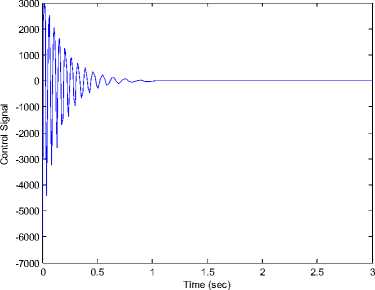
Fig 4. The time response of the control input .
Substituting equation (12) into equation (11) yields.
Rule 3: if 5c is M 2 & y is N 1 then X(t) = A3X(t) + Bu(t)
■ t
t
Rule 4: if 5c is M 2 & y is N 2 then X(t) = A4X(t) + Bu(t)
Where
X = [5c y Z]T, u ( t) = [u i (0 u 2 ( t )] T,
B -E -I
Then the defuzzification process is given as
X(t) = T. i=i MtUc)N (y) (AtX (t) + Bu(t))
Rule 1: if 5 is M 1 & y is N 1 then X (t) = A 1 X(t) Rule 2: if 5 is M 1 & y is N 2 then X (t) = A 2 X(t) Rule 3: if 5 is M 2 & y is N 1 then X (t) = A3X(t) Rule 4: if 5 is M 2 & y is N 2 then X (t) = A4X(t)
Assume that e(t) = X(t) — X(t), we obtain
Where
e ( t) =
1. 4=1 Mt(x)N i (y)AtX(t) — X 4=i Mt(x)N i (y) (A ; X(t) +
Bu(t)) (20)
A i
A 2
A 3
A 4
|
— d |
1 |
bg |
|
dbg — 1 |
—bg — 1 |
—dg — bg — ( bg) |
|
0 |
dg |
—h |
|
— d |
1 |
—bg |
|
—dbg — 1 |
bg — 1 |
—dg + bg — ( bg) |
|
0 |
dg |
—h |
|
— d |
1 |
bg " |
|
dbg — 1 |
—bg — 1 |
dg — bg — ( bg)2 |
|
0 |
—dg |
—h |
|
— d |
1 |
—bg " |
|
—dbg — 1 |
bg — 1 |
dg + bg — ( bg)2 |
|
0 |
—dg |
—h |
. 2
. 2
We select Q = I3X3 and the matrix P will be obtained:
According to the Generalized Backstepping Method theorem, the control signals will be obtained:
Rule 1: if 5c is M1 & y is N then [ u 1 (t) ] = u 2 (t)J
[ d — 2
I — ( bg + 1)
— (c + 3) —(bg — g + 1)1
—dg h— 2 ]e(t)
Rule 2: if 5c is MT & y is N2 then [ u 1 (t )] = u 2 (t)J
d ■
I bg
—
—
■ 1
—(c + 3) bg + g
—dg
h —
2 1]e(t)
Rule 3: if x is M2 & y is N then [ u 1 (t) l = 2 1 ^(t)
A{P + PA i = —Q, i = 1,2,3,4
Г d — 2
[— ( bg + 1)
— (c + 3) —(bg + g + 1)
dg h— 2 ]e(t)
Rule 4: if x is M2 & у is N2 then
Г u — 2
I bg — 1
—(c + 3) dg
bg — g — h — 2
[u i ( t) L u2 ( t)
1] e(t)
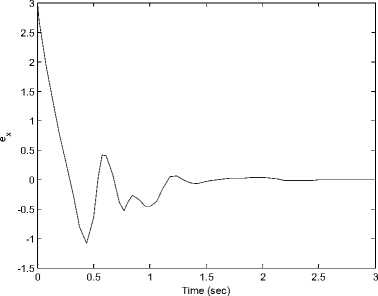
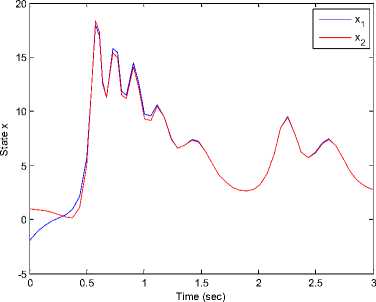
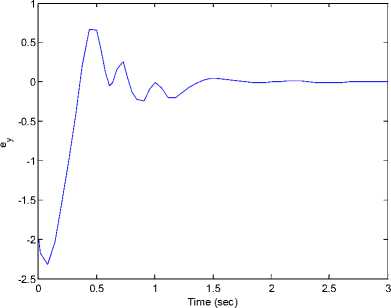
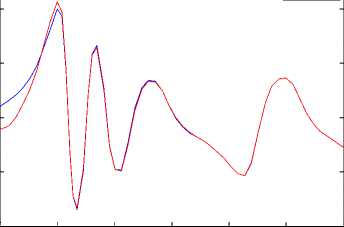
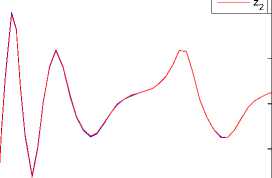
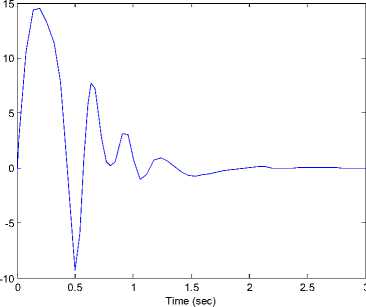
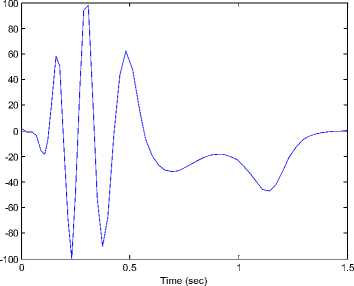
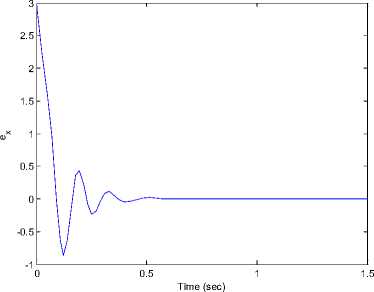
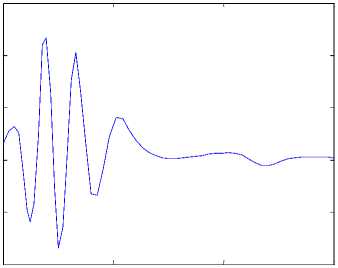
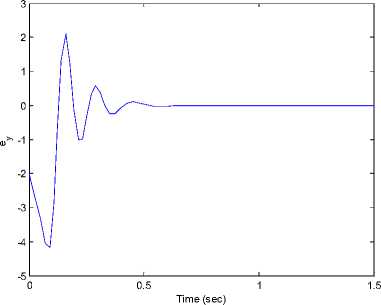
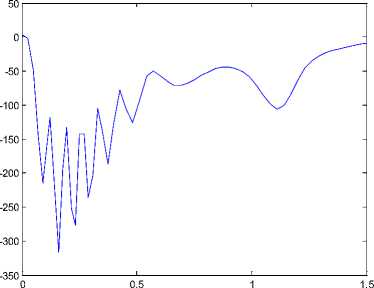
The initial values of the the drive and response systems are x 1 (0) = —2,у 1 (0) = 1,z 1 (0) = —3 and x2(0) = 1, у2(0) = — 1, z2(0) = 1 respectively. The time response of x, у, z states for drive system (7) and the response system (17) shown in Figure 5. Synchronization errors (ex, ey, ez) in the new fuzzy chaotic systems shown in Figure 6. The time response of the control inputs (u 1 , u2) for the synchronization new fuzzy chaotic systems shown in Figure 7.
y1 y2
0 0.5 1 1.5 2 2.5 3
Time (sec)
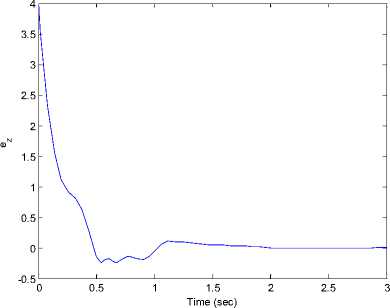
Fig 6. Synchronization errors (ex, ey, ez) in drive system (7) and response system (17).


-15
2 2.5
Time (sec)
Fig 5. The time response of signals (x, у, z) for drive system (7) and response system (17).
0 0.5
1 1.5 2
Time (sec)
Fig 7. The time response of the control inputs (U1, u2) for drive system (7) and response system (17).
Substituting equation (21) into equation (17) yields.
Rule 1: If x is M 1 & у is N 1 then e(t) — A1e(t')
Rule 2: if x is M 1 & у is N2 then e(t) — A2e(t)
Rule 3: if x is M2 & у is N 1 then e (t) = A3e(t)
Rule 4: if x is M2 & у is N2 then e(t) — A4e(t) (22)
Where
A 1 — A 3
A 2 — A 4
—a 1 bg a — 2 —3 -bg
-(bg +1) 0 —2
—a 1 —bg a — 2 — 3 bg bg — 1 0 —2
We select Q — 73x3 and the matrix P will be obtained:
|
A T p + PA ; — |
—Q , |
i — |
1,2,3,4 |
(24) |
|
|
г 119 |
13 |
-5-| |
|||
|
576 |
192 |
96 |
|||
|
p — |
21 192 |
109 576 |
- 96 |
(25) |
|
|
-5 |
-1 |
1 |
|||
|
- 96 |
96 |
4 ^ |
|||
-
V. Fuzzy Synchronization Of Two Different Chaotic System
Recently, Chunlai Li, Hongmin Li and Yaonan Tong constructed the 3D autonomous chaotic system [21]. The system is described by.
x — —ax + byz у — су — fxz Z — йу2 — hz
Where a, b, с, й, f, h are positive constants and x, у, z are variables of the system, when a — 16, b — 0.5, с — 10, й — 18, f — 6, h — 5, the system (26) is chaotic. See Figure 8.
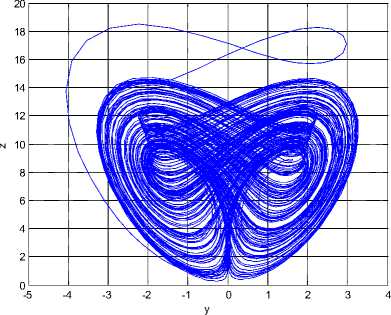
Fig 8. Strange attractors system (26)
Assume that x £ [—5,5], у £ [—5,5] and 5 > 0, then
|
system (26) can be exactly represente |
d by T–S |
fuzzy |
Master Sуstem: |
|||||
|
model as following: Rule 1: if x is Mi & у Rule 2: if x is Mi & у Rule 3: if x is M2 & у Rule 4: if x is M2 & у Here, X M i (x)=| (1 N 1 (у)= | (1 And states matrixes are A i = A 2 = A 3 = A 4 = That 5 = 30. So the (27) is inferred as fol shown in Figure 9. |
is Ni then X (t) = is N2 then X (t) = is Ni then X (t) = is N2 then X (t) = [x у zf + x) ,M2(x)=| 5/ 2 +;>« = ! ( —a 0 b5 0 c —f5 0 d5 —h
0 c —f5 0 —^5 —h —a 0 b5 0 c f5 0 d5 —h
0 c f5 0 —d5 —h final output of t lows and the cha |
= A4X(t) (27) (1—5) 1 Ч) (28) (29) he fuzzy system otic behavior is |
Rule 1: if x is Mi "—a i 0 b i 5 0 Ci —fa 0 d 1 5 —hi Rule 2: if x is Mi —a i О —b 0 C i —f 0 —d i 5 — Rule 3: if x is M2 "—a i 0 b i 5" 0 C i f i 5 0 di5 —hi Rule 4: if x is M2 —a i О —b 0 C i f i 0 —d i 5 — And Slave Sуstem: Rule 1: if 5c is Mi " —a 2 1 b 2 5 0 C 2 1 — . 0 d 2 5 —h2 Rule 2: if 5c is Mi " —a 2 1 —b 2^ 0 C 2 1 — . 0 d25 —h2 |
& & i 5 i.9 h i & X & i 5 5 h i & 5 & 5 l |
v is Ni then X(t) = X(t) v is N2 then X (t) = X(t) И is Ni then X (t) = (t) И is N2 then X (t) = X(t) c is Ni then X (t) = )t(t) + Bu(t) c is N2 then Xi (t) = X(t) + Bu(t) |
(31) |
||
|
X (t) = Z 4=i M/ (x)N; (у)A/X(t) (30) To support our analysis to be carried out in the following sections, some existing results are needed. |
Rule 3: if xc is M2 & " —a 2 1 b 2 5 0 C 2 1 + 5 - 0 —d 2 5 —h 2 |
c is Ni then X (t) = X(t) + Bu(t) |
||||||
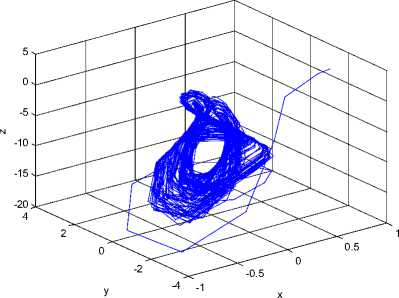
Fig 9. Chaotic behavior of fuzzy system (27).
Suppose the master and slave systems takes the following from
I 0 C 2 1 + 5lX(t) + Bu(t) (32)
0 — ^ 2 д —h 2
Where
u(t) = [u^t) U 2 ( t) U 3 ( t)]T
10 0
В = I0 1 0l (33)
L 001
Assume that e(t) = X(t) — X(t), we obtain
e ( t) =
Z 4=i M/ (x)Ni(у)AiX(t) — Z 4=1 Mt(x)Nt (у) (AtX(t) +
Bu(t)) (34)
Rewrite the equation (34), we obtain
Rule 1: if x is Mi & у is Ni then e(t) = Aie(t) +
AiX(t) + Bu(t)
Rule 2: if x is Mi & у is N2 then e (t) = A2e(t) +
A2X(t) + Bu(t)
Rule 3: if x is M2 & у is N 1 then e(t) — A3e(t) +
A3X(t) + Bu(t)
Rule 3: if x is M2 & у is N1 then
|
" u i (t)" u 2 (t) , u 3 ( t ) |
— — |
A 3 X(t) + B |
" U i (t)" ^ 2 (t) , V 3 ( t). |
& |
" V i (t) V 2 (t) . v 3 ( t). |
— |
|
—a2 |
+ k i |
1 |
b 2 9 |
|||
|
— |
0 |
C 2 + k 2 |
1 + 9 e(t) |
|||
|
0 |
—d 2 9 |
— h 2 + |
k 3 |
|||
|
Rule 4: if x is M2 & у is N2 |
then e(t) = A4 |
e ( t) + |
|
|
A4X(t) + Bu(t) |
(35) |
||
|
Where |
|||
|
г —U 2 1 b 2 9 1 |
|||
|
A i = 1 0 C 2 1 — 9 1 |
|||
|
L 0 ^ 2 9 —h 2 j |
|||
|
ai — a2 1 |
( b 2 — b i )9 |
||
|
A i — |
0 C 2 — C 1 |
f i 9 — 1 + 9 |
|
|
0 ( ^ 2 — d i )9 |
h i — h 2 _ |
||
|
Г — ^ 2 1 —b 2 9] |
|||
|
A 2 — 1 0 C 2 1 — 9 1 |
|||
|
L 0 d29 —h2 J |
|||
|
ai — a2 1 |
( b i — b 2 )9 |
||
|
A 2 — |
0 C 2 — C 1 |
f i 9 — 1 + 9 |
|
|
0 (d i — ^ 2 )9 h i — h- 2 |
|||
|
—a 2 1 b 2 9 " |
|||
|
A 3 — |
0 C 2 1 + 9 |
||
|
0 —^ 2 9 —h2 - |
|||
|
a i — a 2 1 |
( b 2 — b i )9 |
||
|
A 3 — |
0 C 2 — C 1 |
1 + 9 — f i 9 |
|
|
0 (d 2 — d i ) 9 h i — h 2 |
|||
|
—a 2 1 —b 2 9" |
|||
|
A 4 — |
0 C 2 1 + 9 |
||
|
0 —^ 2 9 —h2 - |
|||
|
a i — a 2 1 |
( b i — b 2 )9" |
||
|
A 4 = |
0 C 2 — C i |
1 + 9 — f i 9 |
(36) |
|
0 ( d i — d 2 )9 |
h i — h2 _ |
||
According to the Active Control Method, the control signals will be obtained:
|
Rule 4: if x is M2 & у is N2 then |
|
u i ( t)l r^ i ( t)l pi ( t ) |
|
u 2 ( t) — —A 4 X(t) + B V 2 ( t) & V 2 ( t) — |
|
. u3 ( t)J Р3(0] |т3(0 |
|
— a 2 + k i 1 —b 2 9 |
|
— 0 C 2 + k 2 1 + 9 e(t) |
|
0 —d 2 9 —h 2 + k 3 |
Where k [ , i — 1,2,3 are positive gains. We select the gains of controllers (37) ki — 10, k2 — 10, k3 — 10. The initial values of the the drive and response systems are xi(0) = 2.2, у1(0) = 2.4, zi(0) = 3 and x2(0) = -2.2,у2 (0) = -2.4, z2 (0) = —3 respectively. The time response of x, у, z states for drive system (31) and the response system (32) shown in Figure 10. Synchronization errors ^ex, e ^ , ez) shown in Figure 11. The time response of the control inputs (ui, u2, u3) for the synchronization two different fuzzy chaotic systems shown in Figure 12.
Rule 1: if x is Mi & у is Ni then
u i ( t ) u 2 ( t) u3 ( t)
—A i X(t) + в
-Й 2 + k i 1
0 C 2 + ^ 2
0 ^ 2 9
U i ( t ) V 2 ( t) . V3 ( t)
b 2 9
1 — 9
'V;U') V 2 ( t) . V3 ( t)
e ( t)
-h 2 + k 3
Rule 2: if x is Mi & у is N2 then
|
u i (t) u 2 (t) u 3 (t) |
— —A 2 X ( t) + в |
v i (t)" ^ 2 (t) . v3 ( t). |
& |
V i (t) ^ 2 ( t) . ^ 3 ( t) |
||
|
[ —a 2 |
+ k i |
1 |
—b 2 9 |
|||
|
1 |
0 |
C 2 + k 2 |
1 — 9 |
e ( t) |
||
|
0 |
d 2 9 — |
h 2 + k 3 |
||||
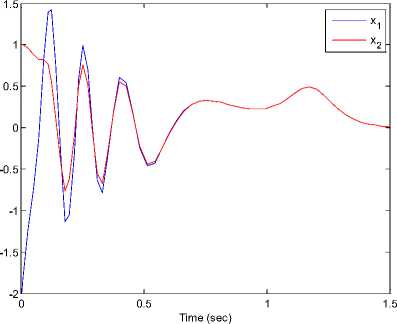
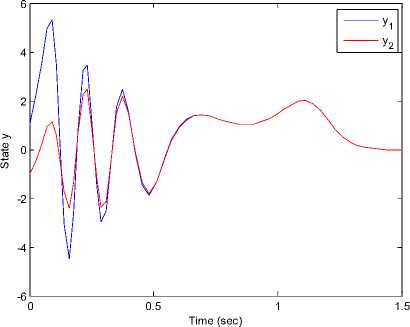
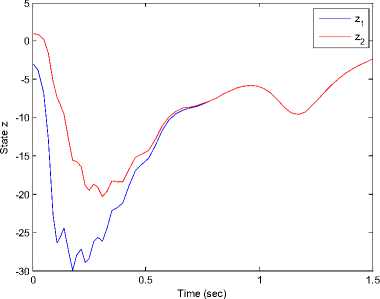
Fig 10. The time response of signals (%, y, z) for drive system (31) and response system (32).
-50
1.5
Time (sec)
-100
Time (sec)
Fig 12. The time response of the control inputs (u 1 , u2, u3) for drive system (31) and response system (32).
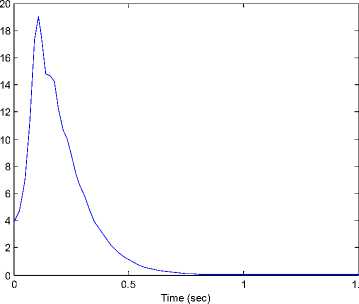
Fig 11. Synchronization errors (ex, ey, e7^ in drive system (31) and response system (32).
Substituting equation (37) into equation (32) yields.
Rule 1: If 5c is M 1 & y is N 1 then e(t) = A 1 e(t)
Rule 2: if 5c is M 1 & y is N2 then e (t) = A2e(t)
Rule 3: if 5c is M2 & y is N 1 then e (t) = A3e(t)
Rule 4: if 5c is M2 & y is N2 then e(t) = A4e(t) (38)
Where
г-ki0
A1 = A2 = A3 = A4 = I 0
-k 3
I
We select Q = 73x3 and the matrix P will be obtained:
A?P + PAt = -Q, i = 1,2,3,4 (40)
Р = 20 1 3X3 (41)
-
VI. Conclusion
In this paper, a fuzzy model-based designs for new 3D chaotic stability and synchronization have been proposed. Based on the fuzzy chaotic models, simpler fuzzy controllers have been designed for stabilizing and synchronizing new chaotic systems via generalized backstepping method. Then the synchronization of two different chaotic system are achieved by solving active control. Finally, numerical simulation was given to verify the effectiveness of the proposed controllers.
References Fuzzy Stability and Synchronization of New 3D Chaotic Systems
- L. M. P. a. T. L. Carroll, Synchronization in chaotic systems, Phys. Rev. Lett., 64,, pp. 821-824, 1990.
- C.-W. Park, C.-H. Lee, M. Park, Inform. Sci. 147 (2002) 245.
- L. Chen, G. Chen, Y.-W. Lee, Inform. Sci. 121 (1999) 27.
- K.-Y. Lian, C.-S. Chiu, T.-S. Chiang, P. Liu, IEEE Trans. Fuzzy Systems 9 (4) (2001) 539.
- Yan-Wu Wang, Zhi-Hong Guan, Hua O. Wang, LMI-based fuzzy stability and synchronization of Chen's system, Physics Letters A 320 (2003) 154–159.
- Hongbin Zhang, Xiaofeng Liao, Juebang Yu, Fuzzy modeling and synchronization of hyperchaotic systems, Chaos, Solitons and Fractals 26 (2005) 835–843.
- Mojtaba Ahmadieh Khanesar, Mohammad Teshnehlab, Okyay Kaynak, Control and synchronization of chaotic systems using a novel indirect model reference fuzzy controller, Soft Comput, DOI 10.1007/s00500-012-0810-z.
- Xiulan ZHANG, Fengyun ZHANG, Synchronizing Uncertain Chaotic Systems by Using Adaptive Fuzzy Chattering Free Sliding Mode Control, Journal of Computational Information Systems 8: 24 (2012) 10509–10515.
- Yonghui Sun, Zhinong Wei, Guoqiang Sun, Ping Ju, and Shuaidong Huang, Robust Stabilization and Synchronization of Nonlinear Energy Resource System via Fuzzy Control Approach, International Journal of Fuzzy Systems, Vol. 14, No. 2, June 2012.
- Tsung-Chih Lin and Kang-Wei Hsu, A NEW ADAPTIVE H1 CONTROL FOR CHAOS SYNCHRONIZATION BETWEEN TWO DIFFERENT CHAOTIC SYSTEMS, International Journal of Innovative Computing, Information and Control, Volume 8, Number 1(B), January 2012, pp. 701-714.
- Lin-jun TANG, DongLI, Han-xing WANG, Lag synchronization for fuzzy chaotic system based on fuzzy observer, Appl. Math. Mech. -Engl. Ed. 30(6), 803–810 (2009).
- Yaghoub Heidari, Soheil Salehi Alashti, Rouhollah Maghsoudi, Chaos Synchronization of two Uncertain Chaotic System Using Genetic Based Fuzzy Adaptive PID Controller, The Journal of Mathematics and Computer Science Vol .1 No.4 (2010) 273-286.
- Davood Babaei Pourkargar, Mohammad Shahrokhi, Optimal Fuzzy Synchronization of Generalized Lorenz Chaotic Systems, The Journal of Mathematics and Computer Science Vol .2 No.1 (2011) 27-36.
- Alireza Sahab, Masoud Taleb Ziabari, Intelligent Controller for Synchronization New Three Dimensional Chaotic System, I.J. Modern Education and Computer Science, 2014, 7, 40-46.
- Masoud Taleb Ziabari, Ali Reza Sahab, Control and Synchronization of Hyperchaotic System based on SDRE Method, I.J. Information Engineering and Electronic Business, 2014, 3, 44-50.
- T. Takagi, M. Sugeno, IEEE Trans. Systems Man Cybernet. 15 (1) (1985) 116.
- K. Tanaka, H.O. Wang, Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality Approach, Wiley, New York, 2001.
- Sara Dadras, Hamid Reza Momeni, A novel three-dimensional autonomous chaotic system generating two, three and four-scroll attractors, Physics Letters A 373 (2009) 3637–3642.
- Ali Reza Sahab and Mohammad Haddad Zarif, Improve Backstepping Method to GBM, World Applied Sciences Journal 6 (10): 1399-1403, 2009.
- Ali Reza Sahab, Masoud Taleb Ziabari and Mohammad Reza Modabbernia, A novel fractional-order hyperchaotic system with a quadratic exponential nonlinear term and its synchronization, Advances in Difference Equations 2012, 2012:194.
- Chunlai Li, Hongmin Li, Yaonan Tong, Analysis of a novel three-dimensional chaotic system, Optik - Int. J. Light Electron Opt. (2012), http://dx.doi.org/10.1016/j.ijleo.2012.04.005.
