Гашение вынужденных поперечных колебаний упругой балки с помощью нескольких стационарных актьюаторов

Автор: Атамуратов А.Ж., Михайлов И.Е., Таран Н.А.
Статья в выпуске: 2, 2018 года.
Бесплатный доступ
Методы управления колебаниями элементов сложных механических систем, таких как струны, мембраны, балки, пластины, начали интенсивно развиваться с 70-х годов прошлого столетия. В частности, колебания балки моделируются уравнением в частных производных четвёртого порядка, гиперболическим по Петровскому. Минимизируемым функционалом является интеграл энергии колеблющейся балки. Управление осуществляется с помощью некоторой функции, входящей в правую часть уравнения. Ранее было показано, что решение задачи существует при любом заданном времени гашения, однако с уменьшением этого времени нахождение оптимального управления усложняется. Для получения приближенных численных решений рассматривались так называемые точечные актьюаторы. Было рассмотрено управление с помощью одного точечного актьюатора, помещенного в некоторой точке балки, однако оказалось, что в этом случае осуществить гашение не всегда возможно. Поэтому было также рассмотрено управление с помощью точечного актьюатора, перемещающегося по небольшому участку балки. Однако практическая реализация такого актьюатора весьма затруднительна. В настоящей работе численное гашение колебаний балки осуществляется с помощью нескольких неподвижных точечных актьюаторов. Разработаны вычислительные алгоритмы на основе метода матричной прогонки и метода отыскания минимума функций многих переменных Марквардта. Для отыскания хорошего начального приближения при минимизации интеграла энергии используются эмпирические функции с небольшим числом переменных. Это позволило существенно уменьшить время расчета одного примера. Приводятся примеры расчетов гашения колебаний с различным числом актьюаторов. Показано, что амплитуда колебаний любых управляющих функций возрастает с уменьшением заданного времени гашения. Приводятся примеры гашения колебаний при наличии ограничений на управляющие функции, в этом случае существует минимальное время гашения. Рассмотрено гашение колебаний в случае, когда на разных временных промежутках гашения колебаний включаются разные комбинации актьюаторов.
Стационарные точечные актьюаторы, метод матричной прогонки, метод марквардта
Короткий адрес: https://sciup.org/146281862
IDR: 146281862 | УДК: 539.3 | DOI: 10.15593/perm.mech/2018.2.01
Numerical damping of oscillations of beams by using multiple point actuators
Methods of damping the oscillations of complex mechanical systems’ elements, such as strings, membranes, beams, plates, have intensively been developing since the 1970s. In particular, the beam oscillations are modeled by the fourth-order partial differential equation, which is Petrovsky-hyperbolic. The minimized functional is the energy integral of an oscillating beam. Control is implemented via certain function appearing in the right side of the equation. Previously, it was shown that the solution of the problem exists for any given damping time, but as soon as this time decreases, the optimal control becomes more complicated. To obtain approximate numerical solutions, the so-called point actuators were considered. Control was considered via single point actuator placed at some point of the beam, but in this case it turned out that it is not always possible to dampen it. Therefore, control was also considered via point actuator moving along a small section of the beam. However, the implementation of such an actuator is very difficult. In this work, the numerical damping of beam oscillations is implemented via several fixed point actuators. Computational algorithms have been developed on the basis of the matrix sweep method and the second order Marquardt minimization method of finding the minimum of functions of many variables. To find a good initial approximation, when minimizing the energy integral, empirical functions with a small number of variables are used. This made it possible to significantly reduce the calculation time of the task. The examples of damping the oscillations via a different number of actuators are given. It is shown that the amplitude of the oscillations of any control functions increases with the reduction of the given damping time. The examples of damping the oscillations in the presence of constraints on control functions are given; in this case the minimum damping time exists. The damping of oscillations is considered also in the case when different combinations of actuators are switched on at different time intervals of oscillation damping.
Текст научной статьи Гашение вынужденных поперечных колебаний упругой балки с помощью нескольких стационарных актьюаторов
ВЕСТНИК ПНИПУ. МЕХАНИКА № 2, 2018PNRPU MECHANICS BULLETIN
Methods of damping the oscillations of complex mechanical systems’ elements, such as strings, membranes, beams, plates, have intensively been developing since the 1970s. In particular, the beam oscillations are modeled by the fourth-order partial differential equation, which is Petrovsky-hyperbolic. The minimized functional is the energy integral of an oscillating beam. Control is implemented via certain function appearing in the right side of the equation. Previously, it was shown that the solution of the problem exists for any given damping time, but as soon as this time decreases, the optimal control becomes more complicated. To obtain approximate numerical solutions, the so-called point actuators were considered. Control was considered via single point actuator placed at some point of the beam, but in this case it turned out that it is not always possible to dampen it. Therefore, control was also considered via point actuator moving along a small section of the beam. However, the implementation of such an actuator is very difficult.
In this work, the numerical damping of beam oscillations is implemented via several fixed point actuators. Computational algorithms have been developed on the basis of the matrix sweep method and the second order Marquardt minimization method of finding the minimum of functions of many variables. To find a good initial approximation, when minimizing the energy integral, empirical functions with a small number of variables are used. This made it possible to significantly reduce the calculation time of the task. The examples of damping the oscillations via a different number of actuators are given. It is shown that the amplitude of the oscillations of any control functions increases with the reduction of the given damping time. The examples of damping the oscillations in the presence of constraints on control functions are given; in this case the minimum damping time exists. The damping of oscillations is considered also in the case when different combinations of actuators are switched on at different time intervals of oscillation damping.
1. Постановка задачи
Целью данной работы является разработка численных методов гашения вынужденных поперечных колебаний балки с помощью нескольких стационарных ак-тьюаторов. Поперечные колебания балки описываются гиперболическим по Петровскому уравнением [1, 2]
u„ =- a2 u + g ( x , t ) , ( x , t ) e
-
еП={° - x -1 ’° - t - T }•
Здесь время t и линейный размер x отнесены к характерным величинам t* и x*. Начальные отклонение и скорость перемещения балки u 11=° = h° (x)’ut 11=° = hi (x)’° - x - l(1
мы будем рассматривать как начальные возмущения. На концах балки накладываются условия шарнирного закрепления
-
u Ix=° = uxx Ix=° = °,u Ix=i = uxx Ix=i = °’° - t- T -
- Энергия колеблющейся балки находится как
l
-
L (t) = J [u2 (x’ t) + a4uxx (x’ t )] dx -
- °
Задача управления заключается в возможности перевести систему (1.1)–(1.3) из начального состояния в некое произвольное состояние. Следуя Ж. Лионсу [3], данное свойство системы будем называть строгой управляемостью. Задача гашения колебаний заключается в том, что бы найти управляющую функцию g ( x , t ) , переводящую балку из состояния (1.2) в состояние
u L=r= °,U L=r= °,° - x -1 (1-5)
за время T .
Таким образом, задача гашения колебаний заключается в нахождении оптимальной управляющей функции g ( x , t ) e L ( ( °, l ) x ( °, T ) ) такой, что для любых началь- °
ных возмущений h0(x) e W1 (°,l),h (x) e L2 (°,l)
L (T ) = °. (1-6)
Методы гашения колебаний элементов сложных механических систем начали интенсивно развиваться в 70-х годах XX века. Наиболее значимыми были работы Д. Лагнесса [4], Д. Рассела [5], А. Бутковского [6], в которых рассматривалась задача гашения колебаний струны и получены условия существования решения задачи. В частности, А. Бутковский предложил использовать для гашения колебаний струны точечный акть-юатор, моделируемый функцией g (x, t) = w(t) 5 (x - x0), где 5 - дельта-функция Дирака; x0 - точка помещения актьюатора; w(t) - управляющая функция. Однако в дальнейшем он показал, что в случае возникновения решения (1.1) в виде стоячих волн, если x попадает в узел стоячих волн, то решения задачи может и не существовать. Чтобы избежать такой ситуации, Л. Муравей [7, 8] предложил использовать точечный актьюа-тор, перемещающийся по небольшому участку струны, однако практическая реализация такого актьюатора весьма затруднительна. В работе [9] показано, что решение задачи существует для любого времени Т, однако с уменьшением Т нахождение оптимального управления усложняется. Исследования по гашению колебаний различных механических систем продолжают активно развиваться вплоть до настоящего времени [10–19].
В данной работе рассматривается возможность гашения колебаний балки с использованием нескольких стационарных точечных актьюаторов. В качестве управляющей функции будем рассматривать р стационарных точечных актьюаторов
p g (x, t ) = ^ w( t )5(x - x,), (1.7) i=1
где w ( t ) , i' = 1,..., p - управляющие функции; 5 -дельта-функции Дирака. Мы будем предполагать, что w ( t ) e L 2 ( 0, T ) , i = 1,..., p .
u (0, t ) = 0, u (I, t ) = 0, v (0, t ) = 0, tp
v (1 , t ) = j£ f ( l , t ) dt • (2.4)
0 i = 1
Для численного интегрирования (2.3), (2.4) будем использовать метод трапеций [22].
Построим конечно-разностную схему для приближённого решения системы (2.1). Разобьём рассматриваемую область на прямоугольные ячейки параллельными прямыми xm = m • h , m = 0,..., Nx , tn = n • h , n = 0,..., NT ,
lT где h =-- и h = — . На этой сетке введем сеточные x NX t NT функции {un, vn} . Аппроксимируем уравнения (2.2) со
вторым порядком следующими конечно-разностными соотношениями [23]:
un + 1 m
h t 2
<
V n + 1 m
ht
a u m - 1 - 2 u m + u m + 1
2 L h x
. u m + 1 - 2 u m + 1 + u m + 1 1 f m+ y r
hx J 2
Если ввести обозначения
ym n
Г um) I vm J
(2.5)
2. Численное решение начально-краевой задачи для уравнения колебаний упругой балки
Уравнение (1.1) можно свести к системе двух уравнений второго порядка [20, 21]
ut
<
vt
= av xx ,
p
= -auxx +E fi (x, t), i=1
(2.1)
где
fi (x, t ) = <
: )-- al
i ,
(2.2)
Начальные и граничные условия перепишутся следующим образом:
u ( x ,0 ) = h ( x ),
q
q
v
(x,0) = 1 j jhfn)d„ dqXj jh1(n)dn d^ (2.3) aa
2 h 2
a = —-, p = — ah a
h
(2.6)
то систему (2.2) можно записать в векторной форме ym -1 -[ 2 e+« b ] ym+1 + ym+
= -( ym-1 -[ 2 E + aB ] ym + ym,+1 +P V), где E - единичная матрица. Положим C = 2E + aB, C = 2E -aB И Fm = y"m-1 - Cy"m + ym+1 +P V . Тогда наша система запишется следующим образом:
ym+-1 - cym+1 + ym+ =- f: .(2.8)
Заметим, что схема, которую будем решать методом матричной прогонки [24–27], является безусловно устойчивой [20]. Аппроксимируем управляющие функции w ( t ) , i = 1,..., p кусочно-постоянными функциями: V t e [ t ., t^ !) положим w ( t ) = w i , где w i - const, i = 1,..., p , j = 0,..., NT_ t. Тогда интеграл энергии балки будет являться функцией переменных wi .
L(T) = L(w0,...,wmT ) =
= j L u t ( w 0,..., w N , x , T ) + a 4 u 2 x ( w 0,..., w pT , x , T ) ] dx. (2.9) 0
Для численного нахождения интеграла энергии (2.9) будем использовать метод Симпсона [22].
3. Минимизация интеграла энергии колеблющейся балки
Оптимальные значения w 10,, wN p , минимизирующие (2.9) с заданной точностью 8 , и будут искомым решением задачи. Для решения задачи гашения колебаний будем использовать метод Марквардта [28, 29].
При больших размерах конечно-разностной сетки или при использовании достаточно большого числа ак-тьюаторов численное нахождение управляющих функций путем использования прямых методов минимизации второго порядка может быть вычислительно сложной задачей, требующей для своей реализации много времени [30, 31]. Однако возможно существенно сократить время расчета, найдя хорошее начальное приближение из минимизации некоторой эмпирической функции, зависящей от небольшого числа параметров.
Основная идея использования эмпирических функций состоит в замене исходной минимизируемой функции другой непрерывной функцией w ( t ) , , зависящей от небольшого числа параметров. Предположим, что каждая из управляющих функций имеет следующий вид:
w ( eP-’ e7’ t ) EMP = elsin ( e2 t + e3 ) + + e4 sin (e5t + e6) sin (e^), где постоянные значения e,,e еще не известны. Введем специальную функцию преобразования
1 p
EMP e lv , e 7
. (3.2)
= L ( w ( e , ,..., e 7 ,0 • h t ) EMp ,..., w ( e,..., e 7 , N T • h t ) emp )
Для нахождения эмпирических коэффициентов e 1, , e 1, , ep , , ep будем решать задачу нахождения минимума функции (3.2), используя метод минимизации Марквардта. Полученные управляющие функции используются в качестве начального приближения для минимизации (2.9) с заданной точностью ε.
4. Примеры расчетов
Пример 1. Начальные условия h 0 ( x ) = 0,1sin ( 2n x ) , h ( x ) = 0. Входные параметры a = 1, l = 1, время, требуемое для гашения, зададим T = 0,5, размеры конечно-разностной сетки N х K = 20 х 250, тогда Нх = 0,05, h = 0,002. Будем считать, что задача гашения колебаний решена, если L ( w ( t ) ) < 8 , где 8 = 10 - 4.
Актьюатор, установленный в точку х 0 = 0,5, не может погасить колебания балки, поскольку точка х0 = 0,5 является узлом стоячих волн. Это видно на рис. 1.
Для наглядности во всех примерах будем указывать погрешность вычисления интеграла энергии в экспоненциальном виде в правом верхнем углу.
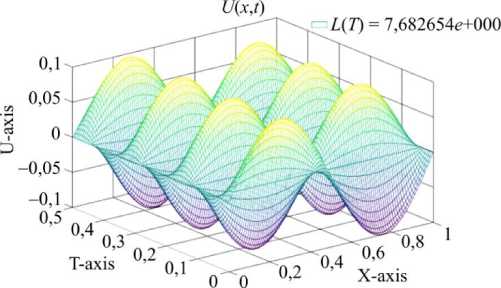
Рис. 1. Процесс гашения колебаний с помощью актьюатора в точке x 0 = 0,5 (гашение не происходит)
Fig. 1. Damping of oscillations of a beam by using single point actuator in x 0 = 0.5 (damping is not possible)
Рассмотрим те же условия примера, но для гашения колебаний используем два стационарных актьюа-тора, стоящих в точках x = 0,25, x2 = 0,75 соответственно. Условие решения задачи перепишем в виде L ( w ( t ) , w 2 ( t ) ) < 8 = 10 - 4. Размер и шаги конечно -разностной сетки оставим прежними.
Решим задачу для двух случаев: с использованием прямой минимизации функции (2.9) с начальным управлением вида w ( t ) = 0, w 2 ( t ) = 0 и с использованием эмпирических функций (3.2) для получения начального приближения. В первом случае задача была решена с погрешностью L ( w ( t ) , w 2 ( t ) ) = 5,070Ь10 - 13.
Во втором случае, используя метод минимизации Марквардта, найдем следующие эмпирические коэффициенты e :
6 1000 - 0,1196 0,0317 1000 - 6,6844 2,9977 - 6,5086 e =
( 1000 - 2,7326 3,2003 1000 - 2,5081 - 3,1785 9,9958
Подставив их в (3.2), получим управляющие функции w ( t ) , w 2 ( t ) , позволяющие решить систему (2.1) с погрешностью LEMP ( e\,...,e 2 ) = 0,32495. Далее возьмем их в качестве начального приближения и повторно используем метод Марквардта для окончательного нахождения управляющих функций w ( t ) , w 2 ( t ) . В итоге мы минимизировали значение интеграла энергии балки (2.9) с погрешностью L ( w ( t ) , w 2 ( t ) ) = = 4,8804 •Ю - 13.
Графики значений функции u (x, t) , иллюстрирующей процесс гашения колебаний балки, и итоговый вид управляющих функций w (t) и w2 (t) для обоих случаев изображены на рис. 2. и рис. 4 соответственно. На рис. 3 ото- бражено, как ведет себя балка в точках приложения актьюа-торов в процессе гашения колебаний в обоих случаях.
Тем самым задача решена за установленное время
T = 0,5. Наглядно видно, что, несмотря на одинако- вые начальные условия и параметры сетки, вид управляющих функций различается в зависимости от начального приближения и процесс гашения протекает по-разному.
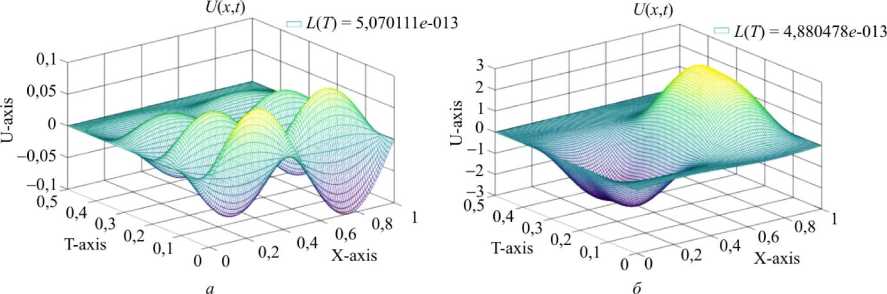
Рис. 2. Процесс гашения колебаний с помощью двух актьюаторов в точках х 1 = 0,25, x 2 = 0,75 ( а ) при начальных значениях w 1,..., w 2 Nt = 0; ( б ) с эмпирическим приближением (3.2)
Fig. 2. Damping of oscillations of a beam by using two point actuators placed in x 1 = 0.25, x2 = 0.75
by control functions obtained ( a ) with initial minimization values w 1,..., w 2 Nt = 0; ( b ) via empirical approach (3.2)
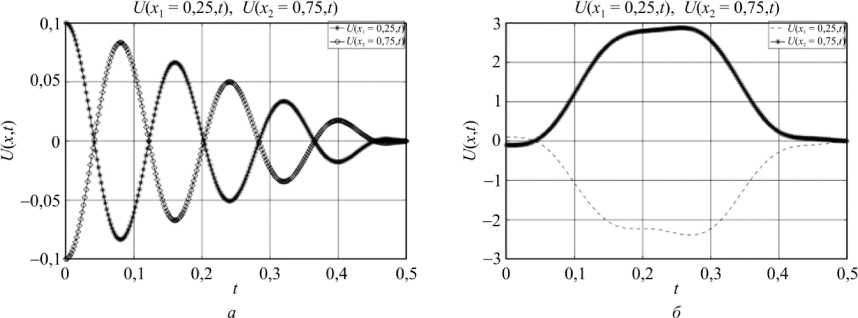
Рис. 3. Процесс гашения колебаний в точках приложения актьюаторов х 1 = 0,25, x 2 = 0,75 ( а ) с начальными значениями w 1,..., w 2r = 0; ( б ) с эмпирическим приближением (3.2) Fig. 3. Damping of oscillations of a beam at actuator points x 1 = 0.25, x 2 = 0.75 ( a ) with initial minimization values w 1,..., w 2 Nt = 0; (b) with empirical approach (3.2)
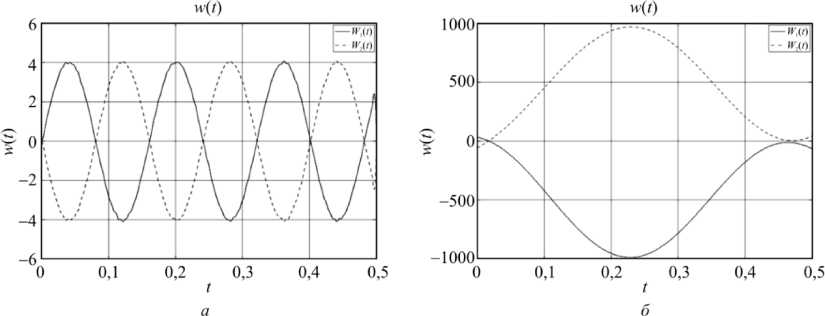
Рис. 4. Управляющие функции wx ( t ) и w 2( t ) , полученные с начальными значениями w 1,..., w2Nt ( а ); с эмпирическим приближением (3.2) ( б )
Fig. 4. Control functions wx ( t ) and w 2( t ) obtained ( a ) with initial minimization values w 1,..., w 2r,
( b ) via empirical approach (3.2)
Пример 2. Начальные условия h^ ( x ) = 0,1sin ( 2nx ) , h ( x ) = 0. Входные параметры a = 1, l = 1, размеры конечно-разностной сетки N x K = 20 x 50, тогда h = 0,05, h = 0,002. Для гашения колебаний используем 4 акть-юатора, стоящие в точках x = 0,2, х2 = 0,4, х3 = 0,6, х 4 = 0,8 соответственно. Условием гашения колебаний, как и прежде, будем полагать L ( " 1 ( t ) , w 2 ( t ) , w 3 ( t ) , W 4 ( t ) ) ^ £ , где 8 = 10 - 4. Зададим время гашения равным T = 0,1. По умолчанию начальное приближение для всех управляющих функций будем принимать нулевым.
На рис. 5 изображены процесс гашения колебаний u ( x , t ) и управляющие функции w ( t ) , i = 1,... ,4 соответственно.
Рассмотрим те же условия примера, но положим T = 0,01. На рис. 6 изображены процесс гашения и управляющие функции соответственно.
На рис. 4, а и рис. 5, а можно хорошо видеть различия в процессе гашения колебаний в зависимости от заданного времени гашения T . Так, при достаточно большом времени процесс гашения протекает более плавно. И наоборот, при маленьком времени на балке возникает множество микроколебаний, которые затем сглаживаются управляющими функциями. Амплитуда колебаний любых управляющих функций возрастает вместе с уменьшением заданного времени гашения. На рис. 7 изображена зависимость максимальной амплитуды каждой из управляющих функций от времени Т .
Таким образом, можно заметить, что амплитуда управляющих функций растет почти экспоненциально при приближении Т к нулю.
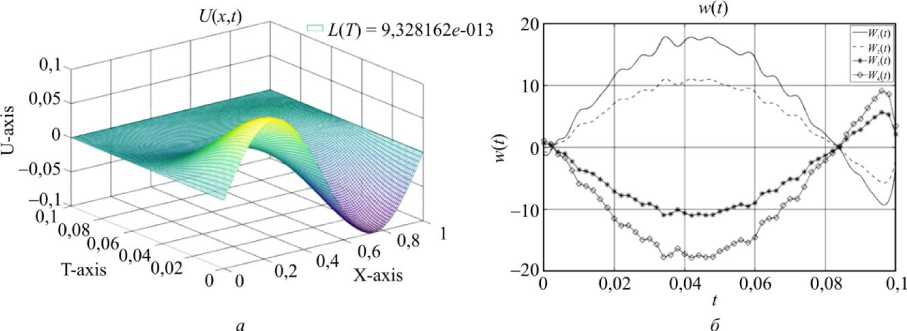
Рис. 5. Процесс гашения колебаний с помощью четырех актьюаторов в точках х 1 = 0,2, х 2 = 0,4, х 3 = 0,6, х 4 = 0,8 за время T = 0,1 ( а ); управляющие функции w ( t ) , w 2 ( t ) , w 3 ( t ) и w4 ( t ) ( б )
Fig. 5. Damping of oscillations of a beam by using four point actuators placed in x 1 = 0.2, x 2 = 0.4, x 3 = 0.6, x 4 = 0.8 within time T = 0.1 ( a ); control functions w ( t ) , w ( t ) , w 3 ( t ) and w 4 ( t ) ( b )
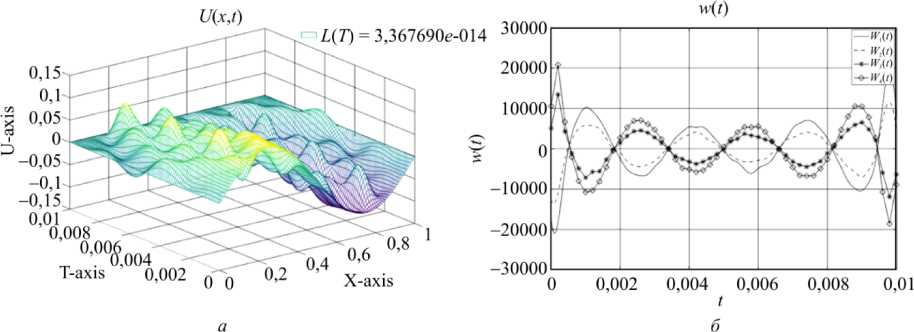
Рис. 6. Процесс гашения колебаний с помощью четырех актьюаторов в точках х 1 = 0,2, х 2 = 0,4, х 3 = 0,6, х 4 = 0,8 за время T = 0,01 ( а ); управляющие функции w 1 ( t ) , w 2 ( t ) , w3 ( t ) и w 4 ( t ) ( б )
Fig. 6. Damping of oscillations of a beam by using four point actuators placed in x 1 = 0.2, x 2 = 0.4, x 3 = 0.6, x 4 = 0.8 within time T = 0.01 ( a ); control functions w ( t ) , w 2 ( t ) , w 3 ( t ) and w 4 ( t ) ( b )
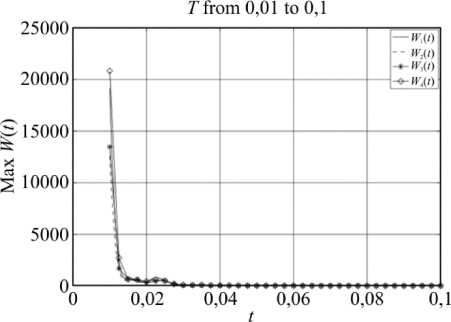
Рис. 7. Зависимость максимальной амплитуды управляющих функций от T e [0,01;0,1]
Fig. 7. Dependence of the maximum amplitude of control functions on time T e [0.01; 0.1]
Пример 3. Рассмотрим случай, когда на управляющие функции накладываются ограничения. Данный случай является более приближенным к практической реализации, так как при проектировании механизмов актьюаторов необходимо закладывать предельно допустимую мощность приводов. Для нахождения ограниченных управляющих функций необходимо использовать методы нахождения условного минимума. В этой работе используется метод внешних штрафов с использованием метода Марквардта для решения соответствующей задачи нахождения безусловного минимума.
Так как при приближении времени гашения к нулю максимальная амплитуда каждой из управляющих функций начинает возрастать, необходимо подбирать такое время гашения, при котором L(w1 (t),...,wp (t))<£ и w (t)e[a;b]. Назовем минимальное время Т, при котором выполняются оба условия оптимальным временем гашения. Время гашения можно уменьшить либо при помощи расширения допустимых границ управляющей функции, либо увеличением числа актьюаторов.
Пусть
h0
(
x
)
= 0,2
x
(
1 -
x
)
,
h
(
x
)
= 0 . Входные параметры
a
=
1,
l
=
1, размер сетки
N
x
K
=
40
x
120. Будем считать, что задача гашения колебаний решена, если
L
(
w
(
t
),...,
wp
(
t
)
)
Покажем, что за счет увеличения числа актьюаторов при неизменных ограничениях возможно уменьшить минимальное время гашения. Первоначально будем решать задачу с использованием одиночного стационарного актьюатора, помещенного в x = 0,5. На управляющую функцию наложим ограничение w ( t ) е [ -2;2 ] . Минимальное время, требуемое для гашения, T = 0,2265.
Вид управляющей функции w ( t ) изображен на рис. 8, а .
Теперь решим эту же задачу с использованием двух актьюаторов, помещенных в xx = 0,25 и x 2 = 0,75 соответственно. Ограничения, налагаемые на управляющие функции, оставим прежними. В этом случае удается сократить минимальное время, требуемое для гашения, до T = 0,1825.
Управляющие функции wx ( t ) , w 2 ( t ) изображены на рис. 8, б .
И, наконец, решим задачу с использованием 4 актьюа-торов в точках x = 0,25, x2 = 0,4, x3 = 0,6, x4 = 0,75. Наложим прежние ограничения на все управляющие функции. В этом случае минимальное время удалось сократить до T = 0,1237.
На рис. 9 изображены процесс гашения колебаний и управляющие функции соответственно.
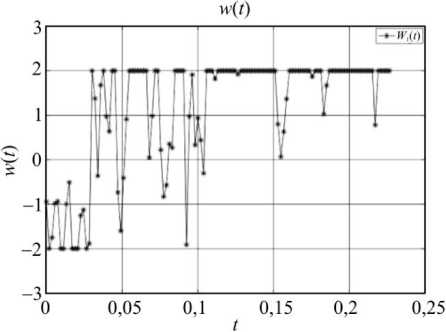
Рис. 8. Управляющие функции w ( t ) с ограничениями w ( t ) e [ - 2;2 ] , i = 1,..., p для ( а ); p = 1, T = 0,2265, для (б) p = 2, T = 0,1825
Fig. 8. Control functions w ( t ) with constraints wt ( t ) e [ - 2;2 ] , i = 1,..., p for ( a ); p = 1, T = 0.2265 , ( b ) p = 2, T = 0.1825
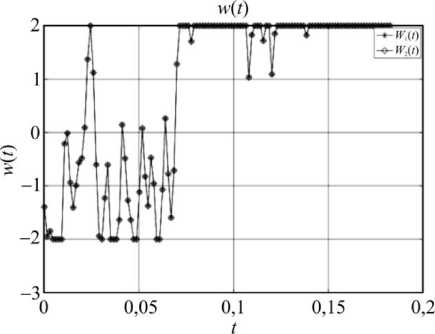
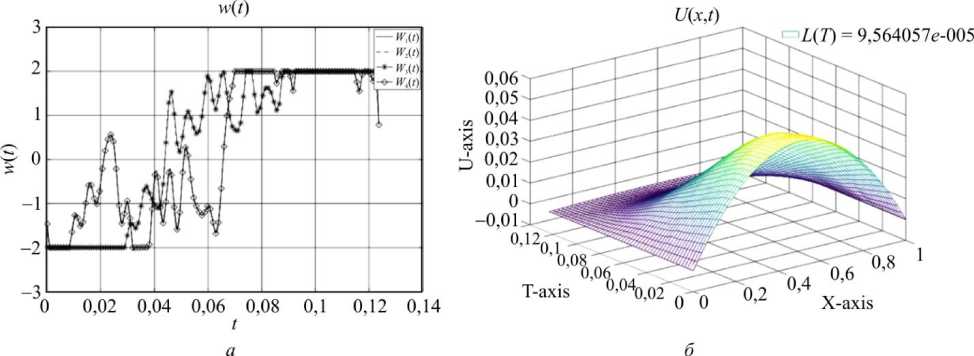
Рис. 9. Управляющие функции wx (t), w (t), w (t) и w4 (t) с ограничениями w(t) w2 (t) W3 (t) w4 (t )e[-2;2] для T = 0,1237 (а); процесс гашения колебаний с помощью четырех актьюаторов в точках x1 = 0,25, x2 = 0,4, x3 = 0,6, x4 = 0,75 за время T = 0,1237 с ограничениями w (t) w (t) w (t)w4 (t)e[-2;2] (б)
Fig. 9. Control functions w ( t ) , w ( t ) , w ( t ) and w 4 ( t ) with constraints w ( t ) w ( t ) w 3 ( t ) w 4 ( t ) e [- 2;2 ]
for T = 0.1237 (a); damping of oscillations of a beam by using four point actuators placed in x = 0.25,x2 = 0.4,x3 = 0.6,x4 = 0.75 within time T = 0.1237 with constraints w (t)w (t)w (t)w (t)e[-2;2] (b)
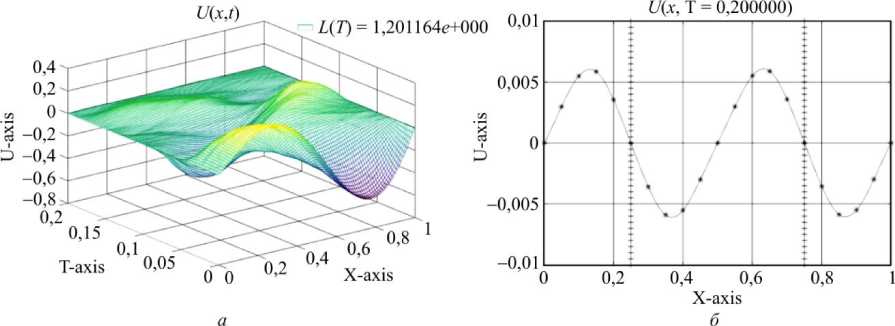
Рис. 10. Процесс гашения колебаний с помощью двух актьюаторов в точках х 1 = 0,25, x 2 = 0,75 (частичное гашение) ( а ); срез значений функции u ( х , t ) , t = T = 0,2 (окончательного гашения не происходит) ( б )
Fig. 10. Damping of oscillations of a beam by using two point actuators placed in xx = 0.25, x 2 = 0.75 (partial damping) ( a ), function u ( x , t ) values cut at T = 0.2 (new nodes of standing waves appear at all points of the actuators, further damping is not possible) ( b )
Пример 4. Для гашения колебаний в случае некоторых начальных возмущений необходимо использование на разных промежутках времени разных групп актьюато-ров. Начальные условия h^ ( x ) = 0,25exp ( x ) sin ( 2n x ) , h ( x ) = 0. Входные параметры a = 1, l = 1, время, требуемое для гашения, зададим T = 0,2, размеры конечно-разностной сетки N х K = 20 х 250, тогда h = 0,05, ht = 0,0008. Будем считать, что задача гашения колебаний решена, если L ( w ( t ),..., w ( t ) ) < s , где 8 = 10 - 4.
На временном срезе T = 0,2 (рис. 10, б ) заметно, что два актьюатора, установленные в точках xx = 0,25 и x2 = 0,75, не могут погасить начальное возмущение (рис. 10, а ).
Для гашения колебаний разделим задачу на два временных промежутка. Будем использовать 4 актьюатора, установленные в точках xx = 0,15, x2 = 0,25, x3 = 0,65, x4 = 0,75, однако на первом промежутке T е[0;0,1] будем использовать лишь два из них в точках x и x . Другие два актьюатора в точках x и x на этом промежутке оставим неактивными.
Минимизируя функцию (3.2), получим эмпирические коэффициенты e :
-
< 1000 - 3,2196 3,0779 1000 - 5,9374 - 0,0239 7,5418 )
e =
-
( 1000 30,536 3,0844 1000 25,405 0,1781 29,208 J
Далее, получив w ( t ) EMP , w 4 ( t ) EMP и используя их в качестве начального приближения для w 2 ( t ) , w 4 ( t ) , решим задачу с погрешностью L ( w 2 ( t ) , w 4 ( t ) ) = 1,1797 . На рис. 11 изображен процесс частичного гашения колебаний на временном промежутке T е [ 0;0,1 ] и временной срез на T = 0,1.
На втором временном промежутке T е [ 0,1;0,2 ] для гашения колебаний используем оставшиеся два актьюатора в точках х, = 0,15, х3 = 0,65. Предыдущие два актьюатора в точках x и x оставим неактивными. Будем использовать решение предыдущей подзадачи в качестве нового начального возмущения. Для начальной скорости в этом случае положим
v(l, t) предыдущей подзадачи как v(0,t) второй подзадачи.
Минимизируя (3.2), получим e :
-
< 1000 2,8741 3,1415 1000 10,572 0,9895 3,0815 )
e =
-
( 1000 6,8311 3,1421 1000 13,532 - 2,3983 - 7,1904 J
Используя w ( t ) EMP , w 3 ( t ) EMP как начальное приближение для w ( t ) и w 3 ( t ) , получим погрешность L ( w ( t ) , w 3 ( t ) ) = 2,2163 - 10 - 13 для второй подзадачи. На рис. 12 изображены процесс гашения колебаний на временном промежутке T е [ 0,1; 0,2 ] (используется шкала для функции u ( х , t ) , в 20 раз меньшая, чем на рис. 11) и временной срез на T = 0,2.
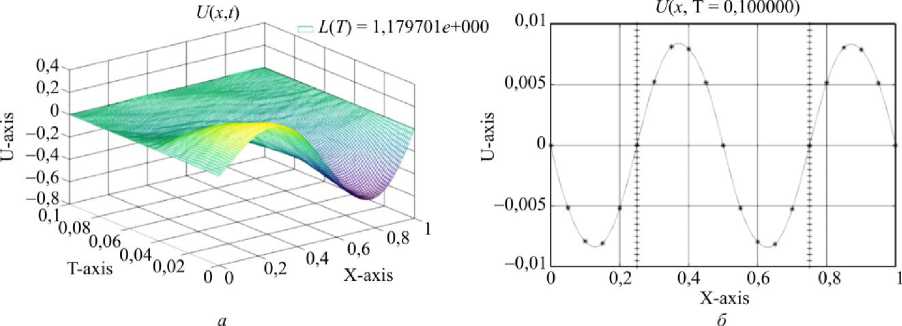
Рис. 11. Процесс гашения колебаний с помощью двух актьюаторов в точках х 2 = 0,25, х 4 = 0,75 на промежутке T е [ 0;0,1 ] (частичное гашение) ( а ); срез значений функции u ( х , t ) , t = T = 0,1 (окончательного гашения не происходит) ( б )
Fig. 11. Damping of oscillations of a beam by using two point actuators placed in x 2 = 0.25, x 4 = 0.75 on T е [ 0;0.1 ] (partial damping) ( a ), function u ( x , t ) values cut at T = 0.1 (new nodes of standing waves appear at all points of the actuators, further damping is not possible) ( b )
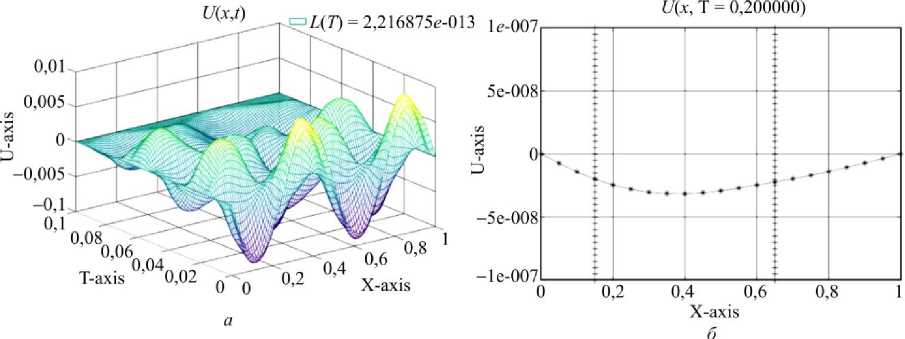
Рис. 12. Процесс гашения колебаний с помощью двух актьюаторов в точках х , = 0,15, х 3 = 0,65, на промежутке T е [ 0,1;0,2 ] ( а ); срез значений функции u ( х , t ) , t = T = 0,2 ( б )
Fig. 12. Damping of oscillations of a beam by using two point actuators placed in х 1 = 0.15, х 3 = 0.65 on T е [ 0.1;0.2 ] ( a ); function u ( х , t ) values cut at T = 0.2 ( b )
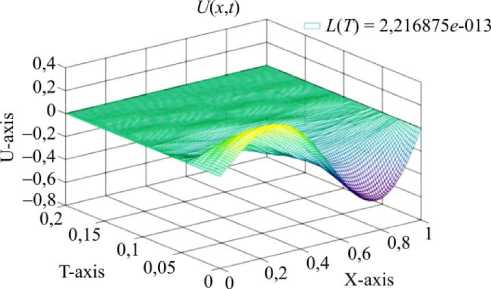
Рис. 13. Полный процесс гашения колебаний с помощью четырех актюаторов: х = 0,15, х 2 = 0,25, х 3 = 0,65, x 4 = 0,75 Fig. 13. Complete damping of oscillations of a beam by using four point actuators placed in xx = 0.15, x 2 = 0.25, x 3 = 0.65, x 4 = 0.75
Таким образом, задача решена за время T = 0,2 при помощи двух актьюаторов х2 = 0,25 и х4 = 0,75 на T е [ 0;0,1 ] и двух актьюаторов хх = 0,15 и х3 = 0,65
на T е [ 0,1;0,2 ] с итоговой погрешностью
L ( w 1 ( t ),..., w p ( t ) ) = 2,2163 - 10 - 13. Объединив ux ( x , t ) , и u 2 ( x , t ) в u ( x , t ) проиллюстрируем на рис. 13 полный процесс гашения колебаний в этой задаче.
Таким образом, разработан численный метод гашения колебаний балки с помощью нескольких неподвижных точечных актьюаторов. Он позволяет провести исследования процесса гашения колебаний при различном времени T .
Работа выполнена при поддержке гранта РНФ № 17-19-01247.
Acknowledgements
The work is supported by the grant of the Russian Science Foundation Nr. 17-19-01247.
Список литературы Гашение вынужденных поперечных колебаний упругой балки с помощью нескольких стационарных актьюаторов
- Лурье А.И. Теория упругости. - М.: Наука, 1970. - 940 с.
- Тимошенко Н.В. Курс теории упругости. - Киев: Наук. думка, 1972. - 508 с.
- Лионс Ж.Л. Оптимальное управление системами, описываемыми уравнениями с частными производными. - М.: Мир, 1972. - 414 с.
- Lagness J. Control of wave process with distributed controls supported on a subregion // SIAM Journ. Control and Optim. - 1983. - Vol. 1. - Nо. 1. - P. 68-85.
- Russel D. Controllability and stabilization theory for linear partial differential equations // SIAM Review. - 1978. - Vol. 20. - Nо. 5. - P. 639-739.
