Геометрическая квазидискретная модель группового преследования одиночной цели

Автор: Дубанов Александр Анатольевич, Аюшеев Тумэн Владимирович, Севээн Ай-Кыс Эрес-Ооловна
Рубрика: Инженерная геометрия и компьютерная графика
Статья в выпуске: 4 т.20, 2020 года.
Бесплатный доступ
В статье представлена геометрическая модель процесса преследования одиночной цели группой преследователей. Квазидискретная модель группового преследования цели основана на том, что каждый из преследователей в расчетное время, соответствующее его шагу, проектирует прогнозируемую траекторию движения, согласно его цели и стратегии. Движение происходит на плоскости, но при необходимости данную модель можно перенести на поверхность, заданную в явном виде. Скорости движения всех участников, как преследователей, так и цели, постоянны по модулю. Цели и стратегии каждого из преследователей, несмотря на различие траекторий, объединяет один критерий: они стремятся подойти к точке пространства, связанной с преследуемым объектом, под заданным направлением, соблюдая ограничения по кривизне траектории. Цель и стратегия объекта преследования определяется поведением того преследователя, который, достигнув определенного расстояния до цели, переходит на движение с ее скоростью («стратегия погони»). Два других преследователя нацелены на точки, движущиеся курсом, параллельным курсу цели. Достигнув целевых точек, преследователи переходят на курс, параллельный курсу цели, со скоростью, равной скорости движения цели. Еще один преследователь в качестве цели имеет точку, расположенную впереди цели. Этот преследователь стремится подойти к данной точке под прямым углом к траектории цели.
Преследование, уклонение, убегание, моделирование, алгоритм, цель, преследователь, траектория
Короткий адрес: https://sciup.org/147233731
IDR: 147233731 | УДК: 004.021 | DOI: 10.14529/build200408
Geometric quasi-discrete model of group pursuit of a single target
This article describes a geometric model of the process of pursuing a single target by a group of pursuers. The quasi-discrete model of group pursuit of a target is based on the fact that the pursuers, at the estimated time corresponding to their steps, design the predicted trajectory of movement, according to their targets and strategy. The movement occurs on a plane, but if necessary, this model can be transferred to the explicitly defined surface. The speed of movement of all participants, both pursuers and targets, is constant in magnitude. The targets and strategies of the pursuers, despite the difference in trajectories, are united by one criterion: they strive to approach the point in space associated with the pursued object, under a given direction, observing the restrictions on the curvature of the trajectory. The target and strategy of the object of pursuit is determined by the behavior of the pursuer who, having reached a certain distance to the target, switches to moving with the speed of the latter (“pursuit strategy”). The other two pursuers are aimed at points moving parallel to the target's course. Having reached the target points, the pursuers move to a course parallel to the target's course, at a speed equal to the target's movement speed. Another pursuer has a point located in front of the target as a target. These pursuers seek to approach a given point at a right angle to the target's trajectory.
Текст научной статьи Геометрическая квазидискретная модель группового преследования одиночной цели
В рассматриваемой задаче вводится период дискретизации времени, когда преследователь делает шаг и меняет направление движения. Используя квазидискретную модель в задаче преследования, можно аппроксимировать динамический процесс преследования с последующей визуализацией этого процесса.
В статье обсуждаются вопросы следования преследователем, в которых траектории цели и преследователя предварительно смоделированы. Предполагается, что траектория, отвечающая заданным требованиям, автоматически моделируется в каждый момент времени. Рассматривается группа из четырех преследователей.
1. Моделирование траектории преследователя
Преследователь начинает движение из точки Р со значением скорости VP и настигает цель в точке Т, причем траектория преследователя должна быть сконструирована таким образом, чтобы попадать в точку Т по направлению вектора V P . Траектория движения состоит из прямолинейного отрезка, соединяющего точки Р и Ptan , и из дуги ТГ^т радиуса Rp (рис. 1, а).
На второй участок моделируемой траектории накладываются граничные условия: радиус кривизны не должен быть меньше Rp , а угол подхода к цели определяется вектором скорости V P . В тес-
товой программе этот вектор перпендикулярен вектору скорости цели VT . Центр дуги ТТР От , отвечающей заданным условиям, определяется вы-
ражением:
С т = Т + RpJ—^L\
V Лт1/
Для определения точки Ptan сопряжения прямой (Р, Ptan ) с дугой Т, Ptan реализована процедура – функция, формирующая локальную систему
координат с ортами е1 и
Ст-P „ Г-е1 у"!
ез = ------, е2 = „ . Точка Ст в этой системе
1 |Ст-Р|' 2 L е1х J координат преобразуется к виду:
Г(Ст - Р) -еа_
. Отсюда находим координаты точ-L (С т — Р) • cj
Г Г — [ 1(СТ — Р)11 ки сТ.п : сТ.п = [ QJ
Если модуль вектора |(CT —Р)| равен Сх (рис. 1, б), то в локальной системе координат
(е 1 , е2) координаты точки сопряжения Ptan . п удовлетворяют системе уравнений в локальной системе координат (е 1 , е2) с центром в точке Р:
(Ptan .п СТ.п ) • (P tan .п СТ.п ) RP ,
(P tan .п
—
CT.n ) • Ptan .п °"
В системе координат (е 1 , е2) с центром в точке Р эта система уравнений имеет решение:
Г C x 2 —R p ’
1 tan .п
±
С х
RP^(C
x
+R
p
)
С х
.
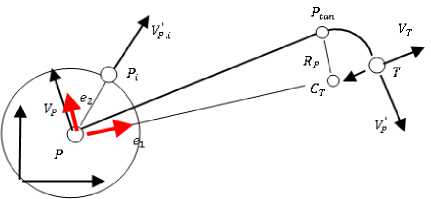
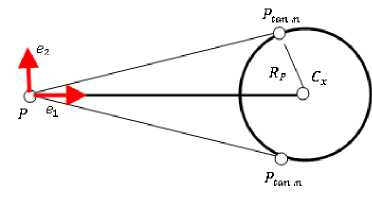
Рис. 1, б. Определение точки сопряжения в локальной системе координат
Рис. 1, а. Предполагаемая траектория следования преследователя
Для преобразования координат точки Ptan . n в мировую систему координат (Н2, Н 2 ), где Н2 = [1] , Н 2 = [0], необходимо получить выражения для базиса (Н 2, Н 2 ) относительно базиса (б2, 6 2 ):
Н1 '62 Н • 61
^ = к • 62J, " = [н2 •62J. В частности,коор-
vp где V 2 = IT P ! точки P tan
р.
tan .v
[ (Ptan (Ptan
V 2 = [ vi"y( (рис. 2, а). Координаты в этой системе координат равны
—
—
P) • ” 2
P) • ” 2
], а координаты точки PiV
равны:
динаты точки Ptan . n в мировой системе координат равны: Ptan = [Qtan .n ^21 + P. В программе реа- Ptan .n • ^ 2
лизован вариант, когда точка Ptan . n находится в
P i.v
|ИР|^ДТ • cos(Шp•ДТ)l if Ptanvy - 0 [|yP| • ДТ • sin(^P • ДТ)]
|УР|^ДТ^ cos(Шp•ДТ) . if Ptanvy < 0 [—|yP| • дт • sm(Wp • ДТ)]
верхнем положении.
В рамках квазидискретной модели задачи преследования введем в рассмотрение период дискретизации ДТ. При этом шаг преследователя имеет величину |Vp| • ДТ. Если минимальный радиус кривизны равен Rp, то угловая частота вращения точки P равна toP = —. Угол подхода к цели дис-rp кретно изменяется с шагом toP • ДТ.
Если угол к меньше, чем угол toP • ДТ, то координаты точки PiV определяются выражением
if Ptan .Vy
|VP| 'ДТ' cos(«)l - 0 L|Vp| 'ДТ' sin(«)]
|Vp|•ДТ• cos(«) .
< 0 L—|Vp| 'ДТ' sin(«)]
Угол к - это угол
между вектором P tan.v
вектором ”2 . Переводя координаты точки PiV
и из
2. Определение координат точки касания в системе координат преследователя
В рассматриваемой квазидискретной модели преследователь должен догнать цель таким образом, чтобы в момент совпадения координат (преследователя и преследуемого объекта) преследователь имел заданный вектор скорости и круговую траекторию с радиусом кривизны, не превышающим допустимой величины. Рассмотрим систему координат (v2,v2 ) с началом в точке P .
системы координат (v2,v2 ) в мировую систему координат, получаем выражения для базиса (Н 1 ,Н 2 ) в базисе (v2, v2 ):
^ e = 1Н1 '”2 ]
2 Н • ”21
h2V [h2 ■ i>2]'
где Н 2 = Щ. Н 2 = Q.
На следующем этапе итераций положение преследователя Pi определяется выражением:
P-=[
'Pi.v • ^2.
-Piv • ^2.
.V
. .V
I + P, то есть траектория преследо-
вателя Pi приближается к прямой линии (P, Ptan ).
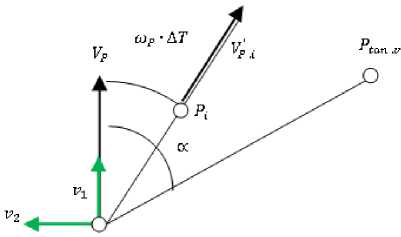
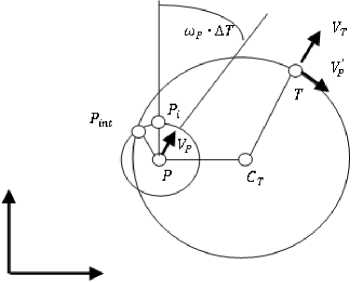
Рис. 2, б. Анализ координат точек пересечения окружностей
Рис. 2, а. Выбор направления движения преследователя
3. Координаты точек пересечения круговых траекторий
Рассмотрим случай, когда между преследователем Р и центром окружности Ст расстояние меньше минимального радиуса кривизны траектории RP преследователя. На рис. 2, б представлены две пересекающиеся окружности с радиусами rP и RP . Точки Р и Ст - центры точек, где rP = шР • ДТ. Требуется определить координаты точки Pi как функции координат точек Pint пересечения двух окружностей в системе координат (б1, 6 2 ) с центром в точке Р, где
|Ур1^ДТ • cos(Шp•ДT)l
lJ Рш,ру - 0 [|УР| • дт • sin(Wp • ДТ)] i,p = |vp| •дт^ cos(Шp•ДT) .
lJ Рш,ру < 0 [—|Kp| • дт • sin(^Р • ДТ)]
Если угол к меньше, чем угол toP • ДТ, то координаты точки Pi р равны:
^•дт^ cos(K)l
lJ PjntрУ- °[|КР|-ДТ- sin(K)|
1" "ifP <0 [ ^^ cos(K) .
IJ Pjnt, py
Угол к - угол между вектором Pint , р и векто
Ст —Р е1 “ |Ст—Р| ’
«2- [—3
ром р1.
Преобразуя координаты Pi , р из системы координат (р1,р2) в мировую систему координат, получаем выражения для базиса (Н1,Н2) в базисе (Р 1 ,Р 2 ):
В системе координат (б1, 62) выражения для координат точки Pint ,n имеют вид:
|
р. . = int ,n |
С Х —R p +r p2 ■ 2^С х |
|
, ^(С Х +R P |
-r p )• ( С x —R p +r p )• ( R p —С x +r p )^ ( R p +С х +r p ) |
|
± |
|
|
2^С х |
^ [
' Н1 • р1 . Н • Р2
] ^,р [Н • ^2],
где H i = [0], Н 2 = [1].
Отсюда находим выражения для координат преследователя Pi на следующем этапе итераций:
В предлагаемом алгоритме основное внимание уделено верхней точке (см. рис. 2, б). Переведем координаты Pint , n в мировую систему координат: Pint = [pint ,n ,1 ] + Р, где векторы h1 и И.2
P int .п • Л 2
P i
■ Рр • ^.pl
-Pi,р • ^ 2,pJ
+ Р.
Таким образом, рассмотрен алгоритм перехода преследователя на дугу РЗ-Т (см. рис. 2, б).
определяются выражениями
'■' = [Н 1 •Й ’ А 2
где Н , = [Ц, Н 2 = [1].
Н • 611
.Н 2 • е 2 ]
Для определения координат точек пересече-
ния окружностей перейдем в систему координат (р1,р2 ) с началом в точке Р:
Р 1 = Si Р 2 = [v2У](рис.3,а).
В системе координат (р1, р2) координаты точки Pint определяются выражением:
(Pint — Р) • Pi] [(Pint— Р)^2 Г
Координаты Р1р в системе координат (р1,р2) с началом в точке Р имеют вид:
4. Случай непересекающихся окружностей
Рассмотрим случай |Р — СР| < RP — гр .В этой ситуации следует поставить точку Pint на оси (Р,СР) слева от точки Р (см. рис. 3, б). В системе координат (е1, е2) с центром в точке Ст эта точка имеет координаты Pint , n = [ ^Р]. Требуется рассчитать угол « между вектором УР и вектором РЖ.
Если угол « меньше, чем угол шР • ДТ, то координаты точки P j , р на следующем шаге итераций в системе координат (р1,р2) с началом в точке Р
определяются выражением
|VP| • ДТ • cos(K)l i,p [|^р|^ДТ- sin(«)].
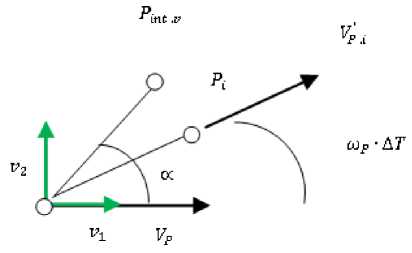
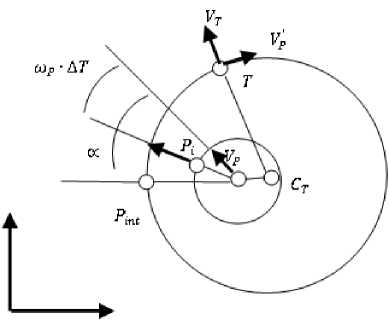
Рис. 3, б. Случай непересекающихся окружностей
Рис. 3, а. Анализ в системе координат преследователя
Если при этом точка Т в системе координат (е 1 , е2) с центром в точке СТ находится в верхней полуплоскости, то
|^Р| 'ДТ' cos(k)1
Lr L|Vpj•ДТ• sin(K)], а если в нижней полуплоскости, то
ния ш 1 , ограничим радиус кривизны траектории j^ i j движения преследователя величиной R1 = —.
Для реализации стратегии преследователя Р 1
Р .г
—
Г|УР1 'ДТ' cos(k) [|р| 'ДТ' sln(K)|.
надо выполнить теме координат точке Р 1 , где
расчет координат точки Т в сис-(" 1 , г2) с началом координат в
Если же угол к больше, чем угол шР • ДТ, то координаты точки Р " г определяются выражением
|Vpj• ДТ • cos(шp•ДТ)
"." L|VP|•ДТ• sin(wP•ДТ)].
При этом также реализуются две возможности: если точка Т находится в верхней полуплоскости, то
|Vp| • ДТ' cos(wp 'ДТ)!
"." L|VP|•ДТ• sin(wP•ДТ)], а если в нижней полуплоскости, то
Vp Г1= ^ " 2 =гг]. Получаем координаты точки T v :
т = [ '"
(Т — Р) • "i (Т — Р) • "2].
Рл, =
—
Г| V | • ДТ • cos(toP • ДТ)1 Ljvpi • ДТ • sin(wP •ДТ)].
Рассмотренная ситуация встречается, когда скорость преследователя намного превышает скорость цели или очень мала угловая скорость преследователя.
5. Цель и стратегия первого преследователя
Пусть преследователь P 1, движущийся со скоростью V 1, догоняет объект T . «Догнать объект» – означает совместить координаты точек Р 1 и Т с точностью |Р 1 — Т| < е, где е = |V 1 | • ДТ (ДТ - период дискретизации). Полагая, что объект Р 1 имеет максимальную угловую скорость враще-
Исследуя положение точки Тг, определяем ее принадлежность верхней или нижней полуплоскости в системе координат (г 1 ,г2) с началом координат в точке Р 1 (рис. 4, а):
|V1|•ДТ• cos(^i • ДТ)1
= "7'", - 0 [|р|'ДТ' sin(^i 'ДТ)]
1" |И11'ДТ' cos(^i 'ДТ) .
I/ '", < 0 [_j711 • ДТ • sin(^1 • ДТ)]
В процессе расчета сравниваем значения углов ш 1 • ДТ и к, где к - угол между векторами РгТ и V i - Если угол к меньше угла шР • ДТ, то координаты точки Р1г равны:
Р г
ifT >ol^р^'c°s:
У '", - 0 [|уР|.ДТ-sln(«)]
IfT <0[ |Г Р |'ДТ' С0=(е) .
У Л’ <0 1-|ГР| • ДТ • sln(«)]
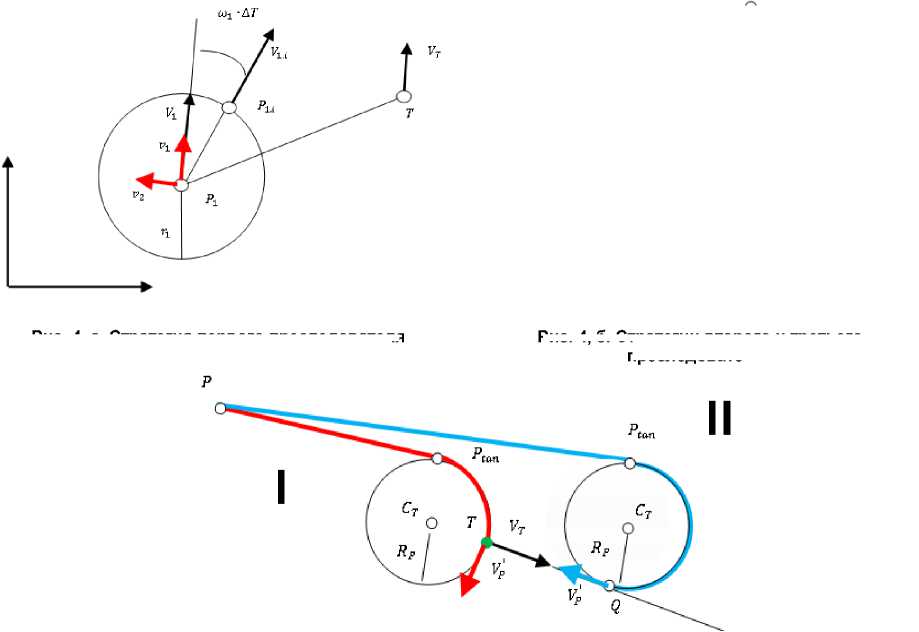
Рис. 4, в. Стратегия преследователя из «засады»
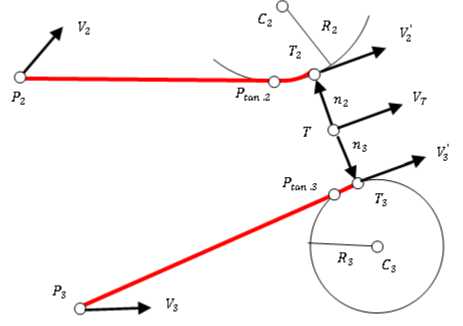
Рис. 4, а. Стратегия первого преследователя
Рис. 4, б. Стратегии второго и третьего преследователей
-
6. Цели и стратегии
второго и третьего преследователей
Преследователи Р2 и Р3 движутся со скоростями V 2 и V3. Их целью является совмещение (с определенной степенью точности г) точек Т2 и Т3 (рис. 4, б). Координаты точек Т2 и Т3 формируются в виде:
Т 2,3 = Т + ^ 2,3 .
Введем в рассмотрение векторы нормалей
п2 3 = ±-1- Vryl • Д52 з,
2,3 IV7-1 VT 2, где Д52,3 - расстояния от точек Т2 и Т3 до точки Т.
Объекты P2 и P3 должны подходить к точкам Т2 , Т3 со скоростями V2', V3 ’ . Радиусы кривизны траекторий этих объектов не должны быть меньше Д2 3 = '" 2,3 ' , где ш2 3 - максимальные угловые ско-, ш 1,2 '
рости вращения преследователей Р2 и Р3.
Напомним, что в каждый момент времени моделируемая траектория состоит из прямолинейного участка VP 23 ,P tan23 \ и сегмента дуги
Pt an: 2 , 3,Т2 , 3 . На каждом шаге итераций объекты Р2 и Р3 выполняют поворот на угол Дю и поступательно перемещаются на определенное расстояние. В предлагаемом алгоритме объекты Р2 и Р3 начинают движение со скоростью VТ , как только выходят на курс, параллельный курсу преследуемого объекта Т.
-
7. Цель и стратегия
-
8. Цель и стратегия объекта преследования
четвертого преследователя
Если условно классифицировать первого участника как главного «загонщика», а второго и третьего участников полагать его помощниками, то четвертого участника можно назвать игроком из «засады».
На рис. 4, в представлены два случая. В первом случае траектория преследователя заканчивается непосредственно в точке цели Т, причем в этой точке вектор скорости преследователя перпендикулярен вектору скорости цели V. Во втором случае вектор скорости точки Q направлен противоположно вектору скорости цели Vr. Точка Q расположена на прямой линии, проведенной из точки Т по направлению вектора Vr (см. рис. 4, в). Если произвольно ука- зать точку Q в любой точке плоскости преследования, то мы не сможем достичь цели.
После достижения точки Q можно изменить стратегию преследователя. Например, скорость может быть снижена до нуля. В этом случае стратегия сводится к ожиданию момента приближения цели на расстояние, меньшее г.
После достижения точки Q стратегия четвертого преследователя может совпадать со стратегией первого преследователя.
Цель объекта преследования в рассматриваемой модели – уклонение от первого преследователя.
На рис. 5, а показана стратегия преследуемого объекта. Объект Т, движущийся с поступательной скоростью Vr и с угловой скоростью шТ , совершает за период дискретизации ДТ поворот на угол шТ • ДТ и перемещается на расстояние \Т4 — Т| = iVr| • ДТ. Направление вращения точки Т зависит от того, в какой полуплоскости находится преследователь Р 1 .
В качестве альтернативной стратегии может быть избрана стратегия «параллельной скорости», показанная на рис. 5, б, из которого видно, что объект преследования Т изменяет направление вектора своей скорости V, стремясь двигаться параллельно направлению вектора скорости преследователя V 1 . Стратегия параллельной скорости предпочтительна, если преследователь находится далеко от цели. Когда преследователь приближается на дистанцию нескольких итерационных шагов (дистанция «последнего прыжка»), для цели становится выгодна стратегия уклонения (см. рис. 5, б).
Выводы и заключение
На основе материалов, представленных в статье, составлен программный модуль в пакете компьютерной графики MathCAD, рассчитывающий траектории движения группы из четырех преследователей и цели, уклоняющейся от преследователей.
Каждый участник погони в рассматриваемой геометрической модели имеет свою собственную цель и стратегию. На рис. 6 показан кадр видео-
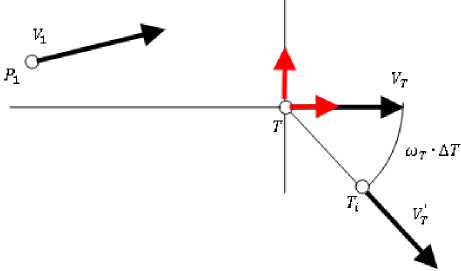
Рис. 5, а. Стратегия объекта преследования
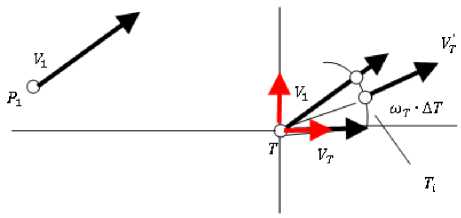
Рис. 5, б. Дополнительная стратегия объекта преследования
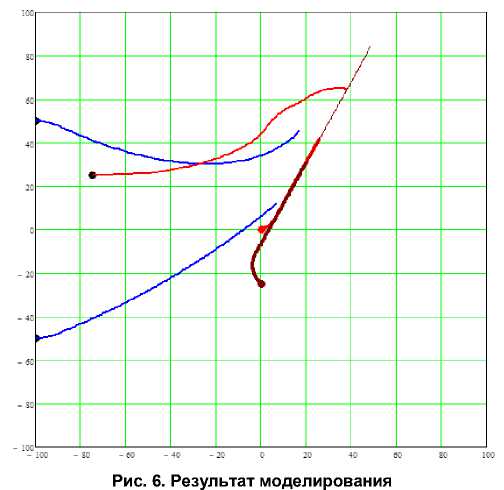
группового преследования одиночной цели
фильма, где один преследователь совершает погоню «по следу», а два преследователя догоняют цель по параллельной траектории. Еще один преследователь движется ортогонально к траектории цели. В разработанном программном модуле изменены цель и стратегия четвертого преследователя для упрощенного указания координат точек входа и векторов скорости в этих точках.
Статья подготовлена на основе теоретических положений, изложенных в работах [1–6]. Описание алгоритмов следования рекомендованным траекториям размещено на ресурсе [7]. На ресурсе [8] представлен видеофильм с результатами геометрического моделирования в рамках разработанного программного модуля. Исходный код программы доступен на ресурсе [9]. При создании и разработке алгоритмов использованы работы [10–20].
Список литературы Геометрическая квазидискретная модель группового преследования одиночной цели
- Айзекс, Р. Дифференциальные игры / Р. Айзекс. - М.: Мир, 1967.
- Понтрягин, Л.С. Линейная дифференциальная игра убегания. Тр. МИАН СССР / Л.С. Понтрягин. - 1971. - Т. 112. - С. 30-63.
- Красовский, Н.Н. Позиционные дифференциальные игры / Н.Н. Красовский, А.И. Субботин. - М.: Наука, 1974.
- Желнин, Ю.Н. Линеаризованная задача преследования и уклонения на плоскости / Ю.Н. Желнин // Ученые записки ЦАГИ. 1977. -№ 3. - Т. 8. - С. 88-98.
- Бурдаков, С.В. Алгоритмы управлением движения мобильным роботом в задаче преследования / С.В. Бурдаков, П.А. Сизов // Научно-технические ведомости Санкт-Петербургского государственного политехнического университета. Информатика. Телекоммуникации. Управление. - 2014. - № 6 (210). - С. 49-58.
- Симакова, Э.Н. Об одной дифференциальной игре преследования / Э.Н. Симакова // Автоматика и телемеханика. - 1967. - № 2. -С. 5-14.
- Алгоритм следования прогнозируемым траекториям в задаче преследования. -http://dubanov.exponenta.ru (дата обращения: 22.07.2019)
- Видео, групповое преследование одиночной цели. - https://www.youtube.com/watch?v= aC4PuXTgVS0&feature= youtu. be
- Групповое преследование с различными стратегиями одиночной цели. - http:// dubanov. exponenta. ru.
- Вагин, Д.А. Задача преследования жестко скоординированных убегающих / Д.А. Вагин, Н.Н. Петров // Известия РАН. Теория и системы управления. - 2001. - № 5. - С. 75-79.
- Банников, А.С. Некоторые нестационарные задачи группового преследования /А.С. Банников // Известия Института математики и информатики УдГУ. - 2013. - Вып. 1 (41). - С. 3-46.
- Банников, А.С. Нестационарная задача группового преследования / А.С. Банников // Труды Математического центра имени Н.И. Лобачевского. - Казань: Изд-во Казанского математического общества, 2006. - Т. 34. - С. 26-28.
- Изместьев, И.В. Задача преследования маломаневренных объектов с терминальным множеством в форме кольца / И.В. Изместьев, В.И. Ухоботов // Материалы международной конференции «Геометрические методы в теории управления и математической физике: дифференциальные уравнения, интегрируемость, качественная теория» Рязань, 15-18 сентября 2016 г., Итоги науки и техн. Сер. Соврем. мат. и ее прил. Темат. обз., 148. - ВИНИТИ РАН, М., 2018. - С. 25-31.
- Константинов, Р.В. О квазилинейной дифференциальной игре с простой динамикой при наличии фазового ограничения / Р.В. Константинов //Математические заметки. - 2001. -Т. 69. - Вып. 4. - С. 581-590.
- Панкратова, Я.Б. Решение кооперативной дифференциальной игры группового преследования / Я.Б. Панкратова // Дискретный анализ и исследование операций. - 2010. - Т. 17. - № 2. - С. 57-78.
- Петросян, Л.А. Теория игр / Л.А. Петро-сян, Н.А. Зенкевич, Е.В. Шевкопляс. - СПб.: БХВ-Петербург, 2012. - 424 с.
- Петросян, Л.А. Преследование на плоскости / Л.А. Петросян, Б.Б. Рихсиев. - М.: Наука, 1991. - 94 с.
- Петросян, Л.А. Геометрия простого преследования / Л.А. Петросян, Г.В. Томский. - Новосибирск: Наука, 1983. - 143 с.
- Петров, Н.Н. Одна задача простого преследования с фазовыми ограничениями / Н.Н. Петров // Автоматика и телемеханика. - 1992. - № 5. - С. 22-26.
- Петров, Н.Н. Многократная поимка в примере Л.С. Понтрягина с фазовыми ограничениями /Н.Н. Петров //Прикладная математика и механика. - 1997. - Т. 61. - Вып. 5. - С. 747-754.
