Геометрические аспекты контактного взаимодействия балансов в корообдирочном барабане

Автор: Марков Борис Георгиевич, Марков Олег Борисович, Доспехова Наталья Анатольевна
Журнал: Ученые записки Петрозаводского государственного университета @uchzap-petrsu
Рубрика: Технические науки
Статья в выпуске: 11 (105), 2009 года.
Бесплатный доступ
Математическое моделирование, контактное взаимодействие, трехмерная модель, корообдирочный барабан
Короткий адрес: https://sciup.org/14749529
IDR: 14749529
Текст статьи Геометрические аспекты контактного взаимодействия балансов в корообдирочном барабане
Подготовка древесины к использованию в целлюлозно-бумажном производстве требует ее очистки от коры. Эта технологическая операция выполняется в настоящее время с применением корообдирочных барабанов. В целях совершенствования технологии очистки выполняются теоретические и экспериментальные исследования [1], [8], [9], [10], [11], [17]. Экспериментальные исследования функционирования корообдирочных барабанов в реальных производственных условиях возможны в весьма ограниченном диапазоне технологических характеристик. Поэтому все более важную роль по мере развития информационных технологий играют методы математического моделирования [15]. В данной области исследований конкретные примеры использования численных методов при моделировании технологического процесса очистки древесины в корообдирочном барабане приведены в статьях [4], [5], [6], [13], [14], [16].
Удаление коры происходит в процессе соударений балансов друг с другом и с корпусом ба
рабана при условии, что появляются силы, достаточные для преодоления ее сцепления с древесиной. В современных условиях для определения этих сил все большее распространение получает метод дискретных элементов [16], [17]. По причине относительной новизны этого метода не все аспекты его практического применения при моделировании технологического процесса очистки древесины в корообдирочном барабане исследованы достаточно подробно. Так, к числу наименее изученных относятся геометрические аспекты контактного взаимодействия древесины в корообдирочном барабане.
В данной статье рассматриваются вопросы определения величины и формы пятна контакта для различных положений соударяющихся балансов, поскольку именно они в первую очередь влияют на производительность и качество окорки древесины.
Корпус корообдирочного барабана (рис. 1) представляет собой цилиндр (1), внутренний диаметр которого равен D КБ, а длина – L КБ.
По внутренней поверхности цилиндра вдоль его оси расположены ножи (2) с шагом О н и окнами для удаления коры (3).
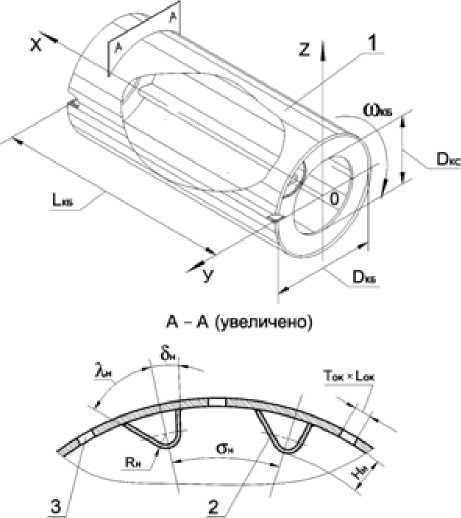
Рис. 1. Корпус корообдирочного барабана
Поверхность баланса в реальности представляет собой цилиндроид. Однако учитывая малую величину некруглости сечений баланса и небольшое расхождение между максимальным и минимальным диаметрами при математическом моделировании, каждый баланс можно рассматривать как прямой круговой цилиндр диаметром D Б и длиной L Б . При этом предполагаем, что масса древесины равномерно распределена по объему и баланс покрыт корой равномерной толщины t k (рис. 2).
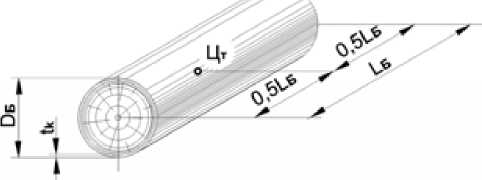
Рис. 2. Модель баланса
В объеме, ограниченном корпусом барабана, вращающегося со скоростью ю КБ , каждый баланс перемещается как тело, имеющее шесть степеней свободы. В каждый момент времени балансы занимают определенное положение относительно друг друга, а также относительно ножей и стенок барабана. Для определения положения балансов в данный момент времени введем систему координат, связанную с осью барабана (рис. 3).
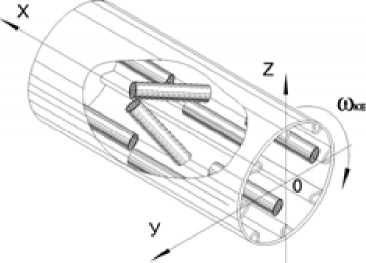
Рис. 3. Привязка системы координат к корообдирочному барабану
Положение i -го баланса в системе координат XУZ задаем центром тяжести ЦТi ( xЦi yЦi zЦi ) и направлен и ем, которое определяется единичным вектором eБi или его координатами – косинусами углов, образованных заданным направлением с положительными направлениями осей координат (направляющие косинусы) (рис. 4).
tR = cos aR, mR = cos BG, nR = cos yG, (1) Б Б, Б Б, Б Б, где lБ - косинус угла наклона прямой к оси абсцисс (0x), mБ – косинус угла наклона прямой к оси ординат (0y), nБ – косинус угла наклона прямой к оси аппликат (0z), аБ - угол наклона прямой к оси абсцисс (0x), в Б - угол наклона прямой к оси ординат (0y), YБ - угол наклона прямой к оси аппликат (0z).
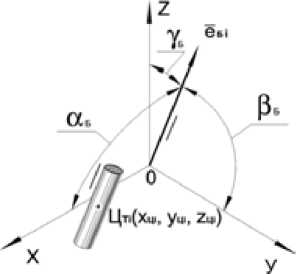
Рис. 4. Схема привязки баланса к принятой системе координат
Для определения пары соприкасающихся бревен надо перебрать все множество лесоматериалов, находящихся в барабане, на предмет определения кратчайшего расстояния между ними. Балансы будут соударяться, если это расстояние окажется меньше нуля. На первом этапе отбросим неперспективные на предмет соударения объекты. Соударения не будет, если расстояние между центрами тяжести бревен удовлетворяет условию:
LБi + LБj + DБi + DБj
x Ц ХЦ)
>
где xЦi , xЦj – абсциссы центра тяжести i-го и j-го бревен; LБi , LБj –длины i-го и j-го бревен; DБi , DБj – диаметры i-го и j-го бревен.
На втором этапе определим кратчайшее расстояние между осями балансов ( 8 ) из выражения:
ХЦ x j
± tBi
Бi
yji УЦ zji zUj mБi nБi
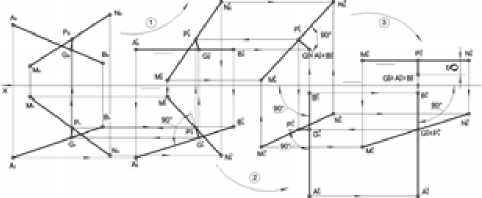
Рис. 6. Схема решения задачи методами геометрического моделирования
Бi
Бj
P
Бj
m Бj
n Бj
mБi
+
mБi
nБi
+
nБi
m Бj
m Бj
n Бj
n Бj
£K
Бi
Бj
где x Цi , x Цj , y Цi , y Цj , z Цi , z Цj – координаты центров тяжести i-го и j-го бревен; I Бi , ^ б , mБi , тБ , nБi , п Б, — направляющие косинусы осей i-го и j-го бревен.
На третьем этапе отбросим все пары бревен, у которых величины 8 удовлетворяют условию:
DR, + Dr,
8> —--Б-
.
Для решения задачи плоскопараллельным переносом преобразуем модель так, чтобы баланс АВ занял положение, перпендикулярное фронтальной плоскости проекций, а MN – параллельное горизонтальной плоскости проекций (в принятой системе координат ось бревна АВ выродится в точку A 2 = B 2 ). За счет этого сложная задача построения перпендикуляра между двумя прямыми преобразуется в задачу простого измерения расстояния 8 . Недостаток этой методики заключается в том, что преобразования производятся в три этапа. С целью оптимизации процесса преобразования воспользуемся методами аналитической геометрии [7], [12].
И наконец, на четвертом этапе определим точки на осях балансов, соответствующие кратчайшему расстоянию. Эти точки будем называть точками скрещивания осей балансов. На рис. 5 показана геометрическая модель (чертеж) положения i-го и j-го бревен в пространстве. Отрезки AB и MN моделируют оси лесоматериалов. На рис. 6 приведена схема решения задачи по определению кратчайшего расстояния между отрезками методами геометрического моделирования [2], [3]. Отрезок прямой PG перпендикулярен осям AB и MN и поэтому является наименьшим расстоянием между ними.
Сначала произведем параллельный перенос начала координат в центр тяжести i-го баланса (рис. 7).
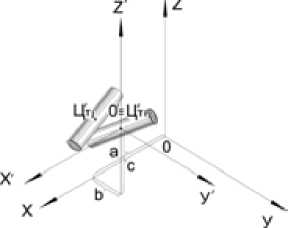
Рис. 7. Схема параллельного переноса начала координат в центр тяжести i-го баланса
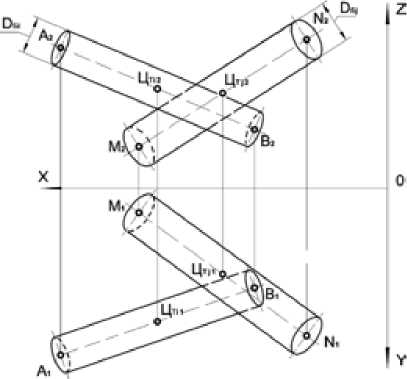
Рис. 5. Исходная геометрическая модель положения i-го и j-го бревен в пространстве
ХЦ i = 0 , y Ц i = 0 , z Ц i = 0 . (5)
Новые координаты центра тяжести j-го баланса найдем из выражений:
Х Ц, Х Ц a , У Ц,■ = Уц, - b , zj■ = z jj - c ,
где xЦj , yЦj , zЦj – старые координаты центра тяжести j-го баланса; Х ц, ■ , У ц, ■ , Z j,■ - новые координаты центра тяжести j-го баланса; a = Х ц -величина переноса начала координат по оси 0x; b = У ц ,- - величина переноса начала координат по оси 0y; c = Z ji - величина переноса начала коор-
динат по оси 0z; xЦi , yЦi , zЦi – старые координаты центра тяжести i-го баланса.
Направляющие косинусы i-го и j-го балансов после параллельного переноса останутся неизменными.
|
x |
y |
z |
|
L Bi |
m Б i |
n Б i |
|
£' Бj |
m Б j |
n Б j |
= 0
.
£ Bi = £ Ei , £ Ej £ Ej , m E i m b i , m Б j = m Б j , n Б i = n Б i , n Б j = n Б j .
Приведем выражение (10) к общему виду уравнения пло скости:
Затем произведем поворот осей координат так, чтобы ось ординат ( 0y ) совместилась с осью i-го бревна, а ось аппликат ( 0z ) стала перпендикулярна плоско сти σ , параллельной осям i-го и j-го балансов (рис. 8).
Ax + By + Cz = 0 , (11)
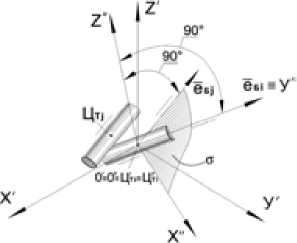
Рис. 8. Схема поворота осей координат
где
А – ( mБ ′ inБ ′ j - mБ ′ jnБ ′ i ) ,
В - ( n Ei £ Ej — n Ej £ Ei ) ,
С - ( £ Ei m Ej — £ Ej m Ei ) .
Уравнение прямой, проходящей через начало координат перпендикулярно плоскости σ , имеет вид:
x y z A = B = C .
С другой стороны, уравнение этой же прямой в канонической форме имеет вид:
Новые координаты центра тяжести j-го баланса получим из выражений:
ХЦ = £ 1 ХЦ + m l y Ц + n 1 z m ,
У Ц = £ 2 Xj + m 2 У Ц + n 2 z ' , (8)
z m = £ з x m + m 3 уц + n з z m ,
x = y = z
£ 3 m 3 n 3 .
Соответственно, направляющие косинусы оси 0 z , совпадающей с этой прямой, с учетом (11) будут равны:
где £ 1 - косинус новой оси x" относительно старой оси x' , £ 2 - косинус новой оси у относительно старой оси x , £ 3 - косинус новой оси z ′′ относительно старой оси x ′ , m 1 – косинус новой оси x ′′ относительно старой оси y ′ , m 2 – косинус новой оси y ′′ относительно старой оси y ′ , m 3 – косинус новой оси z ′′ относительно старой оси y ′ , n 1 – косинус новой оси x ′′ относительно старой оси z ′ , n 2 – косинус новой оси y ′′ относительно старой оси z ′ , n 3 – косинус новой оси z ′′ относительно старой оси z ′ .
Определим величины направляющих косинусов новых осей координат относительно старых. Ось 0 y ′′ совпадает с осью i-го баланса, соответственно, направляющие косинусы этой оси с учетом (7) будут равны:
£з = (mEnE j - mE jnE^, m3 = (nE i£ E j - nE j£ Ei ) , (14)
n з = (£'з т ^Е] -£‘ зj m Ed.
Для нахождения направляющих косинусов оси 0 x используем определитель преобразования поворота Δ .
|
£ 1 |
£ 2 |
£ з |
|
|
Δ= |
m 1 |
m 2 |
m 3 |
|
n 1 |
n 2 |
n 3 |
£ 2 = ^ Ei, m 2 = m Ei , n 2 = n Ei . (9)
Ось 0 z ′′ перпендикулярна плоскости σ , параллельной осям i-го и j-го бревен. Выражение, задающее подобную плоскость σ , проходящую через начало координат, имеет вид:
Так как сумма квадратов элементов одной строки определителя Δ равна 1,
£2 + £22 + £2 = 1, m12+m22+m32=1 , (16)
n 1 2 + n 2 2 + n 3 2 = 1 .
Преобразовав выражения (16), найдем направляющие косинусы оси 0 x ′′ .
t l = 7 1 - £ 22 - ^ 2 3 , m 1 = 1 - m 2 2 - m 3 2 , (17)
n 1 = 1 - n 2 2 - n 3 2 .
Новые направляющие косинусы j-го баланса получим из выражений:
£ Бj = £ 1 £ Bj + m l m Bj + n 1 nB j , m j = £ 2 t j + m 2 m j + n 2 n ‘ , (18)
n Bj = £ 3 ^ Бj + m 3 m Б j + n 3 n Б j .
Угол ϕ < 90 ° будем называть межосевым углом i-го и j-го балансов, он равен:
to = arccos £". , Бj
где £ ‘‘ j - косинус угла наклона прямой к оси абсцисс (0x) j-го баланса на преобразованной модели (рис. 9).
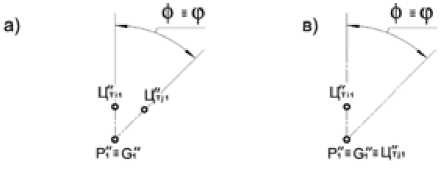
Угол соударения ( φ ) равен углу (рис. 10), вершиной которого является точка скрещивания осей балансов ( G 1 ′′ , P 1 ′′ ), а сторонами – направления на центры тяжести i-го и j-го балансов ( P 1 ′′ ЦТ ′ i ′ 1 и G 1 ′′ ЦТ ′ j ′ 1 ). В зависимости от взаимного положения точек контакта и центров тяжести балансов угол φ может быть острым ( φ ≤ 90 ° ) (рис. 10а) или тупым ( φ ≥ 90 ° ) (рис. 10б). Если один отрезок (рис. 10в) или оба (рис. 10г) вырождены ( P 1 ′′≡ ЦТ ′ i ′ 1 , G 1 ′′≡ ЦТ ′ j ′ 1 ), то указанный угол будет острым.
Геометрическая модель (рис. 5) после вышеперечисленных преобразований примет вид, приведенный на рис. 9. Точками скрещивания осей балансов являются точки P и G. Расстояния от центра тяжести баланса до точки скрещивания осей балансов ( L Цi и L Цj ) определим из выражений:
LЦ i = | xG - xЦ i |, (19)
L Цj = ( x P - x Ц j )2 + ( y P - y Ц j )2, (20)
где LЦ i – расстояние от центра тяжести i-го баланса до точки скрещивания осей балансов; LЦ j – расстояние от центра тяжести j-го баланса до точки скрещивания осей балансов; xG , xЦ i , xP , xЦ j – координата х соответствующих точек: G , ЦТ i , P , ЦТ j ; yG , yЦ i , yP , yЦ j – координата y соответствующих точек: G , ЦТ ′ i , P , ЦТ j .
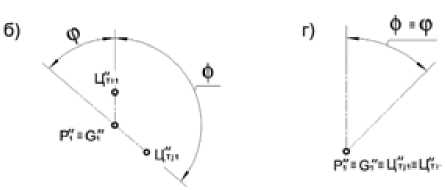
Рис. 10. Схема определения угла соударения
Если (( LЦi - LЦij ) ×( LЦj - LЦij )) < 0, то:
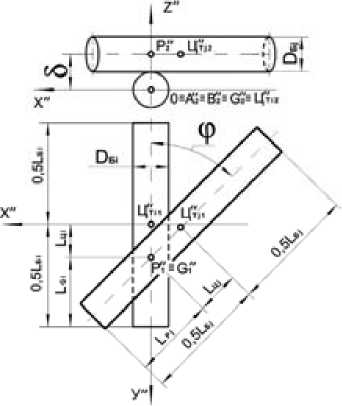
Рис. 9. Преобразованная геометрическая модель
φ = (180 ° - ϕ ) , иначе φ = ϕ , (22)
где LЦij – расстояние между точками ЦТ ′ i ′ 1 и Ц Т ′ j ′ 1 .
LЦij = ( xЦ ′′ i - xЦ ′′ j ) + ( yЦ ′′ i - yЦ ′′ j ). (23)
Расстояния от точки скрещивания осей балансов до ближних торцов i-го и j-го бревен определим по формулам:
L Gi = L Цi - 0,5 L Бi , L Pj = L Цj - 0,5 L Бj , (24)
где LGi – расстояния от точки скрещивания осей балансов до ближнего торца i-го баланса, LРj – расстояния от точки скрещивания осей балансов до ближнего торца j-го баланса, LБi – длина i-го баланса, LБj – длина j-го баланса.
Эти величины ( LGi и LРj ) положительны, если точки скрещивания осей балансов находятся между торцами балансов, и отрицательны, если снаружи.
L Gi > 0, если 0,5 L Бi< L^ , LPj > 0, если 0,5 L^ < LЦ| .
На рис. 11а, 11в, 11г изображены крайние положения пар соударяющихся балансов. Балансы не соприкоснутся, если
L G, > LKi или L Pj > L Kj , (26)
где LКi , LКj – максимальные расстояния от торцов i-го и j-го балансов до точки их скрещивания ( Р "= G " ), при которых возможно соударение.
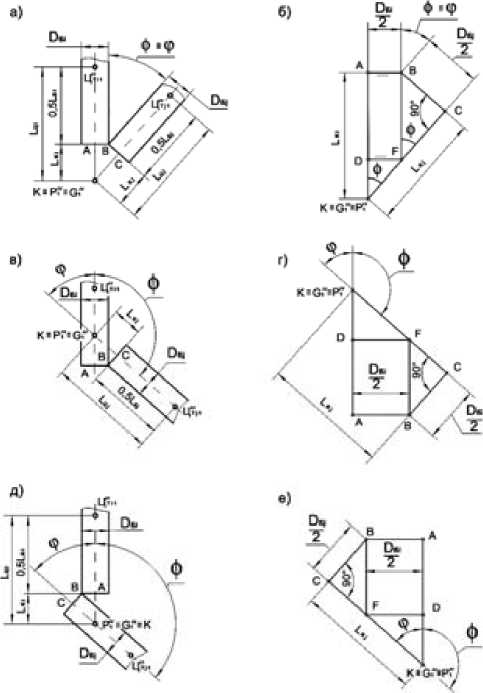
Рис. 11. Схемы крайних положений пар соударяющихся балансов
LKi = -Б^- + j , LKj = D^ + J^ . (27) 2sin ф 2 tg ф 2 tg ф 2sin ф
Далее отбросим пары балансов, у которых LG или LРj отрицательны и больше вышеупомянутой величины:
( L Gi < 0 и L Gi >1 l k |) или ( L Pj < 0 и L Pj >1 L K.i I).
После того как пары балансов прошли через предварительный отбор, который заключается в отсеивании вариантов, удовлетворяющих условиям (4) и (28), рассмотрим возможные соударения балансов и условия их возникновения.
С геометрической точки зрения в процессе очистки древесины в корообдирочном барабане могут иметь место следующие случаи взаимодействия пары балансов.
-
1. Боковая поверхность баланса – боковая поверхность баланса.
-
1.1. Пятно контакта в форме эллипса или его части (рис. 12).
-
1.2. Пятно контакта в форме прямоугольника (рис. 13).
-
-
2. Боковая поверхность баланса – ребро торцевой поверхности баланса (рис. 14).
-
3. Торцевая поверхность баланса – ребро торцевой поверхности баланса (рис. 15).
-
4. Ребро торцевой поверхности баланса – ребро торцевой поверхности баланса (рис. 16).
-
5. Торцевая поверхность баланса – торцевая поверхность баланса (рис. 17).
Очевидно, что перечисленные виды технологических ситуаций не в полной мере описывают поведение балансов в барабане. Необходимо учесть и соударение балансов с элементами корпуса корообдирочного барабана, так как особенности формы этих элементов могут существенно затруднить моделирование. Однако и в этих случаях возможно использование предложенной методики для геометрического моделирования при соответствующей ее доработке. Поскольку рассмотрение появляющихся в этой связи вопросов выходит за рамки данной работы, мы предполагаем посвятить им отдельную статью.
Работа выполнена при поддержке Российского фонда фундаментальных исследований, проект № 08-08-00979.
Для определения величин LКi и LКj воспользуемся схемами, приведенными на рис. 11б, 11г, 11д. Учитывая равенство отрезков AD и FB, а также то, что LKi = KD + AD и LKj = KF + Cf (величины отрезков FC и FB найдем из треугольника FBC, отрезков KD и KF – из треугольника KDF), получим:
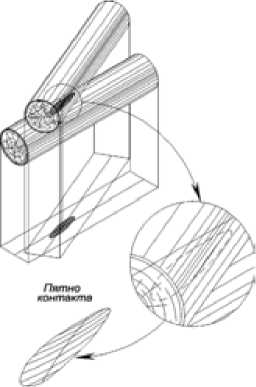
Рис. 12. Соударение пары балансов боковыми поверхностями с образованием пятна контакта эллиптической формы
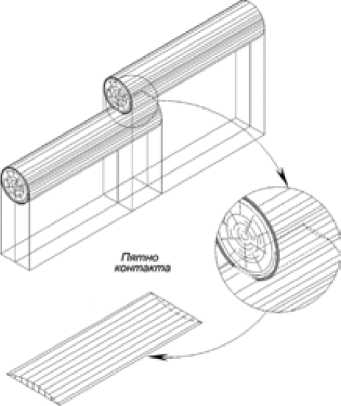
Рис. 13. Соударение пары балансов боковыми поверхностями с образованием пятна контакта прямоугольной формы
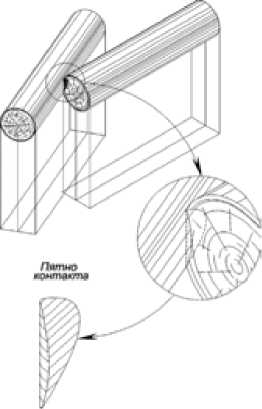
Рис. 14. Соударение пары балансов боковой поверхностью и ребром торцевой поверхности
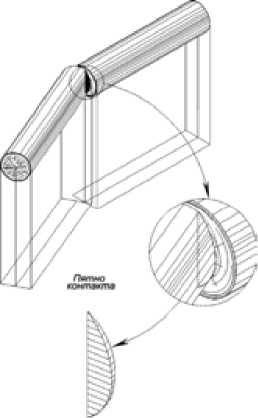
Рис. 15. Соударение пары балансов торцевой поверхностью и ребром торцевой поверхности
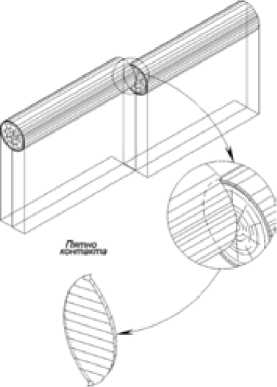
Рис. 16. Соударение пары балансов ребрами торцевых поверхностей

Рис. 17. Соударение пары балансов торцевыми поверхностями
Список литературы Геометрические аспекты контактного взаимодействия балансов в корообдирочном барабане
- Бойков С. П. Теория процессов очистки древесины от коры. Л.: ЛГУ, 1980. 152 с.
- Вальков К. И. Введение в теорию моделирования. Л.: ЛИСИ, 1974. 178 с.
- Вальков К. И. Начертательная геометрия, инженерная графика. М.: Высшая школа, 1997. 486 с.
- Васильев А. С., Никонова Ю. В., Раковская М. И. Математическое моделирование технологического процесса очистки древесины в корообдирочном барабане//Ученые записки Петрозаводского государственного университета. Сер. «Естественные и технические науки». 2008. № 1. С. 117-119.
- Васильев С. Б., Колесников Г. Н., Никонова Ю. В., Раковская М. И. Влияние локальной жесткости корпуса корообдирочного барабана на изменение силы соударений и величину потерь древесины//Ученые записки Петрозаводского государственного университета. Сер. «Естественные и технические науки». 2008. № 4. С. 84-91.
- Васильев С. Б., Колесников Г. Н., Никонова Ю. В., Раковская М. И. Исследование закономерностей изменения силы соударений с целью снижения потерь при окорке древесины в барабане//Известия Санкт-Петербургской лесотехнической академии. 2008. Вып. 185. С. 258-264.
- Крутицкая Н. И., Тихонравов А. В., Шишкин А. А. Аналитическая геометрия и линейная алгебра с приложениями. М.: Изд-во МГУ, 1991. 192 с.
- Локштанов Б. М. Исследование процесса окорки березовой древесины в барабанах: Дис. … канд. техн. наук. Л., 1972. 188 с.
- Матюнин В. Я., Коперин Ф. И. Некоторые вопросы теории окорки древесины в корообдирочных барабанах//Известия вузов. Лесной журнал. 1972. № 2. С. 64-69.
- Оскерко В. Е. Новый принцип окорки лесоматериалов//Строительные и дорожные машины. 2007. № 3. С. 13-16.
- Пигильдин Н. Ф. Окорка лесоматериалов (теория, технология, оборудование). М.: Лесн. пром-сть, 1982. 192 с.
- Привалов И. И. Аналитическая геометрия: Учебник. СПб.: Лань, 2008. 304 с.
- Раковская М. И., Никонова Ю. В. Численное моделирование и определение сил контактного взаимодействия длинномерных сортиментов в корообдирочном барабане//Системы управления и информационные технологии. № 1.3 (31). Воронеж: Научная книга, 2008. С. 397-401.
- Раковская М. И., Никонова Ю. В., Васильев А. С. Об алгоритме метода дискретных элементов применительно к исследованию технологического процесса очистки древесины в окорочном барабане//Информационные технологии моделирования и управления. № 1 (44). Воронеж: Научная книга, 2008. С. 119-124.
- Самарский А. А., Михайлов А. П. Математическое моделирование. Идеи, методы, примеры. 2-е изд., испр. М.: Физматлит, 2005. 320 с.
- Шегельман И. Р., Васильев А. С., Колесников Г. Н., Никонова Ю. В. Моделирование технологического процесса очистки древесины в корообдирочном барабане с применением метода дискретных элементов//Известия Санкт-Петербургской лесотехнической академии. 2008. Вып. 184. С. 258-264.
- Cundall P. A., Strack O. D. L. A discrete numerical model for granular assemblies//Geotechnique. 1979. Vol. 29(1). P. 47-65.
