Гибридное микроконтроллерное управление бесконтактным электродвигателем с постоянными магнитами

Автор: Соколов Александр Васильевич, Смирнов Юрий Сергеевич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 2 т.13, 2013 года.
Бесплатный доступ
Рассмотрен вариант повышения энергоэффективности электромехатронного преобразователя на основе бесконтактного электродвигателя с постоянными магнитами за счет совершенствования структурного, алгоритмического и информационного обеспечения процесса его управления. Возможность существенного влияния на выходные показатели бесконтактного электродвигателя с постоянными магнитами за счет вариаций алгоритмов и способов управления, формируемых микроэлектронной компонентой электромехатронного преобразователя, также способствует повышению энергоэффективности, но ведет к усложнению микроэлектронной компоненты. В этом случае актуальны поиски решений, минимизирующих аппаратные затраты за счет перехода на программные варианты реализации алгоритмов работы. Использование микроконтроллера общего применения, обеспечивающего управление с разнополярной коммутацией трехфазного бесконтактного электродвигателя с постоянными магнитами, и специализированного шестиканального драйвера силовых ключей упрощает задачу построения энергоэффективных электромехатронных преобразователей.
Энергоэффективность, электромехатронный преобразователь, бесконтактный электродвигатель с постоянными магнитами, микроэлектронная компонента, микроконтроллерное управление, мостовые усилители мощности и драйверы
Короткий адрес: https://sciup.org/147158230
IDR: 147158230 | УДК: 621.34:621.314
Hybrid microcontroller control brushless direct current motor with permanent magnets
A variant of energy efficiency electro-mechatronic converters based on brushless permanent-magnet motor by improving the structural, algorithmic and the infor-mation of the process to his control. Possibility effect on the output parameters of brushless permanent-magnet motor by variations of algorithms and methods control, microelectronic component formed electro-mechatronic converter also contributes to this, but it leads to complication of microelectronic components. It is important that the software implementations of algorithms minimize hardware costs. Microcontroller provides control with bipolar a three-phase switching of brushless permanent-magnet motor and specialized driver of a six-channel power switches. This simplifies the task of building energy-efficient electro-mechatronic converters.
Текст научной статьи Гибридное микроконтроллерное управление бесконтактным электродвигателем с постоянными магнитами
В [1] показана целесообразность повышения энергоэффективности электромехатронного преобразователя (ЭМТП) форм энергии и информации. Одним из перспективных вариантов решения этой задачи является комплексное совершенствование структурного, алгоритмического [2] и информационного [3] обеспечения процесса управления бесконтактным электродвигателем с постоянными магнитами (БЭПМ).
Наибольший интерес, с точки зрения построения самоорганизующихся ЭМТП, представляет вариант гибридного ЭМТП, в котором БЭПМ может работать поочередно в режиме шагового электродвигателя (ШЭД) и вентильного электродвигателя (ВЭД). При этом энергоэффективность БЭПМ в режиме ВЭД возрастет.
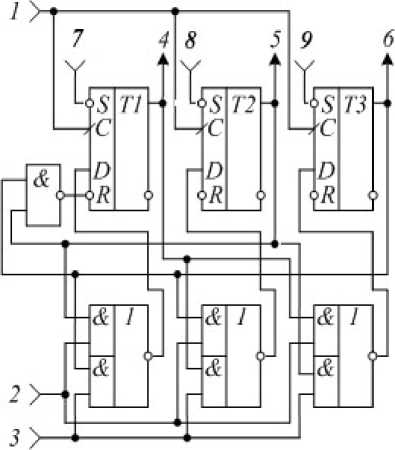
Если достигнутый уровень энергоэффективности достаточен, то возможно использование аппаратного подхода к проектированию. Аппаратный вариант формирования алгоритмического обеспечения гибридного управления при однополярной коммутации реализуется на основе поли-режимного распределителя импульсов (РИ) (рис. 1, а) [4], обеспечивающего шеститактную коммутацию ШЭД [5].
Такой РИ включает в себя три базовых элемента и обеспечивает на выходных шинах 4–6 чередование логических состояний при пошаговом управлении ...–100–110–010–011–001–101–100–..., соответствующее прямой коммутации, либо ...– 100–101–001–011–010–110–100–..., соответствующее обратной коммутации в зависимости от сигналов направления, поданных по шинам 2 и 3. В состав РИ включен корректирующий элемент ИНЕ, запрещающий появление на выходных шинах комбинации 111 и обеспечивающий автоматиче- ский переход от комбинации 000 к комбинации 011, т. е. в любом случае происходит переход к 6тактной коммутации.
В режиме пошагового управления по входу 1 поступают импульсы, количество которых определяет величину перемещения, а частота их следования – его скорость. В режиме самокоммутации сигнал от импульсно-потенциального датчика положения ротора на основе элементов Холла поступает по шинам 7–9 на S -входы D -триггеров РИ. Такое структурное построение позволяет осуществить путем тактирования по шинам 7–9 контроль информации пошагового управления, поступающей по шине 1 .
В отличие от самоорганизующейся информа-ционно-управляющей системы [6], предусматривающей вариации алгоритма управления БЭПМ, гибридная структура предусматривает изменение способа управления электродвигателем в зависимости от величины рассогласования. Она формируется на основе сравнения информации, запрограммированной в МК и полученной по каналу местной обратной связи (МОС). В режиме само-коммутации БЭПМ функционирует как самоорганизующееся устройство благодаря наличию МОС, которая содержит информацию о величине перемещения и его скорости. На основе анализа этой информации, ЭМТП самостоятельно, перед каждым единичным перемещением, принимает решение о выборе последующего способа управления и направления движения ротора.
Поскольку синхронизация движения ротора происходит в пределах одного полюсного деления многополюсного БЭПМ, то, набрав высокую скорость, ротор не может остановиться внезапно после подачи команды на останов, если он находится
а)
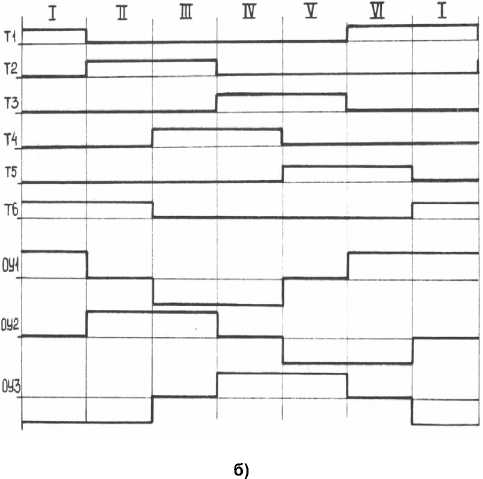
Рис. 1. Полирежимный распределитель импульсов (а) и диаграмма его работы (б)
в режиме самокоммутации. Для остановки его следует перевести в режим пошагового управления посредством предварительного торможения. Его траектория программируется в МК обычно в функции скорости движения ротора, которая определяется частотой следования импульсов по каналу МОС. При использовании единого информационного обеспечения ЭМТП на основе СКДУ цифровой эквивалент скорости формируется МК. Окончательное торможение ротора производится в пределах последнего пошагового перемещения.
Такой алгоритм функционирования ЭМТП позволяет не только существенно снизить время отработки больших рассогласований, но и обеспечить устойчивую работу релейной мехатронной системы. Мехатронный подход позволяет одновременно повысить энергоэффективность ЭМТП переводом БЭПМ в зоне устойчивого равновесия на элементарный алгоритм коммутации по команде, сформированной ЭМТП [6].
Повышение энергоэффективности БЭПМ как в режиме пошагового управления, так и самоком-мутации достигается за счет совершенствования микроэлектронной компоненты ЭМТП, обеспечивающей переход к разнополярной коммутации (рис. 1, б) обмоток управления (ОУ) БЭПМ. В отличие от аппаратной реализации (рис. 1, а) алгоритм управления 3-фазным БЭПМ с разнополярной коммутацией формируется МК в составе универсальной платы управления (УПУ). При этом применяется мостовое включение усилителей мощности, обеспечивающее изменение направления тока в соответствующих ОУ электродвигателя. Достоинством такого варианта повышения энергоэффективности является возможность реализации логической части УПУ БЭПМ на основе МК общего применения [7].
Структурная схема гибридного управления, состоящая из силового трехфазного инвертора ( ТИ ), генератора ( G ) сигналов управления, драйвера ( ДВ ) и БЭПМ представлена на рис. 2.
Элементом сопряжения МК с ТИ в УПУ является ИМС типа IR2131 , которая представляет собой 6-канальный ДВ управления ключами IGBT или MOSFET и имеющий три выхода для управления нижними ключами моста и три выхода для верхних ключей моста. В ней предусмотрена токовая защита, которая выключает все ключи и выдает сигнал ошибки FAULT , когда сигнал на входе ITRIP превышает 0,5 В. Организация такой защиты требует лишь правильного определения величины сопротивления резистивного датчика тока.
Входы драйвера ДВ согласуются с ТТЛ логикой, что позволяет управлять им с помощью микроконтроллеров с питанием +5 В без дополнительных преобразователей уровня. Микросхема IR2131 имеет отдельный вход выключения всех ключей и вход сброса сигнала ошибки FAULT . Допустимое напряжение на инверторе, с которым работает ИМС, составляет 600 В.
Транзисторы IRFZ24N ТИ управляются ИМС IR2131 , которая, в свою очередь, сигналы управления получает от МК типа ATTiny2313. МК осуществляет формирование управляющей последовательности сигналов и обработку сигнала ошибки. В качестве МК также могут использоваться другие микроконтроллеры фирмы Atmel [5]. Наличие разнообразных встроенных периферийных устройств (многоканальный аналого-цифровой преобразователь, компараторы, последовательные
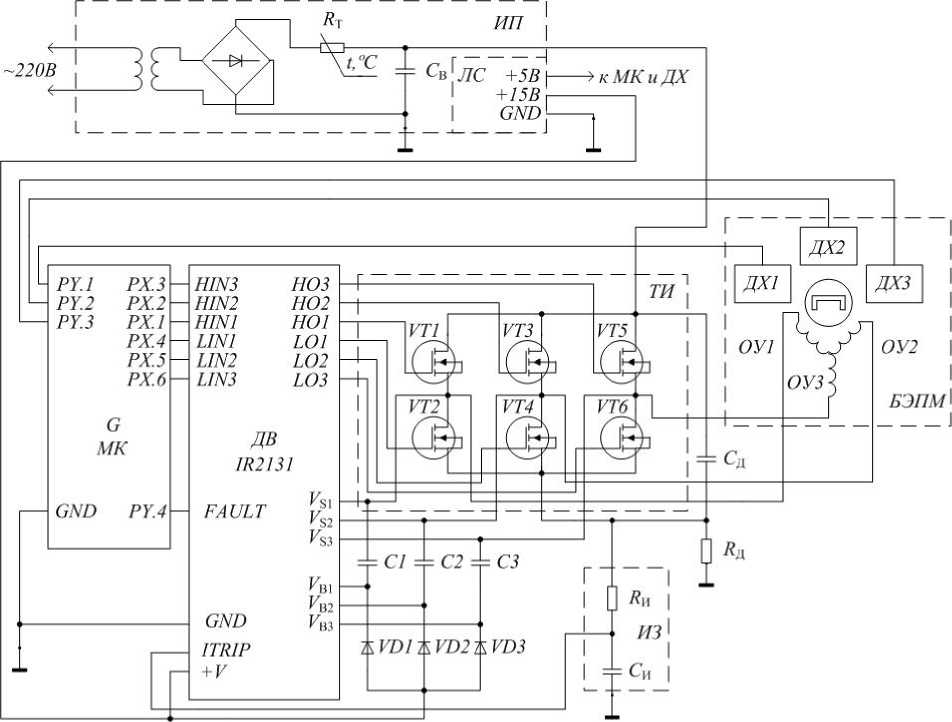
Рис. 2. Структурная схема гибридного управления с МК
порты, таймеры, модуль широтно-импульсной модуляции (ШИМ) и прочее) предоставляет широкие возможности для построения гибких и дешевых систем управления. Все микроконтроллеры имеют встроенную схему сброса по включению и снижению напряжения питания, «сторожевой» таймер и защиту кода от считывания [7]. В задачах управления ЭМТП возможна работа микроконтроллера от встроенного источника тактовых импульсов, максимальная частота которых достигает 8 МГц.
При использовании в источнике питания (ИП) конденсатора фильтра С В с большой величиной емкости и отсутствии элемента, ограничивающего ток заряда этого конденсатора, при каждом включении будут перегружаться диоды выпрямительного моста, что приведет к выходу их из строя. Для предотвращения «броска» тока через диоды выпрямителя необходимо включение терморезистора R Т. Для ЭМТП, в которых пульсациями момента на валу электродвигателя с частотой 100 Гц можно пренебречь, следует отказаться от использования конденсатора в мостовом выпрямителе, являющегося причиной появления «бросков» тока.
Демпфирующий конденсатор Сд (керамический или полипропиленовый) необходимо распо- лагать на минимальном расстоянии от транзисторов моста, поскольку IGBT и MOSFET транзисторы следует защищать от перенапряжений, которые будут возникать при коммутациях на индуктивностях схемы.
Питание МК , датчиков Холла ДХ1–ДХ3 и ДВ осуществляется от линейного стабилизатора ЛС , входящего в состав ИП . Бутстрепные емкости С1– С3 заряжаются через диоды VD1-VD3 при включении соответствующего нижнего ключа моста. Напряжение питания ИМС IR2131 лежит в диапазоне от 10 В до 20 В. Питающее напряжение меньше 8 В вызывает запирание ключей.
Сопротивление резистивного датчика тока R Д выбирается в зависимости от номинальной мощности БЭПМ и допустимой перегрузки по току. Интегрирующее звено ИЗ предотвращает ложное срабатывание токовой защиты в моменты коммутаций. При превышении сигналом на входе ITRIP уровня 0,5 В все ключи запираются и выдается сигнал ошибки FAULT .
При мощности ЭМТП до 5 кВт комплекс запитывается от сети переменного тока 220В, при этом рекомендуется использовать в трехфазном мосте транзисторы MOSFET ( VT1-VT6 ). При больших мощностях следует переходить на пита-
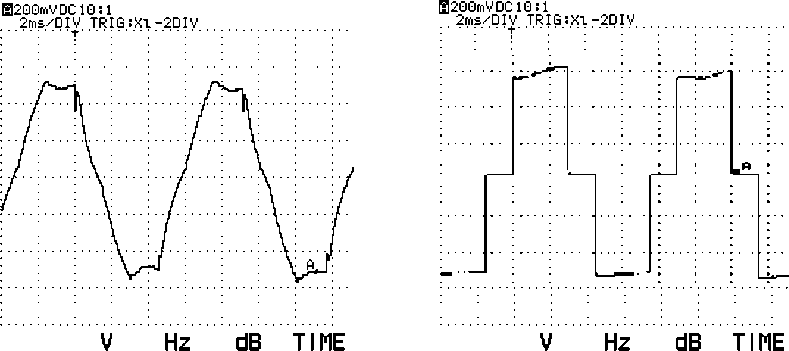
Рис. 3. Осциллограммы тока и напряжения в схеме гибридного управления с МК
ние от трехфазной сети 380 В, и использовать IGBT транзисторы.
Структура ЭМТП с микроконтроллерным управлением (см. рис. 2) позволяет реализовать управление БЭПМ в формате пошагового управления или самокоммутации со 180- или 120градусной коммутацией (см. рис. 1б). Осциллограммы тока и напряжения для этого случая представлены на рис. 3.
УПУ позволяет осуществлять следующие функции управления БЭПМ:
– пуск и остановку;
– изменение скорости вращения ротора;
– выбор направления вращения ротора.
Также просто осуществить пуск БЭПМ с требуемым пусковым моментом, используя формирование паузы перед сигналом сброса ошибки FAULT.
Список литературы Гибридное микроконтроллерное управление бесконтактным электродвигателем с постоянными магнитами
- Смирнов, Ю.С. Повышение энергоэффективности электромехатронных преобразователей энергии и информации/Ю.С. Смирнов, А.В. Соколов, Т.А. Козина//Труды научно-практической конференции «Актуальные проблемы автоматизации и управления». -Челябинск: Издат. центр ЮУрГУ, 2013. -С. 234-237
- Смирнов, Ю.С. Структурное и алгоритмическое обеспечение электромехатронных преобразователей/Ю.С. Смирнов, П.Б. Серебряков, А.В. Соколов//Вестник ЮУрГУ. Сер. «Компьютерные технологии, управление, радиоэлектроника». -2012. -Вып. 17. -№ 35. -С. 119-126.
- Смирнов, Ю.С. Информационное обеспечение самоорганизующихся электромехатронных преобразователей/Ю.С. Смирнов, Т.А. Козина, А.В. Соколов//Труды научно-практической конференции «Актуальные проблемы автоматизации и управления». -Челябинск: Издат. центр ЮУрГУ, 2013. -С. 169-172.
- Домрачев, В.Г. Цифроаналоговые системы позиционирования (Электромехатронные преобразователи)/В.Г. Домрачев, Ю. С. Смирнов. -М.: Энергоатомиздат, 1990. -240 с.
- Дискретный электропривод с шаговыми двигателями/под общ. ред. М.Г. Чиликина. -М.: Энергия, 1971. -624 с.
- Смирнов, Ю.С. Электромехатронные преобразователи информационно-управляющих систем/Ю.С. Смирнов, А.В. Соколов//Информационно-измерительные и управляющие системы и устройства: сб. тр. приборостроит. фак. -Челябинск: Издат. центр ЮУрГУ, 2011. -С. 197-205.
- Вставская, Е.В. Микропроцессорные средства систем управления: конспект лекций/Е.В. Вставская, В.И. Константинов. -Челябинск: Издат. центр ЮУрГУ, 2010. -91 с.
