Гидродинамическая смазка радиального подшипника повышенной несущей способности, обусловленной профилем его опорной поверхности и шероховатостью поверхности вала

Автор: Ахвердиев Камил Самедович, Александрова Екатерина Евгеньевна, Константинов Владимир Артемович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 3 (46) т.10, 2010 года.
Бесплатный доступ
В работе описан метод расчета радиального подшипника скольжения, близкого к круговому, при наличии шероховатости на поверхности вала. Предлагается конструкция некругового подшипника, обладающего по сравнению с круговым двукратно повышенной несущей способностью. Дана оценка влияния шероховатости поверхности вала на несущую способность подшипника.
Гидродинамическая смазка, радиальный подшипник, повышенная несущая способность
Короткий адрес: https://sciup.org/14250318
IDR: 14250318 | УДК: 621.
Hydrodynamic lubrication of a radial bearing of increased bearing capacity with barrel rotation unevenness
In this paper we present the calculation method of the gliding radial bearing similar to the circular one in the presence of unevenness on the barrel surface. As a result, we suggest the construction of a noncircular bearing which has twice as high bearing capacity in comparison with the circular one. Impact of barrel rotation unevenness on the bearing capacity of the bearing has also been estimated.
Текст научной статьи Гидродинамическая смазка радиального подшипника повышенной несущей способности, обусловленной профилем его опорной поверхности и шероховатостью поверхности вала
Исследованию влияния одномерной шероховатости поверхности на несжимаемую гидродинамическую смазку посвящено большое количество работ. Общее признание получила теория Кристенсена и Тондера [1,2], дающая усредненное описание такого влияния для опор (подшипников), использующих в качестве смазки несжимаемую жидкость. В указанных работах не исследованы вопросы прогнозирования оптимальной по несущей способности формы опорной поверхности. В них только лишь установлено, что путем варьирования значений характеристик движущейся шероховатой поверхности можно обеспечить повышенную несущую способность подшипника.
Постановка задачи. Рассматривается установившееся движение смазки в зазоре радиального подшипника, близкого к круговому, который предполагается неподвижным, а шип с шероховатой поверхностью движется вокруг своей оси с угловой скоростью 6. Пространство между шипом и подшипником заполнено вязкой несжимаемой жидкостью. Уравнения контуров вкладыша и шипа в полярной системе координат (r‘, 9) с полюсом в центре шипа можно записать в виде r ' = r1 + e cosG - A sin toG, r ' = r0 - A sin 69. (1)
Здесь r 0 и ситет;
r 1 соответственно радиусы кругового вала и кругового подшипника; е - эксцентри- А и ω - амплитуда и частота контурных возмущений на поверхности подшипника;
А и ω - амплитуда и частота контурных возмущений на поверхности шипа.
еAA
— = n < 1, — = П < 1, — = £ << 1, о = r - r .
δ , δ 1 , δ , 1 0
В качестве исходных уравнений берется следующая безразмерная система уравнений «тонкого слоя» для вязкой несжимаемой жидкости:
8 2 u _ dp 8T6 = d9 ’
8 u 8 u .
— + — = 0.
8 r 8 9
Здесь размерные величины r ', u ', u ', p' связаны с безразмерными r , u,u,p соотношениями:
* * Ptor r = r0 + or; и = toou; u = toru; p = p p, p = —^0-0 0 o2
•
где u', U - компоненты вектора скорости; рr - гидродинамическое давление; ц ский коэффициент вязкости.
Система уравнений (3) решается при следующих граничных условиях u = 0, и = 0 при r = 1 + ncos0 — П1 sin®0 = h(0);
u = 1, и = 0 при r = — e sin to*0 ; p (0) = p (2 п )•
Граничные условия на поверхности вала можно записать в виде:
— динамиче-
u(0,-esinto 0) = u(0,0)--0£srnю 0 + dr'r=0
u (0, - e sin to 0 ) = u (0, 0 )-- L_0 £ sin to 0 + .
a r i ' =0
• ••
• ••
= 1,
= 0.
С учетом (6) решение задачи (3) – (5) будем искать в виде рядов по степеням малого параметра ε :
w
u = Z ue, k=0
w k=0
w p=E Pkek • k=0
Подставляя (7) в (3) и (5) и сравнивая коэффициенты при одинаковых степенях ε с точ-
ностью до членов 0( e 2) , будем иметь:
d2 u 0 dp 0"d^ " d0 ’
d u .- u = 0; d r d 0
u 0 = 0, u = 0 при r = h (0 ); p 0 (0) = p 0 (2 n );
u 0 = 1, u 0 = 0 при r = sin to '0 ;
—= —, —1 + —1 = 0;
u1 = 0, u1 = 0 при r = h(0); p1(0) = p1(2n), u1 |r=0 =du°|r=0sin Ю0, U1 |r=0 =dUL |r=0sin Ю0.
d r d r
Решение задачи для нулевого (8) – (9) будем искать в виде [3-5]:
u о =^ ^ 0 + U o( r, 0 ); u d r
приближения. Точное автомодельное решение
задачи
0 =
—
V +
U о = u o ( ^ ); V о = U o (^)h00 );
V ( r ,0 ); dp 0 = c1^. + cl^tl ; 0 d0 h 2( 0 ) h 3( 0 )
^ = r I h ( 0 ); v 0 = V 0( f )•
Подставив (12) в (8)и (9), получим:
V 0 = с 2, 1
V 0 (0) = V 0 (1) = 0;
u^0 = 1,
U 0 — ^u 0 = 0;
u 0 = 0 при £ = 0;
й0 = o, u o = o при 5 = 1; J u0(5 ) d5 = 0; p (0) = p (2 n ).
Решение задачи (13) – (14) находится непосредственным интегрированием. В результате будем иметь:
V 0 = c 2 ( 5 2 - 5 ) ,
-
u O C 1
0 1 2
с1ξ2 ξ2
-
—
/ ~ X
k7 +1 5 + 1, к2 J
C 1 = 6.
Гидродинамическое давление р0 определяется из уравнения где
с 2 =
dp o = dθ
~
^“1
■ c 1 1 +
C2
h 2 ( θ ) h 3( θ )
~ ~
Перейдем к определению поддерживающей силы. Для безразмерных компонент R и R xy вектора поддерживающей силы и безразмерной силы трения Lтр в принятом нами приближении получим следующие выражения:
R y
R y r 0 p
2 π
J - p 0 cos9 d 9 = 6nn - 3 n 1
L тр
R x
—~ = 3 П 1
r 0 p
1 - cos(ro + 1)2п 1 - cos( ro - 1)2 п
го + 1
+
ro - 1
;
sin( го - 1)2 п sin( ro + 1)2 п
-
ro - 1
го + 1
;
Lδ тр µωr 0
2 π
= f V o
J h2
к h
+ u 0
h J
I , =0 d9 = - 2 п + — (cos2 nro - 1). ω
Перейдем к решению задачи (10) – (11).
С учетом (11) и (15) решение этой задачи запишется в виде u1
-
rh 2
л
+
J
c 1
—V + 4-
2 h 2 h
-
r sin ro 9 + —sin ro 9 .
h
Проинтегрировав второе уравнение системы (10) по r от 0 до h ( θ ) для определения родинамического давления p 1 , приходим к следующему уравнению:
гид-
-
h 3 dp 1 c 2sin го 9
-
12 dθ
4 h
- 2sin ro 9 = Q 1 .
Здесь Q 1 – добавочный расход, обусловленный шероховатостью поверхности вала. Используя граничные условия р 1 (0) = р 1 (2 π ) для Q 1 , получим следующее выражение:
12 Q = -3 c 2 J 4 (2 n )
1 J 3(2 π )
—
~
24 J 3 (2 π )
J 3(2 π )
.
2 π sin ω * θ 2 π d θ
.
Здесь J, (2 n ) = —г---- d 9 , J, (2 п ) = —г---
" J hk(9 ) k J hk(9 )
С учетом (20) для определения гидродинамического давления приходим к следующему уравнению:
dp1 dθ
3c 2 J 4 (2n) + 24 J 3 (2n)
J3(2π)h3 J3(2π)h3
—
* 3c2 sinωθ
h4
—
24 sinω*θ h3
.
Для безразмерных добавочных компонент поддерживающей силы будем иметь:
-—^
R yд об
R yд об
* r0 p
2π
ч
p cosθdθ; dθ
.—^
R x д об
R xд об
* r0 p
2π
-J
p sinθdθ.
dθ
С точностью до членов 0(εη), 0(εη1 ) для R yдоб и R xдоб получим:
~
Ryd o6 - 3
cos(to - 1 )2п - 1 , cos(to + 1 )2п - 1
* i 1 * , to -1 to +1
~
R xd0 6 - 3
sin( to - 1 )2 n sin( to + 1 )2 n
** to — 1 to + 1
В принятом нами приближении добавочная сила трения, обусловленная наличием шероховатости поверхности вала, определяется выражением
Lmp.g06 = to2*"(cos2nto - 1).
Таким образом, для безразмерных составляющих несущей способности и безразмерной силы трения окончательно получим:
^ ^ ^^
Ry - Ry + SRydoS ; Rx - Rx + ERxdo6 ; Lmp, - LmP + GLmpdo6 , где Rx,Ry,Lтр определяются формулами (18), а Ryдоб ,Rxдоб ,Lтр доб определяются форму- лами (23) и (24).
сущей способности показывают:
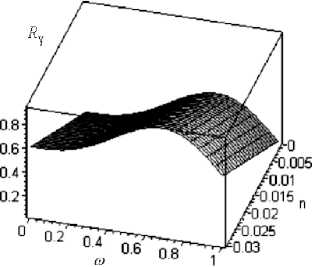
Зависимость безразмерной R y составляющей несущей способности от параметров η и ω
Выводы. Результаты численного анализа полученного аналитического выражения (25) для не-
-
1. При £ • to - 0,002, to - 1/2, n - П предложенная конструкция подшипника обеспечивает двукратно повышенную его несущую способность по сравнению со случаем, когда to - 0 (рисунок).
-
2. При n - n 1, to - 1 , варьируя характеристики микронеровностей ( £ и to ) поверхности вала, можно обеспечить еще более повышенную несущую способность подшипника. Заключение. Полученные в работе результаты позволяют разработать конструкцию радиального подшипника, который выдерживает максимальную нагрузку при заданных его размерах.
Список литературы Гидродинамическая смазка радиального подшипника повышенной несущей способности, обусловленной профилем его опорной поверхности и шероховатостью поверхности вала
- Сhristensen H., and Tonder K., "Tribology of Rough Surfaces: Stochasic Models of Hydrodynamic Lubrication" SJNTEF Report No, 10/69. 18, 1969.
- Кристенсен Тондер. Гидродинамическая смазка подшипника конечной длины с шероховатыми поверхностями//Проблемы трения и смазки. -1971. -№ 3. -С.9.
- Ахвердиев К.С. Математическая модель гидродинамической смазки бесконечно широких опор, работающих в турбулентном режиме на микрополярной смазке/К.С. Ахвердиев, А.Ю. Вовк, М.А. Мукутадзе, М.А. Савенкова//Трение и смазка. -2007. -№ 6. -С. 278-284.
- Ахвердиев К.С. Математическая модель гидродинамической смазки бесконечно широких опор, работающих в нестационарном турбулентном режиме на микрополярной смазке/К.С. Ахвердиев, М.А. Мукутадзе, М.А. Савенкова, А.Ю. Вовк//Вестник Ростовского государственного университета путей сообщения. -2007. -№ 4. -С. 18-24.
- Ахвердиев К.С. Математическая модель гидродинамической смазки радиального подшипника, работающего в нестационарном режиме на микрополярной смазке/К.С. Ахвердиев, М.А. Мукутадзе, М.А. Савенкова, А.Ю. Вовк//Вестник Ростовского государственного университета путей сообщения. -2008. -№ 1. -С. 6-12.
