Графоаналитический метод синтеза рычажных механизмов и расчеты на прочность

Автор: Ляшко Ф.Е., Вольсков Д.Г.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 3-2 т.11, 2009 года.
Бесплатный доступ
В статье авторы рассматривают методику синтеза рычажного механизма по соответствующей (или заданной) траектории выходного звена графоаналитическим методом с использованием Т-FLEX модели. Главной задачей синтеза здесь является генерация механизма по заданному полезному ходу ползуна. Оптимизации этого хода и выводят зависимость его хода (ползуна Д) от обобщенной координаты (например, φ).
Синтез рычажного механизма, траектория выходного звена, графоаналитический метод, генерация механизма
Короткий адрес: https://sciup.org/148198653
IDR: 148198653 | УДК: 531.8
Graph-analytic method for the synthesis of linkage and strength calculations
In this paper the authors examine the method of synthesis of the corresponding lever mechanism (or desired) trajectory of the output unit graphical method using T-FLEX model. The main objective of this synthesis is the generation of a useful mechanism for a given course of the slide. Optimization of this course and deduce the dependence of its speed (slide D) of the generalized coordinates (eg, j).
Текст научной статьи Графоаналитический метод синтеза рычажных механизмов и расчеты на прочность
На современном этапе, который характеризуется бурным развитием программного обеспечения вычислительной техники, возникают задачи проектирования механизмов методами, хорошо приспособленными к их реализации на вычислительных машинах.
Рассмотрим методику синтеза рычажного механизма по заданной траектории выходного звена графоаналитическим методом, основанным на построении его T-FLEX модели, а так же дальнейшая возможность расчета на прочность его трехмерной модели при помощи метода конечных элементов.
T-FLEX CAD – система параметрического автоматизированного проектирования и черчения. Она обеспечивает высокую степень гибкости и возможность изменения изображения при сохранении соотношений между элементами, предусмотренных разработчиком. Уникальный механизм параметризации и полный набор профессиональных инструментов компьютерного проектирования позволяют существенно упростить процесс конструирования и оформления графической документации. T-FLEX CAD позволяет использовать конструктору в CAD-программе опыт работы на кульмане.
Идея параметризации уже прочно завоевала свое место в компьютерном проектировании. Под параметризацией подразумевается, прежде всего, многократное использование чертежа с возможностью изменения его параметров.
го механизма (рис. 1).
Рассмотрим механизм, приведенный на рис. 1. Строим кинематическую схему механизма.
Пользуясь графическим способом нахождения скоростей, строим план скоростей (рис. 2).
Аналогично строим план ускорений (рис. 3).
Построенная T-FLEX модель наглядна и универсальна, так как позволяет определять положения, скорости и ускорения звеньев механизмов любой структуры и оценить их относительные величины с учетом функций, выполняемых механизмом, пересмотреть кинематические параметры в любых положениях с любым шагом, увидеть изменение этих параметров в динамике.
Синтез кинематической схемы механизма состоит в определении некоторых постоянных его параметров, удовлетворяющих заданным структурным, кинематическим и динамическим условиям, при этом одна часть этих параметров может быть задана, а другая должна быть определена.
В общем случае задачи синтеза механизмов являются многопараметрическими, так как число параметров механизма никогда не бывает однозначным.
Главной задачей синтеза механизма в нашем случае является генерация механизма по заданному полезному ходу ползуна D. Для механизма со структурной схемой изображенной на рис. 1, характерно то, что длина звена O2C постоянна, а движение точки С происходит по окружности. Для выполнения оптимизации полезного хода ползуна D нужно вывести зависимость его хода от обобщенной координаты ц, что и было сделано для ползуна.
Находим угол ф1
ф 1=arctg ( y+O1A • sin* )
( O1A • cos( ф) J .
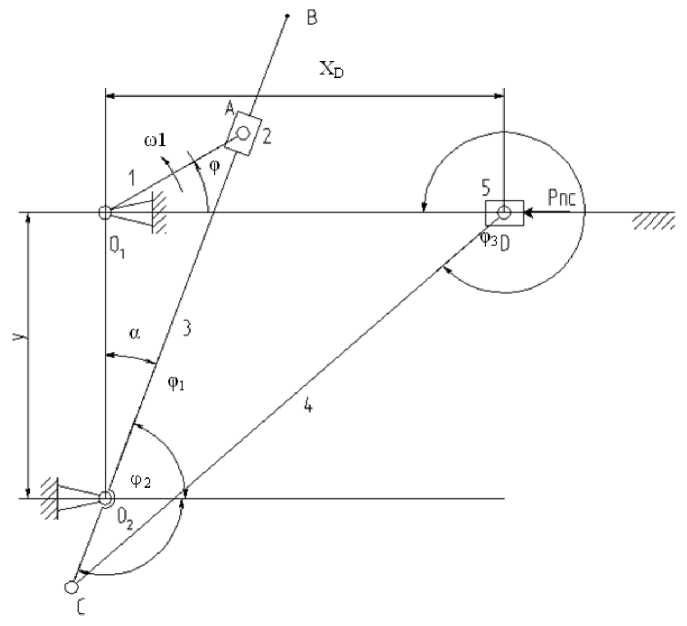
Рис. 1. Схема механизма
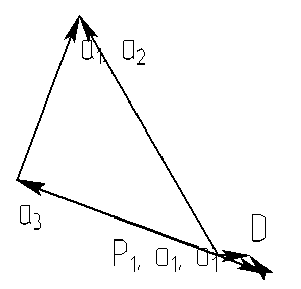
Рис. 2. План скоростей
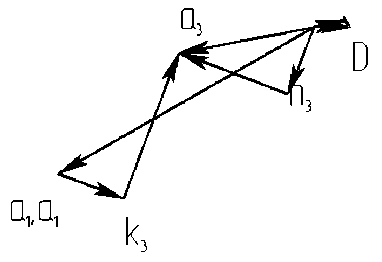
Рис. 3. План ускорений
Теперь необходимо определить величину O2A. По теореме косинусов имеем:
O2A у2 +01A2 +2 • у • O1A • sin( ф ) .
Угол ф2 будет равен ф2=п - ф1
а =arcsin
Г O1A )
к у 7
Выражаем величины XDmin и XDmax
Далее выражаем XD
п
XDmin=O2C- cos(- 2 -а)+CD- 1
O2C-sm( 2-а) + у CD
;
Xd=O2C • cos( ф 2) + CD • 1 -
O2C • sin( ф 2) + y
к
CD
Из геометрических зависимостей устанавли ваем, что значение Xc будет максимально и ми нимально тогда, когда O1A будет перпендику лярно O2A.
Отсюда находим угол а
-
-
-
п
X D max=O2C- cos(- 2+а)+CD- 1
O2C-sin( П+а) + у
CD
к
Тогда рабочий ход выходного звена будет равен
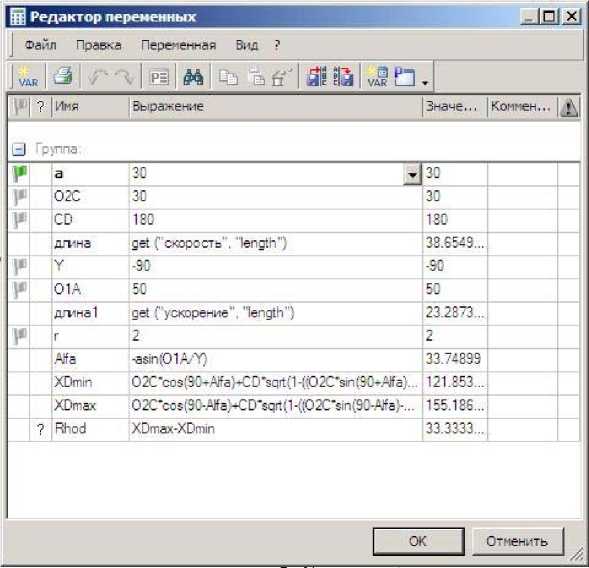
Рис. 4. Редактор переменных
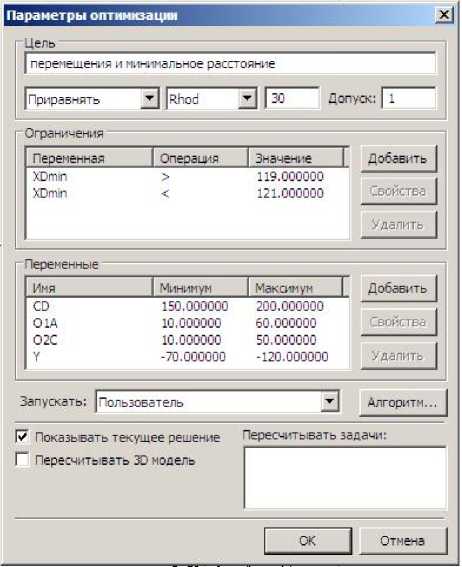
Рис. 5. Параметры оптимизации
Rhod=XDmax – XDmax.
Используем полученные зависимости в системе T-FLEX (рис. 4).
Для синтеза механизма воспользуемся вкладкой “Параметры” и выберем пункт “Оптимизация” (рис. 5).
В задании на оптимизацию задавались пределы изменения длин звеньев, а так же значение рабочего хода и Xdmin.
Производим расчет оптимизации. И по заданным параметрам система подбирает длину звеньев.
На основе 2D модели механизма создаем 3D модель, которая позволяет визуализировать кинематическую схему (рис. 7).
В 3D модель механизма (рис. 7) была учтена третья координата для положения выходного звена в пространстве и внесены некоторые изменения в формулы. Теперь для расчета XDmin и XDmax используется не длина звена CD, а его проекция на плоскость xoy. Где z – расстояние между xoy и выходным звеном.
CDId = V CD2 - z2
Все используемые выражения заносятся в редактор переменных (рис. 8).
Параметры длин звеньев и задание на оптимизацию остались такими же, как и в случае с 2D моделью, учитывая, что выходное звено находиться не в плоскости, а в пространстве.
Рассмотренная выше последовательность действий может быть применена на примере системы управления вертолетом (рис. 9).
Кинематическая схема построенная выше трансформируется в параметрическую модель механизма (рис. 10).
Производится увязка элементов конструкции при помощи параметров, что позволяет,
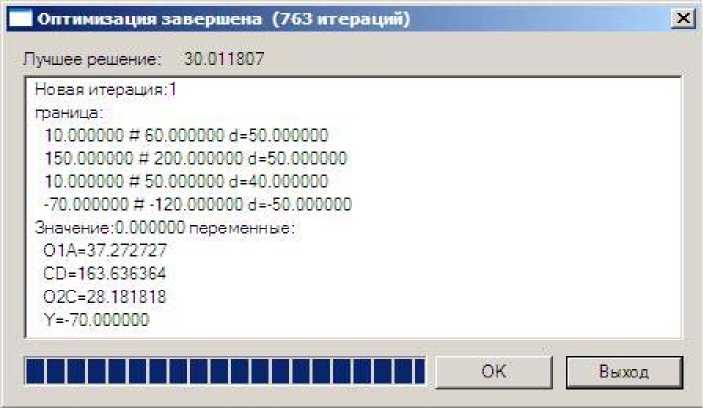
Рис. 6. Оптимизация
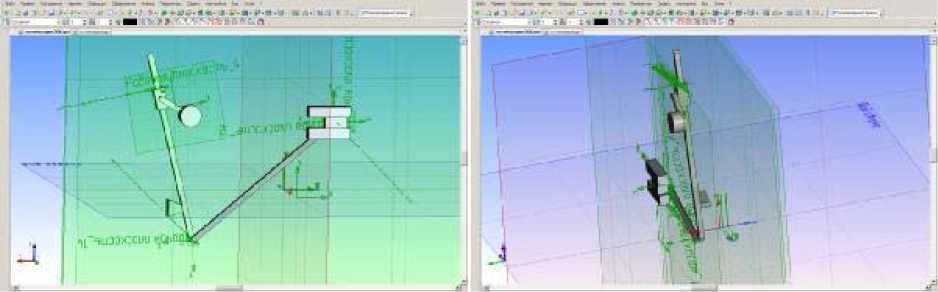
Рис. 7. Трехмерная модель механизма
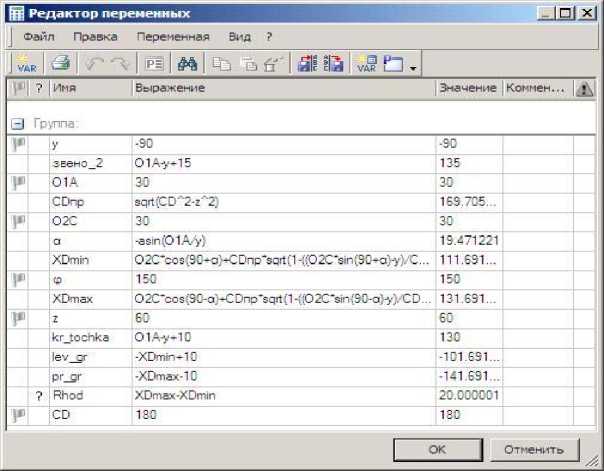
Рис. 8. Редактор переменных
редактируя значение параметров в редакторе переменных (рис. 11), изменять геометрические характеристики данного механизма, а так же задавая продольное и поперечное переме- щение ручки управления, наблюдать за его работой (рис. 12).
В редактор переменных вводится математическая зависимость рабочего хода выходного зве-
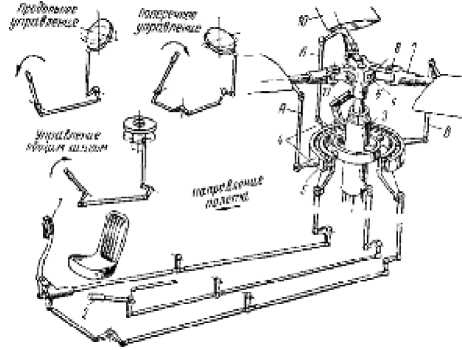
Рис. 9. Втулка вертолета и управление автома- том перекоса:
1 – ручка управления; 2 – рычаг общего шага; 3 – подвижная гильза; 4 – оси карданной подвески автомата перекоса; 6 – корпус втулки; 7 – ось осевого шарнира; 8 – ось вертикального шарнира; 9 – ось горизонтального шарнира; 10 – лопасть; 11 – шлиц шарнир; А,Б,В – тяги, со- единяющие внешнее кольцо автомата перекоса с лопастями на в зависимости от наклона ручки управления. Данная зависимость использует расчеты оптимизации для анализа величины рабочего хода, в зависимости от длин входных звеньев (рис. 13). Задавая граничные условия по изменению длин звеньев, а также соответствующие силы и величины, производится расчет рабочего хода на выходном звене.
По заданным пределам изменений длин звеньев система подбирает размеры, удовлетворяю-
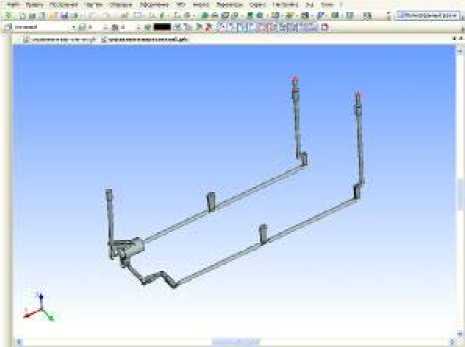
Рис. 10. Внешний вид механизма щие начальным и граничным условиям (рис. 14).
После расчета длин звеньев, производится прочностной расчет при помощи метода конечных элементов (рис. 15). Для этого предварительно необходимо расставив все силы с указанием мест их приложения и тип закрепления.
По результатам прочностного (рис. 16) расчета можно определить сильно и слабо нагруженные элементы конструкции и оптимально подобрать сечения звеньев, обеспечив тем самым требуемую прочность при минимальном весе.
Рассмотренный в данной статье метод позволяет производить синтез механизма по заданному закону движения выходного звена с помощью аналитической модели. Данный методом использует векторный контур и T-FLEX модели. По результатам оптимизации можно произвести расчет прочности и выявить слабые и сильные звенья конструкции.
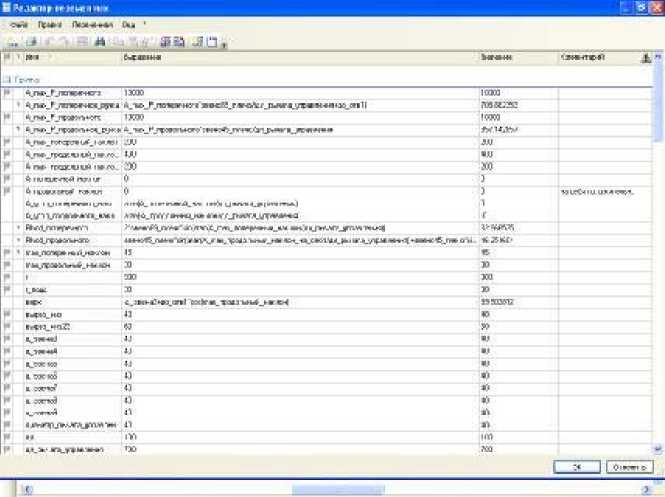
Рис. 11. Окно редактора переменных
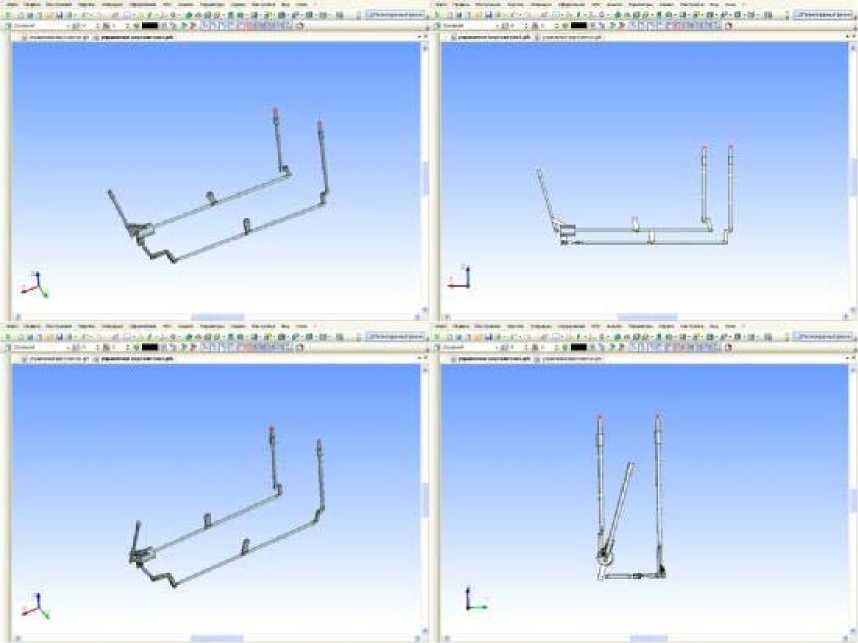
Рис. 12. Работающий механизм
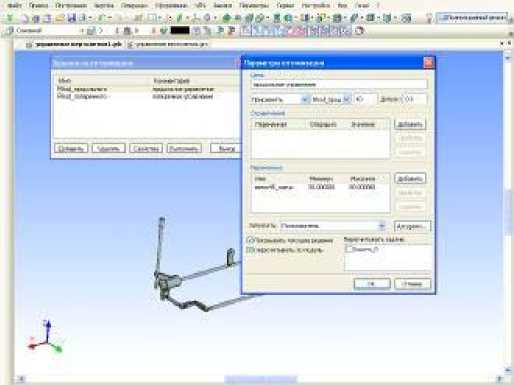
Рис. 13. Расчет оптимизации

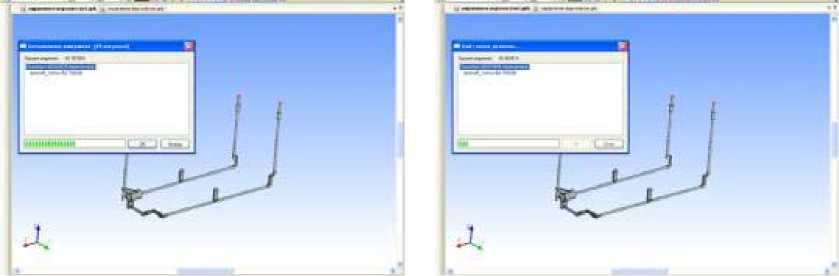
Рис. 14. Выполнение оптимизации
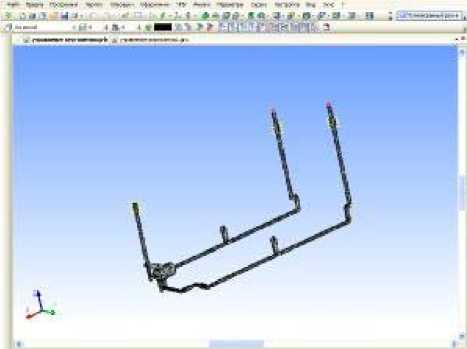
Рис. 15. Сетка метода конечных элементов
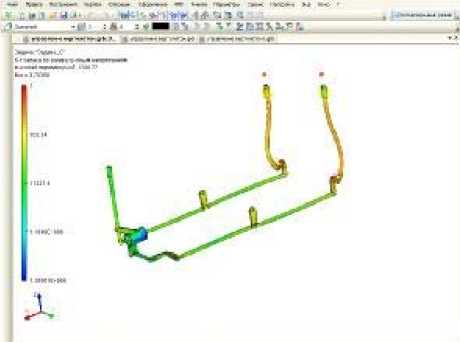
Рис. 16. Коэффициент запаса прочности
Список литературы Графоаналитический метод синтеза рычажных механизмов и расчеты на прочность
- Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов. 4-е изд., перераб. и доп. М.: Наука. 1988. 640 с.
- Левитский Н.И. Теория механизмов и машин: Учеб. пособие для вузов. 2-е изд., перераб. и доп. М.: Наука. 1990. 592 с
- Далин В.Н., Михеев С.В. Конструкция вертолетов: Учебник. М.: Изд-во МАИ, 2001. 352 с.
- Конструкция и прочность самолетов и вертолетов/Воскобойник М.С., Лагосюк Г.С., Миленький Ю.Д. и др. М.: Транспорт,1972. 440 с.
