Гребной электропривод на основе реактивной электрической машины для судов ледового класса

Автор: Гельвер Ф.А., Белоусов И.В., Самосейко В.Ф., Саушев А.В.
Журнал: Российская Арктика @russian-arctic
Статья в выпуске: 3 (26) т.6, 2024 года.
Бесплатный доступ
Представлены результаты теоретических и экспериментальных исследований гребного электропривода на основе реактивных электрических машин с анизотропной магнитной проводимостью ротора широкого мощностного ряда от 1,5 кВт до 1,7 МВт. Описаны конструкции различных исполнений и типов роторов таких электрических машин, представлены их достоинства и недостатки. Показано, что реактивные электрические машины имеют простую конструкцию, высокую надежность и по ряду эксплуатационных характеристик, безопасности, а также технологии изготовления, особенно для электрических машин большой мощности, превосходят все известные типы электрических машин. Приведено математическое описание реактивной электрической машины с анизотропной магнитной проводимостью ротора и составлена ее структурная схема в осях координат ротора d, q. Синтезирован алгоритм робастного управления гребным электроприводом применительно к судам ледового класса, предусматривающий настройку регуляторов тока намагничивания и тока нагрузки методом последовательной коррекции на технический оптимум. Синтез системы управления электроприводом выполнен для двух критериев: максимального быстродействия и наибольшего показателя энергетической эффективности. Представлены результаты апробации разработанных теории проектирования и теории управления реактивными электрическими машинами в гребном электроприводе. Проведенные теоретические и экспериментальные исследования доказали адекватность разработанной методики проектирования. Показана и доказана перспективность применения и широкие возможности гребного электропривода на основе реактивных электрических машин с анизотропной магнитной проводимостью ротора для судов ледового класса.
Гребной электропривод, суда ледового класса, синхронная реактивная электрическая машина с анизотропной магнитной проводимостью ротора, массогабаритные и энергетические показатели, робастность
Короткий адрес: https://sciup.org/170207420
IDR: 170207420 | УДК: 629.5.07 | DOI: 10.24412/2658-42552024-3-15-25
Electric propeller drive based on a reactive electric machine for ice-class ships
The article presents the results of theoretical and experimental studies of a propulsion electric drive based on reactive electric machines with anisotropic magnetic conductivity of the rotor of a wide power range from 1.5 kW to 1.7 MW. The designs of various versions and types of rotors of such electric machines are described, their advantages and disadvantages are presented. It is shown that reactive electric machines have a simple design, high reliability and, in terms of a number of operational characteristics, safety, and manufacturing technology, especially for high-power electric machines, surpass all known types of electric machines. A mathematical description of a reactive electric machine with anisotropic magnetic conductivity of the rotor is given and its structural diagram in the rotor coordinate axes d, q is compiled. An algorithm for robust control of a propulsion electric drive is synthesized for ice-class vessels, providing for adjustment of the magnetization current and load current regulators by the method of sequential correction to the technical optimum. The synthesis of the electric drive control system is performed for two criteria: maximum speed and the highest energy efficiency index. The results of testing the developed design theory and control theory of reactive electric machines in a propulsion electric drive are presented. The theoretical and experimental studies have proven the adequacy of the developed design methodology. The prospects of application and wide capabilities of a propulsion electric drive based on reactive electric machines with anisotropic magnetic conductivity of the rotor for ice-class vessels are shown and proven.in the subjects during descents in diving dosed circuit diving rebreathers with electronic control increased slightly and did not lead to the onset of symptoms of acute decompression sickness. This study remains relevant for working diving descents in open water, since the proposed methods make it possible to assess intravascular gas formation directly at the site of diving operations.
Текст научной статьи Гребной электропривод на основе реактивной электрической машины для судов ледового класса
Одним из приоритетных направлений развития судоходства является круглогодичное освоение Северного морского пути. Для решений этой задачи правительством выделяются средства на постройку новых судов ледового класса1 [1-2]. Такие типы судов, согласно правилам Российского морского регистра судоходства (РМРС), делятся на три класса: неарктические, арктические и ледокольные и предназначены для самостоятельного или совместного плавания, в зависимости от тяжести ледовых условий. Важнейшим элементом судов ледового класса является гребная установка, создающая упор или тягу для обеспечения хода судна. При этом устойчивой тенденцией является применение систем электродвижения, которые по сравнению с механическими системами передачи энергии от первичного двигателя к валу винта являются более универсальными, экономичными и приспособленными для управления процессом передачи электрической энергии от первичного двигателя к исполнительному механизму. Эти системы позволяют обеспечить жесткие требования эксплуатационного характера, к которым относятся: высокая надежность; большая перегрузочная способность во всем диапазоне частот вращения гребных винтов; практически неограниченное количество пусков и реверсов, которые должны быть реализованы за строго определенное время; высокие динамические нагрузки на электропривод гребных винтов, обусловленные резкими набросами и сбросами нагрузок.
В последние десятилетия интерес к системам электродвижения судов заметно вырос. Это обусловлено не только их достоинствами по сравнению с другими видами движения, но и возможностью получения регулировочных характеристик гребных установок, необходимых для плавания в условиях Арктики. Разработкой систем электродвижения занимаются ведущие компании судостроительной отрасли [3–5]. Несмотря на заметные успехи в этой области, нерешенным остается целый ряд вопросов, к основным из которых можно отнести следующие:
-
- постоянный рост установленной мощности систем электродвижения, вызванный необходимостью увеличения производительности грузоперевозок, а также удовлетворения все более высоких требований эксплуатационного характера и, как следствие, необходимости создания более мощных пропульсивных установок;
-
1 Чепур Е. Россия строит маршрут для всего мира. На него не жалко триллиона. Источник: Lenta.Ru, https://news.mail.ru/politics/36076795/?frommail=1 (дата обращения: 13.08.2024).
Ф.А. Гельвер, И.В. Белоусов, В.Ф. Самосейко, А.В. Саушев
ГРЕБНОЙ ЭЛЕКТРОПРИВОД НА ОСНОВЕ РЕАКТИВНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ДЛЯ СУДОВ ЛЕДОВОГО КЛАССА
-
- уход с отечественного рынка силовой электроники, электрического привода и судостроения в целом иностранных поставщиков, обусловленный геополитическими событиями, в связи с чем появились проблемы, связанные с невозможностью приобретения законченных изделий и элементов, необходимых для построения гребных электроприводов;
-
- нерешенные до настоящего времени ключевые вопросы в области проектирования и разработки отечественных систем электродвижения, к которым относятся: выбор типа используемой электрической машины, что особенно актуально для гребных электроприводов большой установленной мощности; разработка и проектирование преобразователя электрической энергии при ограничениях, которые устанавливаются на параметры существующей базы элементов; синтез системы управления, обладающей желаемыми статическими и динамическими характеристиками.
Следует отметить, что выбор типа электрической машины, в особенности для судов большой установленной мощности, оказывает существенное влияние на технико-экономические показатели гребного электропривода. Для судов ледового класса кроме удовлетворения требований эксплуатационного характера, таких как высокая перегрузочная способность, большая длительность перегрузок, значительное число реверсов и т.д., выбор приводного электродвигателя связан с принципиальной возможностью его технической реализации, а также возможностью обеспечения его охлаждения и отвода тепла, особенно с поверхности ротора.
Кроме указанных проблем, важнейшее значение при разработке гребных электроприводов имеют задачи синтеза оптимальных по заданному критерию алгоритмов управления гребным электроприводом. От выбора алгоритма управления во многом зависят энергетические и эксплуатационные показатели качества главной энергетической установки судна. При этом с ростом энерговооруженности судов роль алгоритмов управления становится все более важной.
Целью статьи является краткое изложение теоретических и экспериментальных исследований, проведенных авторами, которые направлены на решение основных рассмотренных выше проблем для электропривода гребных винтов судна на основе применения реактивной электрической машины с анизотропной магнитной проводимостью ротора (РЭМАМПР).
Конструкция РЭМАМПР
Отличительной особенностью и существенным преимуществом конструкции реактивных электрических машин является отсутствие обмотки на роторе машины и, как следствие, отсутствие электрических потерь в роторе. Следовательно, в такой электрической машине отсутствует необходимость охлаждения ротора и отвода от него тепла, что особенно важно для машин большой мощности. Одной из самых перспективных разновидностей реактивных электрических машин применительно к гребному электроприводу судов ледового класса является РЭМАМПР [6].
Статор такой электрической машины конструктивно ничем не отличается от статора широко распространенного асинхронного электродвигателя. Основной особенностью машины является ротор, который конструктивно может иметь два исполнения – с продольной и поперечной шихтовкой. Вид шихтовки определяет возможности машины и ее свойства. Причем ротор в обоих вариантах изготавливается с учетом обеспечения анизотропной магнитной проводимости, которая позволяет исключить расположение на роторе обмотки и тем самым получить уникальные свойства такой машины по сравнению с классической асинхронной машиной. Внешний вид возможных вариантов роторов такой машины приведен на рис. 1.
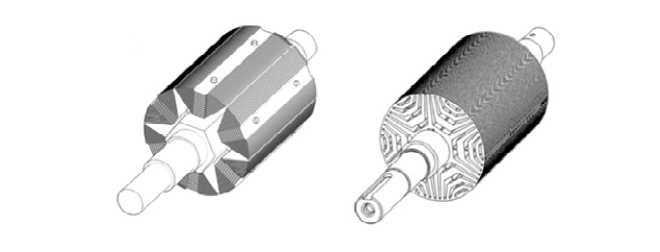
a) б)
Рисунок 1. Ротор РЭМАМПР c продольной а) и с поперечной б) шихтовкой
Принцип действия РЭМАМПР основан на пульсациях индуктивностей фазных обмоток статора и подробно изложен в работе [6].
Математическая модель и синтез алгоритмов управления
Математическое описание электромагнитных процессов, протекающих в обмотке статора РЭМАМПР, ничем не отличается от описания тех же процессов в асинхронной электрической машине и может быть представлено в виде:
U = R$,1$ + 〃{|<55(У)♦【s}
Исходное уравнение (1) содержит периодически меняющиеся коэффициенты, обусловленные вращением магнитного поля машины относительно неподвижного статора. Поскольку реактивная электрическая машина относится к классу синхронных машин, то для исключения переменных коэффициентов в уравнениях последние следует записать в осях координат ротора d, q :


Уравнения (2), (3) записаны в относительных единицах. Здесь * - символ относительных единиц; З б * 一 базовая относительная угловая скорость вращения ротора. При этом ток id является током намагничивания машины, а ток iq – током нагрузки.
Выражение для электромагнитного момента для цели управления машиной удобно записать через токи поперечного и продольного контуров:
"=("-£;)•"•『
В упрощенном варианте структурную схему РЭМАМПР можно представить в следующем виде (рис. 2.).
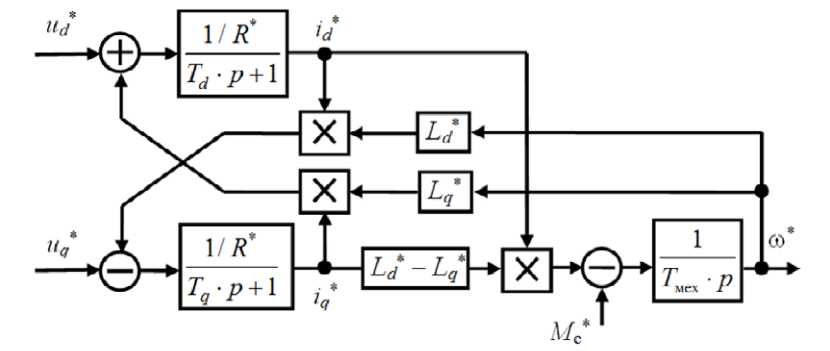
Рисунок 2. Упрощенная структурная схема РЭМАМПР в координатных осях d, q
Синтез системы управления осуществлялся с использованием алгоритма робастного управления, предусматривающего настройку регуляторов тока намагничивания и тока нагрузки методом последовательной коррекции на технический оптимум. Для реализации оптимальных алгоритмов управления РЭМАМПР и определения ее рабочих характеристик предложен алгоритм идентификация параметров РЭМАМПР [6]. В качестве критериев управления использовались критерии максимального быстродействия и наибольшей энергетической эффективности. Робастность управления обеспечивала учет возможных изменений параметров элементов машины вследствие их старения, износа и влияния внешних, возмущающих воздействий, прежде всего температуры окружающей среды, которая в условиях Арктики может принимать экстремальные значения.
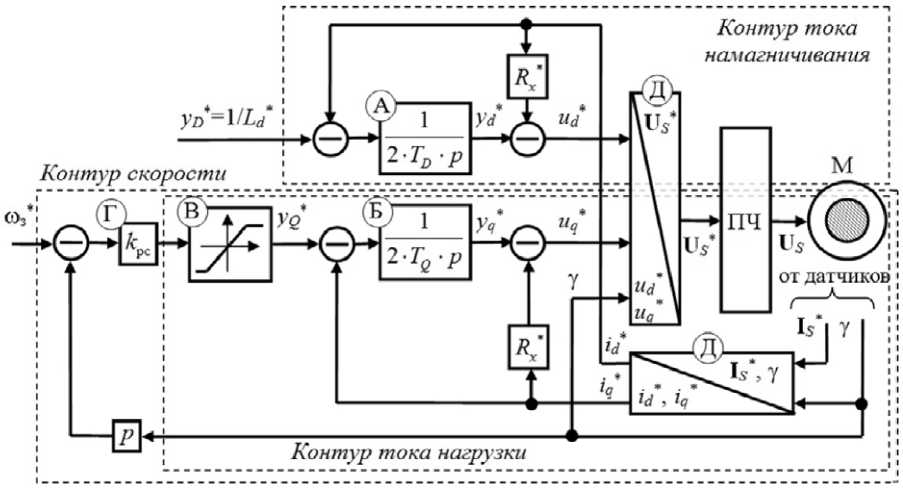
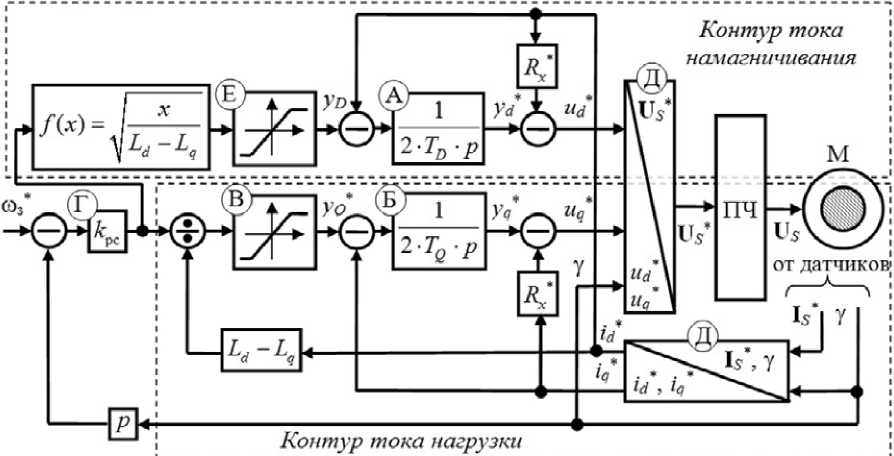
На рис. 3 приведены синтезированные структурные схемы системы управления РЭМАМПР при реализации максимального быстродействия (рис. 3 а) и наибольшей энергетической эффективности (рис.3 б).
а)
Контур скорости
б)
Рисунок 3. Структурные схемы системы управления РЭМАМПР, настроенные на а) максимальное быстродействие
б) наибольшую энергетическую эффективность
На рис. 3 пунктирными линиями и буквами выделены: регулятор тока намагничивания (А); регулятор тока нагрузки (Б); блок ограничения тока нагрузки (В); регулятор скорости (Г); блоки преобразования напряжений и токов статора (Д); блок ограничения тока намагничивания (Е); ПЧ – преобразователь частоты.
Синтез системы управления РЭМАМПР более полно рассмотрен в работе [7]. При этом для судов ледового класса предполагается в зависимости от условия плавания (внешних возмущающих воздействий), а также управляющих воздействий использовать адаптивный алгоритм управления по обоим критериям оптимальности.
Испытания РЭМАМПР
Для проверки и подтверждения теоретических исследований, а также для апробации разработанной методики проектирования РЭМАМПР, были изготовлены макетные и опытные образцы РЭМАМПР с различными возможными вариантами исполнения ротора. В частности, на основе серийно выпускаемой асинхронной машины мощностью 1,5 кВт был изготовлен шестиполюсный ротор для РЭМАМПР с продольной шихтовкой, который был установлен вместо ротора асинхронного электродвигателя. Спроектирован и разработан преобразователь электрической энергии, включая его систему управления. Успешно прошли апробацию алгоритмы управления РЭМАМПР, которые в дальнейшем использовались для управления более мощными опытными образцами.
ПАО «НИПТИЭМ» был изготовлен опытный образец РЭМАМПР мощностью 500 кВт с номинальным числом оборотов – 1000 об/мин. На базе Крыловского научного центра в филиале ЦНИИ СЭТ был спроектирован и изготовлен двухзвенный преобразователь частоты, который по топологии силовой части аналогичен классическому преобразователю частоты для асинхронного электродвигателя. В таблице 1 представлены характеристики опытного образца РЭМАМПР номинальной мощностью 500 кВт.
В рамках выполнения ОКР «Разработка комплекса электродвижения мелкосидящего ледокола, предназначенного для условий эксплуатации в акваториях Каспийского и Азовского морей», шифр «МСЛ-ЭДС» для проекта 22740 ООО «Электротяжмаш -Привод» изготовлены опытные образцы РЭМАМПР мощностью 1,63 МВт и 1,7 МВт. Спецификой опытных образцов РЭМАМПР являлась двухобмоточная конструкция статорной обмотки (шестифазная электрическая машина с двумя гальванически развязанными трехфазными обмотками). В ЦНИИ СЭТ был спроектирован и изготовлен двухзвенный преобразователь частоты. В табл. 1 представлены характеристики опытных образцов РЭМАМПР номинальной мощностью 1,63 МВт и 1,7 МВт. Пропульсивный комплекс мелкосидящего ледокола согласно проекта 22740 включает в себя два бортовых гребных винта и две центральные винто - рулевые колонки (ВРК).
На основе изготовленных электроприводов были проведены испытания и исследования поведения РЭМАМПР в различных режимах работы.
Врезультатеобработкиэкспериментальныхданных длямашины ДСРГ-1630-0,66-300 М4 были построены предельные характеристики, определяющие зависимость максимального момента от скорости, при ограничениях, установленных на значения тока и напряжения.
Таблица 1.
Испытанные опытные образцы реактивных электрических машин
Вид и марка машины
Технические характеристики
ДСРГ-1630-0,66-300 М4

|
Наименование параметра |
Значение |
|
Номинальная механическая мощность на валу, кВт |
500 |
|
Номинальное действующее значение линейного напряжения, В |
796 |
|
Номинальная частота питающего напряжени, Гц |
50 |
|
Схема соединения обмоток |
Y |
|
Номинальное действующее значение тока статора, А |
495 |
|
Коэффициент мощности |
0,77 |
|
Номинальная частота вращения, об/мин |
1000 |
|
Класс изоляции обмоток |
H |
|
Режим работы по ГОСТ IEC 60034-1 |
S1 |
|
Масса, кг |
2100 |
|
Тип шихтовки ротора |
поперечная |
|
Вид и марка машины |
Вид и марка машины |
|||||||
|
ДСРГ-1700-0,66-1000 М4 飢蒙 51^ |
||||||||
|
Наименование параметра |
Значение |
|||||||
|
Номинальная механическая мощность на валу, кВт |
1630 |
|||||||
|
Номинальное действующее значение линейного напряения, В |
660 |
|||||||
|
Номинальная частота питающего напряжения, Гц |
50 |
|||||||
|
Диапазон регулирования частоты питающего напряжения, Гц |
0..100 |
|||||||
|
Количество обмоток и схема соединения |
YY (со сдвигом 30˚эл.) |
|||||||
|
1 A 一 |
I*** |
Номинальное действующее значение тока статора, А |
2х949 |
|||||
|
Коэффициент мощности |
0,77 |
|||||||
|
КПД, % |
97,0 |
|||||||
|
Номинальная частота вращения, об/мин |
300 |
|||||||
|
1 蜜吧 |
Номинальный момент, кH |
51,888 |
||||||
|
... '^^^^ 一 |
||||||||
|
1 / |
Число выводов |
6 (1U, 1V, 1W, 2U, 2V, 2W) |
||||||
|
Класс изоляции обмоток |
F |
|||||||
|
Режим работы по ГОСТ IEC 60034-1 |
S1 |
|||||||
|
Масса, кг |
18000 |
|||||||
|
Тип шихтовки ротора |
продольная |
|||||||
|
ДСРГ-1700-0,66-1000 М4 ||ы |
||||||||
|
Наименование параметра |
Значение |
|||||||
|
Номинальная механическая мощность на валу, кВт |
1700 |
|||||||
|
Номинальное действующее значение линейного напряения, В |
600 |
|||||||
|
Номинальная частота питающего напряжения, Гц |
50 |
|||||||
|
Диапазон регулирования частоты питающего напряжения, Гц |
0..100 |
|||||||
|
Количество обмоток и схема соединения |
YY (со сдвигом 30˚эл.) |
|||||||
|
Номинальное действующее значение тока статора, А |
2х919 |
|||||||
|
Коэффициент мощности |
0,83 |
|||||||
|
КПД, % |
97,0 |
|||||||
|
Номинальная частота вращения, об/мин |
1000 |
|||||||
|
Номинальный момент, кH |
16,235 |
|||||||
|
Число выводов |
6 (1U, 1V, 1W, 2U, 2V, 2W) |
|||||||
|
Класс изоляции обмоток |
F |
|||||||
|
Режим работы по ГОСТ IEC 60034-1 |
S1 |
|||||||
|
Масса, кг |
6800 |
|||||||
|
Тип шихтовки ротора |
продольная |
|||||||
Статическая предельная механическая характеристика (рис. 4) иллюстрирует зависимость максимального значения момента электродвигателя в зависимости от скорости его вращения для длительного режима работы. Введенные ограничения обусловлены предельными возможностями электрической машины. При этом максимальные значения тока и напряжения электродвигателя равны соответствующим ее номинальным значениям.
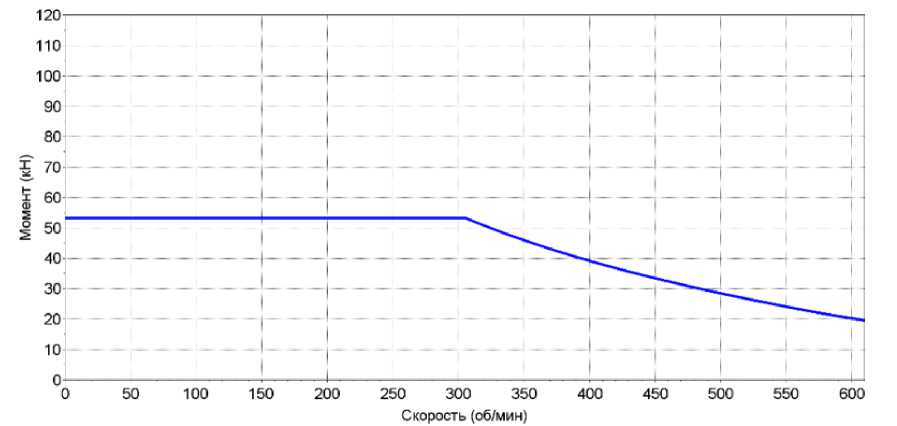
Рисунок 4. Статическая предельная механическая характеристика электропривода на основе машины ДСРГ-1630-0,66-300 М4
Динамическая предельная механическая характеристика электродвигателя (рис. 5) характеризует зависимость максимального значения момента в функции от скорости его вращения для кратковременного режима работы. Для этой характеристики ограничения обусловлены предельными возможностями электрического преобразователя.
rx) IHOJSOW
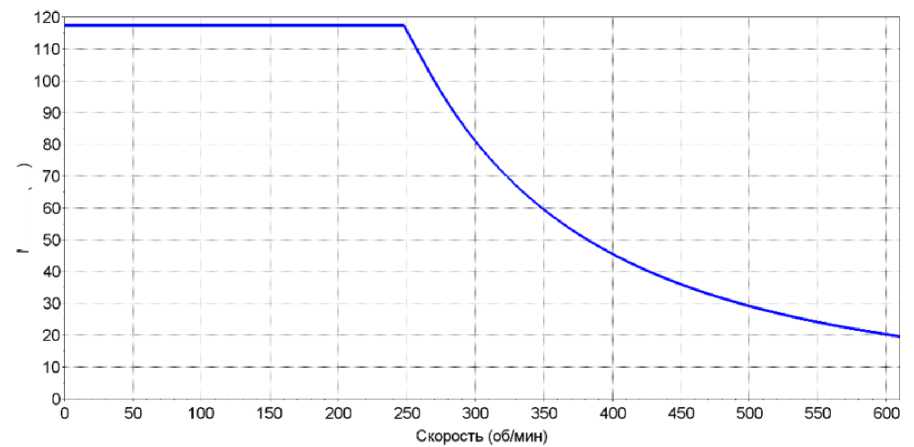
Рисунок 5. Динамическая предельная механическая характеристика электропривода на основе машины ДСРГ-1630-0,66-300 М4
Максимальный ток электродвигателя определяется максимально-допустимым током ключей электрического преобразователя. При этом необходимо учитывать колебания тока, вызванные широтно-импульсной модуляцией. Максимальное напряжение определяется максимально-допустимым напряжением ключей электрического преобразователя и конденсатора в звене постоянного тока. При этом нужно учитывать возможные повышения напряжения, вызванные кратковременными переходами электродвигателя в режим рекуперации. Также необходимо учесть перенапряжения, возникающие при закрытии ключей преобразователя из-за наличия паразитных индуктивностей шин.

Рисунок 6. Временные диаграммы тока нагрузки (iq) и тока намагничивания (id) и частоты вращения при пуске машины РЭМАМПР
Ограничительные характеристики можно разбить на три зоны в зависимости от скорости вращения электродвигателя. Работа двигателя от нулевой до синхронной скорости вращения соответствует первой зоне. В этой зоне ток равен максимальному значению, а напряжение меньше максимального. При скоростях выше синхронной, электродвигатель переходит во вторую зону. В этой зоне ток и напряжение равны своим максимальным значениям. При дальнейшем увеличении скорости начинается третья зона. В ней напряжение равно максимальному значению, а ток меньше максимального.
Графики значений тока нагрузки (iq) и тока намагничивания (id) при пуске электродвигателя приведены на рис. 6. Данные графики получены с использованием программного обеспечения, разработанного авторами статьи. Вывод контролируемых переменных производится в относительных единицах, что представляется наиболее наглядным и более доступным способом для анализа и обработки. Разработанное программное обеспечение позволяет осуществлять запуск электродвигателя в различных режимах работы, настраивать его параметры, а также наблюдать значения различных переменных системы управления в реальном масштабе времени.
Проведенные испытания подтвердили теоретические расчеты, доказали работоспособность разработанной методики проектирования РЭМАМПР, установили адекватность расчетных и экспериментальных значений показателей качества машины.
Преобразователь электрической энергии для РЭМАМПР
Теоретические расчеты и экспериментальные данные показали, что для синтеза гребного электропривода с РЭМАМПР могут быть использованы стандартные преобразователи электрической энергии, которые находят широкое применение для технической реализации систем частотного управления промышленным электроприводом. При этом перспективны и чаще всего применяются на практике структуры с двухзвенным преобразованием энергии на основе двухуровневых инверторов напряжения, а также различные варианты схем многоуровневых электрических преобразователей, которые используются с целью повышения их мощности. Следует заметить, что в последнем варианте существенно усложняется схемотехника силовой схемы, а также ухудшаются массогабаритные характеристики и снижаются показатели надежности [8, 9].
Многоуровневые электрические преобразователи могут быть схемотехнически построены на основе многоуровневых инверторов напряжения или на базе каскадных преобразователей частоты [10]. Второй вариант представляется более перспективным, надежным и универсальным, поскольку элементарные ячейки, из которых состоит преобразователь достаточно хорошо изучены и просты в технической реализации, поскольку их основой являются стандартные низковольтные электронные ключевые элементы. Несомненным преимуществом такого каскадного электрического преобразователя является возможность достижения высоких показателей модулированного напряжения на его выходе, что обеспечивает снижение уровня пульсаций момента приводного электродвигателя. При этом увеличение мощности таких преобразователей происходит путем увеличения его выходного напряжения при неизменной величине тока.
Заключение
Проведенные испытания позволили выполнить верификацию теоретических исследований и разработанной методики проектирования РЭМАМПР, а также показали их адекватность. Результаты выполненных исследований продемонстрировали перспективность и широкие возможности гребного электропривода на основе РЭМАМПР. Произведено сравнение изготовленных и испытанных опытных образцов РЭМАМПР и электроприводов на их основе с существующими электроприводами на базе наиболее распространенных вариантов электрических машин [11–13]. Сравнение осуществлялось по целому ряду критериев и показателей: энергетических, массогабаритных, конструктивных, надежности, функциональным, в частности, возможности управления намагниченностью магнитопровода и работы во второй зоне механической характеристики, стоимости, технологичности изготовления.
Анализ показал, что при прочих равных условиях электропривод на основе РЭМАМПР превосходит по целому ряду показателей наиболее распространенный асинхронный электропривод. При этом РЭМАМПР по сравнению с асинхронным электродвигателем, при соответствующих алгоритмах управления, позволяет получить более предпочтительные энергетические характеристики, что в особенности актуально для автономных электроэнергетических систем большой мощности, которые составляют основу судов ледового класса. Наряду с асинхронными машинами к достоинствам РЭМАМПР Ф.А. Гельвер, И.В. Белоусов, В.Ф. Самосейко, А.В. Саушев ГРЕБНОЙ ЭЛЕКТРОПРИВОД НА ОСНОВЕ РЕАКТИВНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ДЛЯ СУДОВ ЛЕДОВОГО КЛАССА также следует отнести простоту его конструктивного исполнения, высокую надежность. Важным преимуществом этой машины является отсутствие обмотки на роторе и, как следствие, электрических потерь. Это обстоятельство имеет особое значение при росте установленной мощности судна, поскольку потери энергии в мощных гребных электрических машинах могут достигать больших значений.
Авторами данной статьи накоплен достаточно большой опыт исследования, разработки и проектирования, а также управления гребными электродвигателями на основе РЭМАМПР. Разработанные системы управления построены на отечественной элементной базе. Технология их изготовления обеспечивает высокую вероятность их безотказной работы. Программное обеспечение является оригинальным и выполнено на отечественных программных продуктах. Высокие показатели надежности гребного электропривода на основе РЭМАМПР, робастные алгоритмы управления, позволяющие сохранять работоспособное состояние систем управления в сложных условиях эксплуатации, позволяют рекомендовать полученные результаты к внедрению на судах ледового класса.
Список литературы Гребной электропривод на основе реактивной электрической машины для судов ледового класса
- Дьякова А.А., Дьяков О.Д. Северный морской путь: перспективы морских инноваций // Молодой ученый. 2018. № 44. С. 235-239.
- Кашка М. М., Смирнов А. А., Головинский С. А., Воробьев В. М., Рыжков А. В., Бабич Е. М. Перспективы развития атомного ледокольного флота // Арктика: экология и экономика. 2016. № 3 (23). С. 98-107.
- Вершинин В.И., Махонин С.В., Паршиков В.А., Хомяк В.А. Создание систем электродвижения для судов различного назначения // Труды Крыловского государственного научного центра. 2019. Т. 1. № 387. С. 5-16.
- Птах Г.К. Сравнительная оценка электрических двигателей переменного тока асинхронного и синхронного типов с целью применения их в гребных электроустановках ледоколов большой мощности // Известия высших учебных заведений // Электромеханика. 2019. Т. 62. № 5. С. 24-30.
- Вершинин В.И., Махонин С.В., Паршиков В.А., Хомяк В.А. Особенности построения системы управления гребными электроприводами универсальных атомных ледоколов нового поколения // Труды Крыловского научного центра. 2018. Т. 2. № 384. С. 61-69.
- Gelver F.A., Belousov I.V., Samoseiko V.F., Saushev A.V. Practice and Prospects for Implementing an Electric Drive Based on a Reluctance Machine with Magnetically Anisotropic Conductive Rotor // 2021 International Ural Conference on Electrical Power Engineering (UralCon). 2021. C. 424-428. DOI: 10.1109/UralCon52005.2021.9559476
- Самосейко В.Ф., Гельвер Ф.А., Хомяк В.А., Хайров Д.А. Синхронные электрические машины с анизотропной магнитной проводимостью ротора. Методика проектирования. Алгоритмы управления. СПб.: Изд-во Крыловского гос. науч. центра. 2016. 174 с.
- Пронин М.В., Воронцов А.Г. Силовые полностью управляемые полупроводниковые преобразователи (моделирование и расчет). СПб.: Электросила. 2003. 172 с.
- Михеев К.Е., Томасов В.С. Анализ энергетических показателей многоуровневых полупроводниковых преобразователей систем электропривода // Научно-технический вестник информационных технологий, механики и оптики. 2012. № 1 (77). C. 46-52.
- Бурдасов Б.К., Нестеров С.А., Федотов Ю.Б. Многоуровневые и каскадные преобразователи частоты для высоковольтных электроприводов переменного тока // Электронный научный журнал «Apriori. Cерия: естественные и технические науки». 2015. № 5. С. 1-15.
- Калинин И.М., Николаев М.А., Третьяк М.В., Опарин А.Н. Компьютерное моделирование судовой электроэнергетической системы с вентильно-индукторным гребным электроприводом // Труды Крыловского научного центра. 2020. Т. 3. № 393. С. 54-67.
- Птах Г.К. Отечественный опыт разработки, внедрения и эксплуатации, перспективы и области применения вентильных индукторных реактивных электродвигателей большой мощности // Изв. вузов. Электромеханика. 2024. Т. 67. № 1. С. 6-20. DOI: 10.17213/0136-3360-2024-1-6-20
- Захаров А.В. Перспективы технического применения синхронных электродвигателей с анизотропной магнитной проводимостью ротора // Состояние и перспективы развития электро-технологии (XVIII Бернадосовские чтения): тез. докл. междунар. науч.-техн. конф. Иваново. 2015. С. 124-127.
