Грузовые корабли "Прогресс" в программах орбитальных станций (к 40-летию первого в мире полета грузового корабля к орбитальной станции)
")
Автор: Беляев Михаил Юрьевич, Карасев Дмитрий Вячеславович, Матвеева Татьяна Владимировна, Рулев Дмитрий Николаевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Инновационные технологии в аэрокосмической деятельности
Статья в выпуске: 1 (20), 2018 года.
Бесплатный доступ
Полеты орбитальных станций первого поколения показали, что для обеспечения их длительного эффективного функционирования на орбите необходима регулярная доставка топлива для двигательной установки, расходуемых материалов и пищи для поддержания жизнедеятельности экипажа, запасных частей для служебных бортовых систем, нового целевого оборудования и т. д. Для решения этих задач в 1973 г. РКК «Энергия» начала разработку нового транспортного грузового корабля (ТГК) на базе уже испытанного пилотируемого корабля «Союз», и к концу 1977 г. был готов первый летный образец. Запуск корабля «Прогресс-1» состоялся сорок лет назад - 20 января 1978 г., а 22 января 1978 г. была выполнена автоматическая стыковка ТГК к орбитальной станции «Салют-6», положившая начало многолетней успешной эксплуатации первого в мире грузового корабля. К настоящему моменту все штатно выведенные на орбиту корабли «Прогресс» были состыкованы с орбитальными станциями, выполнив программу доставки грузов. Успешной эксплуатации ТГК «Прогресс» способствовали разработанные методы управления их полетами, которые позволили надежно решать задачи выполнения транспортных операций даже при возникновении нештатных ситуаций...
Транспортный грузовой корабль "прогресс", орбитальная станция, программа полета, методы управления, технологии проведения экспериментов
Короткий адрес: https://sciup.org/143166657
IDR: 143166657 | УДК: 629.78-047.74:629.784
Progress cargo vehicles in orbital-station programs(dedicated to the 40th anniversary of the world's first cargo vehicle space flight to an orbital station)
The missions of the first-generation orbital stations have demonstrated that their long-term efficient operation in orbit required regular deliveries of such items as propellant for the propulsion system, consumables and food for the crew, spares for the onboard systems, new hardware for station utilization, etc. In 1973, to achieve these objectives, RSC Energia began to develop a new cargo spacecraft based on the proven design of the Soyuz manned transport vehicle, and the first flight prototype was ready by the end of 1977. The launch of the Progress-1 took place forty years ago on January 20, 1978, and on January 22, 1978, the cargo vehicle docked to the Salyut-6 orbital station thus marking the beginning of many years of successful operation of the Progress cargo transport vehicles (CTV). All Progress vehicles successfully inserted into orbit had docked to the orbital stations and completed their cargo delivery mission. The success of the Progress missions was supported by mission control methodologies developed for these vehicles and enabled reliable performance of transportation tasks even in contingency situations...
Текст научной статьи Грузовые корабли "Прогресс" в программах орбитальных станций (к 40-летию первого в мире полета грузового корабля к орбитальной станции)
беляев м.ю.
караСев д.в.

матвеева т.в.
рулев д.н.
успешные полеты транспортных кораблей — основа обеспечения длительной эксплуатации орбитальных станций
Российские транспортные грузовые корабли (ТГК) «Прогресс» (рис. 1) успешно работают по программам различных орбитальных станций (ОС), начиная с января 1978 г. Основными задачами ТГК, обеспечивающими возможность длительной эксплуатации ОС, являются:
-
• дозаправка станции топливом;
-
• доставка расходуемых материалов для обеспечения жизнедеятельности экипажа (воды, газов, питания и др.);
-
• дооснащение станции техническим и научным оборудованием;
-
• поддержание ориентации станции и выполнение коррекций орбиты;
-
• удаление отходов со станции [1–6].
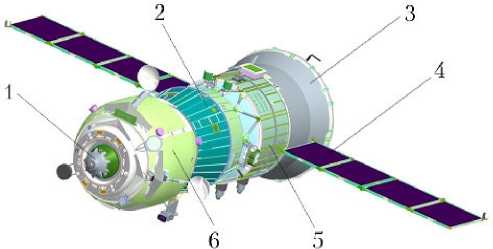
Рис. 1. Транспортный грузовой корабль «Прогресс»: 1 — стыковочный узел; 2 — отсек компонентов дозаправки; 3 — агрегатный отсек; 4 — солнечные батареи; 5 — приборный отсек; 6 — грузовой отсек
ТГК «Прогресс» создавался на базе пилотируемого корабля «Союз». Это позволило использовать аппаратуру и технологии, отработанные в проектах кораблей «Союз», а также использовать для его запуска такую же ракету-носитель. С 1973 по 1977 гг. были выполнены все необходимые проектные, конструкторские работы, и в ноябре 1977 г. был изготовлен и отработан первый летный образец нового корабля «Прогресс». Сорок лет назад, 20 января 1978 г., впервые в истории мировой космонавтики состоялся запуск грузового корабля, а через двое суток — его автоматическая стыковка к ОС. Впервые с помощью грузового корабля «Прогресс» было осуществлено снабжение ОС «Салют-6» дополнительным оборудованием и расходуемыми материалами. Находясь в составе станции, ТГК «Прогресс-1» выступил в роли первого космического буксира. 5 февраля 1978 г. была проведена коррекция орбиты станции «Салют-6» с помощью двигательной установки грузового корабля. После укладки в ТГК «Прогресс-1» удаляемых со станции отходов 6 февраля 1978 г. состоялась расстыковка корабля и станции, и 8 февраля был осуществлен его сход с орбиты над акваторией Тихого океана [1].
Создание и ввод в эксплуатацию надежных транспортных систем позволили осуществлять длительные полеты орбитальных станций. В период 1978…1990 гг. для обеспечения полетов ОС «Салют-6»,
«Салют-7» и «Мир» были изготовлены и выведены на орбиту 43 ТГК «Прогресс» [1]. Все они были успешно состыкованы с ОС в автоматическом режиме.
В процессе выполнения программ ОС осуществлялась модернизация пилотируемых кораблей «Союз» и, соответственно, кораблей «Прогресс». Вслед за созданием кораблей «Союз ТМ» в 1989 г. появились модифицированные грузовые корабли, получившие название «Прогресс М» (первый ТГК новой серии стартовал 23 августа и пристыковался к ОС «Мир» 25 августа 1989 г.) [1]. Все 67 кораблей серии «Прогресс М» и 11 кораблей серии «Прогресс М1» с увеличенным запасом топлива в системе дозаправки также успешно выполнили свои программы по доставке грузов на ОС [2].
Модернизация ТГК продолжается и в настоящее время. Теперь они служат базой для завершения отработки новых систем и технологий перед их вводом на транспортные пилотируемые корабли «Союз». Так было с кораблями серии «Прогресс М-М» и серии «Прогресс МС» [3]. Кроме того, на КА типа кораблей «Прогресс» были выведены в космос модули СО1 («Прогресс М-СО1» в 2001 г.) и МИМ2 («Прогресс М-МИМ2» в 2009 г.) и пристыкованы к МКС [2].
За 40 лет использования кораблей «Прогресс» для обеспечения полетов ОС было успешно выведено на орбиту 154 ТГК «Прогресс» разных модификаций, все они были состыкованы и обеспечили выполнение программы длительного полета ОС.
Для обеспечения управления полетом ТГК «Прогресс» в новых условиях, в т. ч. с учетом доработок корабля при его модернизациях, требовалась разработка специальных методов и методик планирования, автоматизации для реализации их полетов [7]. Такая работа проводилась для каждой новой серии ТГК «Прогресс». Так, при переходе к серии ТГК «Прогресс МС», в связи с вводом бортовой единой команднотелеметрической системы и соответствующих средств управления наземного контура (командно-измерительные станции «Клен»), были заново разработаны комплекс автоматизации командно-программного управления, методическое обеспечение планирования и реализации сеансов связи, изменена организация работы групп управления ТГК и т. д. Все это способствовало длительной успешной эксплуатации отечественных транспортных систем.
Как правило, после выполнения основных задач в составе станции ТГК нередко обладают запасом нерастраченных ресурсов основных систем, что позволяет им совершать после отстыковки от ОС автономный полет до одного месяца или даже в течение более длительного времени. Целесообразно по возможности использовать эти ресурсы для решения исследовательских задач на участке автономного полета после расстыковки от станции [8, 9].
использование грузовых кораблей «Прогресс» для проведения экспериментов
В программы полета ТГК «Прогресс» с первых их пусков включались эксперименты и исследования по научным программам. Так, уже на корабле «Прогресс-1» в 1978 г. проводились технический эксперимент по проверке новых принципов измерения параметров относительного движения с использованием источника направленного рентгеновского излучения на станции «Салют-6» и приемников на ТГК (аппаратура АРС-2) и эксперимент по отработке аппаратуры ионной ориентации. При этом полет каждого ТГК «Прогресс» вносил весомый вклад в реализацию программ научных и прикладных исследований и экспериментов независимо от того, проводились на нем эксперименты или нет, поскольку на этих кораблях доставлялись на борт ОС научное оборудование и расходуемые при выполнении экспериментов материалы. Крупным проектом с использованием ТГК «Прогресс-7» для доставки научного оборудования на ОС «Салют-6» был, например, эксперимент с радиотелескопом КРТ-10, выполненный в 1979 г. [10].
В то же время многие корабли «Прогресс» и сами являлись платформами для проведения исследований. За время эксплуатации на них выполнено большое количество разнообразных экспериментов:
-
• наблюдение земной поверхности (радиолокационная система бокового обзора с синтезированной апертурой на ТГК «Прогресс-17» в 1983 г. и на ТГК «Прогресс-22» в 1984 г.);
-
• отработка новых технологий и аппаратуры;
-
• создание искусственных космических образований (эксперимент «Арча-2» на ТГК «Прогресс-27» в 1987 г. и эксперимент «Болид» на ТГК «Прогресс М-12» в 1992 г.);
-
• запуск на орбиту малых спутников;
-
• раскрытие крупногабаритных конструкций и т. д.
Крупным проектом, выполненным на ТГК «Прогресс М-15» четверть века назад, 4 февраля 1993 г., был эксперимент «Знамя-2» [1]. В этом эксперименте проводилась отработка технологии развертывания больших пленочных конструкций на ТГК «Прогресс» (рис. 2).
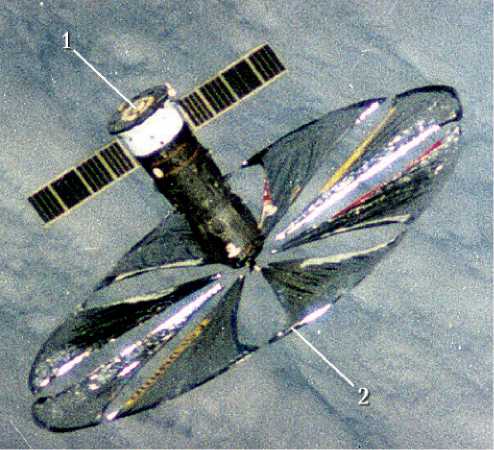
Рис. 2. Проведение космического эксперимента «Знамя-2» 04.02.1993 г.: 1 — ТГК «Прогресс М-15»; 2 — развернутая пленочная конструкция
Такие конструкции могут быть использованы в качестве «солнечного паруса», отражателя солнечного света для подсветки определенных районов Земли и т. п. Технология развертывания пленочной конструкции основывалась на закрутке ТГК «Прогресс» вокруг продольной оси после его отделения от станции. С экспериментом «Знамя» связан и один из первых опытов рекламной деятельности на орбите. На развернутой в эксперименте конструкции предварительно был изображен фирменный знак ладьи Волжского автомобильного завода (ВАЗ). Космонавты с борта станции «Мир» снимали на видеокамеру процесс развертывания пленочной конструкции и полет ТГК «Прогресс». Видеокассета с изображением этого процесса и фирменной ладьи была передана затем руководству ВАЗ.
Целесообразность использования ТГК «Прогресс» для выполнения космических экспериментов (КЭ) в программе МКС существенно возросла. В силу международного характера проекта МКС и большого количества его участников, многие организационные вопросы проведения экспериментов на этой станции решаются более сложно, чем при их выполнении в автономном полете национальных космических аппаратов.
Научные исследования на Российском сегменте (РС) МКС выполняются в шести направлениях [3]:
-
• исследование Земли и космоса;
-
• технологии освоения космического пространства;
-
• физико-химические процессы и материалы в условиях космоса;
-
• космическая биология и биотехнология;
-
• человек в космосе;
-
• образование и популяризация космических исследований.
Эффективное выполнение многих экспериментов из первых трех направлений возможно с помощью ТГК «Прогресс». Реализация этих возможностей потребовала разработки специальных методов и технологий проведения исследований в автономном полете ТГК.
Рассмотрим основные технологии использования ТГК «Прогресс», предложенные для проведения экспериментов в его автономном полете.
новые технологии проведения экспериментов на тгк «Прогресс»
Использование транспортного грузового корабля при наблюдении земной поверхности. После отстыковки от станции в процессе автономного полета ТГК могут проводиться как наблюдения исследуемых наземных объектов аппаратурой, размещенной на корабле, так и наблюдения непосредственно самого ТГК аппаратурой, размещенной на Земле. В обоих случаях требуется обеспечить прохождение ТГК над заданными наземными точками/объектами при выполнении заданных условий (ограничений):
-
• на моменты времени наблюдений;
-
• на удаленность ТГК от задаваемых наземных точек в моменты наблюдений;
-
• на светотеневую обстановку на орбите и в задаваемых наземных точках в моменты наблюдений и т. д.
Также необходимо учитывать ограничения на процесс управления ТГК:
-
• наличие зон связи;
-
• обеспечение энергоприхода;
-
• наличие запаса топлива и т. д.
При этом объем получаемой полезной информации зависит от количества выполненных наблюдений [10, 11].
Повышение объема и качества полезной информации может быть получено путем выполнения в полете маневров ТГК, при которых обеспечивается его прохождение над наибольшим количеством заданных наземных объектов [12]. Кроме того, понижение высоты орбиты КА увеличивает реализуемое при наблюдениях разрешение. Таким образом, требуется выбрать такую орбиту спуска, при которой достигается максимальное количество прохождений ТГК над заданными наземными объектами при выполнении заданных требований и ограничений.
Формализация задачи осуществляется следующим образом. Рассматриваем движение КА по круговой орбите с постоянным наклонением к экватору i , прецессирующей под влиянием сжатия Земли. Положение плоскости орбиты КА задаем наклонением орбиты и долготой восходящего узла, а положение КА в плоскости орбиты — радиусом орбиты R и аргументом широты u , измеряемым в оборотах: 0 < u < 1; u = u */360°, где u * — аргумент широты, измеряемый в градусах [13]. Называем межвитковым расстоянием d модуль изменения долготы восходящего узла за виток в связанной с Землей гринвичской системе координат (ГСК):
d = ю З T - AQ; T = 2n R 3/2 ц -1 / 2 ;
AQ = 3п 1 2 ( R э / R ) 2 cos i .
Здесь ю З — угловая скорость вращения Земли; T — период обращения КА; ц — гравитационный параметр; AQ — изменение долготы восходящего узла за виток в абсолютной системе координат; I 2 = –1 082,2·10 –6 — коэффициент при второй зональной гармонике в разложении гравитационного потенциала Земли; R э — экваториальный радиус Земли [6].
Используем нумерацию витков орбиты КА, начиная с нулевого витка, и в качестве аргумента при описании движения КА будем использовать дробное значение витка — сумму номера витка и аргумента широты. Полагаем, что на рассматриваемом этапе полета допустимо провести K одноимпульсных маневров. Обозначаем kj — номер витка на момент выполнения j-го маневра; dj и dj+1 — межвитковое расстояние до и после j-го маневра. На момент времени, соответствующий номеру витка n и аргументу широты u (0 ≤ u < 1), долгота восходящего узла в ГСК записывается выражением l-1
f 0 - l k j ( d j - d j + 1 ) - d l ( n + u );
-
{ 1, при ( n + u ) C k 1 ;
-
2, ..., K , при kt _ 1 C ( n + u ) C k; ;
K + 1, при kK C (n + u), где f0 — долгота восходящего узла нулевого витка в ГСК.
Пусть задано N наземных объектов с географическими координатами центров (X s , ф s ), 5 = 1, ..., N . Считаем, что КА проходит над наземным объектом, если трасса КА на поверхности Земли проходит от объекта на расстоянии, не превышающем заданную величину р 5 .
Для каждого объекта Qs , заданного кругом на земной поверхности с центром в (X 5 , ф 5 ) и радиусом р 5 , рассчитываем диапазоны долгот восходящих узлов в ГСК L f - q , f + q J ( q = 1, 2), при которых плоскость орбиты КА проходит через данный круг, и соответствующие им диапазоны значений аргументов широты L u - 5 q , u + 5 q J ( q = 1, 2), при которых КА может находиться над данным кругом (соотношения для сферической формы Земли):
j-sl = Х5 - /г; = Xs + .£>-- л;
( sin(p /R,V
В = arcsin ctg г tg ф ±------—— ;
5 sin z cos ф. v
^A~ 2к
2л
$т(ф5± Ps/^3)
arcsin
sinz
Индексы q = 1, 2 соответствуют движению КА из южного полушария в северное и наоборот («восходящая» и «нисходящая» ветви орбиты). На рис. 3 представлена схема определения указанных положений плоскости орбиты, проходящих через наземные объекты, в гринвичской системе координат Oxyz.
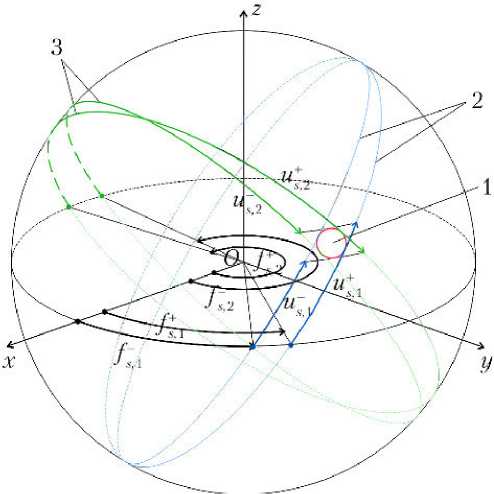
Рис. 3. Схема определения положений плоскости орбиты, проходящих через объект Qs: 1 — круг на земной поверхности с центром в ( X 5, ф 5) и радиусом р s; 2, 3 — крайние положения плоскости орбиты при прохождении через объект Qs на «восходящей» и «нисходящей» ветвях орбиты, соответственно
Для каждого объекта Qs может быть задан его приоритет Ps (пропорциональный ценности прохождения КА над объектом). Требование прохождения КА над количеством объектов не менее заданного числа N 0 при информативности наблюдений не менее задаваемой величины P 0 формализуется условиями
∓
f ± s, q
^^^^^^^»
l -1
f -L k (d - d-^ J - d(n + u" ) + 2nm 0 j j j +1 l s s, q j = i
s
< M 1 ( x s, I + a s, q + z s )
( q = 1, 2; l = 1, ^, K + 1);
k - 1 - ns - u-s, 1 < Mvxs, l + a s,q + zs )
( q = 1, 2; l = 2, …, K +1);
n + u+ – k ≤ M ( x + α + z ) ( q = 1, 2; l = 1, …, K );
s s, q l 3 s, l s, q s
K +1
ns , ms — целые; ys , zs , xs , l = (0/1) ( l = 1, …, K +1); l ∑ – 1 xs, l ≤ K,
взятыми для s = 1, …, N , и условиями
NN ∑ z ≤ N – N ; ∑ s = 1 s 0 s = 1
N
Pszs ≤ ∑ Ps – P . s = 1
В условиях (1) обозначено a sq = { ys | q = 1; 1 – ys| q = 2}. Здесь и далее в , еличины Mi рассчитываются как максимальные значения, которые могут принимать левые части соответствующих неравенств.
Использование величин Mi позволяет обеспечить выполнение данных неравенств при ненулевых значениях входящих в их правые части бинарных неизвестных.
Бинарные неизвестные zs , ys , xs, l имеют следующий смысл:
z s
ys =
0 — КА проходит над объектом Qs ;
1 — в противном случае.
0 — КА проходит над Qs на «восходящей» ветви орбиты ( q = 1);
1 — КА проходит над Qs на «нисходящей» ветви орбиты ( q = 2).
x s, l
0 — КА проходит над Qs маневра ( l = 1), между
= ( l – 1) и l ( l = 2, …, K ) маневра K ( l = K + 1);
-
1 — в противном случае.
до первого маневрами или после
Условие прохождения КА над объектом Qs в пределах заданных диапазонов витков L n j v , n + v J (v = 1, ..., N s ) ) записывается в виде
±( n s - n t v ) ^ M g , ; ; g s v =(0/1);
N s (3)
(v = 1, .... N , ); Z g , , - N s - 1.
ν = 1
Бинарные неизвестные g , v имеют следующий смысл:
{ 0 — КА проходит над Q , в v-ом диапазоне витков;
1 — в противном случае.
К ограничениям данного вида могут быть сведены условия по светотеневой обстановке в моменты выполнения наблюдений.
Условие последовательного выполнения маневров представляется в виде kj ≤ kj+1 ( j = 1, …, K – 1). (4)
Для орбиты спуска требуется обеспечить итоговое понижение высоты орбиты КА, что соответствует уменьшению межвит-кового расстояния. В этом случае ограничения на затраты ресурсов соответствуют ограничениям на значения межвитковых расстояний d–j ≤ dj ≤ d+j ( j = 1, …, K + 1); (5)
A d - < ( j - d ) < A d + A d + < 0 (j = 1, _, K ), (6) где L d - , d + J — диапазон допустимых значений d j ; L A d - , A d + J — диапазон допустимых изменений межвиткового расстояния при выполнении j -го маневра, определяющийся техническими возможностями и ресурсами КА.
Таким образом, задача максимизации информативности наблюдений может быть формализована следующим образом: макси-
N мизировать целевую функцию F - Z Pzs s = 1
при условиях (1)–(3) для s = 1, …, N (4)–(6).
Особенности сформулированной задачи обусловлены требованием целочисленности переменных и нелинейностью функций условий. Задача решается с использованием линейной аппроксимации нелинейных функций. Полученные линеаризованные задачи являются частично-целочисленными задачами линейного программирования, которые могут быть решены, например, методом ветвей и границ [14–16]. Расчет схем выполнения полученных маневров КА может базироваться на известных методах расчета маневров и коррекций орбит КА [17, 18].
Изучение верхних слоев атмосферы с помощью тросовой системы на базе ТГК «Прогресс». ТГК «Прогресс» могут использоваться также для изучения верхних слоев атмосферы Земли. Изучение верхних слоев атмосферы является сложной научно-технической задачей, прежде всего, в энергетическом отношении, так как поддержание полета в верхних слоях атмосферы требует значительных энергетических затрат. Использование ТГК «Прогресс» позволяет добиться значительного снижения энергозатрат или даже провести исследования на высотах, недостижимых для полета спутника. С этой целью на ТГК «Прогресс» размещается атмосферный зонд, снабженный специальной научной аппаратурой, а также устройство выталкивания зонда и трос, обеспечивающий соединение зонда с ТГК.
После доставки на станцию непосредственно перед началом эксперимента экипаж переводит оборудование эксперимента в рабочее положение, не выходя в открытый космос. Эксперимент начинается после отстыковки корабля от станции и перевода его на низкую орбиту (высота ~180...200 км). Капсула выталкивается пружинными толкателями и отходит от корабля, сначала вытягивая за собой из безынерционной катушки начальный участок троса с небольшим сопротивлением. Затем начинается регулируемый выпуск основной части троса. По окончании развертывания тросовая система должна занять на орбите положение, близкое к устойчивому вертикальному, с некоторыми остаточными маятниковыми и продольными колебаниями допустимой амплитуды. Развернутая тросовая система будет совершать орбитальный полет, постепенно снижая свою орбиту под действием сопротивления атмосферы. Причем желательно, чтобы зонд летел как можно дольше на самой меньшей высоте. Будут исследоваться темп снижения орбиты, маятниковые, поперечные и продольные колебания троса, взаимодействие капсулы с набегающим потоком воздуха и другие физические явления. На высоте около 165–170 км тросовая система будет разделена отрезанием троса от корабля, после чего корабль будет затоплен в заданном районе океана.
Капсула снабжается специальными аэродинамическими стабилизаторами. Стабилизаторы обеспечивают устойчивость капсулы и создают составляющую силы, направленную в сторону Земли, что обеспечивает надежное развертывание троса. Контроль развертывания троса и полета капсулы осуществляется с помощью существующих навигационных средств. В качестве научной аппаратуры в капсуле размещаются масс-спектрометр, зонд Ленгмюра и другое оборудование.
В предлагаемом КЭ в качестве троса впервые будет использоваться кабель-трос, на который возлагается функция обмена информацией между компонентами тросового модуля, установленными на ТГК, и капсулой [19]. В качестве среды для передачи информации предполагается использовать оптическое волокно, как обеспечивающее наибольшую защиту передаваемой информации от внешних электромагнитных полей. Данная схема реализуется в настоящее время в программе РС МКС в КЭ «Изгиб» и позволит выполнить длительное изучение верхних слоев атмосферы за счет естественного снижения ТГК без использования энергетических затрат на поддержание полета в верхних слоях атмосферы [20].
Изучение пылевой плазмы с помощью распыления микрочастиц вблизи ТГК. В ряде экспериментов осуществляется изучение пылевой плазмы, создаваемой с помощью распыления микрочастиц [1]. С этой целью графитовые микрочастицы размещаются в специальных контейнерах, которые отстреливаются от ТГК, и на определенном расстоянии от ТГК из них распыляются микрочастицы. Для изучения возникающей пылевой плазмы необходимо удержание графитового облака вблизи ТГК. ТГК и графитовые частицы подвержены влиянию сопротивления атмосферы. Вследствие различия баллистических коэффициентов ТГК и частиц под действием сопротивления атмосферы они начинают расходиться вдоль орбиты. Удержание графитового облака в течение необходимого для его изучения времени обеспечивается значением плотности атмосферы на высоте полета ТГК. Для текущих значений солнечной и геомагнитной активности значение плотности атмосферы определяется высотой орбиты. Следовательно, необходимая для изучения пылевого облака продолжительность времени может быть обеспечена выбором высоты орбиты ТГК.
Отработка, тестирование в полете различной аппаратуры, методов и систем. ТГК «Прогресс» являются удобными аппаратами для отработки новых приборов и технологий. Их использование для этих целей началось еще в период выполнения научных программ исследований на орбитальных станциях «Салют», «Мир» и продолжается в настоящее время.
Помимо научных задач, на ТГК «Прогресс» проводится отработка технологий и систем перед применением их в пилотируемых полетах. Так, в ходе модернизации кораблей серии «Союз МС» на ТГК «Прогресс» были предварительно отработаны новые системы сближения, спутниковой навигации и др. Перед переходом корабля «Союз» на сближение по четырехвитковой схеме эта схема поэтапно была проверена на нескольких кораблях «Прогресс».
В настоящее время актуальной задачей является, например, отработка методов и систем сближения и стыковки на орбите с некооперируемыми объектами. Актуальность данной задачи обусловлена большим количеством КА на орбитах искусственных спутников Земли (особенно на геостационарной орбите) и необходимостью увода с этих орбит КА, отслуживших срок функционирования или вышедших из строя.
Для решения этой задачи необходимо создать средства и методы сближения с некооперируемыми объектами, а также робототехнические устройства для захвата этих объектов [21]. Роботы, которые могут быть использованы для выполнения таких работ, создаются в различных зарубежных фирмах, например, в институте робототехники и мехатроники IRM германского аэрокосмического центра DLR в рамках миссии DEOS (Deutsche Orbitale Servicing Mission) по техническому обслуживанию, ремонту и контролируемому возврату неисправных спутников .
Отработка создаваемых роботов сдерживается высокой стоимостью реализации проектов (главным образом, стоимостью создания и запуска двух вспомогательных КА). Использование ТГК «Прогресс» после выполнения ими своей основной задачи с МКС позволит существенно сократить стоимость реализации проекта по отработке взаимодействия на орбите с не-кооперируемыми объектами.
При использовании такого подхода робот доставляется к МКС на ТГК «Прогресс» и монтируется на его внешней поверхности космонавтами после стыковки ТГК и МКС во время выхода космонавтов в открытый космос. В период нахождения ТГК в составе МКС робот может отрабатываться в космических условиях в течение нескольких месяцев. При этом он может захватывать объекты, размещаемые в его рабочей зоне на гибкой штанге. В случае возникновения нештатных ситуаций космонавты имеют возможность выполнить ремонт робота.
После отстыковки ТГК возможно отделение от него спутника, который будет захватываться роботом. В качестве спутника может использоваться капсула, отделение которой от ТГК уже отработано ранее. Возможна также другая схема, в рамках которой от МКС с некоторым перерывом будут отстыкованы два ТГК «Прогресс», и один из них, оснащенный роботом, будет захватывать спутник из второго ТГК. В настоящее время прорабатывается проект отработки робота на ТГК «Прогресс» и МКС. При необходимости возможна повторная стыковка ТГК «Прогресс» со станцией для осмотра и возвращения робототехнического устройства на станцию. На основе отработанных с помощью ТГК «Прогресс» и пилотируемых станций технологий и робототехнических систем могут создаваться специальные КА для «очистки» геостационарной орбиты от вышедших из строя КА.
Запуск спутников после расстыковки и отхода ТГК от МКС. Запуск многих КА экономически целесообразен в случае минимизации затрат, связанных с их выведением. Весьма привлекательным в этих случаях является использование ресурсов грузовых кораблей для запуска подобных КА.
За время эксплуатации транспортных кораблей «Прогресс М» были успешно проведены работы по запуску научных микроспутников «Колибри» и «Чибис-М». Запуск спутников был осуществлен из специальных транспортно-пусковых контейнеров (ТПК) (рис. 4). После стыковки с МКС экипаж переводил контейнеры из транспортировочного положения в рабочее, устанавливая его в просвете люка грузового отсека. Перед расстыковкой грузовой отсек корабля был разгерметизирован.
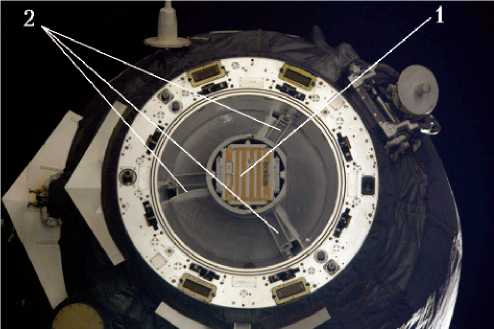
Рис. 4. Транспортно-пусковой контейнер (ТПК) со спутником «Чибис-М» на ТГК «Прогресс М-13М»: 1 — ТПК со спутником; 2 — узлы фиксации ТПК
В развитие данного направления в настоящее время прорабатывается возможность создания платформы для выведения большого спектра универсальных малых КА в унифицированных ТПК на ТГК «Прогресс». Такая схема позволяет разместить контейнеры на внешней поверхности корабля и не задействовать экипаж для их подготовки к запуску. Кроме того, в данных контейнерах при необходимости можно выводить малые КА разных размерностей. На рис. 5 показано размещение таких ТПК на ТГК «Прогресс».
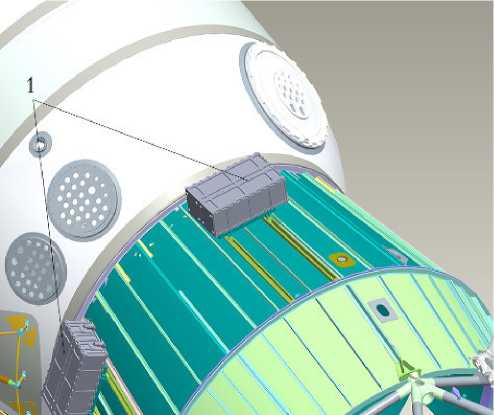
Рис. 5. Размещение универсальных контейнеров с малыми КА (1) на корпусе отсека компонентов дозаправки ТГК «Прогресс»
При запуске ряда спутников целесообразно после расстыковки переводить ТГК на более высокую орбиту. В этих случаях спутник отделяется от грузового корабля и начинает самостоятельный полет по орбите после отстыковки и перевода ТГК на более высокую орбиту [22].
В некоторых случаях габаритные размеры спутника могут оказаться слишком большими, и он не поместится в пусковом контейнере. Кроме того, спутник может иметь раскрываемые элементы конструкции, перевод которых в рабочее положение лучше выполнять под контролем операторов. В подобных случаях предлагается следующая технология выведения спутника. Спутник и его раскрывающиеся элементы (антенны, панели солнечных элементов и т. п.) в сложенном состоянии размещаются внутри ТГК. После стыковки ТГК к МКС спутник и его внешние элементы переносятся на борт станции и во время выхода в открытый космос монтируются космонавтами на корпусе ТГК. Затем осуществляется перевод раскрывающихся элементов конструкции спутника в рабочее положение (космонавтами или под их контролем по командам со станции). При возникновении нештатных ситуаций космонавты имеют возможность выполнить ремонтные работы. После контроля раскрытия элементов конструкции спутника и проведения тестов ТГК со спутником переводится на заданную орбиту, спутник отделяется от ТГК, после чего ТГК сходит с орбиты [23].
Данная технология может быть применена, например, для выведения на орбиту спутника с научной аппаратурой (НА) ICARUS [24], которая позволяет контролировать перемещения животных и птиц на земной поверхности [25, 26]. Для этого на животных устанавливаются миниатюрные датчики (теги) массой 5 г, содержащие приемник GPS /ГЛОНАСС, аккумуляторную батарею, солнечные элементы, приемник и передатчик для связи с КА, датчики температуры и ускорения [24]. Доставка части НА ICARUS с помощью ТГК «Прогресс МС-07» для установки внутри РС МКС выполнена 16.10.2017 г. Оборудование, размещаемое космонавтами на внешней поверхности РС МКС, планируется доставить на станцию в 2018 г. В соответствии с соглашением между Роскосмосом и DLR после отработки НА на МКС предусматривается также установка подобной аппаратуры на спутнике.
Такой спутник может быть запущен, например, с помощью ТГК «Прогресс» по описанной технологии.
Эксперименты в области микрогравитации на борту ТГК. Одно из направлений использования ТГК «Прогресс» в автономном полете связано с выполнением экспериментов в области микрогравитации [8]. Это направление развивается в рамках технического эксперимента «Изгиб».
Микрогравитационная обстановка на борту РС МКС не является благоприятной для проведения таких экспериментов. Это связано с тем, что центр масс МКС находится на Американском сегменте, а многие бортовые системы, создающие микроперегрузки, размещены на РС МКС. Для проведения экспериментов в области микрогравитации было предложено использовать ТГК «Прогресс» после выполнения им своих основных функций. Перед расстыковкой со станцией на ТГК «Прогресс» может быть размещено оборудование для проведения экспериментов. После выполнения экспериментов осуществляется повторная стыковка ТГК с МКС, и это оборудование возвращается на станцию. Поскольку на ТГК отсутствуют экипаж и бортовые системы жизнеобеспечения, микроперегрузки на нем оказываются значительно ниже, чем на РС МКС. Особенно благоприятными для выполнения КЭ в области микрогравитации оказываются пассивные режимы ориентации ТГК [27].
Несколько режимов неуправляемого полета были исследованы на ТГК «Прогресс М1-11» в мае–июне 2004 г. и ТГК «Прогресс-51» в феврале–марте 2005 г. Была поставлена задача найти устойчивый режим, обеспечивающий в течение нескольких суток малый уровень остаточных микроускорений. Наиболее перспективным в этом отношении оказался режим гравитационной ориентации ТГК [28–32].
В 2011–2013 гг. на ТГК «Прогресс М-11М», «Прогресс М-13М», «Прогресс М-14М», «Прогресс М-15М» и «Прогресс М-17М» был исследован режим пассивной одноосной солнечной ориентации. Начальным условием движения в этом режиме являлась закрутка корабля с угловой скоростью ~2°/с вокруг оси, перпендикулярной к плоскости солнечных батарей (СБ) и направленной на Солнце. В режиме поддержания солнечной ориентации методом закрутки обеспечивается приход электрической энергии до 900 Вт. Этот режим вполне подходит для планируемого в программе ТГК эксперимента с датчиком конвекции «Дакон-П» (рис. 6).
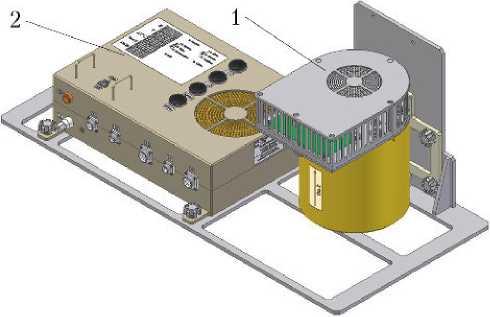
Рис. 6. Научная аппаратура «Дакон-П» на борту ТГК «Прогресс»: 1 — блок управления и сбора данных;
2 — конвекционная камера
В ряде экспериментов требуется создание на борту калиброванных значений микроускорений для изучения их влияния на исследуемые процессы, например, конвекцию. С этой целью на борту станции может быть размещена, например, центрифуга. Для проведения экспериментов с НА «Дакон-П», в которых оценивается влияние микроускорений на процесс конвекции, предложена методика обеспечения калибровочных значений микроускорений с помощью специальных закруток ТГК «Прогресс» [33]. Предлагается установить «Дакон-П» на ТГК и использовать режим закрутки ТГК на Солнце в автономном полете. Это позволит обеспечить необходимый приход электроэнергии и требуемые значения микроускорений для изучения процесса конвекции. До начала эксперимента необходимо уточнить тензор инерции ТГК. Следует отметить, что тензор инерции меняется в полете КА. Это изменение происходит за счет расходования топлива КА в полете, пристыковки и отстыковки от КА новых блоков и элементов, перемещения грузов внутри пилотируемого КА космонавтами и т. д. Например, оказалось, что из-за неравномерной укладки грузов в ТГК в некоторых случаях угол между строительной осью ТГК, перпендикулярной панелям СБ, и соответствующей главной осью инерции составляет до 7°. Поэтому тензор инерции должен определяться в полете КА, так как он является важной характеристикой при управлении движением КА. На ТГК «Прогресс» измеряется угловая скорость вращения корабля, а также направление на Солнце (за счет измерения величины тока, получаемого от СБ). С помощью этих измерений оказывается возможным уточнить тензор инерции корабля [33, 34]. Определив истинное положение главных центральных осей инерции способом, описанным в работе [34], можно осуществлять управление с учетом их положения относительно строительных осей ТГК. Для изучения влияния уровня микроускорений на процесс конвекции предлагается изменять значение угловой скорости ТГК в зависимости от значений температуры в датчике «Дакон» [33].
Пассивные режимы ориентации не требуют энергетических затрат для их поддержания. Однако, их практическое использование потребовало разработки способов управления, позволяющих обеспечить устойчивый неуправляемый полет ТГК и достаточный приход электроэнергии [31, 32].
Для обеспечения устойчивой одноосной гравитационной ориентации и прихода электроэнергии от СБ была предложена технология выполнения закрутки ТГК вокруг продольной оси в определенный момент времени и с определенной скоростью [32]. Закрутка ТГК выполняется при выходе корабля из тени Земли в направлении, соответствующем уменьшению угла между направлением перпендикуляра к активной поверхности СБ и направлением на Солнце. Угловая скорость закрутки принимается равной 360°/ T , где T — период обращения ТГК по орбите. При этом и сохраняется одноосная гравитационная ориентация ТГК, и обеспечивается получение электроэнергии от Солнца.
При нахождении Солнца на произвольном угловом расстоянии от плоскости орбиты аналогично выводятся соотношения для выбора момента времени и угловой скорости закрутки ТГК, обеспечивающие приход электрической энергии и устойчивую одноосную ориентацию ТГК.
В общем случае для проведения экспериментов рекомендуется выбирать параметры закрутки (угловую скорость закрутки и исходную ориентацию ТГК на момент начала закрутки) такие, при которых обеспечивается максимизация суммарной освещенности СБ за виток. При этом желательно, чтобы используемое значение угловой скорости закрутки обеспечивало цикличное повторение ориентации СБ относительно потока солнечного излучения на различных витках
(тем самым достигается постоянство снабжения ТГК и используемой НА необходимой электроэнергией на последовательных витках проведения экспериментов). Такая цикличность обеспечивается, в частности, условием кратности значений угловой скорости закрутки от x и угловой скорости орбитального движения ТГК от 0 , при этом максимизация освещенности активной поверхности СБ ТГК за виток обеспечивается при нечетном значении коэффициента кратности.
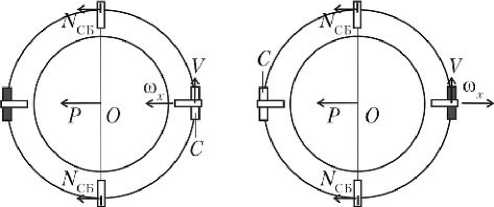
В общем случае рекомендуемые параметры закрутки КА выбираются в зависимости от значения угла в между направлением на Солнце S и плоскостью орбиты (положительное направление отсчета в — в сторону вектора от 0 ) [35]. В качестве иллюстрации на рис. 7 представлены примеры схем ориентации СБ ТГК при закрутках с угловой скоростью от x = |от 0 |.
а) б)
Рис. 7. Схемы ориентации СБ ТГК при от х = | от 0 1: а — для в > 0; б — для в < 0; С — активная поверхность СБ; Р — проекция вектора S на плоскость орбиты; V — вектор скорости
При |от x | = 3|от 0 | в зависимости от значения угла в максимизация освещенности активной поверхности СБ ТГК за виток обеспечивается при двух вариантах параметров закрутки:
-
• А — вектор от x направлен от Земли и в противосолнечной точке витка (точке, в которой радиус-вектор КА направлен против проекции вектора S на плоскость орбиты) нормаль N СБ к активной поверхности СБ составляет минимальный угол с нормалью к плоскости орбиты;
-
• Б — вектор от x направлен к Земле и в противосолнечной точке витка нормаль N СБ к активной поверхности СБ составляет максимальный угол с нормалью к плоскости орбиты.
Обозначаем KА(в, H), KБ(в, H) — коэффициенты суммарной освещенности активной поверхности СБ за виток при параметрах закруток по вариантам, соответственно, А и Б. Для определения оптимальных параметров закрутки находим множество {в*|KА(в, H) = KБ(в, H)} значений угла в, при которых коэффициенты KA(в, H) и KБ(в, H) совпадают. Значения {в*} делят диапазон изменения угла в на отрезки, на которых выполняются неравенства KА(в, H) > KБ(в, H) и KА(в, H) < KБ(в, H). Равенство K 1(в, H) = K2(в, H) всегда выполняется при в = 0 и на солнечных орбитах, определяемых для круговых орбит условием
R
β ≥ arcsin R + 3 H , где R З — радиус Земли.
Обозначаем {в А }, {в Б } — множества значений угла в, при которых выполняются неравенства, соответственно, K А (в, H ) > K Б (в, H ) и K А (в, H ) < K Б (в, H ).
Например, для высоты орбиты Н = 400 км {в*} = {-36,5°; 0; 36,5°} и {в А } = {(в min ; -36,5°); (0; 36,5°)}; {в Б } = {(-36,5°; 0); (36,5°; в тах )}.
Таким образом, в зависимости от значения угла в выполняют гравитационную ориентацию ТГК продольной осью вдоль местной вертикали с закруткой вокруг продольной оси ТГК Ox с угловой скоростью |от x | = 3|от 0 |, направленной от Земли (при в с {в А }) и к Земле (при в с {в Б }), при этом ориентацию ТГК на момент начала закрутки выбирают из условия, что в противосолнечной точке витка вектор N СБ составляет минимальный (при в с {в А }) и максимальный (при в с {в Б }) углы с нормалью к плоскости орбиты.
Описанный подход успешно использовался в эксперименте «Изгиб» на ТГК «Прогресс М-20М», «Прогресс М-23М», «Прогресс М-28М» и др.
заключение
С запуском в 1978 г. первого в мире ТГК «Прогресс-1» связан переход к длительной, эффективной эксплуатации орбитальных станций. Все успешно выведенные на орбиту за 40 лет использования корабли «Прогресс» были состыкованы с орбитальными станциями и выполнили программу совместного полета. Надежность выполнения транспортных операций была обеспечена путем применения разработанных специальных методов управления полетом ТГК.
ТГК «Прогресс» оказались также весьма удобными платформами для выполнения многих космических экспериментов и исследований. Актуальность применения кораблей «Прогресс» для проведения экспериментов в программе МКС возрастает c учетом развития возможностей ТГК.
Предложенные методы и технологии проведения экспериментов с помощью ТГК «Прогресс» позволяют выполнить уникальные исследования и повысить эффективность программы научно-прикладных исследований и экспериментов на МКС.
Список литературы Грузовые корабли "Прогресс" в программах орбитальных станций (к 40-летию первого в мире полета грузового корабля к орбитальной станции)
- Ракетно-космическая корпорация «Энергия» имени С.П. Королёва. Королёв: РКК «Энергия», 1996. 670 с.
- Ракетно-космическая корпорация «Энергия» имени С.П.Королёва в первом десятилетии XXI века. Королёв: РКК «Энергия», 2011. 831 с.
- Микрин Е.А. Перспективы развития отечественной пилотируемой космонавтики (к 110-летию со дня рождения С.П.Королёва)//Космическая техника и технологии. 2017. № 1(16). С. 5-11.
- Елисеев А.С. Техника космических полетов. М.: Машиностроение, 1983. 307 с.
- Кравец В.Г., Любинский В.Е. Основы управления космическим полетом. М.: Машиностроение, 1983. 224 с.
- Бажинов И.К., Гаврилов В.П., Ястребов В.Д. и др. Навигационное обеспечение полета орбитального комплекса «Салют-6» -«Союз» -«Прогресс». М.: Наука, 1986. 376 с.
- Matveeva T.V. Specific features of transport operations planning in case of increasing number of transport vehicles//62nd International Astronautical Congress. Cape Town, 3-7 October 2011. IAC 2011 Proceedings. Congress Guide. Cape Town, South Africa. DVD ISSN 1995-6258.
- Matveeva T.V., Belyaev M.Yu., Tsvetkov V.V. Challenges and perspectives of transport cargo vehicles utilization for performing research in free flight//Acta Astronautica. 2014. V. 94. Issue I. P. 139-144.
- Микрин Е.А., Беляев М.Ю. Пилотируемая космонавтика -основа для развития ракетно-космической техники//Труды LI Чтений К.Э. Циолковского. Секция «Проблемы ракетной и космической техники, г. Калуга, 20-22 сентября 2016. Казань, 2017. С. 5-15.
- Беляев М.Ю. Научные эксперименты на космических кораблях и орбитальных станциях. М: Машиностроение, 1984. 264 с.
- Беляев М.Ю., Рулев Д.Н. Оптимизация планирования экспериментов, выполняемых на орбитальных станциях//Космические исследования. 2007. Т. 45. Вып. 3. С. 236-243.
- Патент 2587763. Российская Федерация. Способ управления спуском космического аппарата при проведении наблюдений. Беляев М.Ю., Матвеева Т.В., Рулёв Д.Н.; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка 2014129426/11; приоритет от 18.07.2014 г.; опубликовано 20.06.2016 г.//Бюллетень № 17. 14 с.
- Основы теории полета космических аппаратов/Под ред. Г.С. Нариманова, М.К. Тихонравова. М.: Машиностроение, 1972. 608 с.
- Муртаф Б. Современное линейное программирование. М.: Мир, 1984. 224 с.
- Моудера Дж., Элмаграби С. Исследование операций. Методологические основы и математические методы. М.: Мир, 1981. 704 с.
- Еремин И.И., Астафьев Н.Н. Введение в теорию линейного и выпуклого программирования. М.: Физматлит, 1976. 192 с.
- Лидов М.Л., Ляхова В.А. Вычислительный алгоритм импульсной коррекции при наличии ограничений//Космические исследования. 1970. Т. 8. № 4. С. 501-514.
- Баранов А.А. Маневрирование космических аппаратов в окрестности круговой орбиты. М.: Спутник+, 2016. 511 с.
- Ларин Ю.Т., Геча Э.Я., Геча В.Я., Хлапов А.А., Любан И.Б., Черкас Я.А. Сматываемая волоконно-оптическая линия передачи для телеизмерений и управления подводными движущимися объектами//Фотон-экспресс. 2005. № 6(46). С. 57-62.
- Патент 2567998. Российская Федерация. Способ зондирования верхней атмосферы. Беляев М.Ю., Матвеева Т.В.; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка 2014112734; приоритет от 01.04.2014 г.; опубликовано 10.11.2015 г.//Бюллетень № 31. 6 с.
- Космические роботы, манипуляторы и системы наведения/В сб. «Расчет, проектирование, конструирование и испытания космических систем»//Ракетнокосмическая техника. Труды. Серия XII. Королёв: РКК «Энергия», 2015. Вып. 1-2. 292 с.
- Марков А.В., Матвеева Т.В., Муртазин Р.Ф., Смирнов А.В., Соловьев В.А, Сорокин И.В., Чурило И.В., Хамиц И.И. Технология запуска микроспутников с использованием транспортных грузовых кораблей типа «Прогресс-М»//Космическая техника и технологии. 2015. № 1(8). С. 42-52.
- Патент 2583981. Российская Федерация. Способ выведения спутника на заданную околоземную орбиту. Беляев М.Ю., Матвеева Т.В.; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка 2014125357/11; приоритет от 23.06.2014 г.; опубликовано 10.05.2016 г.//Бюллетень № 13. 5 с.
- Беляев М.Ю., Викельски М., Лампен М., Легостаев В.П., Мюллер У., Науманн В., Тертицкий Г.М., Юрина О.А. Технология изучения перемещения животных и птиц на Земле с помощью аппаратуры ICARUS на Российском сегменте МКС//Космическая техника и технологии. 2015. № 3(10). С. 38-51.
- Fieldler W. New technologies for monitoring bird migration and behaviour. In: Ringing and Migration//Centenary Issue, 100 years of bird ringing in the UK. 2009. V. 24. P. 175-179.
- Wikelski M., Kays R.W., Kasdin N.J., Thorup K., Smith J.A., Swenson G.W. Going wild: what a global small-animal tracking system could do for experimental biologists//The Journal of Experimental Biology 210, pp. 181-186. The Company of Biologists, 2007.
- Черноусько Ф.Л., Акуленко Л.Д., Лещенко Д.Д. Эволюция движения твердого тела относительно центра масс. М.-Ижевск: Институт компьютерных исследований, 2015. 308 с.
- Беляев М.Ю., Легостаев В.П., Матвеева Т.В., Монахов М.И., Рулев Д.Н., Сазонов В.В. Отработка методов проведения экспериментов в области микрогравитации в автономном полете грузового корабля «Прогресс М-20М»//Космическая техника и технологии. 2014. № 3(6). С. 22-32.
- Брюханов Н.А., Цветков В.В., Беляев М.Ю., Бабкин Е.В., Матвеева Т.В., Сазонов В.В. Экспериментальное исследование режимов неуправляемого вращательного движения КА «Прогресс»//Космические исследования. 2006. Т. 44. № 1. С. 52-61.
- Беляев М.Ю., Матвеева Т.В., Монахов М.И., Сазонов В.В., Цветков В.В. Определение вращательного движения кораблей «Прогресс» по данным измерений угловой скорости и токосъема с солнечных батарей//Препринт Института прикладной математики им. М.В. Келдыша РАН. 2012. № 39. 36 с.
- Патент 2457159. Российская Федерация. Способ одноосной ориентации космического аппарата вытянутой формы. Беляев М.Ю., Брюханов Н.А., Бабкин Е.В., Матвеева Т.В., Сазонов В.В., Цветков В.В.; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка 2010136341/11; приоритет от 30.08.2010 г.; опубликовано 27.07.2012 г.//Бюллетень № 21. 6 с.
- Патент 2457158. Российская Федерация. Способ управления ориентацией космического аппарата с неподвижными панелями солнечных батарей при выполнении экспериментов на орбитах с максимальной длительностью теневого участка. Беляев М.Ю., Брюханов Н.А., Бабкин Е.В., Матвеева Т.В., Сазонов В.В., Цветков В.В.; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка 2010139068/11; приоритет от 22.09.2010 г.; опубликовано 27.07.2012 г.//Бюллетень № 21. 6 с.
- Патент 2581281. Российская Федерация. Способ управления ориентацией космического аппарата при проведении экспериментов с научной аппаратурой по изучению конвекции. Беляев М.Ю., Матвеева Т.В.; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка 2014112742/11; приоритет от 01.04.2014 г.; опубликовано 20.04.2016 г.//Бюллетень № 11. 9 с.
- Патент 2587762. Российская Федерация. Способ определения тензора инерции космического аппарата. Матвеева Т.В., Беляев М.Ю., Сазонов В.В.; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка 2014145296/11; приоритет от 2.11.2014 г.; опубликовано 20.06.2016 г.//Бюллетень № 17. 6 c.
- Патент 2562904. Российская Федерация. Способ управления ориентацией космического аппарата с неподвижными панелями солнечных батарей при выполнении экспериментов. Беляев М.Ю., Матвеева Т.В., Монахов М.И., Рулев Д.Н., Сазонов В.В.; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка 2014103985/11; приоритет от 06.02.2014 г.; опубликовано 10.09.2015 г.//Бюллетень № 25. 11 с. Статья поступила в редакцию 22.12.2017 г.
