Характеристики бортовых лазерных локационных систем и уголковых отражателей для увеличения дальности измерений до 2 000 км при сближении космических аппаратов

Автор: Савчук Дмитрий Владимирович, Старовойтов Евгений Игоревич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Бортовые и наземные комплексы управления и системы
Статья в выпуске: 4 (7), 2014 года.
Бесплатный доступ
В работе определены характеристики бортовых лазерных локационных систем (ЛЛС) и уголковых отражателей, обеспечивающие дальность измерений от 1 000 до 2 000 км при сближении космических аппаратов вне околоземной орбиты. Выполнено сравнение характеристик бортовых ЛЛС, радиотехнических систем для сближения и стыковки, а также терминалов лазерной связи космических аппаратов. Исследовано влияние дифракционных характеристик уголковых отражателей и аберрации скорости на измерения ЛЛС. Представлены математические выражения, основанные на приближениях геометрической оптики, использованные для выполненных в работе расчетов. Обоснован выбор параметров ЛЛС, необходимых для измерений рассматриваемых дальностей. Выполнено математическое моделирование дальностей измерений ЛЛС с использованием различных видов уголковых отражателей. Определена угловая расходимость зондирующих пучков ЛЛС, обеспечивающая требуемые дальности измерений. Проведено математическое моделирование работы ЛЛС с использованием программы «МИТРА». Рассмотрена проблема энергопотребления лазерных источников для бортовых ЛЛС.
Лазерная локационная система, уголковый отражатель, дальность, космический аппарат, математическое моделирование
Короткий адрес: https://sciup.org/14343461
IDR: 14343461 | УДК: 629.78.054:621.375.826
Characteristics of onboard laser ranging systems and corner reflectors to increase the range up to 2 000 km for the rendezvous and docking of space vehicles
The paper defines characteristics of the onboard laser ranging systems (LRS) and corner reflectors that provide a range of measurements from 1 000 to 2 000 km for the rendezvous and docking of space vehicles beyond the low Earth orbit. Compared are characteristics of the onboard LRS, radiolocation systems for rendezvous and docking, as well as terminals of laser communication of space vehicles. The impact of diffraction characteristics of the corner reflectors and aberration of rate on the LRS measurement was investigated. Mathematical expressions based on the geometrical optics approximation used to perform calculations in the paper are presented. LRS parameters necessary to measure the subject distances are substantiated. Mathematical modeling of the LRS measurement ranges using different types of corner reflectors was performed. The angular divergence of LRS probing laser beams providing required measurement ranges was determined. The mathematical modeling of LRS operation using «MITRA» program was conducted. A problem of power consumption of laser sources for onboard LRS was addressed.
Текст научной статьи Характеристики бортовых лазерных локационных систем и уголковых отражателей для увеличения дальности измерений до 2 000 км при сближении космических аппаратов
Бортовые лазерные локационные системы (ЛЛС) с конца 1990-х гг. применяются для выполнения операций сближения и стыковки пилотируемых и автоматических космических аппаратов (КА) [1–3].
Перспективным КА следующих поколений предстоит решать транспортные задачи на орбитах Луны и Марса, что подразумевает выполнение операций сближения и стыковки в условиях, существенно отличающихся от околоземной орбиты. При этом значительно возрастают требования к дальности бортовых измерительных систем.
На дальностях порядка сотен километров преимуществом обладают бортовые измерительные средства радиодиапазона. Так, для управления сближением Лунного модуля с орбитальным КА «Аполлон» применялась радиотехническая система взаимных измерений [4]. Недостатками радиотехнических систем [4, 5] являются большие масса, габариты и энергопотребление. Большая масса приборов приводит к дополнительным затратам топлива при межпланетных перелетах.
Бортовые ЛЛС [1–3] по дальности измерений почти на два порядка уступают радиотехническим системам (0,3…3 км против 400…740 км). При этом существуют лазерные системы, близкие по своему назначению к бортовым ЛЛС, которые обеспечивают значительно бóльшие дальности действия. К ним относятся наземные ЛЛС для траекторных измерений и лазерной локации Луны, а также системы лазерной связи с КА.
Наземные ЛЛС для траекторных измерений КА обеспечивают дальности свыше 40 000 км [6]. С 1960-х гг. проводятся работы по лазерной локации Луны с использованием уголковых отражателей (УО), размещенных в местах высадки экспедиций «Аполлон» и на аппаратах «Луноход» [7]. Максимальная дальность измерений составляет около 400 000 км.
Системы лазерной связи [8–11] отечественной разработки для обмена информацией между КА и наземными пунктами обеспечивают дальности передачи информации до 55 000 км. В этой аппаратуре используются диаграммы излучения с шириной в пределах γ = 12…50 ″ , а допустимая погрешность наведения лазерного канала может составлять от 10 ″ до 1 ′ . Система лазерной связи для автоматического КА LADEE , выполнявшего задачи на окололунной орбите, обеспечивала дальность действия свыше 400 000 км, используя диаграмму излучения с шириной γ = 12 ″ .
В табл. 1 представлены характеристики бортовых радиотехнических систем, ЛЛС для управления сближением и стыковкой КА и бортовых терминалов лазерной связи, позволяющие сравнить их максимальную дальность действия.
Из данных табл. 1 следует, что системы лазерной связи превосходят радиотехнические системы по дальности на один-два порядка, при этом их масса и потребляемая мощность соизмеримы с массой и потребляемой мощностью бортовых ЛЛС, имеющих ограниченную дальность.
При полетах к другим планетам точность предварительного выведения кооперируемых КА перед сближением потребует увеличения дальности измерений бортовых ЛЛС. Начальная дальность автономного сближения определяется точностью сведения кооперируемых КА наземным комплексом управления и конкретными задачами полета. Так, при сближении КА на окололунных орбитах автономное сближение может начинаться с расстояний 50…100 км, а при сближении КА на орбите Марса начальная дальность может превышать 500…600 км [12].
Таблица 1
Характеристики бортовых радиотехнических систем, бортовых ЛЛС для управления сближением и стыковкой КА и бортовых терминалов лазерной связи
|
Система |
Радиотехнические системы |
Лазерные локационные системы |
Бортовые терминалы систем лазерной связи |
|||||
|
[4] |
"Курс" [5] |
VDM [2] |
RVS [3] |
RLS [1] |
БТЛС [11] |
МЛНСС [8] |
LLST [9, 10] |
|
|
КА-носитель |
Лунный модуль, "Аполлон" |
"Союз", "Прогресс", МКС |
АТV |
АТV, HTV |
XSS -1 |
МКС |
Глонасс-М |
LADEE |
|
Рабочие длины волн |
3,05…3,06 см |
9,37 см |
0,81 мкм |
— |
— |
0,81 мкм* 1,55 мкм |
— |
1,55 мкм 1,57 мкм |
|
Максимальная дальность, км |
740 |
400 |
0,3 |
0,73 |
3 |
2 000 |
55 000 |
405 410 |
|
Масса, кг |
33 |
93 |
7,6 |
14,3 |
10 |
80 |
18 |
30,7 |
|
Потребляемая мощность, Вт |
160 |
240 |
36 |
61 |
75 |
150 |
— |
90 |
|
Ответная часть на пассивном КА |
Радиоответчик, масса 7 кг, потреб. мощн. 75 Вт |
Радиоответчик масса 85 кг, потреб. мощн. 170 Вт |
Блоки УО |
Блоки УО |
Не требуется |
Наземный терминал |
Бортовой терминал другого КА |
Наземный терминал |
Примечание. * — для лазерного маяка; БТЛС — бортовой терминал лазерной связи: МЛНСС — межспутниковая лазерная навигационно-связная система.
Увеличение дальности ЛЛС для решения указанных выше задач является актуальным. Цель данной работы — исследование характеристик бортовых ЛЛС и УО, обеспечивающих увеличение дальности измерений от 1 000 до 2 000 км.
Свойства уголковых отражателей
Увеличить дальность обнаружения пассивного КА возможно за счет УО, позволяющих увеличить его эффективную площадь. Достоинства УО состоят в высокой надежности, отсутствии энергопотребления и управления.
Конструктивно УО представляет собой либо полый отражатель, образованный тремя зеркально отражающими поверхностями, либо сплошную призму тетраэдрического типа, работающую на эффекте полного внутреннего отражения или имеющую металлизированные отражающие грани. Двухгранные углы между отражающими поверхностями составляют прямой угол. Падающий на УО световой пучок меняет направление своего распространения на противоположное. Входная грань может иметь форму треугольника, шестиугольника или круга.
Основной характеристикой УО является, в первую очередь, расходимость отраженного пучка излучения. Расходимость излучения — это плоский или телесный угол, характеризующий ширину диаграммы направленности излучения в дальней зоне по заданному уровню углового распределения энергии, определяемому по отношению к максимальному значению (для лазерных пучков обычно по уровню 0,5 или 1/е2).
Угловая расходимость отраженного от УО пучка теоретически определяется его дифракционными свойствами [7]. Половинный угол дифракционной расходимости вычисляется по формуле для диска Эйри a .
Диф
1,22X
где λ — длина волны зондирующего излучения; d УО — диаметр окружности, вписанной во входную грань УО.
Реальное значение расходимости ограничивается точностью изготовления двухгранных углов УО. Для дальностей ЛЛС в диапазоне 10…30 км достаточно, чтобы угол отклонения отраженного пучка от оптической оси УО составлял α УО = 7…13 ″ [13]. В настоящее время технологии позволяют серийно изготовлять УО с погрешностью в единицы угловых секунд [7], однако, как показывают выполненные далее оценки (1), дифракционная расходимость может даже превосходить это значение: α диф > α УО.
При d УО = 50,8 мм для длины волны λ = 1,06 мкм дифракционная расходимость отраженного пучка равна α диф = 5,25 ″ , а для длины волны λ = 1,54 мкм она составляет α диф = 7,63 ″ . Очевидно, что для уменьшения дифракционной расходимости следует увеличивать диаметр УО.
При увеличении диаметра УО соответственно увеличивается его масса, поэтому УО с диаметром более 50,8 мм изготавливают преимущественно полыми, состоящими из трех зеркально отражающих поверхностей.
При d УО = 100 мм на длине волны λ = 1,06 мкм дифракционная расходимость отраженного пучка равна α диф = 2,67 ″ , а для λ = 1,54 мкм — α диф = 3,87 ″ .
Отсюда следует, что работа в спектральном диапазоне λ = 1,54…1,57 мкм будет затруднена большей дифракционной расходимостью пучков излучения. Обычно этот диапазон используется тогда, когда необходимо обеспечить безопасность для органов зрения близко расположенных наблюдателей.
Использование УО с малой расходимостью ограничено аберрацией скорости при зондировании удаленного КА, имеющего большую тангенциальную составляющую скорости. Из-за аберрации скорости выполняется упреждение при наведении узких пучков излучения во время сеанса лазерной связи между движущимися КА [14].
Угловое смещение вследствие аберрации скорости определяется соотношением [7]
2и
где υ τ — тангенциальная составляющая скорости движения КА относительно ЛЛС; с = 3∙108 м/с — скорость света в вакууме.
Из уравнения (2) следует, что для обеспечения α а ≤ 2,67 ″ тангенциальная составляющая скорости не должна превышать 1 941,68 м/с. Тогда не будет необходимости выполнять упреждение при наведении зондирующего пучка ЛЛС.
Для улучшения характеристик обнаружения на пассивном КА устанавливаются блоки из многих УО [7]. Если пассивный КА ориентирован произвольным образом, то на нем с разных сторон должны быть установлены специальные панели, где УО размещаются на гранях правильных многогранников или полусфер.
Результаты моделирования и их обсуждение
Для моделирования характеристик бортовых ЛЛС при работе по одиночным УО и их блокам на дальностях 1 000…2 000 км была использована программа «МИТРА».
Программа «МИТРА» разработана авторами с использованием модели на основе приближений геометрической оптики, определяющих точность получаемых результатов. Выполняемые светотехнические расчеты сводятся к «классическому» уравнению лазерной локации [15, 16].
D =

Е з S УО S пр ρ УО τ пр
ЕΩΩ min пер отр
где Ез — энергия зондирующего импульса; SУО — площадь УО; Ωотр — телесный угол распространения отраженного УО пучка; Sпр — площадь приемной апертуры (входного зрачка); ρУО — коэффициент отражения УО; Ωпер — телесный угол распространения зондирующего пучка; τпр — коэффициент пропускания приемного оптического тракта.
Указанные допущения предполагают, что энергия лазерного импульса равномерно распределена внутри телесного угла:
Ω γ 2 π (4)
пер 4
где γ — расходимость зондирующего излучения ЛЛС.
Аналогично рассматривается пучок, отраженный от УО:
Ω = α 2 π. (5)
отр УО
Из выражений (3–5) следует, что существенного увеличения дальности измерений ЛЛС можно добиться за счет снижения величин γ и α УО.
Исходными данными для программы «МИТРА» служат известные или желаемые значения параметров конструкции ЛЛС и УО, по которым определяются дальность и другие параметры аппаратуры. Вычисления производятся итерационным методом.
Для обеспечения больших дальностей измерений необходимо максимально увеличить значение S пр, т. е. диаметр входного зрачка ЛЛС. Его величина ограничена массогабаритными характеристиками. Для оценки примем d пр = 10 см. В качестве фотоприемников для ЛЛС часто используются лавинные фотодиоды (ЛФД) [3, 7, 16] из-за их высокой чувствительности и компактности.
В первом приближении эквивалентную мощность шума ЛФД можно определить следующим образом
i p = T, (6)
шэ ^
где iТ — темновой ток ЛФД; S λ — токовая чувствительность ЛФД.
Для ЛФД с характеристиками i Т = 100 нА и S λ = 10 А/Вт
Р шэ = 10–8 Вт.
Минимальное значение принимаемой энергии составит [15]
E min = qР шэ t и , (7)
где q — отношение сигнал/шум; t и — длительность зондирующего импульса.
Длительность зондирующего импульса ЛЛС определяет разрешение по дальности: чем короче импульс, тем выше точность измерений. На практике длительность зондирующих импульсов составляет 10…50 нс [3, 15]. В бортовых ЛЛС измерения осуществляются, как правило, моноимпульсным зондированием, а частота повторения зондирующих импульсов определяется диапазоном измеряемых дальностей и типом лазера.
Для получения надежного измерения отношение сигнал/шум, в оптимальном варианте, выбирается равным q = 7…10 [15], но не менее чем q = 3 [16]. Примем величину q = 10, ей соответствуют значения вероятностей ложной тревоги Р лт = 10–6 и пропуска сигнала Р пс = 10–7 (определяются с использованием критерия Неймана-Пирсона), обеспечивающие приемлемую надежность измерений.
Тогда при длительности зондирующего импульса t и = 10 нс минимальная принимаемая энергия будет равна E min = 10–15 Дж.
Угловое разрешение бортовых ЛЛС, кроме характеристик приемной оптической системы, также определяется шириной диаграммы зондирующего пучка γ , которая обычно составляет около 1 ′ 43 ″ …12 ′ [1, 3, 6, 16], т. е. на 1-2 порядка шире, чем у пучков, используемых в лазерной связи.
Однако основное отличие систем этих двух классов (ЛЛС и системы лазерной связи) заключается в том, что для осуществления сеанса лазерной связи требуется навигационная информация для предварительной выставки оптических антенн, заранее получаемая траекторными измерениями. Предполагается, что перспективные системы лазерной связи будут сами получать навигационные данные для своей работы [14].
При работе бортовых ЛЛС взаимодействующие КА могут быть ориентированы произвольным образом. Наведение зондирующего пучка, захват и сопровождение по угловым координатам пассивного КА не должны представлять дополнительных сложностей, поэтому здесь целесообразно использовать более широкие пучки излучения, чем в системах лазерной связи.
Для вычисления необходимой энергии зондирующего импульса примем расходимость зондирующего пучка в пределах γ = 0 ′ 41 ″ …3 ′ 26 ″ , как у большинства ЛЛС различного назначения [6, 15, 16]. Площадь УО ( S УО) в первом приближении определяется как площадь окружности, вписанной в его входную грань. Коэффициент отражения (эффективность) УО выберем равным ρ УО = 0,95. Потери в приемной оптической системе ЛЛС примем на уровне τ пр = 0,9.
Результаты моделирования работы ЛЛС по блоку УО с параметрами S УО = 600 см2; α УО = 10 ″ , а также одиночным УО с d УО = 100 мм ( S УО = 78,5 см2); α диф = 2,67 ″ и d УО = 50,8 мм ( S УО = 20,3 см2); α диф = 5,25 ″ , представлены в табл. 2.
Зависимости дальности измерений ЛЛС с расходимостью зондирующего пучка γ = 3 ′ 26 ″ от энергии зондирующего импульса при использовании УО с указанными параметрами представлены на рисунке.
Таблица 2
Результаты моделирования работы ЛЛС по различным УО
|
Тип УО |
УО , см2 |
α УО , ″ |
γ |
Е з , мДж |
|
|
D = 1 000 км |
D = 2 000 км |
||||
|
Блок УО |
600 |
10 |
1 ′ 43 ″ |
3,6 |
57,6 |
|
3 ′ 26 ″ |
14,4 |
230,3 |
|||
|
Одиночный УО с d УО = 100 мм |
78,5 |
2,67 |
3 ′ 26 ″ |
7,8 |
125,5 |
|
Одиночный УО с d УО = 50,8 мм |
20,3 |
5,25 |
0 ′ 41 ″ |
4,7 |
75,0 |
|
3 ′ 26 ″ |
117,3 |
1 876,2 |
|||
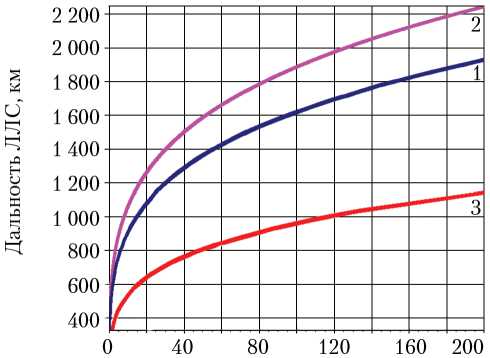
Энергия зондирующего импульса, мДж
Зависимости дальности измерений лазерной локационной системы с расходимостью зондирующего пучка γ = 3 ′ 26 ″ от энергии импульса при использовании УО: 1 — SУО = 600 см2, α УО = 10 ″ ; 2 — SУО = 78,5 см2, α УО = 2,67 ″ ; 3 — SУО = 20,3 см2, α УО = 5,25 ″
Для получения зондирующих импульсов с энергией до 100…200 мДж могут использоваться твердотельные лазеры с диодной накачкой, имеющие КПД 20…30%.
Использование УО с меньшей площадью и бóльшим значением α УО потребует дальнейшего увеличения энергии импульса. Однако для получения энергии импульса твердотельных лазеров свыше 100…200 мДж придется использовать твердотельные лазеры с ламповой накачкой, имеющие эффективность на порядок меньше, что будет неизбежно увеличивать энергопотребление аппаратуры.
На излучение может расходоваться до 30% энергии, потребляемой аппаратурой. Если мощность, потребляемая ЛЛС, равна 100 Вт, а на излучение расходуется 30 Вт, то замена диодной накачки твердотельного лазера на ламповую накачку приведет к увеличению энергопотребления всей системы до 370 Вт. Это значение больше, чем у радиотехнических систем (см. табл. 1).
Снизить энергию зондирующих импульсов позволяют узкие диаграммы зондирующего излучения ( γ = 0 ′ 41 ″ ), но в таком случае потребуется наведение и удержание зондирующего пучка на пассивном КА с соответствующей точностью.
Выводы
Результаты моделирования показывают, что применение блока УО с площадью S УО = 600 см2 и α УО = 10 ″ позволяет обеспечить дальность измерений ЛЛС 1 000...2 000 км при энергиях зондирующего импульса 14...230 мДж. Для получения импульсов с энергией до 200 мДж могут быть использованы твердотельные лазеры с диодной накачкой.
При использовании диаграмм зондирующего излучения с шириной 3 ′ 26 ″ и одиночных УО со значениями α диф > 2,67 ″ (для длины волны λ = 1,06 мкм) потребуется применение твердотельных лазеров с ламповой накачкой, что приведет к увеличению энергопотребления и массогабаритных характеристик ЛЛС.
Полученные оценки позволяют определить характеристики ЛЛС и УО, необходимые для решения задачи локации пассивного КА на дальностях 1 000…2 000 км.
Преимуществом ЛЛС перед радиотехническими системами является меньшая масса: 7,6…13,3 кг для ЛЛС и 33…93 кг для радиотехнических систем соответственно (см. табл. 1). Масса одиночных УО и конгломератов из нескольких УО не превышает 0,5…2 кг. Это существенно с точки зрения снижения затрат топлива и увеличения массы полезного груза при полетах КА вне околоземной орбиты.
Результаты исследований планируется использовать при разработке систем управления сближением и стыковкой КА для экспедиций к другим планетам, при обслуживании спутников на геостационарной орбите и для выполнения задач межорбитальными буксирами.
Список литературы Характеристики бортовых лазерных локационных систем и уголковых отражателей для увеличения дальности измерений до 2 000 км при сближении космических аппаратов
- Liadsky J. Recent Advancements in Commercial LIDAR Mapping and Imaging Systems. Режим доступа: http://www.nps.edu/Academics/Centers/RSC/documents/RecentAdvancements. pdf (дата обращения 26.01.2013 г.).
- Videometer. Режим доступа: http://www. sodern.com/sites/docs_wsw/RUB_54/VDM.pdf (дата обращения 14.01.2012 г.).
- Michel K., Ullrich A. Scanning time-of-flight laser sensor for rendezvous manoeuvres. Режим доступа: http://robotics.estec.esa.int/ASTRA/Astra2004/Papers/astra2004_S-02.pdf (дата обращения 14.01.2012 г.).
- Гончаревский В.С. Радиоуправление сближением космических аппаратов. М.: Советское радио, 1976. 240 с.
- Оружие и технологии России. Т. 5. Космические средства вооружения/Под общ. ред. Иванова С.Б. М.: ИД «Оружие и технологии». 2002. 704 с.
- Оружие и технологии России. Т. 11. Оптико-электронные системы и лазерная техника/Под общ. ред. Иванова С.Б. М.: ИД «Оружие и технологии». 2005. 720 с.
- Козинцев В.И., Белов М.Л, Орлов В.М. и др. Основы импульсной лазерной локации: Учеб. пособие для вузов/Под ред. Рождествина В.Н. М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. 512 с.
- ОАО «НПК «СПП». Участие в ГЛОНАСС. Режим доступа: http://www.npk-spp.ru/deyatelnost/glonasshtml (дата обращения 29.06.2013 г.)
- Design of the ESA Optical Ground Station for Participation in LLCD. Режим доступа: http://icsos2012.nict.go.jp/pdf/1569600363.pdf (дата обращения 04.12.2013 г.)
- Lunar Laser Communication Demonstration. Режим доступа: http://esc.gsfc.nasa.gov/assets/images/LLCD/LLCD%20publications/LLCD_ litho_final_8.13.13_download.pdf (дата обращения 04.12.2013 г.)
- ОАО «НПК «СПП». Межспутниковые лазерные системы передачи информации. Режим доступа: http://www.npk-spp.ru/deyatelnost/lazernaya-svyaz.html (дата обращения 29.06.2013 г.)
- Бакитько Р.В., Васильев М.Б., Винницкий А.С. и др. Радиосистемы межпланетных космических аппаратов/Под ред. Винницкого А.С. М.: Радио и связь, 1993. 328 с.
- Старовойтов Е.И., Савчук Д.В. Исследование и оптимизация применения уголковых отражателей для локации космических объектов//Космическая техника и технологии. 2013. № 1. С. 38-43.
- Королев БВ, Кочергин П.П. Использование комплекса аппаратуры космической оптической линии связи для решения задач высокоточной автономной навигации и ориентации космического аппарата. Вторая Всероссийская научно-техническая конференция «Современные проблемы ориентации и навигации космических аппаратов»/Под ред. Аванесова Г.А. Россия, Таруса. 13-16 сентября 2010 г. Сборник трудов. М.: ИКИ РАН, 2011. С. 129-140.
- Назаров В.Н., Балашов И.Ф. Энергетическая оценка импульсных лазерных дальномеров. СПбГУИТМО, 2002. 38 с. Режим доступа: http://de.ifmo.ru/bk_netra/start.php?bn=27 (дата обращения 19.01.2012 г.).
- Ставров А.А., Поздняков М.Г. Импульсные лазерные дальномеры для оптико-локационных систем//Доклады БГУИР 2003. Т.1. № 2. С. 59-65.
