Holding problem for Gronoull limited controls

Author: Mirzamakhmudov U.A., Mutalliyev N.N.
Journal: Экономика и социум @ekonomika-socium
Section: Основной раздел
Article in issue: 6-2 (97), 2022.
Free access
In this paper, the control problem for second-order differential games with Granoull boundedness is studied. In this case, a parallel pursuit strategy is constructed for the pursuer and with its help, sufficient conditions for the capture problem are given.
Differential game, geometric boundedness, parallel pursuit strategy, chaser, escaper, acceleration, granoull bounded
Short address: https://sciup.org/140300454
IDR: 140300454 | UDC: 517.956.6
Text of the scientific article Holding problem for Gronoull limited controls
Rn fazoda P va E obyektlar berilgan va ularning harakatlari quyidagi differensial tenglamalarga asoslangan t
-
P : x = u , x ( 0 ) - kx ( 0 ) = 0 , | u ( t )|2 < p 2 + 2 l j| u ( s )|2 ds , (1)
0 t
-
E : y = v , y ( 0 ) - ky ( 0 ) = 0 , v ( t )|2 < a 2 + 2l j v ( s )|2 ds , (2)
bu yerda x - P obyektning Rn fazodagi holati, x0 = x (0), x{ = x (0) -uning mos ravishda t = 0 vaqtdagi boshlang’ich holati va boshlang’ich tezligi; u -quvlovchining boshqariladigan tezlanishi bo’lib u : [0,ад)^ Rn va u vaqt bo‘yicha o‘lchanuvchi funksiya sifatida tanlanadi; barcha
t
|u(t )|2 < p 2 + 2 lj|u ( s )|2 ds shartni qanoatlantiruvchi bunday u ( • ) o’lchanuvchi 0
funksiyalar to’plamini G bilan belgilaymiz. y–E obyektning Rn fazodagi holati, y0 = y ( 0), yx = y ( 0) - uning mos ravishda barcha
t
|v ( t )|2 < a 2 + 2lj|v ( s )|2 ds shartni qanoatlantiruvchi bunday v ( • ) o’lchanuvchi 0
funksiyalar to‘plamini G bilan belgilaymiz.
Ta’rif 1. Agar ( x 0, x , u ( • ) ) , u ( • ) £ Gp uchlik berilgan bo’lsa, (1)
tenglamaning quyidagi yechimiga quvlovchining harakat trayektoriyasi deyiladi ts x ( t ) = x 0 + tx + jj u ( t ) d r ds . 0 0
Ta’rif 2. Agar ( y 0, y1 , v ( • ) ) , v Qe Ge uchlik berilgan bo'lsa (2)
tenglamaning quyidagi yechimiga qochuvchining harakat trayektoriyasi deyiladi ts y (t) = y0 + У +£р(т)drds.
0 0
Ta’rif 3. (1)-(2) masala uchun tutish masalasi ([1]-[2]) yechilgan deyiladi, agar qochuvchining ixtiyoriy v ( • ) e GE boshqaruv funksiyasi uchun quvlovchining shunday u * ( • ) e Gp boshqaruv funksiya mavjud bo‘Isaki, biror chekli t * vaqtda quyidagi tenglik bajarilsin
x ( t *) = У ( t *).
Ta’rif 4. (1) – (2) masala uchun quvlovchining П-strategiyasi ([3]-[4]) deb quyidagi funksiyaga aytamiz, u ( v ) = v - Л( v )^o,
bunda 4 = z ^, Л ( v ) = ( v , 4 0 ) + J( v 4 / + 3 e2 lt , 3 = P 2 - a 2 ^ 0 , ( v, 4 ) — v I z 0
va 4 vektorlarning R n fazodagi skalyar ko’paytmasi.
Teorema. Agar Granoull chegaralanishli ikkinchi tartibli differensial o‘yin (1)(2) uchun quyidagi shart p > a o'rinli bo'lsa, u holda П-strategiya (4) yordamida tutish masalasi (0,t) yechiladi va obyektlar orasidagi yaqinlashish funksiyasi quyidagicha bo‘ladi f (l, t, | z 01, p, a, k) = \z 01 (kt +1)
p - a p - a p - aelt + ^ + --1
l 2 l 2 l
Isboti. Faraz qilamiz, agar qochuvchi ixtiyoriy v(•) e GE bo'lganda, quvlovchi esa (4) ko‘rinishdagi strategiyani tanlasin, u holda (1) va (2) tenglamalarga asosan quyidagi Karateodori tenglamasini topamiz z = -Л( v (t ))^0, z ( 0)-k (0 ) = 0,
Bundan boshlang’ich shartlarni berilishi bo’yicha quyidagi yechim aniqlanadi ts
z(t) = z0 (kt +1)-^ JJ1(v(t),^)drds yoki ts
I z ( t )| = l z 01 ( kt + 1 ) -П ( ( v , ^ 0 ) + v( v , ^ 0 )2 + d e2 lt ) d T ds .
0 0
Lemmaga ko’ra quyidagi tengsizliklarni hosil qilamiz
I z ( t )| < | z 01 ( kt + 1 ) - [j el T ( p - a) d z ds ^
0 0
I z ( t )| < z 0k kt + 1) - p e + ^ - P + t
Agar f (l , t , | z 01 , p , a , k ) = | z 01 ( kt + 1)
p - a
l2
lt p - a p - a e + — 0 + ----1
l2 l
desak
*
bu funksiyani nolga aylantiruvchi musbat t vaqtni topamiz.
p - a lt p - a p - a
J2 e = lz0 | (kt + 1) + J2 + J t , oxirgi tenglikni soddalashtirish orqali quyidagi tenglikni hosil qilamiz, el = t
z l k 2 + 1 1+
0 + 1
p - a
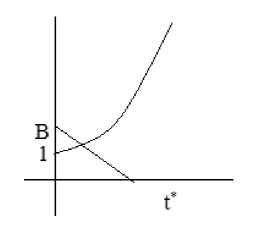
bunda A = — +1, B = — +1 bo’lib, bu yerda p > a, B > 1. Natijada p - a p - a quyidagi tenglikka ega bo‘lamiz el = At + B (5)
Tutish vaqtini aniqlash uchun (5) tenglamani quyidagi hollarini ko‘rib chiqamiz.
1. A < 0 ^ k <

*
bo lsin. U holda (5) tenglama yagona t > 0 musbat yechim mavjud va bu yechim tutish vaqti bo‘ladi. (1-chizma)
2. A = 0 ^ k = 0_P z0 l
bo‘lsin. U holda (5) tenglama yechimi
In 0 + 1
* I p - a J t = —----------- bo’lib, tutish vaqtini beradi.
a — p
-
3. A > 0 ^ k > bo lsin. U holda (5) tenglama t > 0 musbat yechimi
z0 l mavjud va bu yechim tutish vaqti bo‘ladi.
(1-chizma)
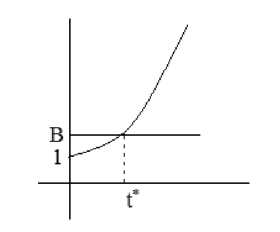
(2-chizma)
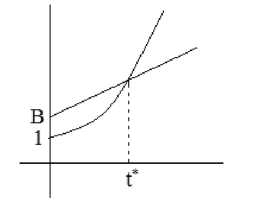
(3-chizma)
Foydalanilgan adabiyotlar
-
1. Isaacs R. Differential games. John Wiley and Sons, New York, 1965 .
-
2. Nahin P.J. Chases and Escapes: The Mathematics of Pursuit and Evasion. Princeton University Press, Princeton, 2012 .
-
3. Azamov A.A., Samatov B.T. The П-Strategy: Analogies and Applications. The Fourth International Conference Game Theory and Management , St. Petersburg, Russia: 2010, p. 33-47.
-
4. Samatov B.T. The Pursuit- Evasion Problem under Integral-Geometric constraints on Pursuer controls. Automation and Remote Control, Pleiades Publishing, Ltd. New York: 2013, 74(7), p. 1072-1081.
"Экономика и социум" №6(97) 2022
References Holding problem for Gronoull limited controls
- Isaacs R. Differential games. John Wiley and Sons, New York, 1965.
- Nahin P.J. Chases and Escapes: The Mathematics of Pursuit and Evasion. Princeton University Press, Princeton, 2012.
- Azamov A.A., Samatov B.T. The П-Strategy: Analogies and Applications. The Fourth International Conference Game Theory and Management, St. Petersburg, Russia: 2010, p. 33-47.
- Samatov B.T. The Pursuit- Evasion Problem under Integral-Geometric constraints on Pursuer controls. Automation and Remote Control, Pleiades Publishing, Ltd. New York: 2013, 74(7), p. 1072-1081.
