Hybrid Energy Regulated Constant Gain Kalman-Filter for Optimized Target Detection and Tracking in Wireless Sensor Networks

Author: Urvashi Saraswat, Anita Yadav, Abhishek Bhatia
Journal: International Journal of Computer Network and Information Security @ijcnis
Article in issue: 5 vol.15, 2023.
Free access
Wireless Sensor Networks (WSNs) are one of the most researched areas worldwide as the wide-scale networks possess low cost, are small in size, consume low power, and can be deployed in various environments. Among various applications of WSNs, target tracking is a highly demanding and broadly investigated application of wireless sensor networks. The parameter of accurate tracking is restricted because of the limited resources present in the wireless sensor networks, noise of the network, environmental factors, and faulty sensor nodes. Our work aims to enhance the accuracy of the tracking process as well as energy utilization by combing the mechanism of clustering with the prediction. Here, we present a hybrid energy-regulated constant gain Kalman filter-based target detection and tracking method, which is an algorithm to make the best use of energy and enhance precision in tracking. Our proposed algorithm is compared with the existing approaches where it is observed that the proposed technique possesses efficient energy utilization by decreasing the transference of unimportant data within the sensor network, achieving accurate results.
Wireless Sensor Networks, Target Detection, Target Tracking, Kalman Filter
Short address: https://sciup.org/15018643
IDR: 15018643 | DOI: 10.5815/ijcnis.2023.05.04
Text of the scientific article Hybrid Energy Regulated Constant Gain Kalman-Filter for Optimized Target Detection and Tracking in Wireless Sensor Networks
In the recent research covering the areas of digital electronics, microelectronic devices, and wireless communications has authorized the deployment of substantial-scale sensor networks over a large remote area. Wireless sensor networks (WSN) are located using a vast number of sensor nodes that can accumulate data from remote surroundings and then further process that data to produce useful information [1]. These sensors are of divergent ranges like infrared, thermal, acoustic, vibration, force, etc., which monitor various environmental conditions such as light, temperature, noise, velocity, and load/weight, respectively [2,3]. Wireless sensor networks possess many applications in the field of surveillance as well as communication in the military, monitoring the forest environment or agricultural fields, detecting diseases in the medical domain, etc.
From the wide range of applications in wireless sensor networks, target tracking is an important and widely used application, but at the same time is most challenging because of the limitations in the wireless sensor networks like the unpredictability of the environment, limited battery of the sensor nodes, and run-time failure of nodes or high-mobility possessed by the large [4]. The sensor nodes with limited energy should assist in sensor functioning, communication establishment with the neighbor nodes, and onboard signal processing [5]. Thus, it is significant to devise an energyefficient signal processing and communication protocol. The lifespan of a sensor network is determined by the energy consumed by each sensor node. Therefore, there has to be efficient energy management that can issue an extensive lifetime of a network.
Energy constraint is considered the most common issue in wireless sensor networks wherein the maximum energy is consumed during data communication. The duration of the network lifetime is dependent on the energy needed for the operations associated with the sensor nodes. Once these sensor nodes are deployed, it is unattainable to charge or restore the battery. Therefore, for the expansion of the network lifetime, it is essential to utilize sensor energy efficiently.
In this paper, we propose a hybrid energy-regulated mechanism of target tracking algorithm with constant gain Kalman-filter [6] to identify and trace the mobile target in a sensor network region. This proposed technique depends on the clustering and prediction-dependent collaborative strategy. This technique efficiently regulates energy by decreasing the unwanted data transmission amidst the sensor nodes as well as the base station. Therefore, the algorithm proposed by us is inspected for a static base station model wherein the location of the base station is at a fixed position and, in the second case, when it moves in a dynamic manner within the sensor network region. It discovers the precise path of the target and decreases the error in the localization process.
2. Related Works
Target tracking is considered widely known and utilized applications of wireless sensor networks. The target tracking schemes are majorly identified in fewer than four major categories: tree, prediction, cluster, and hybrid-based tracking methods [7]. In [8], the tracking mechanism has been designed to locate people, identify their current locations, keep a count of existing people, and also to track their mobility. With the novelty of using radio waves for surveillance to exploit the property of penetrating the buildings in [9] the authors proposed a motion tracking scheme. In [10] Din et al. discussed a cluster-oriented malting scheme that works for both direct and multi-hop routing mechanisms so as to amplify the lifetime of the network of Wireless sensor network.
In [11], the authors form a well-organized liable-to-failure target observation-based algorithm which discovers as well as improves from the binary node failure. This technique expands the precision of the boundary prediction technique.
In the overall approach, the localization of the target is performed by the local sensor nodes. In [12] authors presented a trilateration approach using RSSI to drive comparisons between the ISM868 and the use of the ZigBee approach, whereas the authors in [13] discussed the role of the path-loss model in order to map the RSSI to the distance calculated. The outcomes in these approaches did not show the desired figures when the localization technique was utilized.
The target position was identified with the use of a range-based sensing method [14,15]. The implementation of prediction kinematics is unable to predict the accurate location of the target in an environment full of noise. Thus, because of the restricted battery energy store, the low-power operation of the wireless sensor networks should be embraced to expand the processing lifetime as well as to decrease the maintenance cost involved. In [16,17] authors discussed the enhancement of accuracy by drawing comparative results with different RSSI numbers, wherein [17] also presented the use of various frequencies to measure RSSI. In a similar approach used by [18], a location identification method was deployed using the learning techniques where a group of regression trees was used to detect the target position efficiently.
Wireless sensor networks, in particular, depend on the collaborative signal and the processing of information to the dynamic management of sensor resources along with the efficient process of distributed information. In this direction, the role of an energy-efficient target-tracking approach in a wireless sensor network will be examined.
The concept of the Kalman Filter is majorly used as the state predictor for mainly the linear systems as well as the Gaussian noise. The unpredictability while measuring instruments, as well as sensors' calculated noise, yields wide estimation error in the Kalman Filter, which ultimately reduces the performance of the predictor [19].
In [20] authors proposed an Interactive Multiple Model (IMM), which is framed for utilizing more than one filter as well as sensors to discover. This mechanism focuses over the utilization of various filters as well as sensors so as to discover and track the target, thus, consuming high energy for target tracking. In [21], there is an implementation of a non-linear distance-oriented observation model, and the unscented Kalman filter is utilized because of the superiority in the performance for high-activity-based targets.
It can be perceived that the gain values possess a higher influence over the filter prediction. Therefore, efficient tracking outcomes can be attained by making the most effective gain value. The constant gain Kalman filter [22], implements the genetic algorithm to calculate the most favorable gain value. The prevailing filter-associated algorithm extends the Kalman filter [23] and the constant gain Kalman filter on the cluster head or the sensor nodes.
This leads to a substantial evaluation responsibility over the sensor nodes as they possess restricted batteries as well as the power supply. In Table 1., we can observe the summary demonstrating the relative analysis algorithms which perform target tracking present in the wireless sensor networks. It can be contemplated that the methods advanced in the related works are limited to the static base station model.
In multiple applications of wireless sensor networks, there can be seen a requirement to gather data for the mobile base station model [24-26], wherein the military surveillance, this moving base station model is connected to an unmanned aerial vehicle, i.e., UAV so as to identify the enemy troops [27]. In the applications of forest area monitoring, a robot is deployed to gather the data from the nodes present in the selected field so as to target the animals and keep them under surveillance [28,29].
In the proposed algorithm, there is a need for data communication while the accuracy of the prediction exceeds the threshold. The analysis performed for the proposed algorithm is done for both static as well as the ambulant base station model. The estimation of the target position yields precision-based tracking outcomes. The proposed algorithm utilizes a constant gain Kalman filter [25] over the base station so as to estimate the position of the target and lower the complexity. It also predicts the more accurate location of the target to yield better outcomes. The boundary problem is also overcome because of the estimated future position.
Table 1. Comparing the target tracking schemes
|
Author and year |
Tracking mechanism |
Accuracy |
Energy consumption |
Mobility of BS |
|
Dr. Mugunthan, 2020 [10] |
Prediction |
Less |
Less |
No |
|
Zhang et. al 2019 [11] |
Clustering and Prediction |
Average |
Less |
No |
|
Leela et.al 2021 [12] |
Clustering and Prediction |
Average |
Excessive |
No |
|
Ahmadi et al., 2018 [13] |
Clustering and Prediction |
Average |
Average |
No |
|
Khalifeh et al., 2019 [14] |
Clustering and Prediction |
Excessive |
Average |
No |
|
Jondhale & Deshpande, 2019 [15] |
Clustering and Prediction |
Excessive |
Excessive |
No |
|
Balakrishnan et al., 2021 [16] |
Clustering |
Excessive |
Excessive |
No |
|
Klaina et al., 2018 [17] |
Prediction |
Excessive |
Excessive |
No |
|
Chu et al., 2020 [18] |
Clustering and Prediction |
Average |
Excessive |
No |
|
Karthika and Ramalakshmi, 2013 [26] |
Clustering and Prediction |
Average |
Excessive |
No |
3. Methodology
There are many target tracking techniques where much energy is consumed as there is a considerable amount of unnecessary active sensor nodes involved in the process, where many are not even a part of the tracking procedure. In the proposed tracking approach, this drawback is overcome, and the base station estimated the future target position with the implementation of a constant gain Kalman filter. The estimated target position (ETP) is shared with the cluster head (CH), which is nearby the target, followed by three sensor nodes which are located nearby the target and are activated by the cluster head for the process of tracking.
The Trilateration algorithm [15] is implemented for localizing the target in our proposed algorithm. Of the selected three sensor nodes, two of them share their length with the chief sensor node, and this chief sensor node is chosen by the cluster head, which possesses a robust selection specification. The ratio of energy (E), as well as the distance (d), is the selection specification [17], where the chief sensor node implements the trilateration algorithm to discover the target and thus direct the present location (PL) of the located target with the cluster head. Therefore, the cluster head is aware of the estimated target position (ETP), which is obtained from the base station, as well as the present location, i.e., PL, which is obtained from the chief node.
In case of variation between the values is obtained more than the threshold, then transfer from the cluster head to the base station is performed. Thus, in such instances, the cluster head transfers the PL of the discovered target with the base station so as to provide accurate as well as updated value of the position of the target. Moreover, if in case the variation obtained is within the threshold, then the base station reserves the ETP as the position of the target. Therefore, in the proposed technique, the energy utilized is reduced because of the decreased data transfer occurrences.
-
3.1. Presumptions of the Proposed Scheme
-
• There is a random distribution of all nodes which are stationary in nature.
-
• While the network is established, all the present sensor nodes are in their sleep state.
-
• Nodes have a fixed position after the deployment of the network i.e. they cannot change their positions once the entire network is established.
-
• The proposed technique uses single hop based communication.
-
• Cluster head is not in the sleep state while the network deployment. Also, cluster heads possess a good amount of energy than other sensor nodes present in the network.
-
• Base station consists of information about the position of all sensor nodes along with the initial residual energy (RE).
-
3.2. Pseudo Code for Proposed Tracking Technique
-
• Let us consider Sd ={S1, S2, S3, S4,…,Sn}to be the set of deployed sensor nodes wherein n is the total sensor node count in the given network where the position of base station (BS) is at coordinates (70,70) in the given wireless sensor networks.
-
• The instance of identifying the target within the bounds of the sensing range of these sensor nodes, the sensor
node which identifies the target shares the initial position with the base/control station (BS) via cluster head (CH).
-
• Now the base station will estimate the immediate location i.e. loci+1 which the ETP of the identified target with the implementation of constant gain kalman filter, where:
Cost (it, s') = -^Z^CseQi * s * seqt + log|s|)
Nref
seqt = mi — Obt * rei(2)
rei+1 = ret + it * seqt(3)
Here in equations (1), (2) and (3), s is the randomly generated noise measurement; Nref is count of the reference
locations, seqi is the innovative sequence defined as the linear variation of the computations and its predicted value.
The value mi is the computation of the real state rei at time instance i. As soon as the most favorable gain i.e. the ii
is measured with the use of genetic algorithm wherein the cost function is implemented in equation (1) and the CGKF
algorithm is implemented for the estimation of the immediate future target position and then update it in the base station
' 1
as given in equation (3). Here, the observation model is framed in a matrix Obi which is given as
L 0
-
• The estimated target position (ETP) by the base station is sent to the active cluster head which identifies three sensor nodes (St) nearby the ETP, where:
S t = {St1, St2, St3} , where St t E Sd
-
• The cluster head determines the chief nodes Sc £ St, which possesses a higher value of selection ration (Rs) of the residue energy (ER) and the distance (dt) from the identified target, where:
R
s
E r d t
-
-
• The three selected nodes (VSt|St £ {St1, St2, St3}& S t ^ Sc} computes dt from the present position of target and then transmits further to Sc. The chief node i.e. Sc now computes the PL with the use of trilateration algorithm and utilizes the data obtained from two selected nodes and self-sensed information. The computed PL is transmitted to the CH. Now the active CH computes the variation between the ETP as well as the PL and then differentiates it with the defined threshold value i.e. (6) , where:
If(ETP-PL) is more than 6
then, CH transmits PL to the base station.
Else, no data is sent by CH and base station saves the ETP.
End.
• Reiterate from Step 3 to Step 6 till the target is discovered inside the sensing area within the network at an interval of every 0.75 seconds.
4. Result and Discussion
This pseudocode was implemented using the MATLAB for both fixed base station model as well a mobile base station model. For computing the energy so as to send and receive information, we utilized the radio hardware energy dissipation model. The network framework as shown in Table 2., demonstrates all the simulation parameters, and the assessment of this proposed technique is performed using the given parameters:
-
• Tracking accuracy
-
• Residual energy of the network
-
• Lifetime of the network
Table 2. Simulation specifications
Estimating path
|
Experimental parameters |
Values |
|
Field dimensions |
100x100 m2 |
|
Sensor node count |
{100,200,300,400} |
|
Base station position (static) |
(50,50) |
|
Initial energy (Ei) |
0.5 J |
|
Threshold (δ) |
1m |
|
Speed of target |
0-10m/s |
|
Sensing range |
15m |
|
Communication range |
30m |
|
Base station mobility |
2m/s |
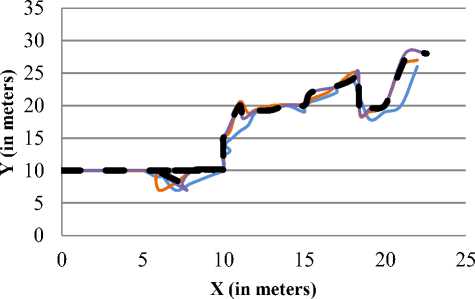
Trilateration based existing technique
Kalman filter based exsiting technique
Proposed Energy saving constant gain kalman filter
Actual path
Fig.1. Comparing actual path with other path estimations observed with existing as well as proposed techniques
While analyzing the results for the instance of static base station model; we compute the proposed technique performance on the basis of the path prediction based accuracy, where in Fig.1, we can observe the comparison of the proposed algorithm with the existing target tracking techniques [15,26] wherein our proposed technique demonstrates most favorable position prediction.
The performance of proposed algorithm is superior as the implementation of CGKF algorithm optimizes the noise by identifying the constant gain implementing the genetic algorithm. The root mean square error (RMSE) of the proposed algorithm is decreased in contrast to the trilateration algorithm as well as the kalman filter. The root means square error inspection of the proposed method, trilateration and the kalman filter can be seen in the Table 3.
Table 3. Analyzing the estimation techniques along with the proposed techniques for Root Mean Square Error
|
Techniques for estimation |
Root Mean Square Error (in %) |
|
Exisitng technqiue which uses trilateration |
18.77 |
|
Kalman Filter approach (existing) |
13.02 |
|
Proposed Energy saving constant gain kalman filter |
1.01 |
While the motion of the target in the network of 100 to 500 sensor nodes, we have performed the analysis of the behavior of the entire network with respect to the energy consumption. The implemented model of radio hardware energy dissipation in the propound method computes both the sent and received energy [28].
In Fig. 2, we can observe the residual energy of the network for the interval of initial 60 seconds of the tracking inside the network of 500 sensor nodes. The obtained simulation outcomes show the decrement in the consumed energy and thus, the enhancement in the energy utilization is obtained because of the prediction mechanism of the CGKF that is run on the base station. This assists in decreasing the sending data from the cluster head towards the control station.
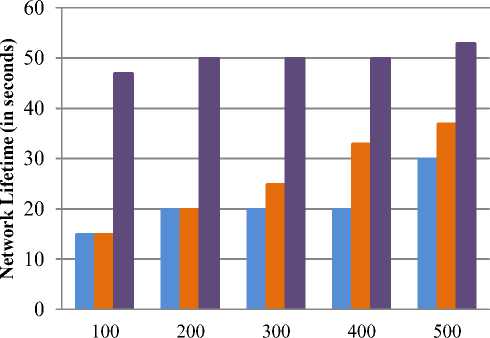
The threshold value set here is 1m, for the proposed technique. It can be obtained from the graph in the Fig. 2, that there is more network residual energy in the proposed algorithm in contrast to the existing techniques. From the column graph in Fig. 3, we can observe that the network lifetime is lengthened while the implementation of the proposed technique in contrast to the existing techniques. Here, we have evaluated the lifetime of the network till the 5% of the total sensor nodes die [29].
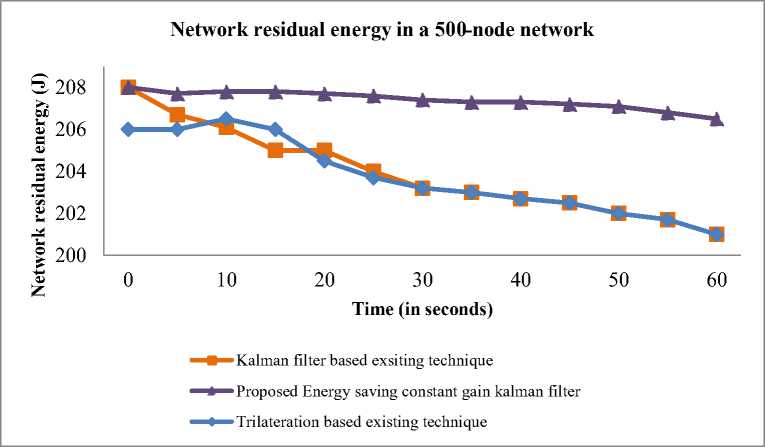
Fig.2. The residual energy for a 500-node network (static base station)
-
■ Trilateration based existing technique
-
■ Kalman filter based exsiting technique
-
■ Proposed Energy saving constant gain kalman filter
Number of nodes
Fig.3. Lifetime of a network (5% of the nodes die), in case of static base station
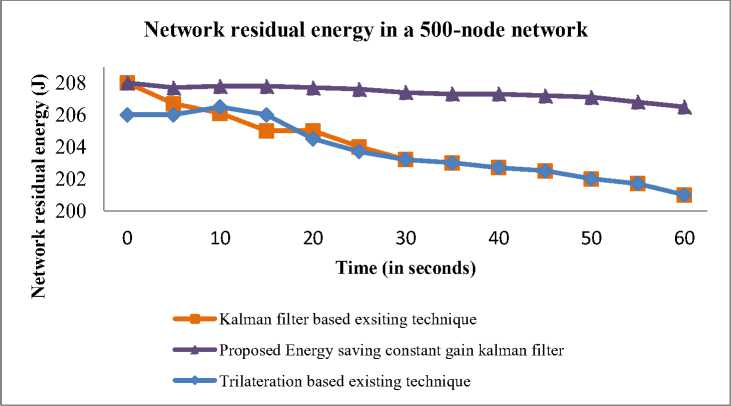
Fig.4. The network residual energy for a 500-node network (mobile base station)
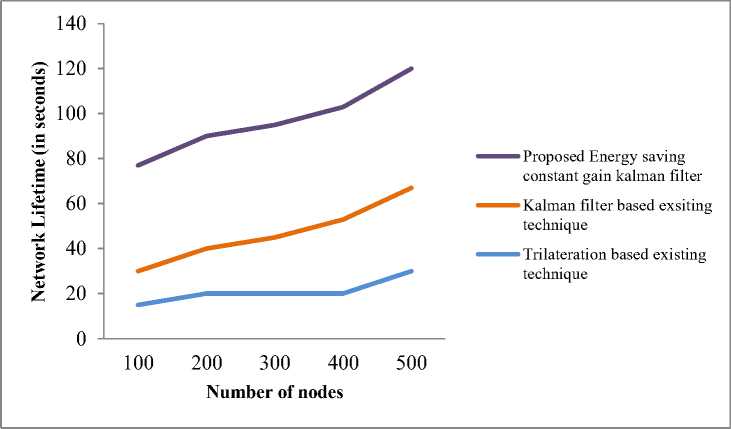
Fig.5. Lifetime of a network (5% of the total sensor nodes die)
We even assessed the performance of the proposed method with the mobile control station model. Here, the tracking accuracy is observed to be unaffected as the position of the base station does not possess any impact over the proposed technique. The energy consumption is not extremely varied because of the moving base station. The comparative assessment of the residual energy in the network along with the lifetime of the network with 500 as the node count can be seen in Fig. 4 and 5, wherein the Fig. 4, demonstrates the residuary energy of the propound method is unaltered because of the motion of the base station.
As per the observation, where the proposed algorithm performs expansion of the network lifetime more than the existing algorithms and also remains unaltered because of the motion of the base station in the proposed technique.
5. Conclusions
This study proposes a new technique that implements target tracking by integrating the clustering mechanism as well as the prediction techniques so as to intensify the lifetime of the wireless sensor network. In this paper, the studies are associated only with the Kalman filters applied to the active and movable targets.
The results obtained show the performance of the proposed technique and its correctness. The proposed techniques also provide precision in tracking the path by reducing the root mean square error, thus yielding more accurate outcomes. The measurement of the performance of the algorithm proposed while the base station is dynamically moving over a pre-identified path. Here, we observe zero effect over the tracking efficiency as the position of the base station does not have any significant role in the algorithm proposed.
From the simulation outcomes, we discovered that the proposed technique upgrades the accuracy of the path prediction to 17.76% as well as 12.01% in contrast to the trilateration as well as the Kalman filter, respectively. It even yields an energy-efficient solution for both the static as well as the mobile base station model. The comparative analysis performed with respect to the network residual energy as well as the network lifetime for a node of 500 shows no effect over the network residual energy because of the mobile base station.
The simulated outcomes are represented as graphs (Fig.4, Fig.5) to conclude that the proposed method shows better performance in comparison to the existing techniques concerning energy efficiency by decreasing the repetitive information sent as well as even expanding the network lifetime.
References Hybrid Energy Regulated Constant Gain Kalman-Filter for Optimized Target Detection and Tracking in Wireless Sensor Networks
- Akyildiz IF, Su W, Sankarasubramaniam Y, Cayirci E. Wireless Sensor Networks: A survey. Computer Networks. 2002;38(4):393–422.
- Wang X, Nie Y. An improved distance vector-hop localization algorithm based on coordinate correction. International Journal of Distributed Sensor Networks. 2017;13(11):155014771774183.
- Barile G, Leoni A, Pantoli L, Stornelli V. Real-time autonomous system for structural and environmental monitoring of dynamic events. Electronics. 2018;7(12):420.
- Jaber AA, Bicker R. Design of a wireless sensor node for vibration monitoring of industrial machinery. International Journal of Electrical and Computer Engineering (IJECE). 2016;6(2):639.
- Mansouri M, Ilham O, Snoussi H, Richard C. Adaptive quantized target tracking in wireless sensor networks. Wireless Networks. 2011;17(7):1625–39.
- Anilkumar AK, Ananthasayanam MR, Subba Rao PV. A constant gain Kalman filter approach for the prediction of re-entry of risk objects. Acta Astronautica. 2007;61(10):831–9.
- Honguntikar V, Biradar GS. Frog-Based Routing Algorithm to Enhance the Network Lifetime of Wireless Sensor Networks. International Journal of Computer Network & Information Security. 2017 Aug 1;9(8).
- Denis S, Berkvens R, Weyn M. A survey on detection, tracking and identification in radio frequency-based device-free localization. Sensors. 2019 Dec 3;19(23):5329.
- Zuo H, Ke W, Chen M, Lu J, Wang Y, Jin J. An Enhanced Radio Tomographic Imaging Localization Method Based on Low-cost Wireless Sensor Networks. In2019 3rd International Conference on Circuits, System and Simulation (ICCSS) 2019 Jun 13 (pp. 197-200). IEEE.
- Mugunthan SR. Novel cluster rotating and routing strategy for software defined wireless sensor networks. Journal of ISMAC. 2020 Jul 6;2(02):140-6.
- Zhang H, Zhou X, Wang Z, Yan H, Sun J. Adaptive consensus-based distributed target tracking with dynamic cluster in sensor networks. IEEE transactions on cybernetics. 2018 Apr 24;49(5):1580-91.
- Leela Rani P, Sathish Kumar GA. Detecting Anonymous Target and Predicting Target Trajectories in Wireless Sensor Networks. Symmetry. 2021 Apr 19;13(4):719.
- Ahmadi H, Viani F, Bouallegue R. An accurate prediction method for moving target localization and tracking in wireless sensor networks. Ad Hoc Networks. 2018 Mar 1;70:14-22.
- Khalifeh A, Rajendiran K, Darabkh KA, Khasawneh AM, AlMomani O, Zinonos Z. On the potential of fuzzy logic for solving the challenges of cooperative multi-robotic wireless sensor networks. Electronics. 2019 Dec 10;8(12):1513.
- Jondhale SR, Deshpande RS. Kalman filtering framework-based real time target tracking in wireless sensor networks using generalized regression neural networks. IEEE Sensors Journal. 2018 Oct 2;19(1):224-33.
- Balakrishnan A, Ramana K, Nanmaran K, Ramachandran M, Bhaskar V, Kallam S. RSSI based localization and tracking in a spatial network system using wireless sensor networks. Wireless Personal Communications. 2022 Mar;123(1):879-915.
- Klaina H, Vazquez Alejos A, Aghzout O, Falcone F. Narrowband characterization of near-ground radio channel for wireless sensors networks at 5G-IoT bands. Sensors. 2018 Jul 26;18(8):2428.
- Chu SC, Dao TK, Pan JS. Identifying correctness data scheme for aggregating data in cluster heads of wireless sensor network based on naive Bayes classification. EURASIP Journal on Wireless Communications and Networking. 2020 Dec;2020(1):1-5.
- Tripathi RP, Singh AK, Gangwar P. Innovation-based fractional order adaptive Kalman filter. Journal of Electrical Engineering. 2020 Feb 1;71(1):60-4..
- Vasuhi S, Vaidehi V. Target tracking using interactive multiple model for wireless sensor network. Information Fusion. 2016 Jan 1;27:41-53..
- Biswas SK, Qiao L, Dempster AG. A quantified approach of predicting suitability of using the Unscented Kalman Filter in a non-linear application. Automatica. 2020 Dec 1;122:109241.
- Lim J, Park HM. Tracking by risky particle filtering over sensor networks. Sensors. 2020 May 31;20(11):3109.
- Ahmadi H, Bouallegue R, Viani F, Massa A. An improved prediction based strategy for target tracking in wireless sensor networks. International Journal of Internet Technology and Secured Transactions. 2018;8(3):453-68..
- Keskin ME, Yiğit V. Maximizing the lifetime in wireless sensor networks with multiple mobile sinks having nonzero travel times. Computers & Industrial Engineering. 2020 Oct 1;148:106719.
- A. Yadav, P. Awasthi, N. Naik, and M. R. Ananthasayanam, “A constant gain Kalman filter approach to track maneuvering targets,” in Proceedings of the IEEE International Conference on Control Applications (CCA ’13), pp. 562–567, August 2013.
- Li S, Li Z, Li J, Fernando T, Iu HH, Wang Q, Liu X. Application of event-triggered cubature Kalman filter for remote nonlinear state estimation in wireless sensor network. IEEE Transactions on Industrial Electronics. 2020 Apr 21;68(6):5133-45.
- Mahamuni CV, Jalauddin ZM. Intrusion Monitoring in Military Surveillance Applications using Wireless Sensor Networks (WSNs) with Deep Learning for Multiple Object Detection and Tracking. In2021 International Conference on Control, Automation, Power and Signal Processing (CAPS) 2021 Dec 10 (pp. 1-6). IEEE.
- Rahman MR, Islam MM, Pritom AI, Alsaawy Y. ASRPH: application specific routing protocol for health care. Computer Networks. 2021 Oct 9;197:108273.
- Biswas S, Das R, Chatterjee P. Energy-efficient connected target coverage in multi-hop wireless sensor networks. InIndustry interactive innovations in science, engineering and technology 2018 (pp. 411-421). Springer, Singapore.
