Идентификация изменений конфигурации транспортной сети на основе космической съёмки

Автор: Михеева Татьяна Ивановна, Федосеев Александр Андреевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4-4 т.18, 2016 года.
Бесплатный доступ
Рассматривается вопрос обнаружения изменений конфигурации транспортной сети на основе построения тематического слоя объектов транспортной сети по космическим снимкам в условиях ограниченного состава спектральных признаков. Предложена технология объектно-ориентированного анализа комплекта снимка на основе комбинированного подхода, сочетающего в себе кластерные и контурные методы обработки изображений.
Тематический слой, транспортная сеть, космический снимок, яркость пикселя, ско значений яркости пикселей
Короткий адрес: https://sciup.org/148204774
IDR: 148204774 | УДК: 004.9
Identification of transport net configuration changes via remotely sensed space imagery
The problem of transport net configuration changes identification is discussed. The principle of identification is based on thematic layer synthesis via remotely sensed space images with the restricted set of spectral features. The technology of object-oriented analysis of space multispectral imagery based on combined approach with the cluster-based and contour-based methods of imagery processing have been offered.
Текст научной статьи Идентификация изменений конфигурации транспортной сети на основе космической съёмки
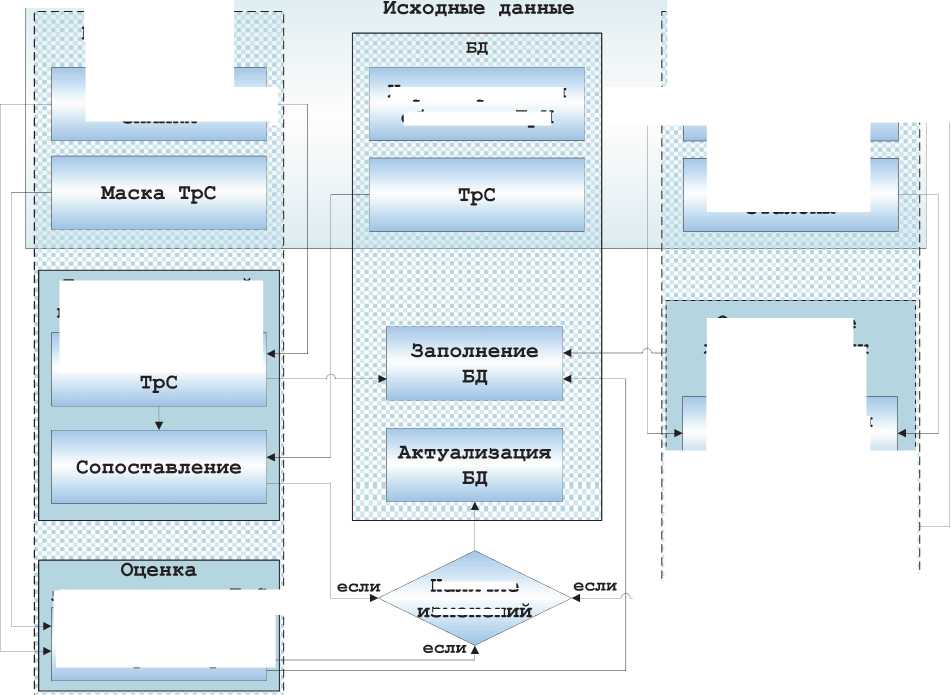
Модернизация транспортной инфраструктуры является неотъемлемой частью экономического развития современного государства. Рост числа и протяжённости автомобильных дорог относится к ряду приоритетных мероприятий по модернизации федеральных и региональных транспортных систем. При этом, становится актуальной задача оперативного выявления и учёта изменений элементов транспортной сети (ТрС), а также определения характеристик и состояния объектов транспортной инфраструктуры (ТрИ) [5]. Значительная площадь территории и большое число субъектов Российской Федерации диктуют необходимость разработки и внедрения подходов к решению указанных задач на основе использования материалов аэрокосмической съёмки (рис. 1).
Согласно представленной схеме предусмотрена двухуровневая поддержка управления состоянием объектов ТрИ на основе информации дистанционного зондирования Земли (ДЗЗ). Для поиска изменений конфигурации дорожной сети, реализуемого на макроуровне, используются спектрозональные снимки высокого пространственного разрешения с космических аппаратов типа «Ресурс-П», охватывающие значительные по площади участки земной поверхности. На локально-детальном уровне производится определение характеристик и состояния объектов ТрИ с использованием материалов гиперспектральной съёмки высокого пространственного разрешения, полученных при помощи беспилотных летательных аппа-
ратов. Результаты интерпретации получаемой информации на каждом из двух уровней заносятся в базу данных. При наличии изменений конфигурации дорожной сети, зафиксированных в результате сопоставления обработанных данных космической съёмки с содержащейся в базе данных информацией, производится актуализация соответствующих данных.
Рассмотрим задачу поиска изменений конфигурации ТрС, реализуемую на макроуровне. В основе решения данной задачи лежит реализация процесса синтеза тематического слоя элементов ТрС на базе комплекта космического снимка с космических аппаратов типа «Ресурс-П», состоящего из мультиспек-трального и панхроматического изображений [3, 9]. Требуется выполнить экстрагирование локальных областей, соответствующих объектам класса «Дорога», на этом снимке в условиях ограниченного состава спектральных признаков. Таким образом, данная задача предполагает проведение так называемого объектноориентированного анализа снимков [10]. Такой подход позволяет объединять спектральные свойства мультиспектральных изображений с пространственной информацией панхроматических изображений для повышения эффективности экстрагирования элементов ТрС урбанизированной территории.
Схема предлагаемой технологии представлена на рис. 2. На вход системы подаётся космический снимок в виде комплекта, состоящего из панхроматического и спектрозонального изображений. На выходе системы формируется упрощённая модель ТрС заданного района, отображаемая в виде осевых линий и используемая впоследствии для поиска изменений конфигурации ТрС. Результаты работы метода, полученные на срезе синтеза результирующего тематического слоя элементов ТрС, могут быть также использованы в других приложениях.
Макроуровень
Космические снимки
Гиперспектраль-ные снимки
Спектральные эталоны
Локально-детальный уровень
Наличие вменен
Характеристики
Классификация
Рис. 1. Схема информационной поддержки управления характеристиками и состоянием объектов ТрИ на основе данных ДЗЗ
Поиск изменении конфигурации ТрС
Экстрагирование
загруженности ТрС
Сегментация автотранспорта
объектов ТрИ
Определение характеристик объектов ТрИ
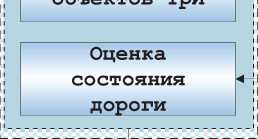
КОМПЛЕКСИРОВАНИЕ ИСХОДНОГО КОМПЛЕКТА ИЗОБРАЖЕНИЙ
В результате операции комплексирования исходного комплекта изображений формируется спектрозональное изображение с числом и границами спектральных каналов, соответствующих числу и границам каналов спектрозонального изображения исходного комплекта, и пространственным разрешением, соответствующим пространственному разрешению панхроматического изображения исходного комплекта, подающегося на вход системы. В качестве метода комплексирования используется подход, описанный в [4] и реализованный в ряде коммерческих программных пакетах обработки информации ДЗЗ.
ФОРМИРОВАНИЕ ГЛОБАЛЬНЫХ ЦЕЛЕВЫХ СЕГМЕНТОВ
С целью предварительного исключения из процесса анализа областей изображения, соответствующих объектам типа «Трава» и «Дерево», для изображения, полученного на предыдущем этапе, производится расчёт вегетационного индекса NDVI :
NDVI =
NIR RED
Р -Р
NIR RED .
Р +Р
Области изображения со значениями NDVI > 0 исключаются и не учитываются в последующем анализе.
Для формирования глобальных сегментов, в состав которых входят области, соответствующие элементам ТрС, производится классификация изображения с использованием метода классификации без учителя k -средних [1, 6]. В контексте рассматриваемой задачи, учитывая разнородность сюжетов анализируемых снимков, использование подходов на основе классификации без учителя более предпочтительно по сравнению с подходами на основе классификации с учителем [7]. Оператор задаёт исходное число кластеров, на которые разбиваются пиксели изображения. В ходе постклассификаци -онной обработки оператор на основе полученного набора кластеров формирует обобщённые классы объектов, соответствующие элементам ТрС.
ВЫДЕЛЕНИЕ КОНТУРОВ ОБЪЕКТОВНА ПАНХРОМАТИЧЕСКОМ ИЗОБРАЖЕНИИ
На вход данного этапа подаётся исходное панхроматическое изображение. В качестве
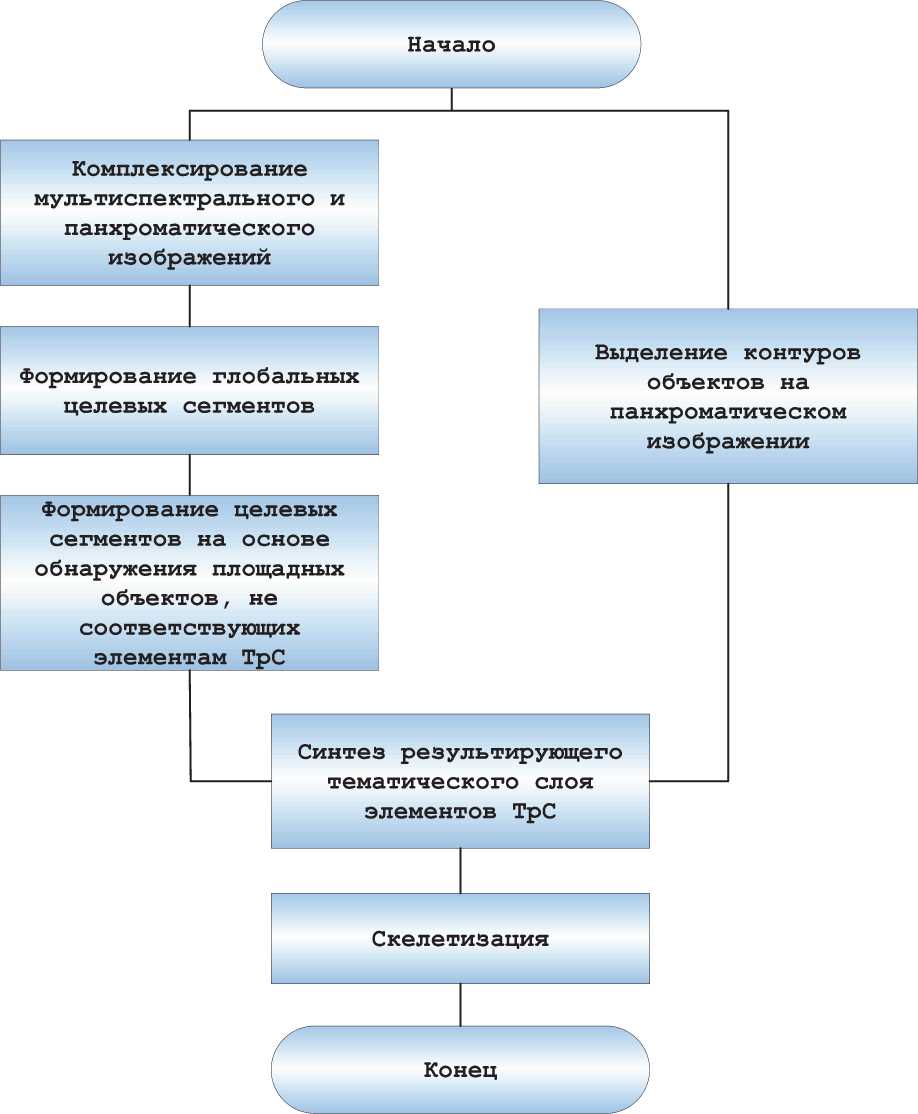
Рис. 2. Схема технологии экстрагирования элементов ТрС на космическом снимке
инструмента выделения контуров объектов на изображении используется детектор границ Кэн-ни, представляющий собой многоступенчатый алгоритм, состоящий из следующих шагов [8]:
. сглаживание;
. поиск градиентов;
. подавление немаксимумов;
. двойная пороговая фильтрация;
. трассировка области неоднозначности.
Метод Кэнни ориентирован на три основных критерия:
. хорошее обнаружение границы (путём по вышения отношения сигнал/шум);
. хорошая локализация (точное определение положения границы);
. единственный отклик на одну границу.
Указанные критерии лежат в основе целевой функции стоимости ошибок, минимизация которой обеспечивает поиск оптимального линейного оператора для свёртки с изображением.
Сглаживание на основе использования первой производной Гауссиана обеспечивает уменьшение чувствительности алгоритма к шуму. Маска Гауссиана выглядит следующим образом:
I = —
|
2 |
4 |
5 |
4 |
2 |
|
4 |
9 |
12 |
9 |
4 |
|
5 |
12 |
15 |
12 |
5 |
|
4 |
9 |
12 |
9 |
4 |
|
2 |
4 |
5 |
4 |
2 |
~
• I ,
где I - изображение, полученное после применения маски Гауссиана, I - исходное изображение. Далее производится вычисление градиента изображения I :
Vf (х, у) = ^ GX + Gy2 ,(3)
6(х, у) = arctg (—),(4)
Gx где 6(х, у) - угол, определяющий направление г дf гd вектора градиента, GY = , G., = - частные х дх у ду производные по двум пространственным осям.
Полученные согласно (4) значения угла направления вектора градиента, округляются до одного из четырёх значений: 0°, 45°, 90°, 135°. Информация о направлении границы используется с целью удаления точки рядом с границей и исключения разрыва границы вблизи локальных максимумов градиента.
Двойная пороговая фильтрация обеспечивает удаление слабых границ. В случае превышения значения градиента в пределах рассматриваемого фрагмента верхнего порога этот фрагмент считается допустимой границей в тех местах, где значение градиента падает ниже этого порога, до тех пор, пока значение не станет ниже нижнего порога. В случае отсутствия на всём фрагменте точек со значением, превышающим верхний порог, то этот фрагмент удаляется. Такой гистерезис обеспечивает уменьшение числа разрывов в границах.
Результирующие границы определяются на основе подавления краёв, несвязанных с определёнными (сильными) границами.
ФОРМИРОВАНИЕ ЦЕЛЕВЫХ
СЕГМЕНТОВ НА ОСНОВЕ ОБНАРУЖЕНИЯ И ИСКЛЮЧЕНИЯ ПЛОЩАДНЫХ ОБЪЕКТОВ, НЕ СООТВЕТСТВУЮЩИХ ЭЛЕМЕНТАМ ТРС
На вход данного этапа подаётся панхроматическое изображение, включающее в себя только глобальные целевые сегменты, полученные в результате классификации спектрозонального изображения. Данный этап является необходимым при обработке изображений урбанизированных сюжетов. При обработке изображений загородных сюжетов, характеризующихся отсутствием большого числа инфраструктурных объектов, данный этап может быть исключен из цепочки обработки. Определяется квадратная область d p с центром в точке p . Область характеризуется длиной стороны a p, задаваемой оператором с учётом условия, что размер области, соответствующей объекту класса «Искусственное_со-оружение», должен превышать размер области, соответствующей объекту класса «Дорога». Область d p проверяется на принадлежность области, обладающей свойствами объекта класса «Искусственное_сооружение»:
— ~ B
^ [ f ( х , у )] ^ 0,( х , у ) g d' , (5)
d t ' > d t ' , (6)
-
— ~ B
где d i – область, соответствующая объекту класса «Искусственное_сооружение», S ~R d i – область, соответствующая объекту класса «Дорога».
-- —
Производится перемещение области d p по изображению в режиме «скользящего окна»
-—-
— p с шагом, соответствующем длине стороны a .
-
-- —
Принадлежность d p области, соответствующей объекту класса «Искусственное_сооружение», определяется следующим выражением: — - — a — — — — — — l —
/ ( I , d p ) = [( ^ d < T — — ) л ( ^ d < T d — ) л ( ^ d < T d — ) л ( ^ d < T d — )]
, d11 da12 da13 _^—l4
где о , о , ст , ст - значения СКО значений яркости пикселей, образующих локальные группы d1 , dl 2 , d l 3 , dl 4 в результате пересечения этих пикселей линиями 1 1 , 1 2 , 1 3 , 1 4 с центром в точке p соответственно в горизонтальном и вертикальном направлениях, а также в двух диагональных пересекающихся направлениях в границах области d p ; T d — - СКО значений яркости пикселей, входящих в области
^^
d11, d12, d13, dl4.
Задаётся пороговое значение T—— СКО значе-d ний яркости пикселей, входящих в области d 11 ,
1п 11
d 2, d 3, d 4 . Если значения СКО по четырём направлениям меньше T—— , объект в границах об-d ласти d p считается однородным. Следовательно, такой объект не принадлежит к классу «Дорога» и должен быть исключён. В случае превышения значения СКО по хотя бы одному направлению порогового значения Td — объект в границах области имеет возможную принадлежность к классу «Дорога». Такой сегмент изображения подлежит анализу на следующих этапах.
Схема формирования целевых сегментов на основе обнаружения площадных объектов, не соответствующих элементам ТрС, показана на рис. 3.
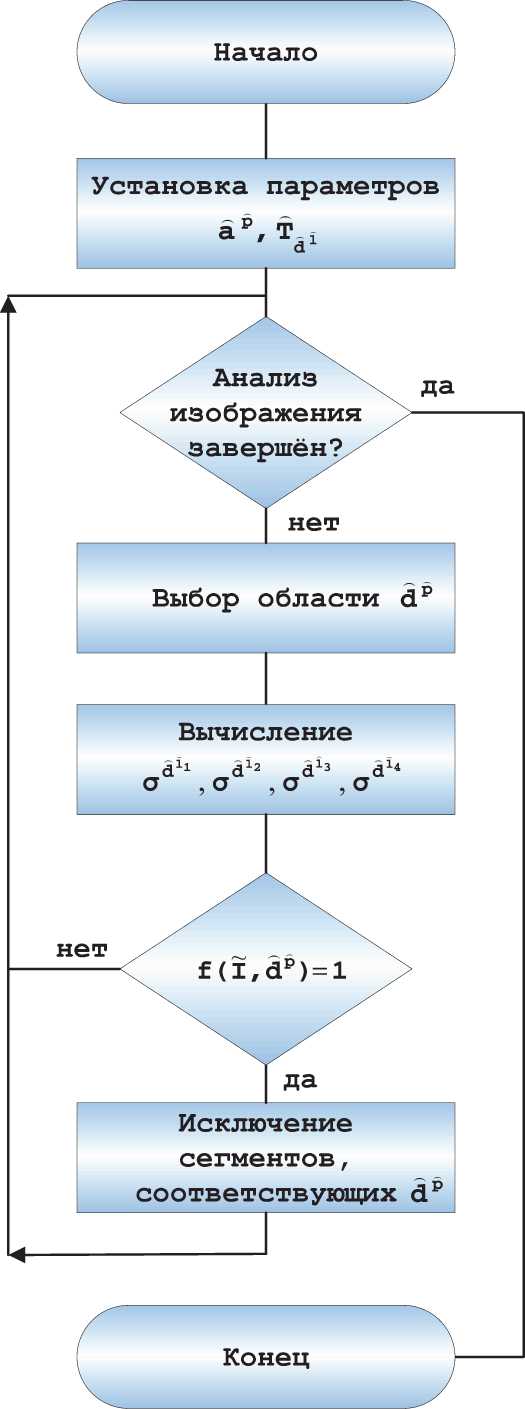
Рис. 3. Схема формирования целевых сегментов на основе обнаружения площадных объектов, не соответствующих элементам ТрС
СИНТЕЗ РЕЗУЛЬТИРУЮЩЕГО ТЕМАТИЧЕСКОГО СЛОЯ ЭЛЕМЕНТОВ ТРАНСПОРТНОЙ СЕТИ
Процесс синтеза результирующего тематического слоя элементов ТрС состоит из двух основных шагов:
. комплексирование результатов, полученных в ходе реализации рассмотренных выше этапов обработки исходного комплекта изображений;
. окончательная сегментация по критерию формы и размеров областей, полученных на предыдущем шаге.
На вход этапа подаются исходные данные в виде следующих предварительных тематических слоёв:
. слой сегментов, образованных в результате обнаружения и исключения площадных объектов, не соответствующих элементам ТрС;
. слой контуров объектов, представленных на исходном панхроматическом изображении.
На первом этапе производится формирование предварительного тематического слоя с изображением сегментов, соответствующих элементам ТрС, так и с изображением малоразмерных локальных сегментов, не соответствующих элементам ТрС и подлежащих дальнейшему исключению.
На втором этапе производится исключение малоразмерных локальных сегментов предварительного тематического слоя.
СКЕЛЕТИЗАЦИЯ
Учитывая, что задача идентификации изменений конфигурации дорожной сети на макроуровне не предполагает определение значений ширины дороги, для записи в базу данных используются осевые линии экстрагированной сети дорог. Для получения осевых линий используется алгоритм скелетизации, основанный на определении и соединении множества всех центров, вписанных в фигуру дороги максимальных окружностей [2].
Описанный в настоящей статье подход обеспечивает экстрагирование элементов ТрС на космических снимках высокого разрешения в условиях отсутствия спектральных признаков на базе объектно-ориентированного подхода. Получаемые результаты обеспечивают построение тематического слоя элементов ТрС с последующей идентификацией изменений её конфигурации во времени.
Список литературы Идентификация изменений конфигурации транспортной сети на основе космической съёмки
- Зимичев Е.А., Казанский Н.Л., Серафимович П.Г. Пространственная классификация гиперспектральных изображений с использованием метода кластеризации k-means++//Компьютерная оптика. 2014. Т. 38. № 2. С. 281-286.
- Местецкий Л.М. Скелетизация многосвязной многоугольной фигуры на основе дерева смежности её границы//Сибирский журнал вычислительной математики. 2006. Т. 9. № 3. С.201-216.
- Михеева Т.И. Построение математических моделей объектов улично-дорожной сети города с использованием геоинформационных технологий//Информационные технологии. 2006. №1. С. 69-75.
- Пат. US006011875A. Process for enhancing the spatial resolution of multispectral imagery using pan-sharpening/Laben et al. -№6,011,875; заявлено 29.04.1998; опубл. 04.01.2000. 9 с.
- Михеева Т.И., Федосеев А.А. Автоматизированная идентификация изменений конфигурации дорожной сети на основе материалов космической сьёмки//Перспективные информационные технологии (ПИТ 2016): труды Международной научно-технической конференции . Самара: Издательство Самарского научного центра РАН, 2016. C. 123-126.
- Шовенгердт Р.А. Дистанционное зондирование: методы и модели обработки изображений. М.: Техносфера, 2010. 560 с.
- Csatho J.F. Schenk A.F. Multi-sensor data fusion for automatic scene interpretation//International archives of photogrammetry and remote sensing. -1998. Vol. 7. Pp. 336-341.
- Ding L., Goshtasby A. On the Canny edge detector . URL: http://soe.rutgers.edu/~meer/TEACH/ADD/cannyedge.pdf (дата обращения 04.09.2016).
- Gao J., Wu L. Automatic extraction of road networks in urban areas from Ikonos imagery based on spatial reasoning . URL: http://www.isprs.org/proceedings/XXXV/congress/comm3/papers/290.pdf (дата обращения 04.09.2016).
- Hussain M. Change detection from remotely sensed images: From pixel-based to object-based approaches//ISPRS Journal of photogrammetry and remote sensing. 2013. Vol. 80. Pp. 81-106.
